
Fault Diagnosis and Identification of Abnormal Variables Based on Center Nearest Neighbor Reconstruction Theory


Abstract
1. Introduction
2. Fault Detection Based on -NN Rules
- (1)
- Collect and standardize training data for normal process, converting it into a matrix with zero mean and unit standard deviation, where and represent sample and variable labels, respectively.
- (2)
- For each sample , its nearest neighbors can be found in the training data set using the Euclidean distance as the indicator. The sum of squares of the nearest distances are calculated between each training sample and other training samples using Equation (2), where represents the th nearest neighbor sample of sample :
- (3)
- (4)
- Standardize real-time data set using the mean and variance of the training data and find its nearest neighbors in the training data set.
- (5)
- Calculate the distance of statistical index .
- (6)
- Compare with the control threshold . If the statistical index is less than the control threshold, , this indicates that the sample is normal. However, faults may occur during the process.
3. Data Reconstruction and Abnormal Variable Identification Methods Based on CNN
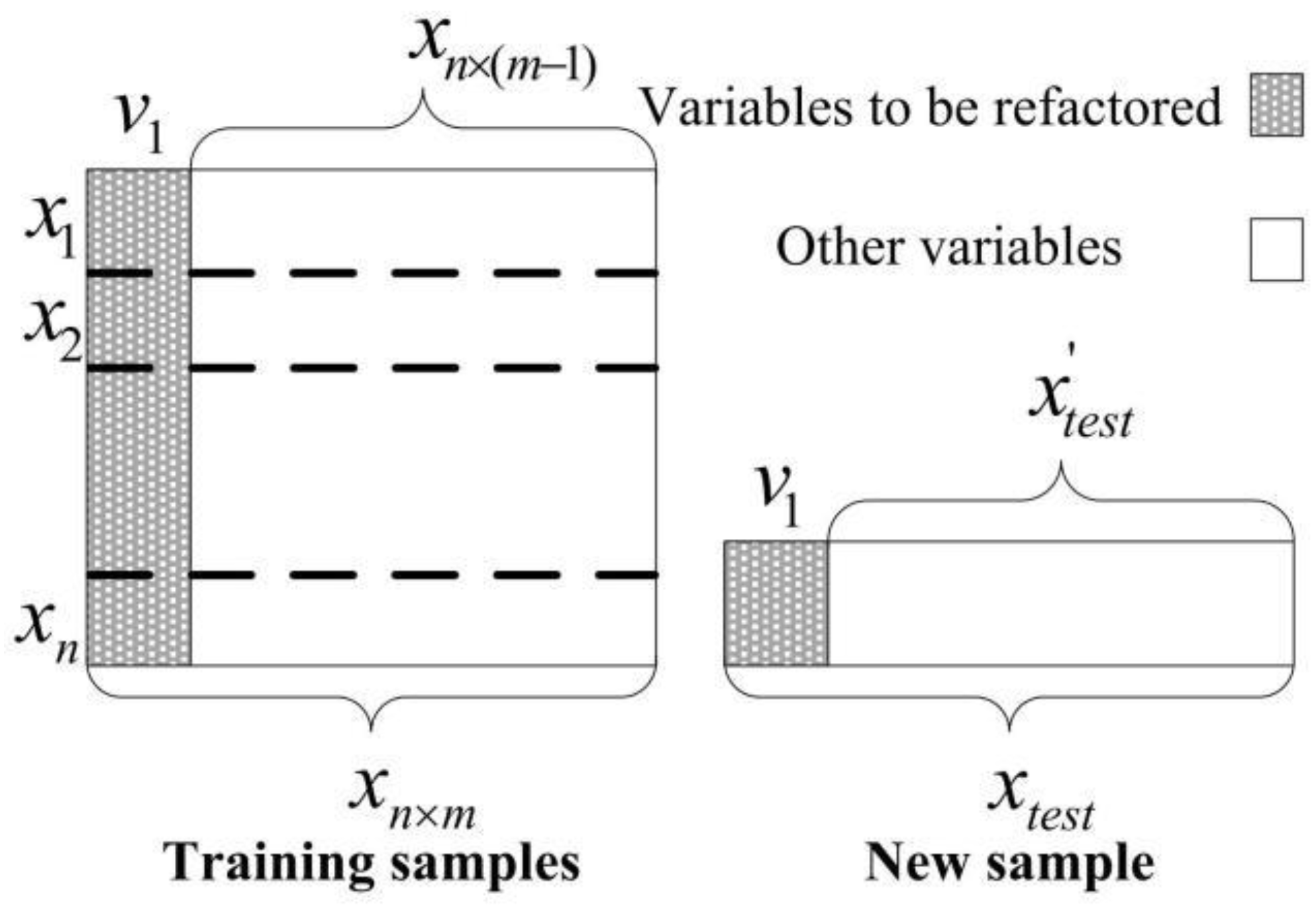
3.1. Data Reconstruction Method
3.2. Abnormal Variable Identification Methods Based on CNN
- Modeling phase
- (a)
- Collect and standardize the normal training data set ;
- (b)
- For each standardized sample, , find its nearest neighbor sample in the training set, and calculate the squared distance between them using Equation (2);
- (c)
- Determine the control threshold .
- Fault detection phase
- (a)
- Collect real-time samples and standardize them using the mean and standard deviation of the modeling data;
- (b)
- For standardized sample , find its nearest sample in the training set, and calculate the squared distance index according to Equation (8), where represents the th variable of , represents the first nearest neighbors of the test sample in the training set, and is the th element in sample :
- (c)
- Compare the distance index and control thresholds to determine whether there is a fault in the real-time sample.
- Data reconstruction and identification of abnormal variablesWhen the distance index is greater than the control threshold , there is a fault in the process and it is necessary to further identify abnormal variables, as shown in Figure 4:
- (a)
- Calculate the statistical index after the CNN reconstructs the first variable.
- (b)
- Reconstruct all variables in and sequentially calculate statistical index ,,…,.
- (c)
- Determine the difference between the statistical index and control limits after reconstructing each variable. Assuming the sorting result is shown in Figure 4, , where , find the variable that reduces the control indicator the most, where a smaller leads to a smaller , indicating that the indicator has decreased more compared to when the fault occurred; this means that probability of the variable being abnormal is higher.
- (d)
- In Figure 4, replace the variable ( in ) with the reconstructed , and calculate control index to determine if it is below the control threshold. If it is greater than the control threshold, replace in with the reconstructed , and calculate control index , iterating from small to large until the control index is within the control threshold. The calculation methods for and are shown in Equations (9) and (10):where represents the data sample obtained by replacing with in ; represents the data sample obtained by replacing and in with and ;
- (e)
- Assuming that only two variables (variables and ) are abnormal in the system, when , only variable is abnormal. When and , variables and are both abnormal variables, as shown in Figure 4.
4. Simulation Experiment Analysis
4.1. Numerical Simulation
4.2. Application Research on the Penicillin Fermentation Process
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sun, H.; Zhang, S.M.; Zhao, C.H.; Gao, F.R. A sparse reconstruction strategy for online fault diagnosis in nonstationary processes with no a priori fault information. IECR 2017, 56, 6993–7008. [Google Scholar] [CrossRef]
- Kanno, Y.; Kaneko, H. Deep convolutional neural network with deconvolution and a deep auto encoder for fault detection and diagnosis. ACS Omega 2022, 7, 2458–2466. [Google Scholar] [CrossRef] [PubMed]
- Zhao, C.H.; Huang, B. A full-condition monitoring method for nonstationary dynamic chemical processes with cointegration and slow feature analysis. AIChE J. 2018, 64, 1662–1681. [Google Scholar] [CrossRef]
- Guo, J.Y.; Zhao, W.J.; Li, Y. Fault detection in multi-modal processes based on the local entropy double subspace. Trans. Inst. Meas. Control 2022, 45, 1323–1336. [Google Scholar] [CrossRef]
- Truong, H.V.A.; Phan, V.D.; Tran, D.T.; Ahn, K.K. A novel observer-based neural-network finite-time output control for high-order uncertain nonlinear systems. Appl. Math. Comput. 2024, 475, 128699. [Google Scholar] [CrossRef]
- Phan, V.D.; Truong, H.V.A.; Le, V.C.; Ho, S.P.; Ahn, K.K. Adaptive neural observer-based output feedback anti-actuator fault control of a nonlinear electro-hydraulic system with full state constraints. Sci. Rep. 2025, 15, 3044. [Google Scholar] [CrossRef]
- Liu, Q.; Zhuo, J.; Lang, Z.Q.; Qin, S.J. Perspectives on data-driven operation monitoring and self-optimization of industrial processes. Acta Autom. Sin. 2018, 44, 1944–1956. [Google Scholar]
- Ji, H.Q.; He, X.; Zhou, D.H. Fault detection techniques based on multivariate statistical analysis. J. Shanghai Jiaotong Univ. 2015, 49, 842–848. [Google Scholar]
- Ji, H.Q. Data-driven sensor fault diagnosis under closed-loop control with slow feature analysis. IEEE Sens. J. 2022, 22, 24299–24308. [Google Scholar] [CrossRef]
- Shang, L.L.; Lu, Z.L.; Wen, C.B. Canonical residual based incipient fault detection and diagnosis for chemical process. Control Theory Appl. 2021, 38, 1247–1256. [Google Scholar]
- Dong, Y.N.; Qin, S.J. A novel dynamic PCA algorithm for dynamic data modeling and process monitoring. J. Process Control 2018, 67, 1–11. [Google Scholar] [CrossRef]
- Chen, Z.W.; Liu, C.; Ding, S.; Peng, T.; Shardt, Y.R. A Just-in-time-learning aided canonical correlation analysis method for multimode process monitoring and fault detection. IEEE Trans. Ind. Electron. 2021, 68, 5259–5270. [Google Scholar] [CrossRef]
- Zhang, C.; Gao, X.W.; Li, Y. Fault detection strategy based on principal component score difference of k nearest neighbors. Acta Autom. Sin. 2020, 46, 2229–2238. [Google Scholar]
- Zhang, Y.; Li, S.; Teng, Y. Dynamic processes monitoring using recursive kernel principal component analysis. Chem. Eng. Sci. 2012, 72, 78–86. [Google Scholar] [CrossRef]
- Zhang, Y.; Hu, Z. Multivariate process monitoring and analysis based on multi-scale KPLS. Chem. Eng. Res. Des. 2011, 89, 2667–2678. [Google Scholar] [CrossRef]
- Zhang, Y.; Hu, Z. On-line batch process monitoring using hierarchical kernel partial least squares. Chem. Eng. Res. Des. 2011, 89, 2078–2084. [Google Scholar] [CrossRef]
- Kourti, T.; MacGregor, J.F. Multivariate SPC methods for process and product monitoring. J. Qual. Technol. 1996, 28, 409–428. [Google Scholar] [CrossRef]
- Dunia, R.; Qin, S.J. Subspace approach to multidimensional fault identification and reconstruction. AIChE J. 1998, 44, 1813–1831. [Google Scholar] [CrossRef]
- Yue, H.H.; Qin, S.J. Reconstruction-based fault identification using a combined index. Ind. Eng. Chem. Res. 2001, 40, 4403–4414. [Google Scholar] [CrossRef]
- He, Q.P.; Wang, J. Fault detection using the k-nearest neighbor rule for semiconductor manufacturing processes. IEEE Trans. Semicond. Manuf. 2007, 20, 345–354. [Google Scholar] [CrossRef]
- He, Q.P.; Wang, J. Large-scale semiconductor process fault detection using a fast pattern recognition-based method. IEEE Trans. Semicond. Manuf. 2010, 23, 194–200. [Google Scholar] [CrossRef]
- Guo, X.P.; Yuan, J.; Li, Y. Feature space k nearest neighbor based batch process monitoring. Acta Autom. Sin. 2014, 40, 135–142. [Google Scholar]
- Wang, G.Z.; Li, J.; Hu, Y.T. Fault identification of chemical processes based on k-NN variable contribution and CNN data reconstruction methods. Sensors 2019, 19, 929. [Google Scholar] [CrossRef] [PubMed]
- Yoo, C.K.; Lee, J.M.; Vanrolleghem, P.A. On-line monitoring of batch processes using multi-way independent component analysis. Chemom. Intell. Lab. Syst. 2004, 71, 151–163. [Google Scholar] [CrossRef]
- Jia, Z.Y.; Wang, P.; Gao, X.J. Process monitoring and fault diagnosis of penicillin fermentation based on improved MICA. Adv. Mater. Res. 2012, 591, 1783–1788. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable (Unit) | Initial Value |
|---|---|
| Concentration of culture medium (g/L) | 15 |
| Reactor liquid level (L) | 100 |
| CO2 concentration (mmol/L) | 0.5 |
| Hydrogen ion concentration (mol/L) | 10−5.1 |
| Temperature (K) | 297 |
| Dissolved oxygen concentration (g/L) | 1.16 |
| Biomass concentration (g/L) | 0.1 |
| Penicillin concentration (g/L) | 0 |
| No. Variable | Meas. Variable | No. Variable | Meas. Variable |
|---|---|---|---|
| 1 | Aeration rate | 9 | CO2 concentration |
| 2 | Agitator power | 10 | PH |
| 3 | Substrate feed rate | 11 | Temperature |
| 4 | Substrate concentration | 12 | Generated heat |
| 5 | Dissolved oxygen concentration | 13 | Acid flow rate |
| 6 | Biomass concentration | 14 | Base flow rata |
| 7 | Penicillin concentration | 15 | Cold water flow rate |
| 8 | Culture volume | 16 | Hot water flow rate |
| No. Fault | Fault Type | Corresponding Process Variables |
|---|---|---|
| 1 | Step/Slope | Aeration rate |
| 2 | Step/Slope | Agitator power |
| 3 | Step/Slope | Substrate feed rate |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, G.; Zhou, R.; Li, F.; Li, X.; Zhang, X. Fault Diagnosis and Identification of Abnormal Variables Based on Center Nearest Neighbor Reconstruction Theory. Mathematics 2025, 13, 2035. https://doi.org/10.3390/math13122035
Wang G, Zhou R, Li F, Li X, Zhang X. Fault Diagnosis and Identification of Abnormal Variables Based on Center Nearest Neighbor Reconstruction Theory. Mathematics. 2025; 13(12):2035. https://doi.org/10.3390/math13122035
Chicago/Turabian StyleWang, Guozhu, Ruizhe Zhou, Fei Li, Xiang Li, and Xinmin Zhang. 2025. "Fault Diagnosis and Identification of Abnormal Variables Based on Center Nearest Neighbor Reconstruction Theory" Mathematics 13, no. 12: 2035. https://doi.org/10.3390/math13122035
APA StyleWang, G., Zhou, R., Li, F., Li, X., & Zhang, X. (2025). Fault Diagnosis and Identification of Abnormal Variables Based on Center Nearest Neighbor Reconstruction Theory. Mathematics, 13(12), 2035. https://doi.org/10.3390/math13122035