

Context-Aware Markov Sensors and Finite Mixture Models for Adaptive Stochastic Dynamics Analysis of Tourist Behavior

Abstract
1. Introduction
2. Related Work
2.1. Context-Aware Stochastic Models
2.2. Finite Mixture Models for Behavior Analysis
2.3. Sensor-Enhanced Behavioral Modeling
2.4. Markov Models in Tourism Research
3. Background and Preliminaries
3.1. Markov Chains and Stochastic Processes
3.2. Contextual Data in Behavioral Modeling
3.3. Finite Mixture Models (FMMs)
3.4. Illustrative Example of Tourist State Transitions
- (1)
- Cultural Site (CS): Museums, historical monuments
- (2)
- Commercial Area (CA): Shopping districts, markets
- (3)
- Dining Zone (DZ): Restaurants, food streets
- (4)
- Transport Hub (TH): Metro stations, bus terminals
- (5)
- Hotel District (HD): Accommodation areas
3.5. State Space Design and Behavioral Sensitivity Analysis
- (1)
- Behavioral Distinctness: , ensuring transitions from each state follow unique distributions (measured via KL divergence). is the Kullback-Leibler divergence. is the transition probability distribution from state . is a threshold parameter ( > 0). The Behavioral Distinctness criterion ensures that each state in our Markov model represents a genuinely distinct behavioral pattern rather than arbitrary divisions of the state space. This is measured by examining how differently tourists behave when transitioning out of each state.
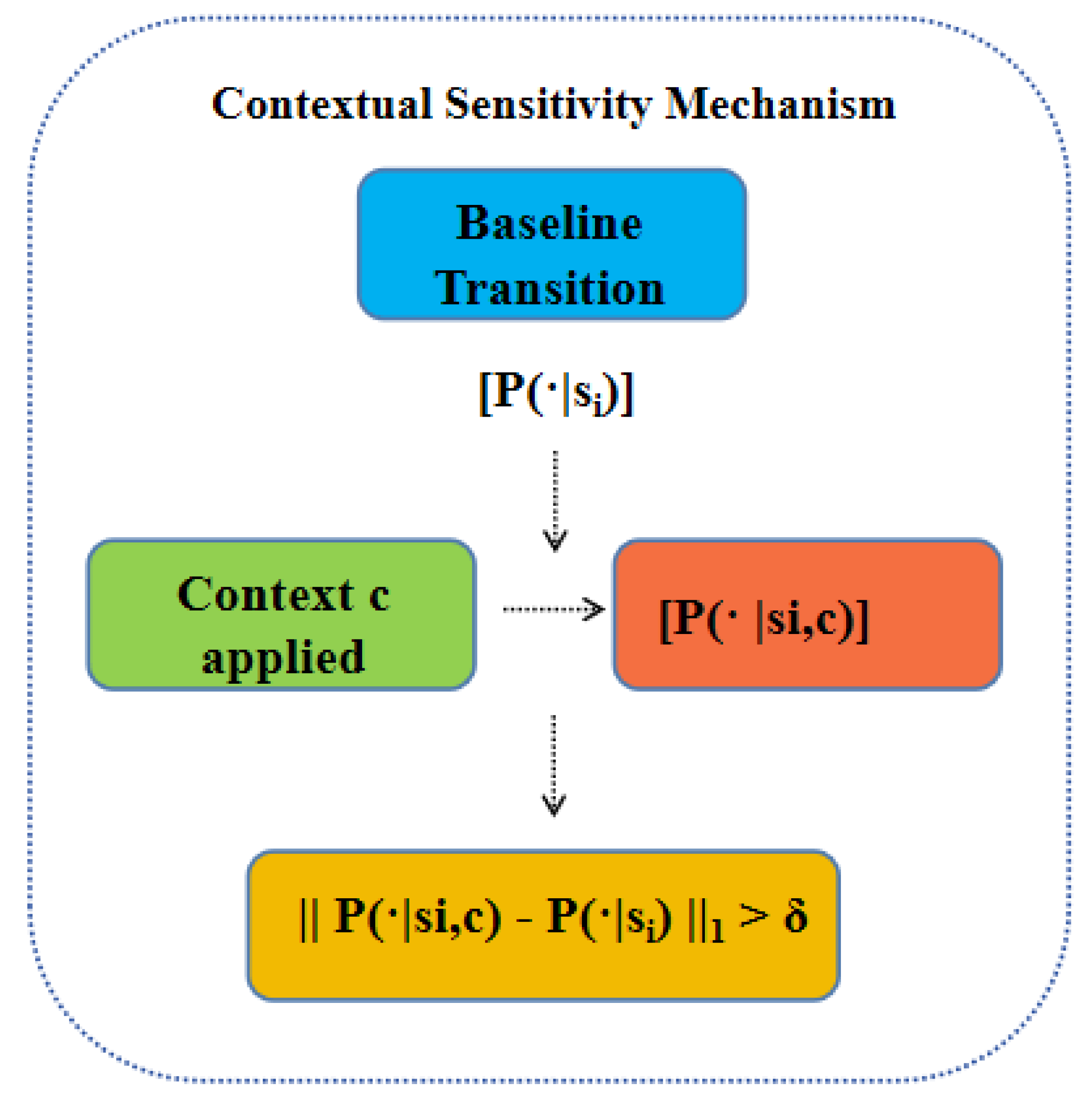
- (2)
- Contextual Sensitivity: where , guaranteeing states respond meaningfully to contextual changes. is the set of all possible contexts. is the baseline transition distribution. is the context-conditioned transition distribution. is the L1-norm (sum of absolute differences). is the sensitivity threshold ( > 0).
- Cultural Site: 0.2
- Commercial Area: 0.3
- Hotel: 0.5
- Cultural Site: 0.4 (+0.2)
- Commercial Area: 0.4 (+0.1)
- Hotel: 0.2 (−0.3)
- (1)
- Contextual Dimension Selection
- Weather conditions (precipitation, temperature)
- Event indicators (festivals, concerts)
- Temporal factors (time of day, day of week)
- (2)
- Contextual Dimension Selection
- (3)
- State Validation Pipeline
- Compute ‖P(·|si, c) − P(·|si)‖1 for all (si, c) pairs
- Retain states where maxc ‖ΔP‖ > δ
- For marginal cases (δ − ε < ‖ΔP‖ < δ + ε), consult domain experts
- Detectable Signals—It ensures that measurable contextual changes (signals) influence state transitions, allowing the system to recognize shifts in tourist behavior.
- Threshold Activation Mechanism—The δ threshold provides a mathematical foundation for determining when a contextual change is significant enough to trigger a state transition, improving the system’s responsiveness.
- Meaningful Behavioral Changes—By validating that regime switches correspond to practically significant behavioral variations, we ensure that detected transitions reflect real-world dynamics rather than noise.
4. Context-Aware Markov Model with Virtual Sensors
4.1. Virtual Sensor Design and Shock Detection
- (1)
- Compute its historical distribution over a representative training period (typically 6–12 months of tourism data).
- (2)
- Set τi at the 90th percentile of this distribution for shock detection (adjustable between 85th and 95th based on application requirements).
- (3)
- Validate the threshold through backtesting on held-out validation data.
- (1)
- Individual Sensor Activation: Each virtual sensor δi monitors its assigned contextual dimension (e.g., weather, event intensity) and triggers when ci > τi. Our experiments showed sensor-specific precision rates ranging from 82 to 94% for different contextual factors.
- (2)
- Composite Shock Determination: The weighted sum Δ aggregates these individual detections, with weights wi learned through logistic regression on historical shock responses. A shock is confirmed when Δ exceeds Δcrit = 0.7 (optimized via grid search on validation data), indicating multiple corroborating contextual anomalies.
4.2. Finite Mixture Models for Behavioral Regimes
4.3. Dynamic Regime Switching Mechanism
4.4. Case Study: Regime Switching During Festival Events
- (a)
- Increased crowd density measurements (physical sensor data)
- (b)
- Social media activity spikes (virtual sensor data)
- (c)
- Event calendar triggers (contextual metadata)
- (1)
- Regime 1 (Normal): From Dining Zone (DZ), transitions are distributed as [CS:0.10, CA:0.20, DZ:0.10, TH:0.40, HD:0.20]
- (2)
- Regime 2 (Festival): Under festival conditions, the same DZ transitions become [CS:0.25, CA:0.35, DZ:0.05, TH:0.25, HD:0.10], showing:
- (a)
- Increased movement to cultural sites (CS from 10% to 25%)
- (b)
- Reduced returns to transport hubs (TH from 40% to 25%)
- (c)
- Higher commercial area visits (CA from 20% to 35%)
4.5. Practical Interpretation of Key Components: A Weather Event Example
- (1)
- Contextual Change Detection (Virtual Sensors)
- Weather sensor: Precipitation exceeds 25 mm/hr (τ = 20 mm threshold).
- Crowd density sensor: Museum indoor areas exceed 2 persons/m2 (τ = 1.8).
- Transport sensor: Taxi requests surge by 180% (τ = 150%).
- (2)
- Regime Transition (Finite Mixture Model)
- (3)
- Behavioral Adaptation (Transition Matrices)
- 30% increase in TH→HD transitions (0.15→0.20)
- 45% increase in CS→Museum transitions (0.20→0.29)
- 60% decrease in CS→Park transitions (0.25→0.10)
- (4)
- Real-World Interpretation
- Groups sheltering in museums rather than continuing outdoor tours
- Families cutting visits short to return to hotels
- Individuals opting for taxis instead of walking between sites
5. Experimental Setup
5.1. Dataset Description
5.2. Baseline Methods
- (1)
- Standard Markov Chain (SMC): A conventional first-order Markov model with maximum likelihood estimation of transition probabilities [40]. This baseline represents the simplest form of sequential modeling without any contextual adaptation.
- (2)
- Context-Aware Markov Model (CAMM): An extension that incorporates contextual features through feature-weighted transition matrices. This method conditions transitions on observed context but lacks explicit shock detection or regime-switching capabilities.
- (3)
- Hierarchical Hidden Markov Model (HHMM): A multi-layered extension that models behavioral patterns at different temporal granularities [41]. While capable of capturing some behavioral variations, this approach does not explicitly model contextual shocks.
5.3. Evaluation Metrics
- (1)
- Transition Accuracy (TA): Measures the proportion of correctly predicted next-state transitions:
- (2)
- Contextual Adaptation Score (CAS): Quantifies the model’s responsiveness to contextual changes by comparing performance during shock versus non-shock periods:
- (3)
- Regime Identification Accuracy (RIA): Evaluates the correctness of identified behavioral regimes against expert-labeled ground truth when available:
5.4. Implementation Details
6. Experimental Results
6.1. Comparative Performance Analysis
6.2. Shock Response Characteristics
6.3. Regime-Specific Dynamics
- Weather-affected regimes: Showed the highest divergence ( = 1.24) due to radical activity shifts (e.g., indoor vs. outdoor transitions).
- Weekday vs. weekend: Exhibited moderate divergence ( = 0.62), reflecting predictable variations in activity schedules.
- Morning vs. evening: Demonstrated the lowest divergence ( = 0.38), suggesting temporal patterns are less disruptive than contextual shocks.
6.4. Ablation Study
7. Discussion and Future Work
7.1. Limitations and Robustness of the Proposed Framework
7.2. Broader Applications and Cross-Domain Adaptation
7.3. Key Research Findings and Implications
7.4. Ethical Implications and Privacy-Preserving Extensions
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liu, J.; Li, X.; Yang, Y.; Tan, Y.; Geng, T.; Wang, S. Short-and Long-Term Prediction and Determinant Analysis of Tourism Flow Networks: A Novel Steady-State Markov Chain Method. Tour. Manag. 2025, 109, 105139. [Google Scholar] [CrossRef]
- Chen, X.; Zhang, H.; Wong, C.U.I. Optimization Study of Tourism Total Revenue Prediction Model Based on the Grey Markov Chain: A Case Study of Macau. AIMS Math. 2024, 9, 16187–16202. [Google Scholar] [CrossRef]
- Zheng, Z.; Shanjiang, Z.; Lijun, S.; Atabak, M. Modelling Changes in Travel Behaviour Mechanisms through a High-Order Hidden Markov Model. Transp. A Transp. Sci. 2024, 20, 2130731. [Google Scholar]
- Ariel, B.; Bracha, S.; Lior, R. Context Aware Markov Chains Models. Knowl.-Based Syst. 2023, 282, 111083. [Google Scholar]
- Agac, S.; Incel, O.D. Resource-Efficient, Sensor-Based Human Activity Recognition with Lightweight Deep Models Boosted with Attention. Comput. Electr. Eng. 2024, 117, 109274. [Google Scholar] [CrossRef]
- Tan, Z.; Wu, Y. On Regime Switching Models. Mathematics 2025, 13, 1128. [Google Scholar] [CrossRef]
- Katsevich, A.; Bandeira, A.S. Likelihood Maximization and Moment Matching in Low SNR Gaussian Mixture Models. Commun. Pure Appl. Math. 2023, 76, 788–842. [Google Scholar] [CrossRef]
- Changqiao, X.; Tao, Z.; Xiaohui, K.; Zan, Z.; Shui, Y. Context-Aware Adaptive Route Mutation Scheme: A Reinforcement Learning Approach. IEEE Internet Things J. 2021, 8, 13528–13541. [Google Scholar]
- Więcek, P.; Kubek, D. The Impact Time Series Selected Characteristics on the Fuel Demand Forecasting Effectiveness Based on Autoregressive Models and Markov Chains. Energies 2024, 17, 4163. [Google Scholar] [CrossRef]
- Feng, W.; Li, Y.; Chen, S. What Has Influenced the Growth and Structural Transformation of China’s Cultural Industry?—Based on the Input-Output Bias Analysis. Appl. Econ. 2025, 1–14. [Google Scholar] [CrossRef]
- Jia, X.; Sedehi, O.; Papadimitriou, C.; Katafygiotis, L.S.; Moaveni, B. Nonlinear Model Updating through a Hierarchical Bayesian Modeling Framework. Comput. Methods Appl. Mech. Eng. 2022, 392, 114646. [Google Scholar] [CrossRef]
- Xiao, S.; Zhang, J.; Ye, J.; Zheng, J. Establishing Region-Specific N–Vs Relationships through Hierarchical Bayesian Modeling. Eng. Geol. 2021, 287, 106105. [Google Scholar] [CrossRef]
- Borucka, A.; Kozłowski, E.; Parczewski, R.; Antosz, K.; Gil, L.; Pieniak, D. Supply Sequence Modelling Using Hidden Markov Models. Appl. Sci. 2022, 13, 231. [Google Scholar] [CrossRef]
- Newlin, R.M.; Rajamurugan, A. A Novel Context-Aware Computing Framework with the Internet of Things and Prediction of Sensor Rank Using Random Neural XG-Boost Algorithm. J. Electr. Eng. Technol. 2024, 19, 2621–2636. [Google Scholar]
- Wang, Y.; Yao, S. Neural Stochastic Differential Equations with Neural Processes Family Members for Uncertainty Estimation in Deep Learning. Sensors 2021, 21, 3708. [Google Scholar] [CrossRef]
- Barbour, D.; Zhou, Z.; Marticorena, D.; Wong, Q.W.; Browning, J.; Wilbur, K.; Davey, P.; Seitz, A.; Gardner, J. Multitask Machine Learning of Contrast Sensitivity Functions. J. Vis. 2024, 24, 1082. [Google Scholar] [CrossRef]
- Li, L.; Pei, Z.; Li, Q.; Hao, F.; Chen, X.; Chen, J. Identifying Tourism Attractiveness Based on Intra-Destination Tourist Behaviour: Evidence from Wi-Fi Data. Curr. Issues Tour. 2024, 27, 3131–3149. [Google Scholar] [CrossRef]
- Stratton, C.; Hoegh, A.; Rodhouse, T.J.; Green, J.L.; Banner, K.M.; Irvine, K.M. Clustering and Unconstrained Ordination with Dirichlet Process Mixture Models. Methods Ecol. Evol. 2024, 15, 1720–1732. [Google Scholar] [CrossRef]
- Zhang, J.Z.; Chang, C.-W. Consumer Dynamics: Theories, Methods, and Emerging Directions. J. Acad. Mark. Sci. 2021, 49, 166–196. [Google Scholar] [CrossRef]
- BenSaïda, A. The Frequency of Regime Switching in Financial Market Volatility. J. Empir. Financ. 2015, 32, 63–79. [Google Scholar] [CrossRef]
- Zheng, K.; Xu, W.; Zhang, X. Multivariate Regime Switching Model Estimation and Asset Allocation. Comput. Econ. 2021, 61, 165–196. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, P.; Li, J.; Xiao, Z.; Shi, H. Attentive Hybrid Recurrent Neural Networks for Sequential Recommendation. Neural Comput. Appl. 2021, 33, 1091–11105. [Google Scholar] [CrossRef]
- Mena, G.; Coussement, K.; De Bock, K.W.; De Caigny, A.; Lessmann, S. Exploiting Time-Varying RFM Measures for Customer Churn Prediction with Deep Neural Networks. Ann. Oper. Res. 2024, 339, 765–787. [Google Scholar] [CrossRef]
- Rayani, P.K.; Changder, S. Sensor-Based Continuous User Authentication on Smartphone through Machine Learning. Microprocess. Microsyst. 2023, 96, 104750. [Google Scholar] [CrossRef]
- Imbert, F.; Anquetil, E.; Soullard, Y.; Tavenard, R. Mixture-of-Experts for Handwriting Trajectory Reconstruction from IMU Sensors. Pattern Recognit. 2025, 161, 111231. [Google Scholar] [CrossRef]
- Guo, Y.; Liu, X.; Peng, S.; Jiang, X.; Xu, K.; Chen, C.; Wang, Z.; Dai, C.; Chen, W. A Review of Wearable and Unobtrusive Sensing Technologies for Chronic Disease Management. Comput. Biol. Med. 2021, 129, 104163. [Google Scholar] [CrossRef]
- Tan, C.; Wang, Y.; Lu, X.; Wu, J.; Zhang, G.; Bai, Z. Research on Lean Analysis Algorithm for Equipment Centralized Monitoring in Big Data Era. J. Phys. Conf. Ser. 2020, 1437, 012085. [Google Scholar] [CrossRef]
- Nasr Azadani, M.; Boukerche, A. Driving Behavior Analysis Guidelines for Intelligent Transportation Systems. IEEE Trans. Intell. Transp. Syst. 2022, 23, 6027–6045. [Google Scholar] [CrossRef]
- Dilek, E.; Dener, M. Computer Vision Applications in Intelligent Transportation Systems: A Survey. Sensors 2023, 23, 2938. [Google Scholar] [CrossRef]
- Guo, B.; Li, M.; Zhou, M.; Zhang, F.; Wang, P. A New Anomalous Travel Demand Prediction Method Combining Markov Model and Complex Network Model. Phys. A Stat. Mech. Its Appl. 2023, 619, 128697. [Google Scholar] [CrossRef]
- Hu, Y.-C. Predicting Foreign Tourists for the Tourism Industry Using Soft Computing-Based Grey–Markov Models. Sustainability 2017, 9, 1228. [Google Scholar] [CrossRef]
- Ilsé, B.; Andrea, S. Forecasting Tourism Demand Cycles: A Markov Switching Approach. Int. J. Tour. Res. 2022, 24, 759–774. [Google Scholar]
- Hwang, H.J.; Kim, Y.R.; Park, S.; Chung, N. Effects of Weather and Air Quality on Travel Behavior. Tour. Manag. Perspect. 2025, 57, 101366. [Google Scholar] [CrossRef]
- AlMutairi, B.S.; Small, M.J.; Grossmann, I. Utilization of El Niño–Southern Oscillation Projected by Climate Models in Improvement of Seasonal Precipitation Predictability. Int. J. Climatol. 2023, 43, 4491–4505. [Google Scholar] [CrossRef]
- Du, Y.; Zhang, Q.; Fu, S.; Hou, Y.; Han, H. DCLMD: Dynamic Clustering and Label Mapping Distribution for Constructing in-Context Learning Demonstrations. J. Supercomput. 2025, 81, 738. [Google Scholar] [CrossRef]
- Chen, X.; Zhang, H.; Wong, C.U.I. Phase-Adaptive Federated Learning for Privacy-Preserving Personalized Travel Itinerary Generation. Tour. Hosp. 2025, 6, 100. [Google Scholar] [CrossRef]
- Wang, Q.; Guo, G.; Qian, G.; Jiang, X. Distributed Online Expectation-Maximization Algorithm for Poisson Mixture Model. Appl. Math. Model. 2023, 124, 734–748. [Google Scholar] [CrossRef]
- JunHo, Y.; Chang, C. Real-Time Context-Aware Recommendation System for Tourism. Sensors 2023, 23, 3679. [Google Scholar]
- Chen, S.; Zhang, Z.; Yan, S.; Chen, J. Enterprise Environmental Governance and Fluoride Consumption Management in the Global Sports Industry. Fluoride 2025, 58, 1. [Google Scholar]
- Wang, S.; Sun, F.; Liu, M.Q. Energy Distance-Based Subsampling Markov Chain Monte Carlo. Sci. China Math. 2025, 1–24. [Google Scholar] [CrossRef]
- Shahzadi, A.; Wang, T.; Parry, M.; Bebbington, M. Modelling Time-Inhomogeneous Incomplete Records of Point Processes Using Variants of Hidden Markov Models. In Advances in Data Analysis and Classification; Springer: Berlin/Heidelberg, Germany, 2025; pp. 1–29. [Google Scholar]
- Gao, J.; Ozbay, K.; Hu, Y. Real-Time Anomaly Detection of Short-Term Traffic Disruptions in Urban Areas through Adaptive Isolation Forest. J. Intell. Transp. Syst. 2025, 29, 269–286. [Google Scholar] [CrossRef]
- Zhu, C.; Wang, M.; Su, C. Prediction of Consumer Repurchase Behavior Based on LSTM Neural Network Model. Int. J. Syst. Assur. Eng. Manag. 2021, 13, 1042–1053. [Google Scholar] [CrossRef]
- Basile, L.J.; Carbonara, N.; Pellegrino, R.; Panniello, U. Business Intelligence in the Healthcare Industry: The Utilization of a Data-Driven Approach to Support Clinical Decision Making. Technovation 2023, 120, 102482. [Google Scholar] [CrossRef]
- Kim, J.W.; Edemacu, K.; Kim, J.S.; Chung, Y.D.; Jang, B. A Survey of Differential Privacy-Based Techniques and Their Applicability to Location-Based Services. Comput. Secur. 2021, 111, 102464. [Google Scholar] [CrossRef]
- Dai, G.; Tang, J.; Zeng, J.; Hu, C.; Zhao, C. Road Network Traffic Flow Prediction: A Personalized Federated Learning Method Based on Client Reputation. Comput. Electr. Eng. 2024, 120, 109678. [Google Scholar] [CrossRef]
- Kumar, A.; Misra, S.C.; Chan, F.T. Leveraging AI for Advanced Analytics to Forecast Altered Tourism Industry Parameters: A COVID-19 Motivated Study. Expert Syst. Appl. 2022, 210, 118628. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| From\To | CS | CA | DZ | TH | HD |
|---|---|---|---|---|---|
| CS | 0.1 | 0.25 | 0.3 | 0.2 | 0.15 |
| CA | 0.15 | 0.2 | 0.35 | 0.15 | 0.15 |
| DZ | 0.1 | 0.2 | 0.1 | 0.4 | 0.2 |
| TH | 0.35 | 0.25 | 0.15 | 0.1 | 0.15 |
| HD | 0.4 | 0.2 | 0.2 | 0.1 | 0.1 |
| Transition | Normal (π1) | Festival (π2) | ΔP | Behavioral Interpretation |
|---|---|---|---|---|
| DZ→CS | 0.1 | 0.25 | 0.15 | Increased cultural visits during events |
| DZ→TH | 0.4 | 0.25 | −0.15 | Reduced early departures |
| CS→HD | 0.15 | 0.05 | −0.1 | Longer evening activities |
| Regime | Initial Weight | Updated Weight | Key Behavioral Characteristics |
|---|---|---|---|
| Fair weather | 0.85 | 0.35 | High outdoor activity transitions |
| Inclement weather | 0.12 | 0.6 | Increased indoor/transport transitions |
| Festival | 0.03 | 0.05 | Unaffected in this scenario |
| Method | Transition Accuracy (TA) | CAS (Shock—Non-Shock) | Regime ID Accuracy (RIA) |
|---|---|---|---|
| Standard MC | 0.601 ± 0.021 | −0.152 ± 0.031 | N/A |
| Context-Aware MC | 0.653 ± 0.018 | −0.087 ± 0.027 | N/A |
| Hierarchical HMM | 0.627 ± 0.019 | −0.121 ± 0.029 | 0.412 ± 0.025 |
| Proposed Method | 0.742 ± 0.015 | +0.112 ± 0.022 | 0.783 ± 0.017 |
| Variant | Transition Accuracy | CAS | RIA |
|---|---|---|---|
| Full Model | 0.742 | +0.112 | 0.783 |
| w/o Virtual Sensors | 0.698 (−5.9%) | +0.031 | 0.761 |
| w/o FMM | 0.672 (−9.4%) | −0.045 | N/A |
| Static Thresholds | 0.715 (−3.6%) | +0.082 | 0.724 |
| Single Regime | 0.601 (−19.0%) | −0.152 | N/A |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, X.; Zhang, H.; Wong, C.U.I.; Song, Z. Context-Aware Markov Sensors and Finite Mixture Models for Adaptive Stochastic Dynamics Analysis of Tourist Behavior. Mathematics 2025, 13, 2028. https://doi.org/10.3390/math13122028
Chen X, Zhang H, Wong CUI, Song Z. Context-Aware Markov Sensors and Finite Mixture Models for Adaptive Stochastic Dynamics Analysis of Tourist Behavior. Mathematics. 2025; 13(12):2028. https://doi.org/10.3390/math13122028
Chicago/Turabian StyleChen, Xiaolong, Hongfeng Zhang, Cora Un In Wong, and Zhengchun Song. 2025. "Context-Aware Markov Sensors and Finite Mixture Models for Adaptive Stochastic Dynamics Analysis of Tourist Behavior" Mathematics 13, no. 12: 2028. https://doi.org/10.3390/math13122028
APA StyleChen, X., Zhang, H., Wong, C. U. I., & Song, Z. (2025). Context-Aware Markov Sensors and Finite Mixture Models for Adaptive Stochastic Dynamics Analysis of Tourist Behavior. Mathematics, 13(12), 2028. https://doi.org/10.3390/math13122028