
Active Feedback-Driven Defect-Band Steering in Phononic Crystals with Piezoelectric Defects: A Mathematical Approach


Abstract
1. Introduction
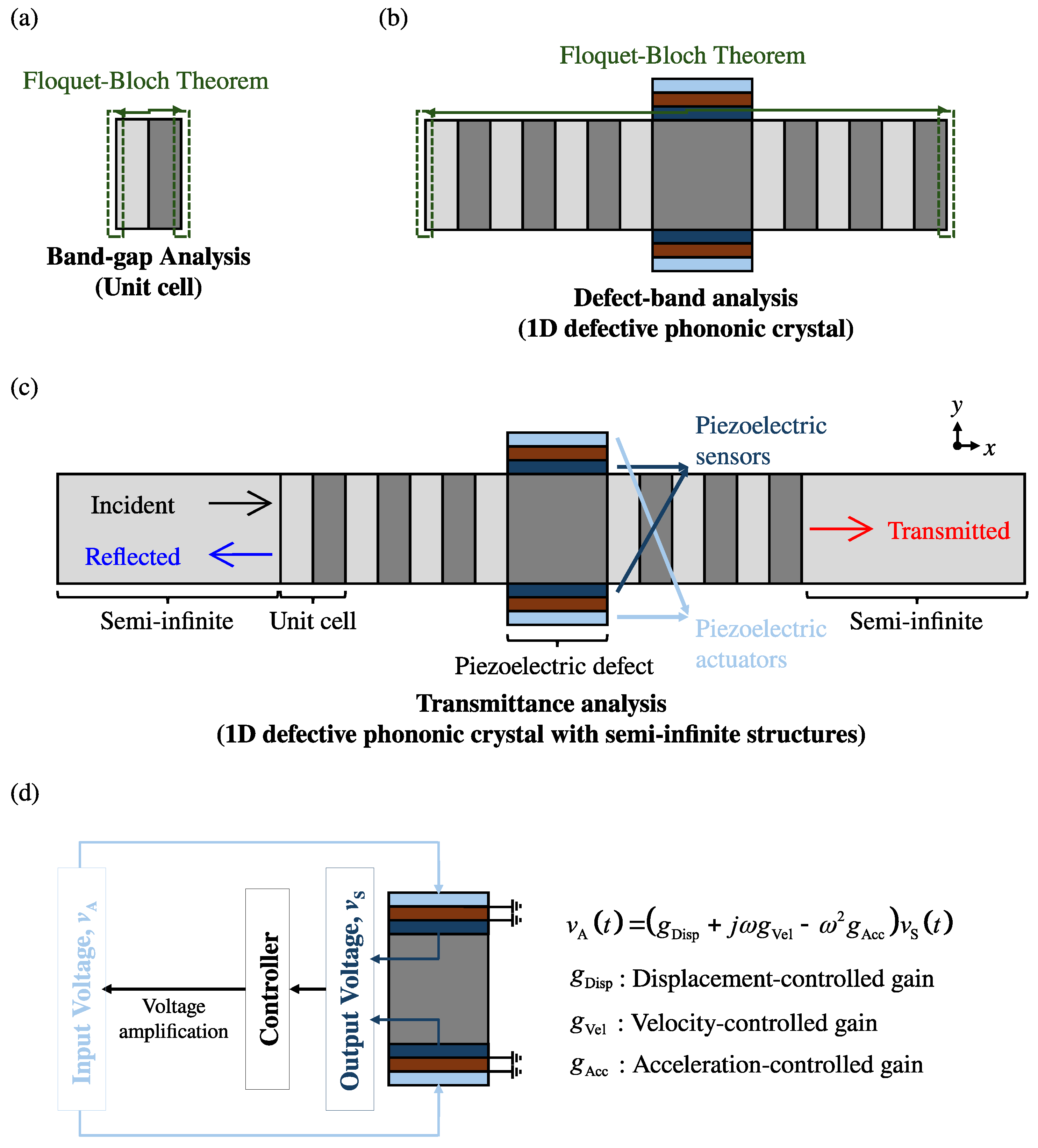
2. Target System Description
3. Analytical Modeling with Active Feedback Control
3.1. Governing Equations and Corresponding Solutions
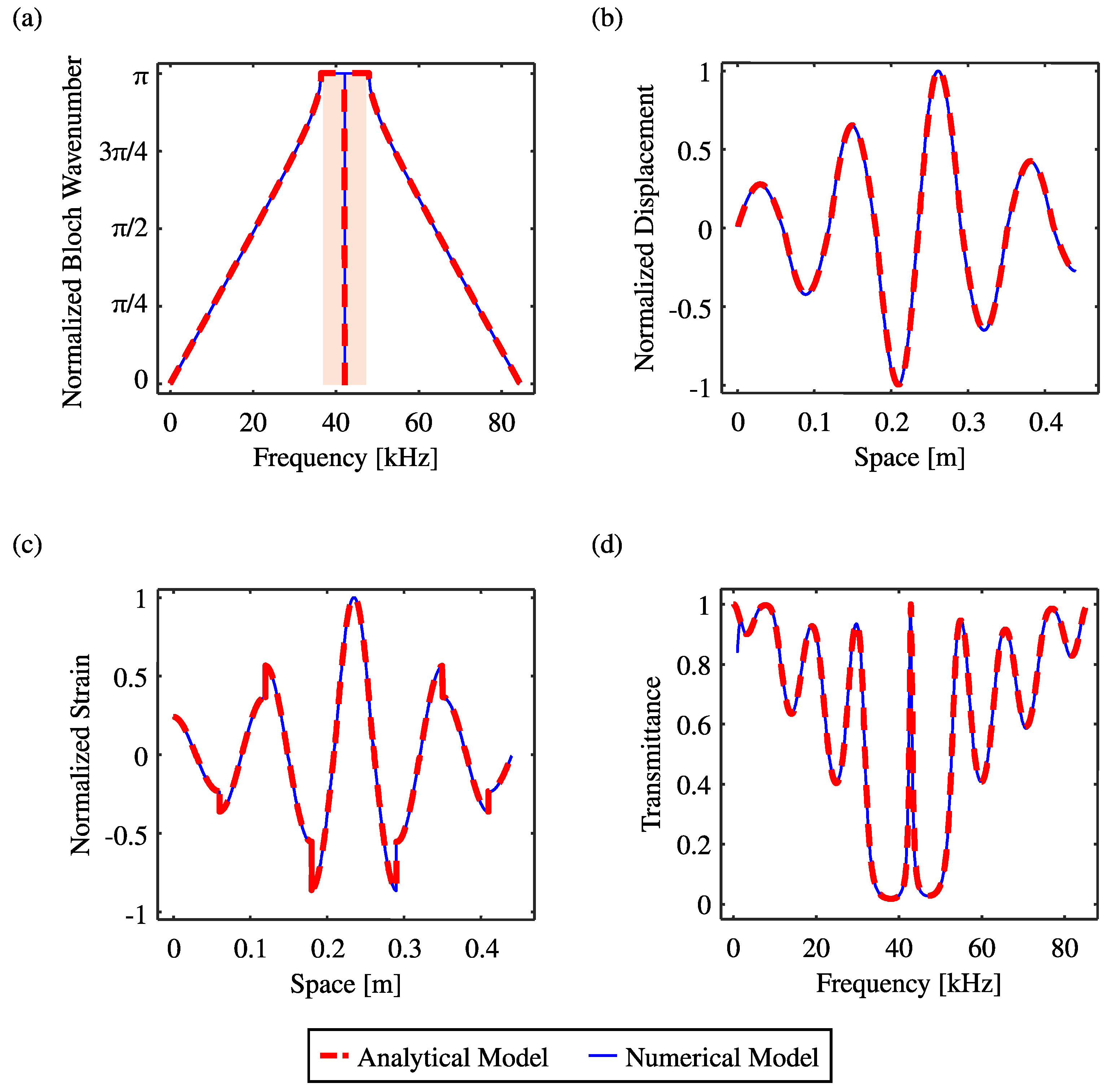
3.2. Prediction in Band Structures and Transmittance FRFs
4. Effectiveness of Active Feedback Control for Tunable Bandpass Filters
4.1. Numerical Settings for Case Studies
4.2. Tunability Performance Assessment
4.2.1. Preliminary Study Without Active Feedback Control
4.2.2. Scenario I—Active Feedback Control Effects of Respective Gains
4.2.3. Scenario II—Active Feedback Control Effects of Combined Gains
5. Conclusions
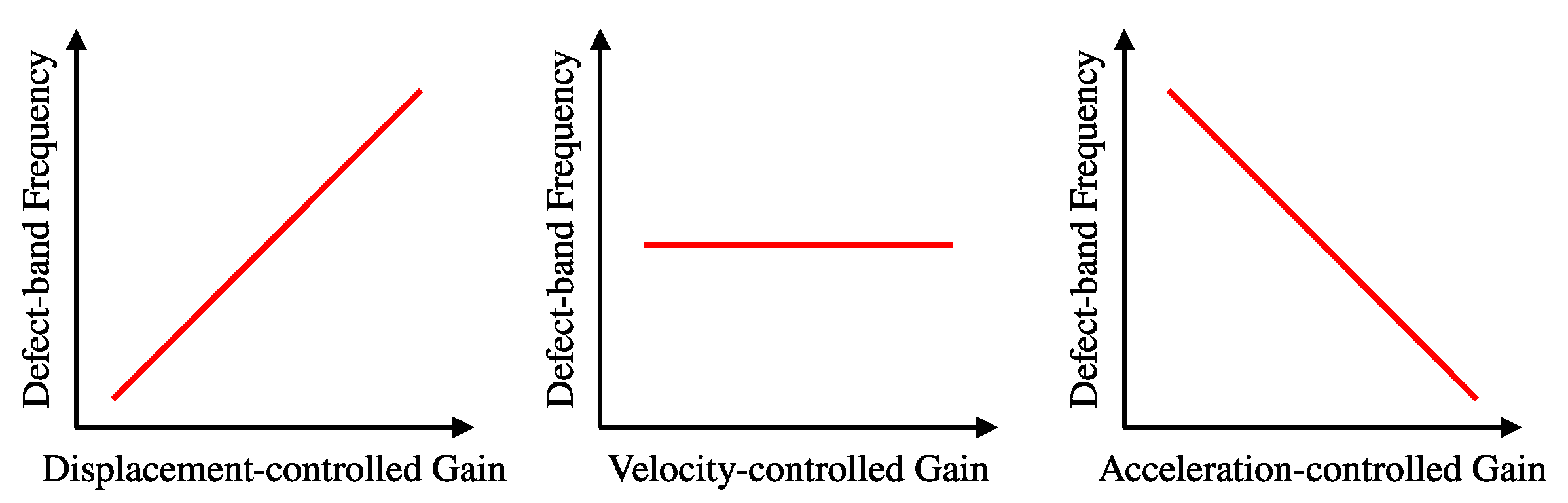
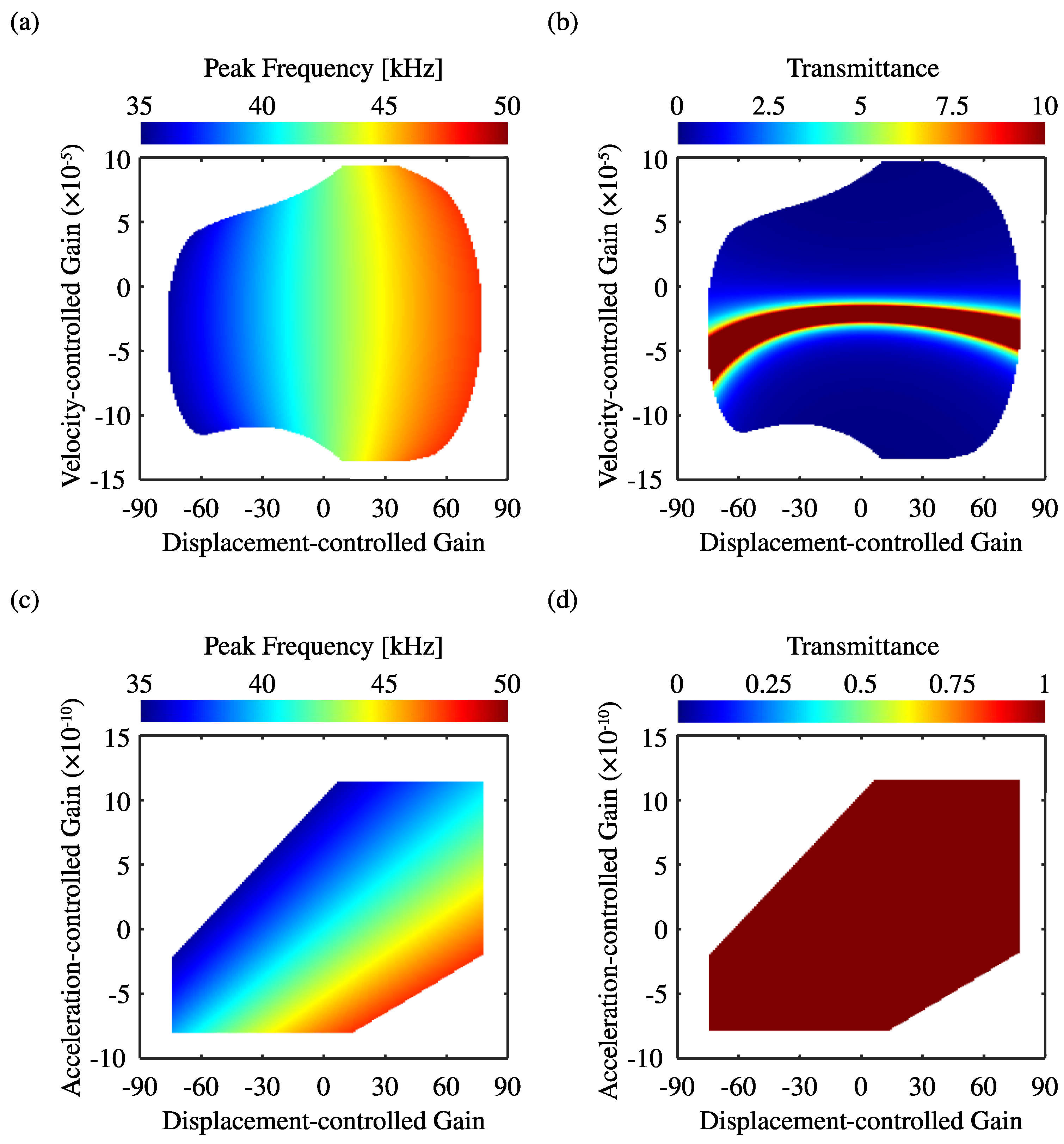
- Displacement-controlled gain facilitated a unidirectional adjustment of the defect-band frequency, either in an upward or a downward direction, across the entire band gap. Concurrently, this gain ensures the preservation of nearly unity transmittance. Positive gain increased the peak frequency, thereby raising it towards the upper band gap frequency. Conversely, negative gain was demonstrated to decrease the peak frequency, thereby lowering it to the lower band gap frequency.
- Acceleration-controlled gain generated frequency shifts that were opposite in sign to those from the displacement-controlled gain. This resulted in heightened sensitivity due to the frequency-squared weighting. Nevertheless, complete transmission efficiency was maintained.
- Velocity-controlled gain was designed to maintain a constant peak frequency while facilitating a wide-range modulation of the transmittance. This innovative feature enabled independent tuning of the filter sensitivity without the need to adjust the operating frequency, thereby enhancing the system’s flexibility and reliability.
- Combined gains provided synergistic control. Displacement- and velocity-controlled gains permitted the concurrent manipulation of the defect-band frequency and enhancement of the bandpass filtering sensitivity. Conversely, displacement- and acceleration-controlled gains enabled highly linear control of the defect-band frequency without compromising sensitivity. These synergistic effects achieved multi-objective filter reconfiguration.
Supplementary Materials
Funding
Data Availability Statement
Conflicts of Interest
References
- Dong, H.W.; Shen, C.; Liu, Z.; Zhao, S.D.; Ren, Z.; Liu, C.X.; He, X.; Cummer, S.A.; Wang, Y.S.; Fang, D.; et al. Inverse design of phononic meta-structured materials. Mater. Today 2024, 80, 824–855. [Google Scholar] [CrossRef]
- Huang, W.; Xu, J.; Yao, Y.; Zhang, Y.; Wang, X.; Han, P. Application of phononic crystals in modern engineering vibration and noise control, a review. Noise Vib. Worldw. 2025, 56, 09574565251333071. [Google Scholar] [CrossRef]
- Lee, J.; Kim, Y.Y. Elastic metamaterials for guided waves: From fundamentals to applications. Smart Mater. Struct. 2023, 32, 123001. [Google Scholar] [CrossRef]
- Akbari-Farahani, F.; Ebrahimi-Nejad, S. From defect mode to topological metamaterials: A state-of-the-art review of phononic crystals & acoustic metamaterials for energy harvesting. Sens. Actuators A Phys. 2024, 365, 114871. [Google Scholar]
- Hu, G.; Tang, L.; Liang, J.; Lan, C.; Das, R. Acoustic-elastic metamaterials and phononic crystals for energy harvesting: A review. Smart Mater. Struct. 2021, 30, 085025. [Google Scholar] [CrossRef]
- Jam, M.T.; Shodja, H.M.; Sanati, M. Band-structure calculation of SH-waves in 1D hypersonic nano-sized phononic crystals with deformable interfaces. Mech. Mater. 2022, 171, 104359. [Google Scholar] [CrossRef]
- Hu, J.; Dong, P.; Cao, J.; Gong, Z.; Hou, R.; Yuan, H. Dynamic bandgap responsiveness of modified re-entrant metamaterials in thermal-mechanical field. J. Mater. Res. Technol. 2024, 30, 7328–7339. [Google Scholar] [CrossRef]
- Jiang, Z.; Zhang, F.; Li, K.; Chai, Y.; Li, W.; Gui, Q. A multi-physics overlapping finite element method for band gap analyses of the magneto-electro-elastic radial phononic crystal plates. Thin-Walled Struct. 2025, 210, 112985. [Google Scholar] [CrossRef]
- Zhang, S.; Bian, X. Tunable defect states of flexural waves in magnetostrictive phononic crystal beams by magneto-mechanical-thermal coupling loadings. Thin-Walled Struct. 2024, 199, 111848. [Google Scholar] [CrossRef]
- Hao, Y.; Huo, Y.; Zhang, W. Locally resonant metamaterial plate with cantilever spiral beam-mass resonators and various piezoelectric defects for energy harvesting. Thin-Walled Struct. 2025, 213, 113259. [Google Scholar] [CrossRef]
- Yao, B.; Wang, S.; Hong, J.; Gu, S. Size and temperature effects on band gap analysis of a defective phononic crystal beam. Crystals 2024, 14, 163. [Google Scholar] [CrossRef]
- Shen, N.; Cong, Y.; Gu, S.; Zhang, G.; Feng, Z.Q. Design of phononic crystals using superposition of defect and gradient-index for enhanced wave focusing. Smart Mater. Struct. 2024, 33, 085034. [Google Scholar] [CrossRef]
- Gao, X.; Qin, J.; Hong, J.; Wang, S.; Zhang, G. Wave propagation characteristics and energy harvesting of magnetically tunable defective phononic crystal microbeams. Acta Mech. 2025, 236, 1579–1597. [Google Scholar] [CrossRef]
- Jo, S.H.; Yoon, H.; Shin, Y.C.; Youn, B.D. Revealing defect-mode-enabled energy localization mechanisms of a one-dimensional phononic crystal. Int. J. Mech. Sci. 2022, 215, 106950. [Google Scholar] [CrossRef]
- He, Z.; Zhang, G.; Chen, X.; Cong, Y.; Gu, S.; Hong, J. Elastic wave harvesting in piezoelectric-defect-introduced phononic crystal microplates. Int. J. Mech. Sci. 2023, 239, 107892. [Google Scholar] [CrossRef]
- Zhang, G.; Gao, X.; Wang, S.; Hong, J. Bandgap and its defect band analysis of flexoelectric effect in phononic crystal plates. Eur. J. Mech.-A/Solids 2024, 104, 105192. [Google Scholar] [CrossRef]
- Xiao, J.; Ding, X.; Huang, W.; He, Q.; Shao, Y. Rotating machinery weak fault features enhancement via line-defect phononic crystal sensing. Mech. Syst. Signal Process. 2024, 220, 111657. [Google Scholar] [CrossRef]
- Sepehri, S.; Mashhadi, M.M.; Fakhrabadi, M.M.S. Active/passive tuning of wave propagation in phononic microbeams via piezoelectric patches. Mech. Mater. 2022, 167, 104249. [Google Scholar] [CrossRef]
- Jin, Y.; Torrent, D.; Rouhani, B.D.; He, L.; Xiang, Y.; Xuan, F.Z.; Gu, Z.; Xue, H.; Zhu, J.; Wu, Q.; et al. The 2024 phononic crystals roadmap. J. Phys. D Appl. Phys. 2025, 58, 113001. [Google Scholar] [CrossRef]
- Ji, G.; Huber, J. Recent progress in acoustic metamaterials and active piezoelectric acoustic metamaterials-a review. Appl. Mater. Today 2022, 26, 101260. [Google Scholar] [CrossRef]
- Khalid, M.Y.; Arif, Z.U.; Tariq, A.; Hossain, M.; Umer, R.; Bodaghi, M. 3D printing of active mechanical metamaterials: A critical review. Mater. Des. 2024, 246, 113305. [Google Scholar] [CrossRef]
- Zhang, X.; Li, Y.; Wang, Y.; Jia, Z.; Luo, Y. Narrow-band filter design of phononic crystals with periodic point defects via topology optimization. Int. J. Mech. Sci. 2021, 212, 106829. [Google Scholar] [CrossRef]
- Lucklum, R.; Mukhin, N. Enhanced sensitivity of resonant liquid sensors by phononic crystals. J. Appl. Phys. 2021, 130, 024508. [Google Scholar] [CrossRef]
- Na, K.; Kim, Y.; Yoon, H.; Youn, B.D. FASER: Fault-affected signal energy ratio for fault diagnosis of gearboxes under repetitive operating conditions. Expert Syst. Appl. 2024, 238, 122078. [Google Scholar] [CrossRef]
- Kim, H.; Park, C.H.; Suh, C.; Chae, M.; Oh, H.J.; Yoon, H.; Youn, B.D. Stator current operation compensation (SCOC): A novel preprocessing method for deep learning-based fault diagnosis of permanent magnet synchronous motors under variable operating conditions. Measurement 2023, 221, 113446. [Google Scholar] [CrossRef]
- Yang, J.; Jo, S.H. Experimental validation for mechanically tunable defect bands of a reconfigurable phononic crystal with permanent magnets. Crystals 2024, 14, 701. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, X.; Gao, Z.; Luo, Y.; Wang, R. Topology optimization of wide-Frequency tunable phononic crystal resonators with a reconstructable point defect. Adv. Theory Simulations 2025, 2401441. [Google Scholar] [CrossRef]
- Zhang, G.; He, Z.; Wang, S.; Hong, J.; Cong, Y.; Gu, S. Elastic foundation-introduced defective phononic crystals for tunable energy harvesting. Mech. Mater. 2024, 191, 104909. [Google Scholar] [CrossRef]
- Linyang, G.; Xiaohui, M.; Zhaoqing, C.; Chunlin, X.; Jun, L.; Ran, Z. Tunable a temperature-dependent GST-based metamaterial absorber for switching and sensing applications. J. Mater. Res. Technol. 2021, 14, 772–779. [Google Scholar] [CrossRef]
- Geng, Q.; Fong, P.K.; Ning, J.; Shao, Z.; Li, Y. Thermally-induced transitions of multi-frequency defect wave localization and energy harvesting of phononic crystal plate. Int. J. Mech. Sci. 2022, 222, 107253. [Google Scholar] [CrossRef]
- Jo, S.H. Temperature-controlled defective phononic crystals with shape memory alloys for tunable ultrasonic sensors. Crystals 2025, 15, 412. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, Z. Magnetically tunable band gaps and defect states of longitudinal waves in hard magnetic soft phononic crystal beams. Eur. J. Mech.-A/Solids 2025, 111, 105575. [Google Scholar] [CrossRef]
- Zhang, S.; Bian, X. Magneto-mechanical-thermal coupling tunability of the topological interface state of longitudinal waves in magnetostrictive phononic crystal beams. Mech. Syst. Signal Process. 2024, 212, 111286. [Google Scholar] [CrossRef]
- Shakeri, A.; Darbari, S.; Moravvej-Farshi, M. Designing a tunable acoustic resonator based on defect modes, stimulated by selectively biased PZT rods in a 2D phononic crystal. Ultrasonics 2019, 92, 8–12. [Google Scholar] [CrossRef] [PubMed]
- Taleb, F.; Darbari, S. Tunable locally resonant surface-acoustic-waveguiding behavior by acoustoelectric interaction in Zn O-based phononic crystal. Phys. Rev. Appl. 2019, 11, 024030. [Google Scholar] [CrossRef]
- Jo, S.H.; Park, M.; Kim, M.; Yang, J. Tunable bandpass filters using a defective phononic crystal shunted to synthetic negative capacitance for longitudinal waves. J. Appl. Phys. 2024, 135, 164502. [Google Scholar] [CrossRef]
- Jo, S.H. Electrically controllable and reversible coupling degree in a phononic crystal with double piezoelectric defects. Thin-Walled Struct. 2024, 204, 112328. [Google Scholar] [CrossRef]
- Mao, J.; Gao, H.; Zhu, J.; Gao, P.; Qu, Y. Analytical modeling of piezoelectric meta-beams with unidirectional circuit for broadband vibration attenuation. Appl. Math. Mech. 2024, 45, 1665–1684. [Google Scholar] [CrossRef]
- Zhou, W.; Chen, W.; Chen, Z.; Lim, C. Actively controllable flexural wave band gaps in beam-type acoustic metamaterials with shunted piezoelectric patches. Eur. J. Mech.-A/Solids 2019, 77, 103807. [Google Scholar] [CrossRef]
- Wang, X.; Song, L.; Xia, P. Active control of adaptive thin-walled beams incorporating bending-extension elastic coupling via piezoelectrically induced transverse shear. Thin-Walled Struct. 2020, 146, 106455. [Google Scholar] [CrossRef]
- Erturk, A.; Inman, D.J. Piezoelectric Energy Harvesting; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Yoon, H.; Youn, B.D.; Kim, H.S. Kirchhoff plate theory-based electromechanically-coupled analytical model considering inertia and stiffness effects of a surface-bonded piezoelectric patch. Smart Mater. Struct. 2016, 25, 025017. [Google Scholar] [CrossRef]
- Huang, B.; Kim, H.S.; Yoon, G.H. Modeling of a partially debonded piezoelectric actuator in smart composite laminates. Smart Mater. Struct. 2015, 24, 075013. [Google Scholar] [CrossRef]
- Shen, W.; Cong, Y.; Gu, S.; Yin, H.; Zhang, G. A generalized supercell model of defect-introduced phononic crystal microplates. Acta Mech. 2024, 235, 1345–1360. [Google Scholar] [CrossRef]
- Leadenham, S.; Erturk, A. Unified nonlinear electroelastic dynamics of a bimorph piezoelectric cantilever for energy harvesting, sensing, and actuation. Nonlinear Dyn. 2015, 79, 1727–1743. [Google Scholar] [CrossRef]
- Sadaf, A.I.; Ahmed, R.U.; Ahmed, H. Cantilever configurations in vibration-based piezoelectric energy harvesting: A comprehensive review on beam shapes and multi-beam formations. Smart Mater. Struct. 2024, 33, 123001. [Google Scholar] [CrossRef]
- Erturk, A.; Inman, D.J. An experimentally validated bimorph cantilever model for piezoelectric energy harvesting from base excitations. Smart Mater. Struct. 2009, 18, 025009. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System parameters | ||
|---|---|---|
| The number of unit cells, N | 7 | |
| Defect location, D | 4 | |
| Mechanical properties | ||
| Magnesium | Density, | 1770 kg/m3 |
| Elastic constant, | 45 GPa | |
| Aluminum | Density, | 2700 kg/m3 |
| Elastic constant, | 70 GPa | |
| Brass | Density, | 8730 kg/m3 |
| Elastic constant, | 91 GPa | |
| PZT-5H | Density, | 7500 kg/m3 |
| Elastic constant, | 60.6 GPa | |
| Electrical properties | ||
| PZT-5H | Piezoelectric coupling coefficient, | −16.6 C/m2 |
| Dielectric constant, | 25.55 nF/m | |
| Geometric dimensions | ||
| Width | Overall structure, | 5 mm |
| Length | Light gray structure, | 30 mm |
| Dark gray structure, | 30 mm | |
| Piezoelectric defect, | 50 mm | |
| Height | Defective PnC, | 5 mm |
| Substrate, | 0.2 mm | |
| Piezoelectric layer, | 0.2 mm | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jo, S.-H. Active Feedback-Driven Defect-Band Steering in Phononic Crystals with Piezoelectric Defects: A Mathematical Approach. Mathematics 2025, 13, 2126. https://doi.org/10.3390/math13132126
Jo S-H. Active Feedback-Driven Defect-Band Steering in Phononic Crystals with Piezoelectric Defects: A Mathematical Approach. Mathematics. 2025; 13(13):2126. https://doi.org/10.3390/math13132126
Chicago/Turabian StyleJo, Soo-Ho. 2025. "Active Feedback-Driven Defect-Band Steering in Phononic Crystals with Piezoelectric Defects: A Mathematical Approach" Mathematics 13, no. 13: 2126. https://doi.org/10.3390/math13132126
APA StyleJo, S.-H. (2025). Active Feedback-Driven Defect-Band Steering in Phononic Crystals with Piezoelectric Defects: A Mathematical Approach. Mathematics, 13(13), 2126. https://doi.org/10.3390/math13132126