
Physics-Informed Neural Networks for Higher-Order Nonlinear Schrödinger Equations: Soliton Dynamics in External Potentials


Abstract
1. Introduction
2. Completely Integrable Higher-Order Equations of the NLSE Hierarchy with the Linear Potential
3. Non-Autonomous Soliton Solutions of the Higher-Order NLSE Models
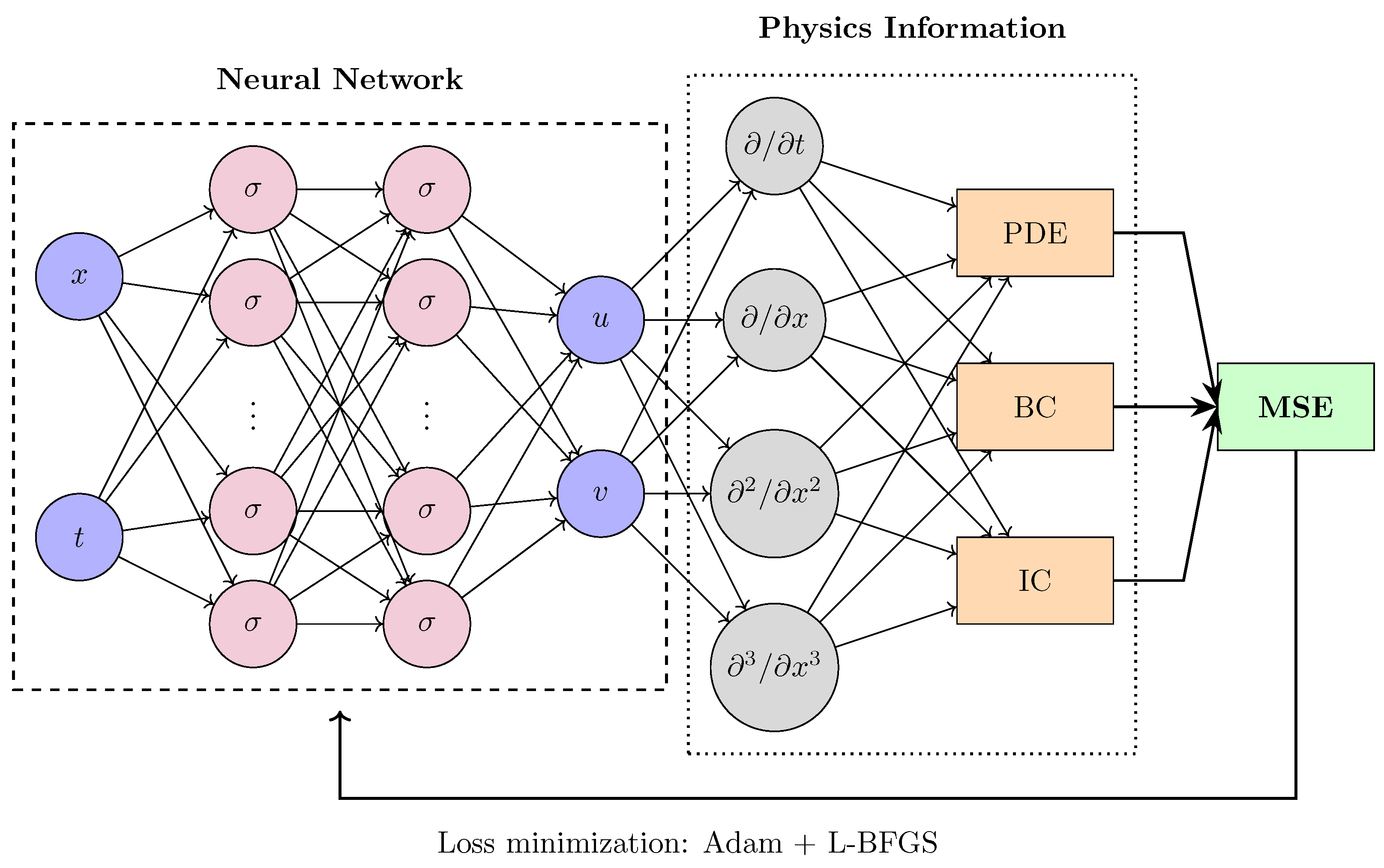
4. Physics-Informed Neural Network Technique
4.1. Problem Statement
4.2. Examples of NLSE Solutions Computed with PINNs
4.3. Application of PINNs for the NLSE with External Potentials
4.4. Performance Analysis of the PINN Method
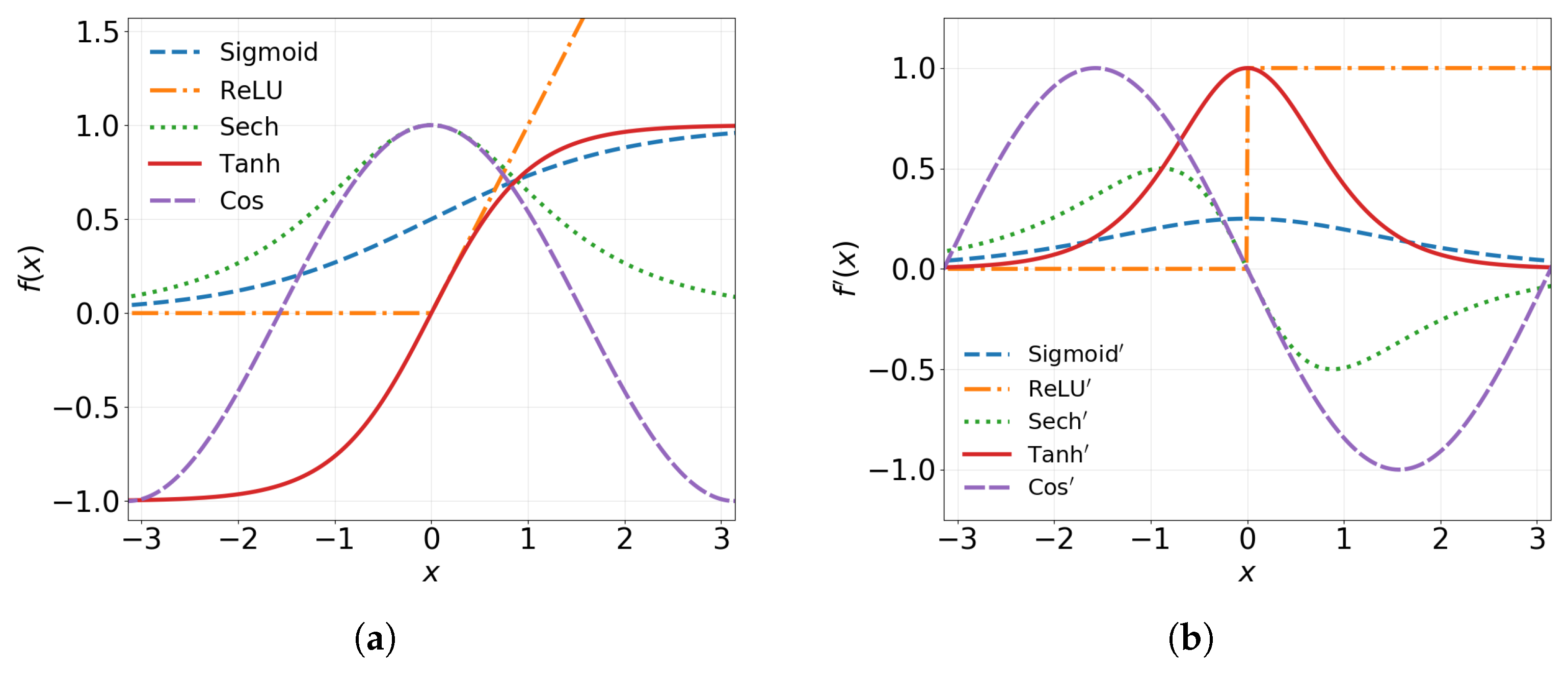
4.4.1. Impact of the Activation Functions
4.4.2. Impact of Neural Network Architecture
4.4.3. Impact of the Number of Sampling Points
4.4.4. Impact of the Sampling Method
5. Examples of Higher-Order NLSE Hierarchy Solutions Computed with PINNs
5.1. PINN Application to the Complex mKdV Equation
5.2. PINN Application for the Hirota Equation
5.3. PINN Application to Higher-Order Equations of the NLSE Hierarchy
6. Conclusions and Perspectives
- (1)
- PINNs are not constrained by a computational grid, and tend to scale better as dimensionality increases. In contrast, classical methods become computationally expensive in higher spatial dimensions due to the curse of dimensionality. These advantages make PINNs particularly well-suited for high-dimensional problems such as those involving stochastic PDEs.
- (2)
- PINNs naturally integrate observational data into the learning process, enabling simultaneous optimization of unknown physical parameters and system states.
- (3)
- PINNs can handle cases where the available data are sparse, incomplete, or irregularly spaced. They also offer greater flexibility by incorporating complex forms of PDEs directly into the loss function, such as higher-order terms or arbitrary potentials.
- (4)
- The PINN framework offers geometric flexibility, as it can accommodate irregular or dynamically changing domains without the need to re-generate the computational mesh.
- (5)
- PINNs may outperform traditional solvers in ill-posed or noise-sensitive problems, particularly when the goal is to infer hidden parameters or fields from partial observations.
- (6)
- Efficient and robust numerical methods for solving higher-order PDEs, particularly nonlinear ones, remain an active area of development. In this context, the application of PINNs to such problems is especially relevant.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Winston, P.H. Artificial Intelligence; Addison-Wesley: Reading, MA, USA, 1992. [Google Scholar]
- Mitchell, T.M. Machine Learning; McGraw-Hill: New York, NY, USA, 1997. [Google Scholar]
- Bishop, C.M. Pattern Recognition and Machine Learning; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Rumelhart, D.; Hinton, G.; Williams, R. Learning representations by back-propagating errors. Nature 1986, 323, 533–536. [Google Scholar] [CrossRef]
- Hortnik, K. Approximation Capabilities of Multilayer Feedforward Networks. Neural Netw. 1991, 4, 251–257. [Google Scholar] [CrossRef]
- Glorot, X.; Bordes, A.; Bengio, Y. Deep Sparse Rectifier Neural Networks. In Proceedings of the Fourteenth International Conference on Artificial Intelligence and Statistics PLMR, Fort Lauderdale, FL, USA, 11–13 April 2011; Volume 15, pp. 315–323. [Google Scholar]
- LeCun, Y.A.; Bottou, L.; Orr, G.B.; Müller, K.R. Efficient BackProp. In Neural Networks: Tricks of the Trade; Lecture Notes in Computer Science; Montavon, G., Orr, G.B., Müller, K.R., Eds.; Springer: Berlin/Heidelberg, Germany, 2012; Volume 7700. [Google Scholar]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436. [Google Scholar] [CrossRef]
- Pierangeli, D.; Marcucci, G.; Conti, C. Photonic extreme learning machine by free-space optical propagation. Photonics Res. 2021, 9, 1446. [Google Scholar] [CrossRef]
- Boscolo, S.; Dudley, J.M.; Finot, C. Modelling self-similar parabolic pulses in optical fibres with a neural network. Results Opt. 2021, 3, 100066. [Google Scholar] [CrossRef]
- Martins, G.R.; Silva, L.C.; Segatto, M.R.; Rocha, H.R.; Castellani, C.E. Design and analysis of recurrent neural networks for ultrafast optical pulse nonlinear propagation. Opt. Lett. 2022, 47, 5489. [Google Scholar] [CrossRef]
- Boscolo, S.; Dudley, J.M.; Finot, C. Predicting nonlinear reshaping of periodic signals in optical fibre with a neural network. Opt. Commun. 2023, 542, 129563. [Google Scholar] [CrossRef]
- Raissi, M.; Perdikaris, P.; Karniadakis, G.E. Physics Informed Deep Learning (Part I): Data-driven Solutions of Nonlinear Partial Differential Equations. arXiv 2017, arXiv:1711.10561. [Google Scholar]
- Raissi, M.; Perdikaris, P.; Karniadakis, G.E. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations. J. Comput. Phys. 2019, 378, 686–707. [Google Scholar] [CrossRef]
- Raissi, M. Physics-Informed Neural Networks (PINNs)—GitHub Repository. Available online: https://github.com/maziarraissi/PINNs (accessed on 15 May 2025).
- Jagtap, A.D.; Kharazmi, E.; Karniadakis, G.E. Conservative physics-informed neural networks on discrete domains for conservation laws: Applications to forward and inverse problems. Comput. Methods Appl. Mech. Eng. 2020, 365, 113028. [Google Scholar] [CrossRef]
- Karniadakis, G.E.; Kevrekidis, I.G.; Lu, L.; Perdikaris, P.; Wang, S.; Yang, L. Physics-informed machine learning. Nat. Rev. 2021, 422, 440. [Google Scholar] [CrossRef]
- Wang, S.; Teng, Y.; Perdikaris, P. Understanding and mitigating gradient flow pathologies inphysics-informed neural networks. SIAM J. Sci. Comput. 2021, 43, A3055–A3081. [Google Scholar] [CrossRef]
- Cuomo, S.; Di Cola, V.S.; Giampaolo, F.; Rozza, G.; Raissi, M.; Piccialli, F. Scientific Machine Learning Through Physics–Informed Neural Networks: Where we are and What’s Next. J. Sci. Comput. 2022, 92, 88. [Google Scholar] [CrossRef]
- Li, J.; Chen, Y. Solving second-order nonlinear evolution partial differential equations using deep learning. Commun. Theor. Phys. 2020, 72, 105005. [Google Scholar] [CrossRef]
- Pu, J.; Li, J.; Chen, Y. Soliton, breather and rogue wave solutions for solving the nonlinear Schrödinger equation using a deep learning method with physical constraints. Chin. Phys. B 2021, 30, 060202. [Google Scholar] [CrossRef]
- Li, J.; Chen, Y. A deep learning method for solving third-order nonlinear evolution equations. Commun. Theor. Phys. 2020, 72, 115003. [Google Scholar] [CrossRef]
- Li, J.; Chen, Y. A physics-constrained deep residual network for solving the sine-Gordon equation. Commun. Theor. Phys. 2020, 73, 015001. [Google Scholar] [CrossRef]
- Fang, Y.; Wu, G.-Z.; Kudryashov, N.A.; Wang, Y.-Y.; Dai, C.-Q. Data-driven soliton solutions and model parameters of nonlinear wave models via the conservation-law constrained neural network method. Chaos Solitons Fractals 2022, 158, 112118. [Google Scholar] [CrossRef]
- Fang, Y.; Wu, G.-Z.; Wang, Y.-Y.; Dai, C.-Q. Data-driven femtosecond optical soliton excitations and parameters discovery of the high-order NLSE using the PINN. Nonlinear Dyn 2021, 105, 603–616. [Google Scholar] [CrossRef]
- Kharazmi, E.; Zhang, Z.Q.; Karniadakis, G.E. hp-VPINNs: Variational physics-informed neural networks with domain decomposition. Comput. Methods Appl. Mech. Eng. 2021, 374, 113547. [Google Scholar] [CrossRef]
- Fang, Y.; Bo, W.-B.; Wang, R.-R.; Wang, Y.-Y.; Dai, C.-Q. Predicting nonlinear dynamics of optical solitons in optical fiber via the SCPINN. Chaos Solitons Fractals 2022, 165, 112908. [Google Scholar] [CrossRef]
- Wang, L.; Yan, Z. Data-driven peakon and periodic peakon travelling wave solutions of some nonlinear dispersive equations via deep learning. Phys. D Nonlinear Phenom. 2021, 428, 133037. [Google Scholar] [CrossRef]
- Zhou, Z.; Wang, L.; Yan, Z. Deep neural networks learning forward and inverse problems of two-dimensional nonlinear wave equations with rational solitons. Comput. Math. Appl. 2023, 151, 164–171. [Google Scholar] [CrossRef]
- Zhou, Z.J.; Yan, Z.Y. Solving forward and inverse problems of the logarithmic nonlinear Schrödinger equation with PT-symmetric harmonic potential via deep learning. Phys. Lett. A 2021, 387, 127010. [Google Scholar] [CrossRef]
- Li, J.; Li, B. Solving forward and inverse problems of the nonlinear Schrödinger equation with the generalized PT-symmetric Scarf-II potential via PINN deep learning. Commun. Theor. Phys. 2021, 73, 125001. [Google Scholar] [CrossRef]
- Zhou, Z.; Yan, Z. Deep learning neural networks for the third-order nonlinear Schrödinger equation: Solitons, breathers, and rogue waves. Commun. Theor. Phys. 2021, 73, 105006. [Google Scholar] [CrossRef]
- Zhou, Z.; Wang, L.; Weng, W.; Yan, Z. Data-driven discoveries of Bäcklund transforms and soliton evolution equations via deep neural networks learning. Phys. Lett. A 2022, 450, 128373. [Google Scholar] [CrossRef]
- Li, J.; Chen, J.; Li, B. Gradient-optimized physics-informed neural networks (GOPINNs): A deep learning method for solving the complex modified KdV equation. Nonlinear Dyn. 2022, 107, 781–792. [Google Scholar] [CrossRef]
- Tian, S.; Niu, Z.; Li, B. Mix-training physics-informed neural networks for high-order rogue waves of cmKdV equation. Nonlinear Dyn. 2023, 111, 16467–16482. [Google Scholar] [CrossRef]
- Yuan, W.-X.; Guo, R.; Gao, Y.-N. Physics-informed Neural Network method for the Modified Nonlinear Schrödinger equation. Optik 2023, 279, 170739. [Google Scholar] [CrossRef]
- Zhang, C.J.; Bai, Y.X. A Novel Method for Solving Nonlinear Schrödinger Equation with a Potential by Deep Learning. J. Appl. Math. Phys. 2022, 10, 3175–3190. [Google Scholar] [CrossRef]
- Zhang, R.; Jin Su, J.; Feng, J. Solution of the Hirota equation using a physics-informed neural network method with embedded conservation laws. Nonlinear Dyn. 2023, 111, 13399–13414. [Google Scholar] [CrossRef]
- Meiyazhagan, J.; Manikandan, K.; Sudharsan, J.B.; Senthilvelan, M. Data driven soliton solution of the nonlinear Schrödinger equation with certain PT-symmetric potentials via deep learning. Chaos 2022, 32, 053115. [Google Scholar] [CrossRef] [PubMed]
- Thulasidharan, K.; Vishnu Priya, N.; Monisha, S.; Senthilvelan, M. Predicting positon solutions of a family of nonlinear Schrödinger equations through deep learning algorithm. Phys. Lett. A 2024, 511, 129551. [Google Scholar] [CrossRef]
- Wang, X.; Han, W.; Wu, Z.; Yan, Z. Data-driven solitons dynamics and parameters discovery in the generalized nonlinear dispersive mKdV-type equation via deep neural networks learning. Nonlinear Dyn. 2024, 112, 7433–7458. [Google Scholar] [CrossRef]
- Tarkhov, D.; Lazovskaya, T.; Antonov, V. Adapting PINN Models of Physical Entities to Dynamical Data. Computation 2023, 11, 168. [Google Scholar] [CrossRef]
- Xu, S.-Y.; Zhou, Q.; Liu, W. Prediction of soliton evolution and equation parameters for NLS-MB equation based on the phPINN algorithm. Nonlinear Dyn. 2023, 111, 18401–18417. [Google Scholar] [CrossRef]
- Zhang, G.; Yang, H.; Pan, G.; Duan, Y.; Zhu, F.; Chen, Y. Constrained Self-Adaptive Physics-Informed Neural Networks with ResNet Block-Enhanced Network Architecture. Mathematics 2023, 11, 1109. [Google Scholar] [CrossRef]
- Xing, Z.; Cheng, H.; Cheng, J. Deep Learning Method Based on Physics-Informed Neural Network for 3D Anisotropic Steady-State Heat Conduction Problems. Mathematics 2023, 11, 4049. [Google Scholar] [CrossRef]
- Zhou, M.; Mei, G.; Xu, N. Enhancing Computational Accuracy in Surrogate Modeling for Elastic–Plastic Problems by Coupling S-FEM and Physics-Informed Deep Learning. Mathematics 2023, 11, 2016. [Google Scholar] [CrossRef]
- Faroughi, S.A.; Soltanmohammadi, R.; Datta, P.; Mahjour, S.K.; Faroughi, S. Physics-Informed Neural Networks with Periodic Activation Functions for Solute Transport in Heterogeneous Porous Media. Mathematics 2024, 12, 63. [Google Scholar] [CrossRef]
- Demir, K.T.; Logemann, K.; Greenberg, D.S. Closed-Boundary Reflections of Shallow Water Waves as an Open Challenge for Physics-Informed Neural Networks. Mathematics 2024, 12, 3315. [Google Scholar] [CrossRef]
- Ortiz Ortiz, R.D.; Martínez Núñez, O.; Marín Ramírez, A.M. Solving Viscous Burgers’ Equation: Hybrid Approach Combining Boundary Layer Theory and Physics-Informed Neural Networks. Mathematics 2024, 12, 3430. [Google Scholar] [CrossRef]
- Wang, B.; Guo, Z.; Liu, J.; Wang, Y.; Xiong, F. Geophysical Frequency Domain Electromagnetic Field Simulation Using Physics-Informed Neural Network. Mathematics 2024, 12, 3873. [Google Scholar] [CrossRef]
- Li, H.; Zhang, Y.; Wu, Z.; Wang, Z.; Wu, T. An Importance Sampling Method for Generating Optimal Interpolation Points in Training Physics-Informed Neural Networks. Mathematics 2025, 13, 150. [Google Scholar] [CrossRef]
- Liu, Y.; Chen, L.; Chen, Y.; Ding, J. An Adaptive Sampling Algorithm with Dynamic Iterative Probability Adjustment Incorporating Positional Information. Entropy 2024, 26, 451. [Google Scholar] [CrossRef]
- Moloshnikov, I.A.; Sboev, A.G.; Kutukov, A.A.; Rybka, R.B.; Kuvakin, M.S.; Fedorov, O.O.; Zavertyaev, S.V. Analysis of neural network methods for obtaining soliton solutions of the nonlinear Schrödinger equation. Chaos Solitons Fractals 2025, 192, 115. [Google Scholar] [CrossRef]
- Zabusky, N.J.; Kruskal, M.D. Interaction of “solitons” in a collisionless plasma and the recurrence of initial states. Phys. Rev. Lett. 1965, 15, 240–243. [Google Scholar] [CrossRef]
- Rebbi, C.; Soliani, G. Solitons and Particles; World Scientific: Singapore, 1984. [Google Scholar]
- Kovachev, L.M. Optical leptons. Int. J. Math. Sci. 2004, 27, 1403–1422. [Google Scholar] [CrossRef]
- Serkin, V.N.; Belyaeva, T.L. Well-dressed repulsive-core solitons and nonlinear optics of nuclear reactions. Opt. Commun. 2023, 549, 129831. [Google Scholar] [CrossRef]
- Belyaeva, T.L.; Serkin, V.N. Nonlinear-Optical Analogies in Nuclear-Like Soliton Reactions: Selection Rules, Nonlinear Tunneling and Sub-Barrier Fusion–Fission. Chin. Phys. Lett. 2024, 41, 080501. [Google Scholar] [CrossRef]
- Gardner, C.S.; Greene, J.M.; Kruskal, M.D.; Miura, R.M. Method for Solving the Korteweg-deVries Equation. Phys. Rev. Lett. 1967, 19, 1095–1097. [Google Scholar] [CrossRef]
- Lax, P.D. Integrals of nonlinear equations of evolution and solitary waves. Comm. Pure Appl. Math. 1968, 21, 467–490. [Google Scholar] [CrossRef]
- Zakharov, V.E.; Shabat, A.B. Exact Theory of Two-dimensional Self-focusing and One-dimensional Self-modulation of Waves in Nonlinear Media. Sov. Phys. JETP 1972, 34, 62–69. [Google Scholar]
- Hirota, R. Exact envelope-soliton solutions of a nonlinear wave equation. J. Math. Phys. 1973, 14, 805–809. [Google Scholar] [CrossRef]
- Ablowitz, M.J.; Kaup, D.J.; Newell, A.C.; Segur, H. Nonlinear evolution equations of physical significance. Phys. Rev. Lett. 1972, 31, 125–127. [Google Scholar] [CrossRef]
- Ablowitz, M.J.; Clarkson, P.A. Solitons, Nonlinear Evolution Equations and Inverse Scattering; Cambridge University Press: Cambridge, UK, 1991. [Google Scholar]
- Chen, H.H.; Liu, C.S. Solitons in nonuniform media. Phys. Rev. Lett. 1976, 37, 693. [Google Scholar] [CrossRef]
- Hirota, R.; Satsuma, J. N-soliton solutions of the K-dV equation with loss and nonuniformity terms. J. Phys. Soc. Jpn. Lett. 1976, 41, 2141. [Google Scholar] [CrossRef]
- Calogero, F.; Degasperis, A. Coupled nonlinear evolution equations solvable via the inverse spectral transform, and solitons that come back: The boomeron. Lett. Nuovo Cimento 1976, 16, 425. [Google Scholar] [CrossRef]
- Serkin, V.N.; Hasegawa, A. Novel soliton solutions of the nonlinear Schrödinger equation model. Phys. Rev. Lett. 2000, 85, 4502–4505. [Google Scholar] [CrossRef]
- Serkin, V.N.; Hasegawa, A. Exactly integrable nonlinear Schrödinger equation models with varying dispersion, nonlinearity and gain: Application for soliton dispersion and nonlinear management. IEEE J. Select. Top. Quant. Electron. 2002, 8, 418–431. [Google Scholar] [CrossRef]
- Serkin, V.N.; Hasegawa, A.; Belyaeva, T.L. Nonautonomous solitons in external potentials. Phys. Rev. Lett. 2007, 98, 074102. [Google Scholar] [CrossRef] [PubMed]
- Han, K.H.; Shin, H.J. Nonautonomous integrable nonlinear Schrödinger equations with generalized external potentials. J. Phys. A Math. Theor. 2009, 42, 335202. [Google Scholar] [CrossRef]
- Luo, H.; Zhao, D.; He, X. Exactly controllable transmission of nonautonomous optical solitons. Phys. Rev. A 2009, 79, 063802. [Google Scholar] [CrossRef]
- Serkin, V.N.; Hasegawa, A.; Belyaeva, T.L. Hidden symmetry reductions and the Ablowitz-Kaup-Newell-Segur hierarchies for nonautonomous solitons. In Odyssey of Light in Nonlinear Optical Fibers: Theory and Applications; Porsezian, K., Ganapathy, R., Eds.; CRC Press: Boca Raton, FL, USA; Taylor & Francis: Abingdon, UK, 2015; pp. 145–187. [Google Scholar]
- Xu, B.; Zhang, S. Analytical Method for Generalized Nonlinear Schrödinger Equation with Time-Varying Coefficients: Lax Representation, Riemann-Hilbert Problem Solutions. Mathematics 2022, 10, 1043. [Google Scholar] [CrossRef]
- Kodama, Y.; Hasegawa, A. Nonlinear pulse propagation in a monomode dielectric guide. IEEE J. Quantum Electron. 1987, 23, 510–515. [Google Scholar] [CrossRef]
- Agrawal, G.P. Nonlinear Fiber Optics, 1st ed.; Academic Press: Cambridge, MA, USA, 1989. [Google Scholar]
- Serkin, V.N.; Hasegawa, A.; Belyaeva, T.L. Solitary waves in nonautonomous nonlinear and dispersive systems: Nonautonomous solitons. J. Mod. Opt. 2010, 57, 1456–1472. [Google Scholar] [CrossRef]
- Guo, R.; Hao, H.-Q. Breathers and multi-soliton solutions for the higher-order generalized nonlinear Schrödinger equation. Commun. Nonlinear Sci. Numer. Simulat. 2013, 18, 2426–2435. [Google Scholar] [CrossRef]
- Chowdury, A.; Krolikowski, W.; Akhmediev, N. Breather solutions of a fourth-order nonlinear Schrödinger equation in the degenerate, soliton, and rogue wave limits. Phys. Rev. E 2017, 96, 042209. [Google Scholar] [CrossRef]
- Chowdury, A.; Kedziora, D.J.; Ankiewicz, A.; Akhmediev, N. Soliton solutions of an integrable nonlinear Schrödinger equation with quintic terms. Phys. Rev. E 2014, 90, 032922. [Google Scholar] [CrossRef]
- Su, J.J.; Gao, Y.T.; Jia, S.L. Solitons for a generalized sixth-order variable-coefficient nonlinear Schrödinger equation for the attosecond pulses in an optical fiber. Commun. Nonlinear Sci. Numer. Simulat. 2013, 18, 2426–2435. [Google Scholar] [CrossRef]
- Huang, Y.-H.; Guo, R. Breathers for the sixth-order nonlinear Schrödinger equation on the plane wave and periodic wave background. Phys. Fluids 2024, 36, 045107. [Google Scholar] [CrossRef]
- Zinner, N.T.; Thøgersen, M. Stability of a Bose-Einstein condensate with higher-order interactions near a Feshbach resonance. Phys. Rev. A 2009, 80, 023607. [Google Scholar] [CrossRef]
- Nkenfack, C.E.; Lekeufack, O.T.; Yamapi, R.; Kengne, E. Bright solitons and interaction in the higher-order Gross-Pitaevskii equation investigated with Hirota’s bilinear method. Phys. Lett. A 2024, 511, 129563. [Google Scholar] [CrossRef]
- Porsezian, K.; Daniel, M.; Lakshmanan, M. On the integrability aspects of the one-dimensional classical continuum isotropic Heisenberg spin chain. J. Math. Phys. 1992, 33, 1807–1816. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, Y.; Tang, X. Breathers and rogue waves for the fourth-order nonlinear Schrödinger equation. Z. Naturforsch. A 2017, 72, 339–344. [Google Scholar] [CrossRef]
- Serkin, V.N.; Belyaeva, T.L. Novel soliton breathers for the higher-order Ablowitz-Kaup-Newell-Segur hierarchy. Optik 2018, 174, 259–265. [Google Scholar] [CrossRef]
- Serkin, V.N.; Belyaeva, T.L. Optimal control for soliton breathers of the Lakshmanan-Porsezian-Daniel, Hirota, and cmKdV models. Optik 2018, 175, 17–27. [Google Scholar] [CrossRef]
- Tian, M.W.; Zhou, T.-Y. Darboux transformation, generalized Darboux transformation and vector breathers for a matrix Lakshmanan-Porsezian-Daniel equation in a Heisenberg ferromagnetic spin chain. Chaos Solitons Fractals 2021, 152, 111411. [Google Scholar]
- Guo, B.; Tian, L.; Yan, Z.; Ling, L.; Wang, Y.-F. Rogue Waves. Mathematical Theory and Applications in Physics; Walter de Gruyter GmbH: Berlin, Germany; Boston, MA, USA, 2017. [Google Scholar]
- Ankiewicz, A.; Soto-Crespo, J.M.; Akhmediev, N. Rogue waves and rational solutions of the Hirota equation. Phys. Rev. E 2010, 81, 046602. [Google Scholar] [CrossRef]
- Bludov, Y.V.; Konotop, V.V.; Akhmediev, N. Matter rogue waves. Phys. Rev. A 2009, 80, 033610. [Google Scholar] [CrossRef]
- Li, C.; He, J.; Porsezian, K. Rogue waves of the Hirota and the Maxwell-Bloch equations. Phys. Rev. E 2013, 87, 012913. [Google Scholar] [CrossRef] [PubMed]
- Yan, Z.Y.; Dai, C.Q. Optical rogue waves in the generalized inhomogeneous higher-order nonlinear Schrödinger equation with modulating coefficients. J. Opt. 2013, 15, 064012. [Google Scholar] [CrossRef]
- Zhang, H.Q.; Chen, J. Rogue wave solutions for the higher-order nonlinear Schrödinger equation with variable coefficients by generalized Darboux transformation. Mod. Phys. Lett. B 2016, 30, 1650106. [Google Scholar] [CrossRef]
- Serkin, V.N.; Belyaeva, T.L. Exactly integrable nonisospectral models for femtosecond colored solitons and their reversible transformations. Optik 2018, 158, 1289–1294. [Google Scholar] [CrossRef]
- Nandy, S.; Saharia, G.K.; Talukdar, S.; Dutta, R.; Mahanta, R. Even and odd nonautonomous NLSE hierarchy and reversible transformations. Optik 2021, 247, 167928. [Google Scholar] [CrossRef]
- Wadati, M. The Modified Korteweg-de Vries Equation. J. Phys. Soc. Jpn. 1973, 34, 1289. [Google Scholar] [CrossRef]
- Hirota, R. The Direct Method in Soliton Theory; Springer: Berlin/Heidelberg, Germany, 1980. [Google Scholar]
- Chen, H.H. General derivation of Bäcklund transformations from inverse scattering problems. Phys. Rev. Lett. 1974, 33, 925. [Google Scholar] [CrossRef]
- Konno, K.; Wadati, M. Simple derivation of Backlund transformation from Riccati form of inverse method. Prog. Theor. Phys. 1975, 53, 1652–1656. [Google Scholar] [CrossRef]
- Rangwala, A.A.; Rao, J.A. Complete soliton solutions of the ZS/AKNS equations of the inverse scattering method. Phys. Lett. A 1985, 112, 188–192. [Google Scholar] [CrossRef]
- Matveev, V.B.; Salle, M.A. Dardoux Transformations and Solitons, Springer Series in Nonlinear Dynamics; Springer: Berlin/Heidelberg, Germany, 1991. [Google Scholar]
- Wazwaz, A.M. Partial Differential Equations and Solitary Waves Theory; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- He, J.-H. Variational iteration method—A kind of non-linear analytical technique: Some examples. Intern. J. Non-Linear Mech. 1999, 34, 699–708. [Google Scholar] [CrossRef]
- Karpman, V.I.; Maslov, E.M. Perturbation theory for solitons. Sov. Phys. JETP 1977, 46, 281–291. [Google Scholar]
- Karpman, V.I.; Solov’ev, V.V. A perturbation approach to the two-soliton system. Physica D 1981, 3, 487–502. [Google Scholar] [CrossRef]
- Kim, D.; Lee, J. A Review of Physics Informed Neural Networks for Multiscale Analysis and Inverse Problems. Multiscale Sci. Eng. 2024, 6, 1–11. [Google Scholar] [CrossRef]
- Toscano, J.D.; Oommen, V.; Varghese, A.J.; Zoua, Z.; Daryakenarib, N.A.; Wub, C.; Karniadakis, G.E. From PINNs to PIKANs: Recent advances in physics-informed machine learning. Mach. Learn. Comput. Sci. Eng. 2025, 1, 15. [Google Scholar] [CrossRef]
- Lagaris, I.E.; Likas, A.; Fotiadis, D.I. Artificial neural networks for solving ordinary and partial differential equations. IEEE Trans. Neural Netw. 1998, 9, 987–1000. [Google Scholar] [CrossRef]
- Raissi, M.; Perdikaris, P.; Karniadakis, G.E. Machine learning of linear differential equations using Gaussian processes. J. Comput. Phys. 2017, 348, 683–693. [Google Scholar] [CrossRef]
- Rudy, S.H.; Brunton, S.L.; Proctor, J.L.; Kutz, J.N. Data-driven discovery of partial differential equations. Sci. Adv. 2017, 3, e1602614. [Google Scholar] [CrossRef]
- Raissi, M.; Karniadakis, G.E. Hidden physics models: Machine learning of nonlinear partial differential equations. J. Computat. Phys. 2018, 357, 125–141. [Google Scholar] [CrossRef]
- Baydin, A.G.; Pearlmutter, B.A.; Radul, A.A.; Siskind, J.M. Automatic Differentiation in Machine Learning: A Survey. J. Mach. Learn. Res. 2018, 18, 1–43. [Google Scholar]
- McKay, M.D.; Beckman, R.J.; Conover, W. Comparison of Three Methods for Selecting Values of Input Variables in the Analysis of Output from a Computer Code. Technometrics 1979, 21, 239–245. [Google Scholar]
- Stein, M. Large sample properties of simulations using Latin hypercube sampling. Technometrics 1987, 29, 143–151. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization. arXiv 2017, arXiv:1412.6980v9. [Google Scholar]
- Liu, D.C.; Nocedal, J. On the limited memory BFGS method for large scale optimization. Math. Program. 1989, 45, 503–528. [Google Scholar] [CrossRef]
- Abadi, M.; Agarwal, A.; Barham, P.; Brevdo, E.; Chen, Z.; Citro, C. Tensorflow: Large-scale machine learning on heterogeneous distributed systems. arXiv 2016, arXiv:1603.04467. [Google Scholar]
- Satsuma, J.; Yajima, N. Initial value problems of one-dimensional self-modulation of nonlinear waves in dispersive media. Prog. Theor. Phys. Suppl. 1974, 55, 284–306. [Google Scholar] [CrossRef]
- Wang, S.; Yu, X.; Perdikaris, P. When and why PINNs fail to train: A neural tangent kernel perspective. J. Comput. Phys. 2022, 449, 110768. [Google Scholar] [CrossRef]
- Li, N.; Wang, M. Data-driven localized waves of a nonlinear partial differential equation via transformation and physics-informed neural network. Nonlinear Dyn. 2025, 113, 2559–2568. [Google Scholar] [CrossRef]
- Huijuan, Z. Parallel Physics-Informed Neural Networks Method with Regularization Strategies for the Forward-Inverse Problems of the Variable Coefficient Modified KdV Equation. J. Syst. Sci. Complex 2024, 37, 511–544. [Google Scholar]
- Zhao, N.; Chen, Y.; Cheng, L.; Chen, J. Data-driven soliton solutions and parameter identification of the nonlocal nonlinear Schrödinger equation using the physics-informed neural network algorithm with parameter regularization. Nonlinear Dyn. 2025, 113, 8801–8817. [Google Scholar] [CrossRef]
- Farea, A.; Yli-Harja, O.; Emmert-Streib, F. Understanding Physics-Informed Neural Networks: Techniques, Applications, Trends, and Challenges. AI 2024, 5, 1534–1557. [Google Scholar] [CrossRef]
- Zhao, C.; Zhang, F.; Lou, W.; Wang, X.; Yang, J. A comprehensive review of advances in physics-informed neural networks and their applications in complex fluid dynamics. Phys. Fluids 2024, 36, 101301. [Google Scholar] [CrossRef]
- Markidis, S. The Old and the New: Can Physics-Informed Deep-Learning Replace Traditional Linear Solvers? Front. Big Data 2021, 4, 669097. [Google Scholar] [CrossRef] [PubMed]
- Savović, S.; Ivanović, M.; Min, R. A Comparative Study of the Explicit Finite Difference Method and Physics-Informed Neural Networks for Solving the Burgers’ Equation. Axioms 2023, 12, 982. [Google Scholar] [CrossRef]
- Grossmann, T.G.; Komorowska, U.J.; Latz, J.; Schönlieb, C.-B. Can physics-informed neural networks beat the finite element method? IMA J. Appl. Math. 2024, 89, 143–174. [Google Scholar] [CrossRef]
- Sikora, M.; Krukowski, P.; Paszyńska, A.; Paszyński, M. Comparison of Physics Informed Neural Networks and Finite Element Method Solvers for advection-dominated diffusion problems. J. Comput. Sci. 2024, 81, 102340. [Google Scholar] [CrossRef]
- Ortiz Ortiz, R.D.; Marín Ramírez, A.M.; Ortiz Marín, M.A. Physics-Informed Neural Networks and Fourier Methods for the Generalized Korteweg–de Vries Equation. Mathematics 2025, 13), 1521. [Google Scholar] [CrossRef]
- Sanchez Lopez, Z.; Diaz Cortes, G.B. Optimizing a Physics-Informed Neural Network to solve the Reynolds Equation. Rev. Mex. Fis. 2025, 71, 020601. [Google Scholar]
- Crank, J.; Nicolson, P. A practical method for numerical evaluation of solutions of partial differential equations of the heatconduction type. In Mathematical Proceedings of the Cambridge Philosophical Society; Cambridge University Press: Cambridge, UK, 1947. [Google Scholar]
- Jagtap, A.; Kawaguchi, K.; Karniadakis, G.E. Adaptive activation functions accelerate convergence in deep and physics-informed neural networks. J. Comput. Phys. 2020, 404, 109136. [Google Scholar] [CrossRef]
- Wang, X.; Wua, Z.; Song, J.; Han, W.; Yan, Z. Data-driven soliton solutions and parameters discovery of the coupled nonlinear wave equations via a deep learning method. Chaos Solitons Fractals 2024, 180, 114509. [Google Scholar] [CrossRef]
- Pang, G.; Lu, L.; Karniadakis, G.E. fPINNs: Fractional physics-informed neural networks. SIAM J. Sci. Comput. 2019, 41, 4. [Google Scholar] [CrossRef]
- Nabian, M.A.; Gladstone, R.J.; Meidani, H. Efficient training of physics-informed neural networks via importance sampling. Comput. Aided Civ. Inf. 2021, 36, 962–977. [Google Scholar] [CrossRef]
- Guo, H.; Zhuang, X.; Chen, P.; Alajlan, N.; Rabczuk, T. Analysis of three-dimensional potential problems in non-homogeneous media with physics-informed deep collocation method using material transfer learning and sensitivity analysis. Eng. Comput. 2022, 38, 5423–5444. [Google Scholar] [CrossRef]
- Wu, C.; Zhu, M.; Tan, Q.; Kartha, Y.; Lu, L. A comprehensive study of non-adaptive and residual-based adaptive sampling for physics-informed neural networks. Comput. Methods Appl. Mech. Eng. 2023, 403 Pt A, 115671. [Google Scholar] [CrossRef]
- Sobol’, I.M. On the distribution of points in a cube and the approximate evaluation of integrals. USSR Comput. Math. Phys. 1967, 7, 86–112. [Google Scholar] [CrossRef]
- Krishnapriyan, A.S.; Gholami, A.; Zhe, S.; Kirby, R.; Mahoney, M.W. Characterizing possible failure modes in physics-informed neural networks. Adv. Neural Inf. Process. Syst. 2021, 34, 1–13. [Google Scholar]
- Mattey, R.; Ghosh, S. A novel sequential method to train physics-informed neural networks for Allen–Cahn and Cahn–Hilliard equations. Comput. Methods Appl. Mech. Eng. 2022, 390, 114474. [Google Scholar] [CrossRef]
- Chen, Z.; Lai, S.-K.; Yang, Z. AT-PINN: Advanced time-marching physics-informed neural network for structural vibration analysis. Thin-Walled Struct. 2024, 196, 111423. [Google Scholar] [CrossRef]
- Wang, S.; Sankaran, S.; Perdikaris, P. Respecting causality for training physics-informed neural networks. Comput. Methods Appl. Mech. Eng. 2024, 421, 116813. [Google Scholar] [CrossRef]
- Moseley, B.; Markham, A.; Nissen-Meyer, T. Finite basis physics-informed neural networks (FBPINNs): A scalable domain decomposition approach for solving differential equations. Adv. Comput. Math. 2023, 49, 62. [Google Scholar] [CrossRef]
- Yang, L.; Meng, X.; Karniadakis, G.E. B-PINNs: Bayesian physics-informed neural networks for forward and inverse PDE problems with noisy data. J. Comput. Phys. 2021, 425, 109913. [Google Scholar] [CrossRef]
- Knuth, D.E. The Art of Computer Programming, 3rd ed.; Addison-Wesley Professional: Reading, MA, USA, 1997; Volume 1: Fundamental Algorithms. [Google Scholar]
- Knuth, D.E. Computer programming as an art. In 1974 ACM Turing Award Lecture; Communications of the ACM; Association for Computing Machinery: New York, NY, USA, 1974; Volume 17, p. 667. [Google Scholar] [CrossRef]
- Russell, B. Mysticism and Logic; Dover Publications: Mineola, NY, USA, 1918. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Function | Expression | Derivative | Relative Error |
|---|---|---|---|
| Sigmoid | |||
| ReLU | |||
| Sech | |||
| Tanh | |||
| Cos |
| Neurons | Hidden Layers | |||
|---|---|---|---|---|
| 2 | 4 | 6 | 8 | |
| 10 | ||||
| 20 | ||||
| 40 | ||||
| 60 | ||||
| 80 | ||||
| Initial/Boundary Points, | Collocation Points, | |||
|---|---|---|---|---|
| 5000 | 10,000 | 15,000 | 20,000 | |
| 60 | ||||
| 90 | ||||
| 120 | ||||
| 150 | ||||
| 180 | ||||
| 240 | ||||
| 300 | ||||
| Sampling Method | Collocation Points, | |
|---|---|---|
| 5000 | 20,000 | |
| Grid | ||
| Random | ||
| LHS | ||
| Sobol | ||
| PDE and Type of Solution | Layers × Neurons | Rel. Error | |
|---|---|---|---|
| NLS; Equation (23), 2-sol. bound state | 300 | ||
| NLS; Equation (23), 2-sol. interaction | 300 | ||
| NLS + linear potential; Equation (24), 1-sol. | 150 | ||
| cmKdV; Equation (28), 2-sol. bound state | 300 | ||
| Hirota; Equation (29), 2-sol. interaction | 150 | ||
| Fourth-order NLS; Equation (7), 2-sol. interaction | 150 | ||
| Fifth-order NLS; Equation (7), 2-sol. interaction | 150 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Serkin, L.; Belyaeva, T.L. Physics-Informed Neural Networks for Higher-Order Nonlinear Schrödinger Equations: Soliton Dynamics in External Potentials. Mathematics 2025, 13, 1882. https://doi.org/10.3390/math13111882
Serkin L, Belyaeva TL. Physics-Informed Neural Networks for Higher-Order Nonlinear Schrödinger Equations: Soliton Dynamics in External Potentials. Mathematics. 2025; 13(11):1882. https://doi.org/10.3390/math13111882
Chicago/Turabian StyleSerkin, Leonid, and Tatyana L. Belyaeva. 2025. "Physics-Informed Neural Networks for Higher-Order Nonlinear Schrödinger Equations: Soliton Dynamics in External Potentials" Mathematics 13, no. 11: 1882. https://doi.org/10.3390/math13111882
APA StyleSerkin, L., & Belyaeva, T. L. (2025). Physics-Informed Neural Networks for Higher-Order Nonlinear Schrödinger Equations: Soliton Dynamics in External Potentials. Mathematics, 13(11), 1882. https://doi.org/10.3390/math13111882