
Complex, Temporally Variant SVD via Real ZN Method and 11-Point ZeaD Formula from Theoretics to Experiments


Abstract
1. Introduction
- The complex, temporally variant SVD problem is formulated and studied in this paper for the first time.
- A new 11-point ZeaD formula with precision is proposed and investigated.
- A new CTSVD model and five DTSVD algorithms are derived, with experiments described and theoretics verified.
2. Problem Formulation and Preparation
3. Dynamical Model and Algorithms
3.1. CTSVD Model and Theoretical Analyses
3.2. DTSVD Algorithms and Theoretical Analyses
3.2.1. 11-Point and Other ZeaD Formulas
3.2.2. DTSVD Algorithms
| Pseudocode of DTSVD-5 (28) algorithm. |
| Input: and |
| 1: Set task duration , sampling gap , design parameter , step-size , |
| generate random initial value and . |
| 2: For |
| 3: Compute , , , and . |
| 4: If |
| 5: Compute via Euler backward formula. |
| 6: else |
| 7: Compute via (28). |
| 8: End |
| Output: , , , , and . |
4. Numerical Experiments
4.1. Example Description
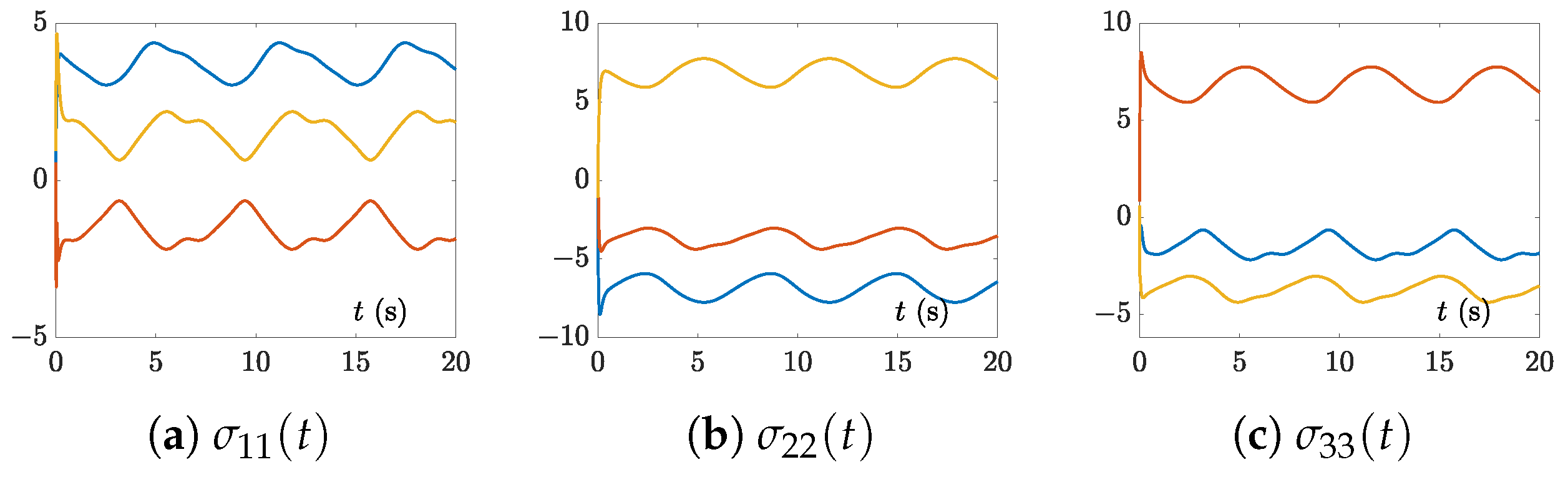
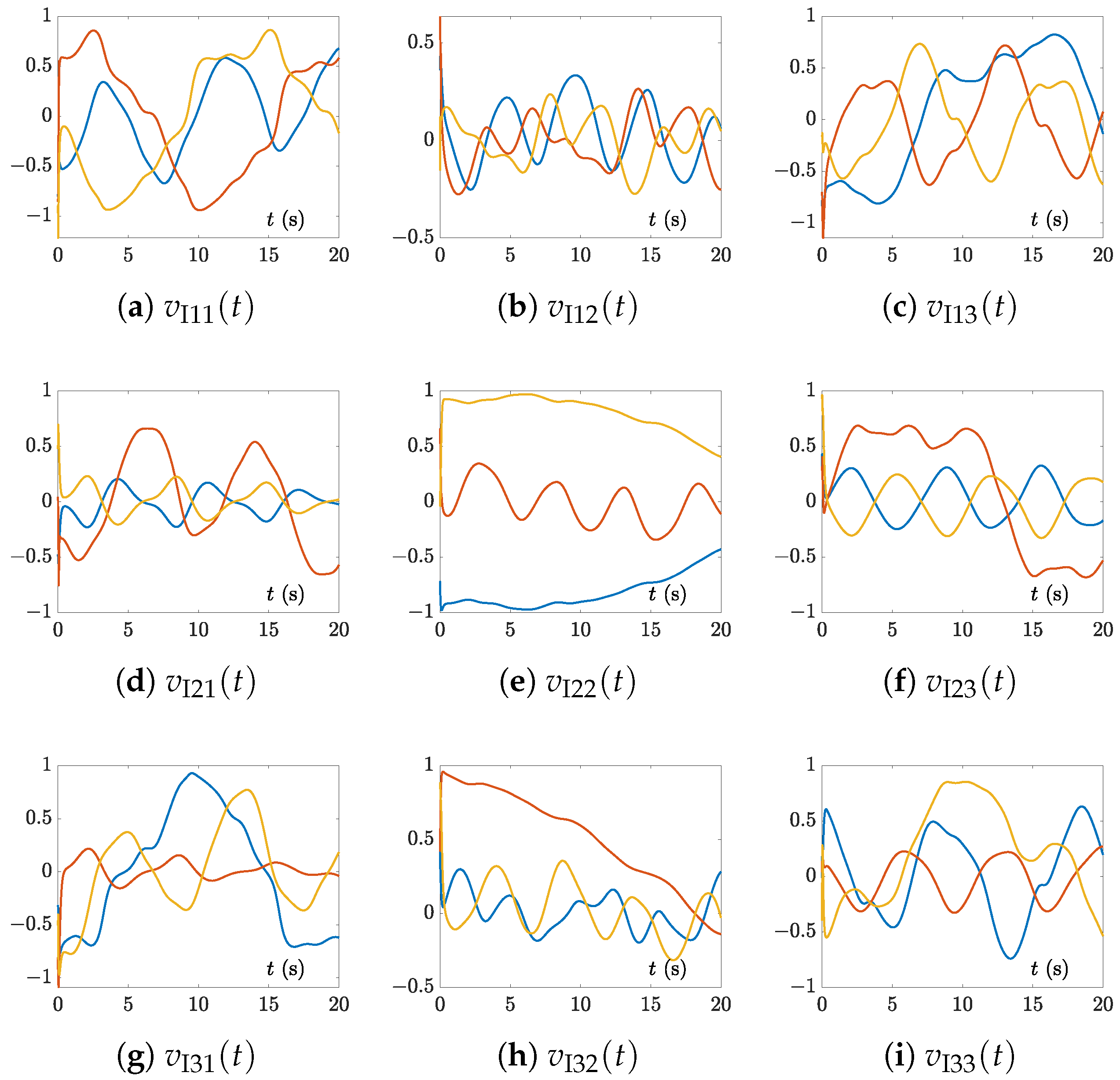
4.2. Experimental Results of the CTSVD Model
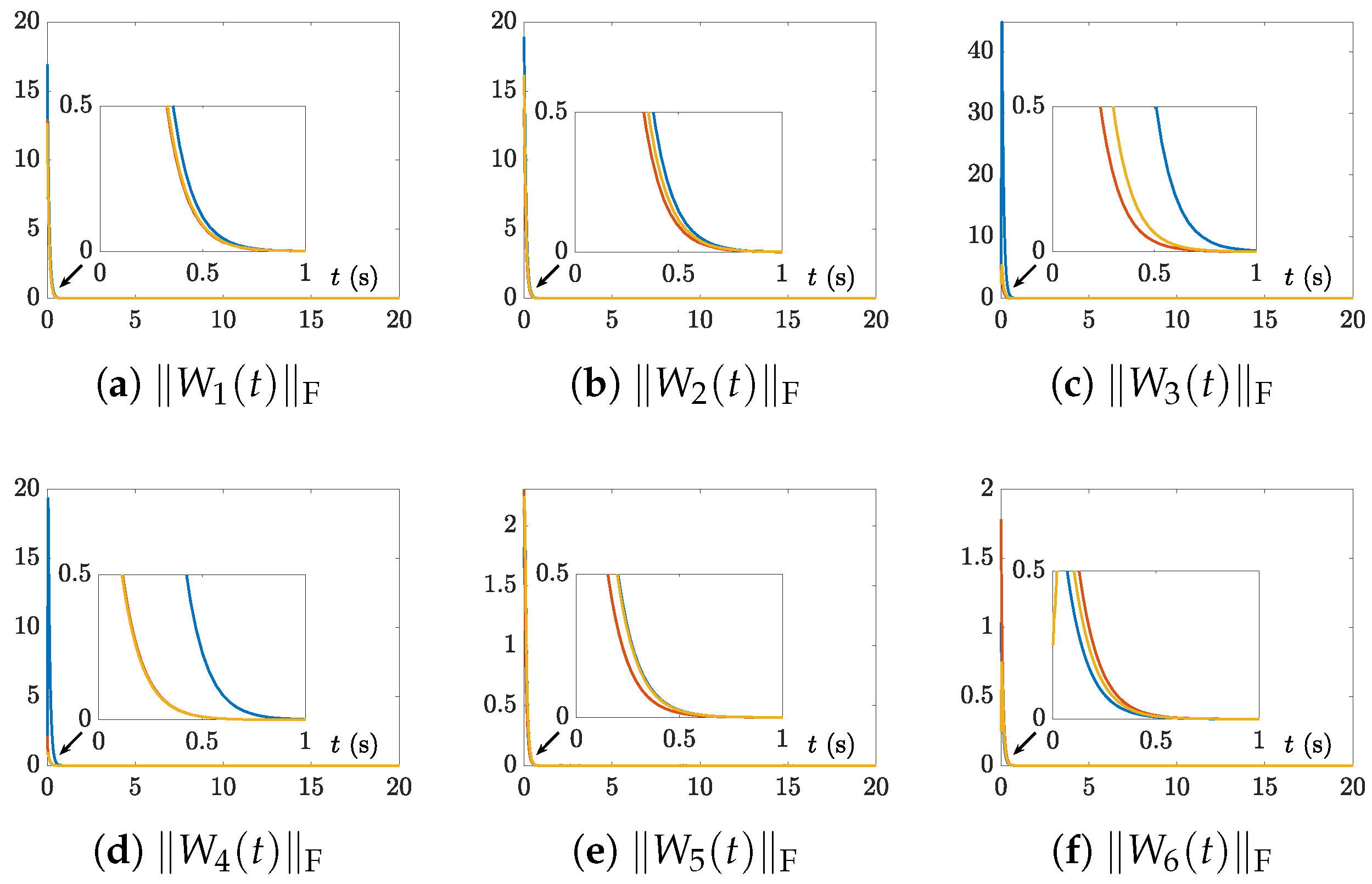
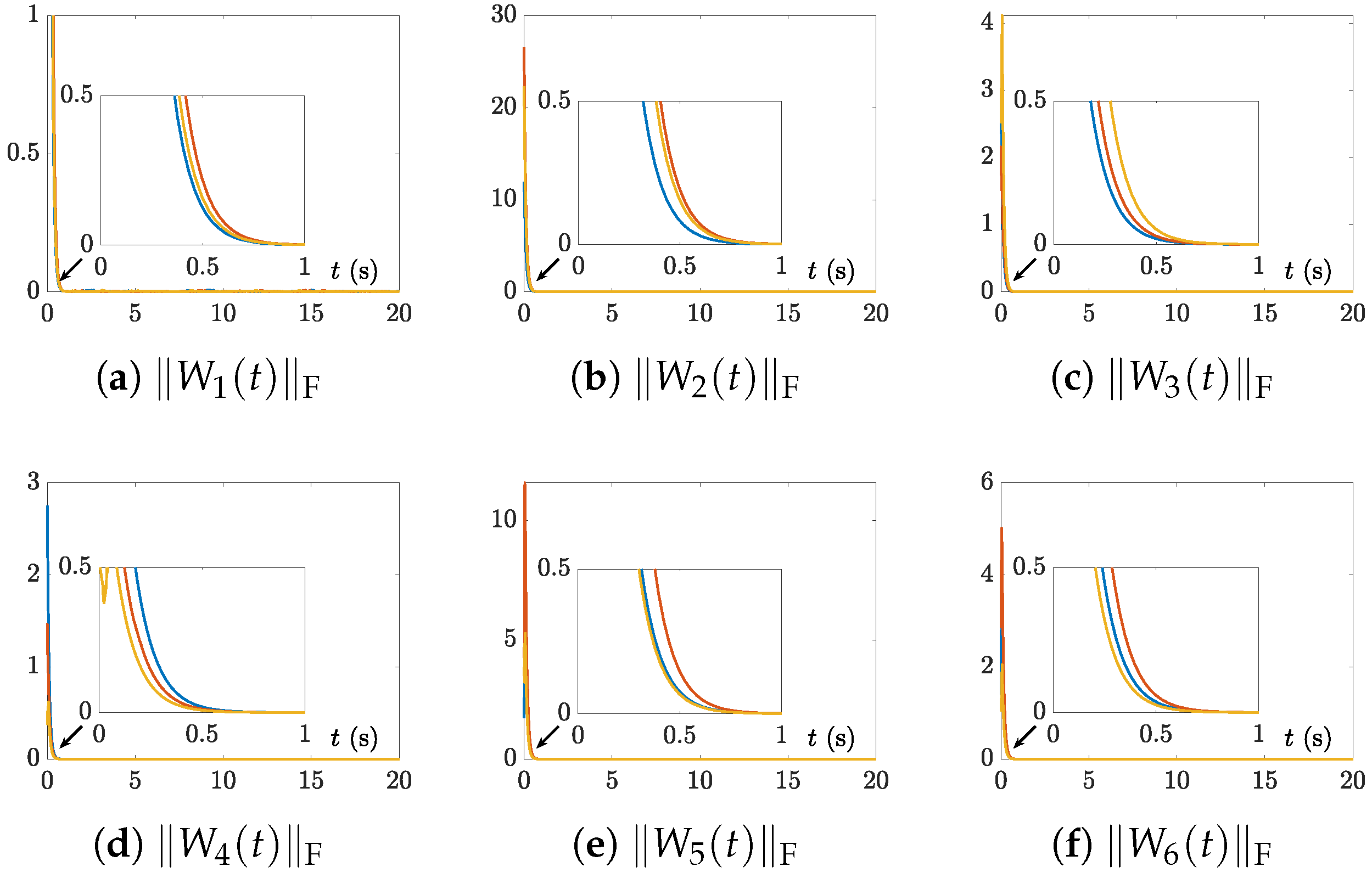
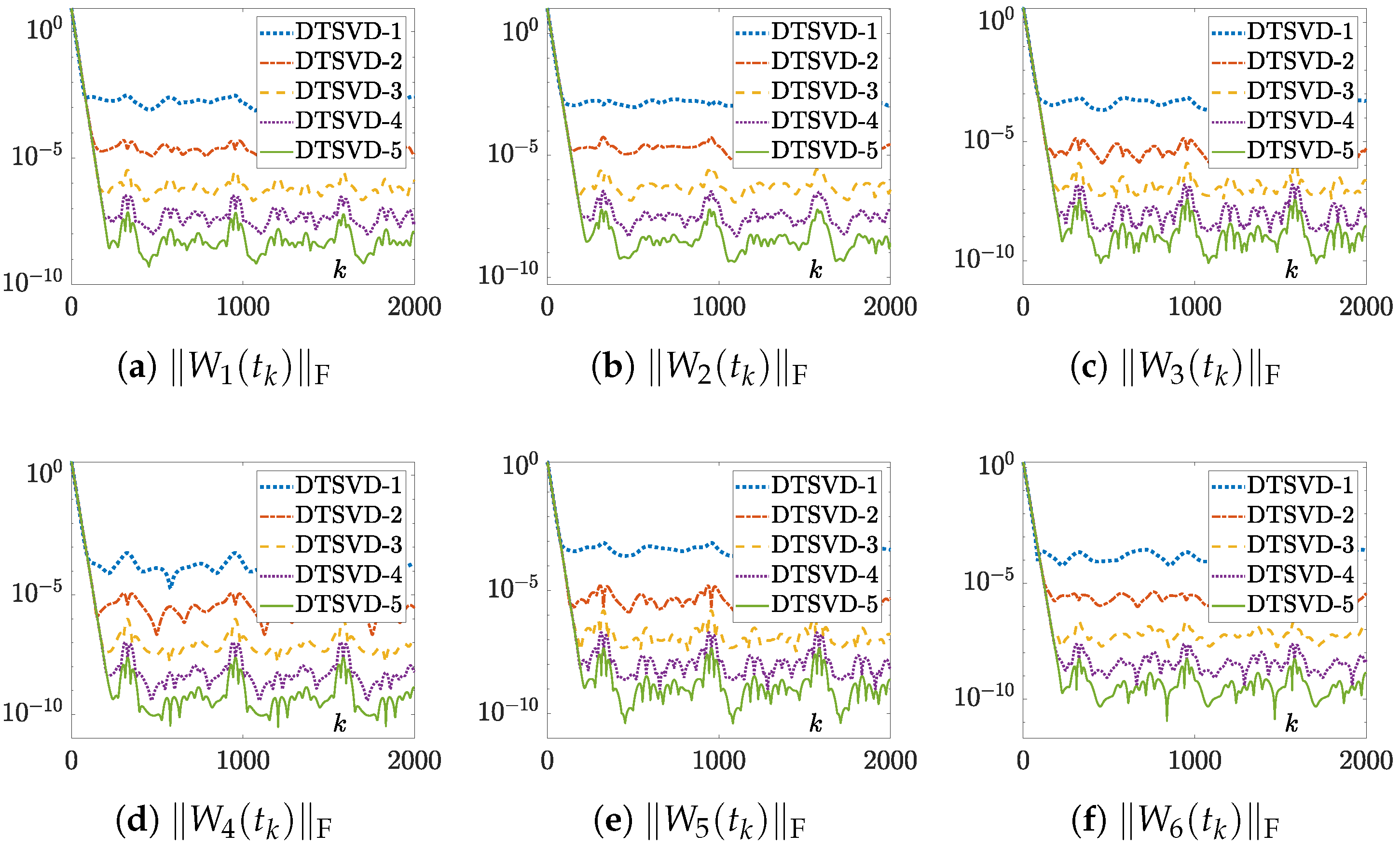
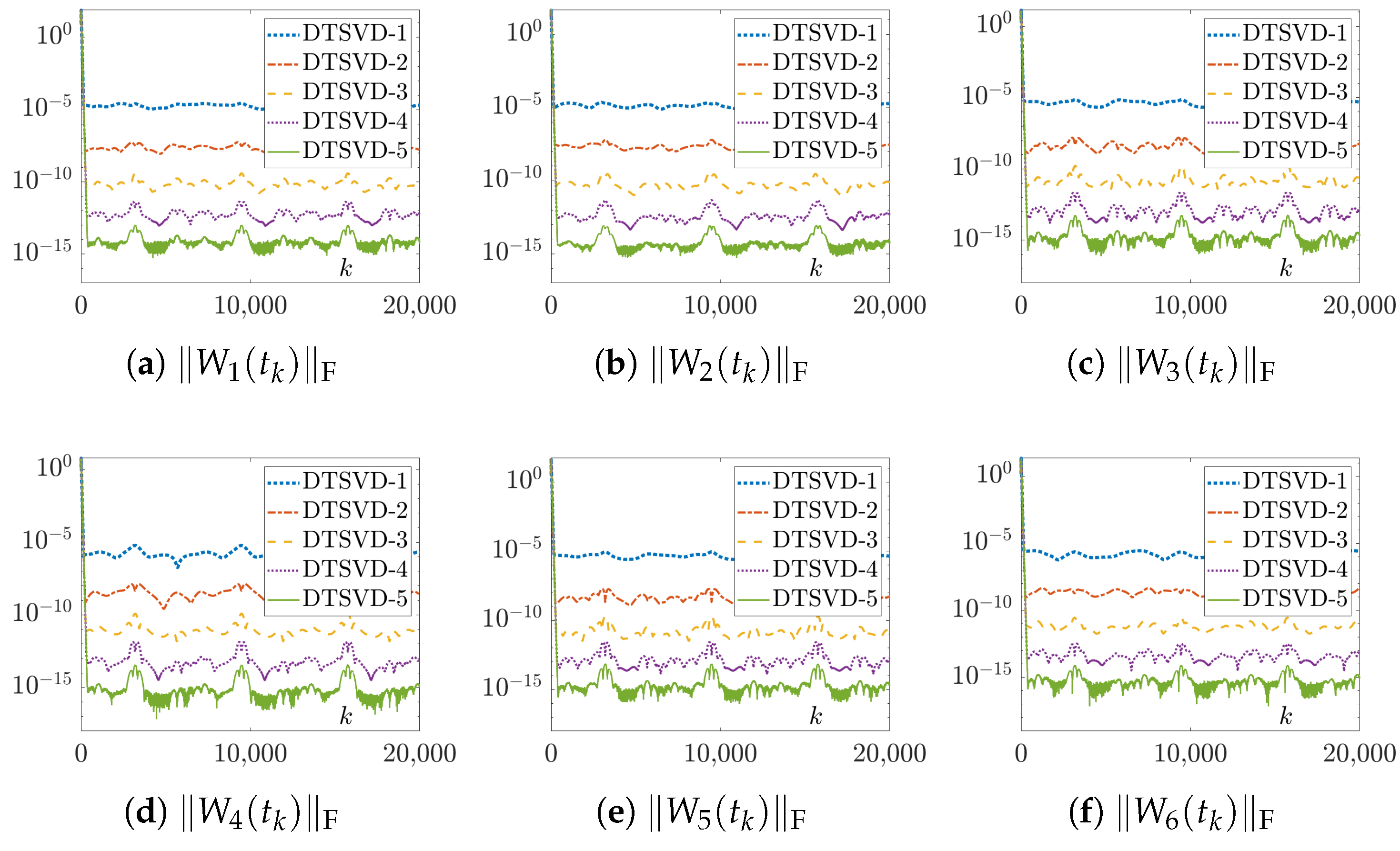
4.3. Experimental Results of DTSVD Algorithms
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| SVD | Singular value decomposition |
| ZN | Zeroing neurodynamics |
| CTSVD | Continuous-time SVD |
| ZeaD | Zhang et al. discretization |
| DTSVD | Discrete-time SVD |
| ODE | Ordinary differential equation |
Appendix A
References
- Ye, C.; Tan, S.; Wang, J.; Shi, L.; Zuo, Q.; Xiong, B. Double security level protection based on chaotic maps and SVD for medical images. Mathematics 2025, 13, 182. [Google Scholar] [CrossRef]
- Saifudin, I.; Widiyaningtyas, T.; Zaeni, I.; Aminuddin, A. SVD-GoRank: Recommender system algorithm using SVD and Gower’s ranking. IEEE Access 2025, 13, 19796–19827. [Google Scholar] [CrossRef]
- Tsyganov, A.; Tsyganova, Y. SVD-based parameter identification of discrete-time stochastic systems with unknown exogenous inputs. Mathematics 2024, 12, 1006. [Google Scholar] [CrossRef]
- Xie, Z.; Sun, J.; Tang, Y.; Tang, X.; Simpson, O.; Sun, Y. A k-SVD based compressive sensing method for visual chaotic image encryption. Mathematics 2023, 11, 1658. [Google Scholar] [CrossRef]
- Xue, Y.; Mu, K.; Wang, Y.; Chen, Y.; Zhong, P.; Wen, J. Robust speech steganography using differential SVD. IEEE Access 2019, 7, 153724–153733. [Google Scholar] [CrossRef]
- Wang, B.; Ding, C. An adaptive signal denoising method based on reweighted SVD for the fault diagnosis of rolling bearings. Sensors 2025, 25, 2470. [Google Scholar] [CrossRef]
- Baumann, M.; Helmke, U. Singular value decomposition of time-varying matrices. Future Gen. Comput. Syst. 2003, 19, 353–361. [Google Scholar] [CrossRef]
- Chen, J.; Zhang, Y. Online singular value decomposition of time-varying matrix via zeroing neural dynamics. Neurocomputing 2020, 383, 314–323. [Google Scholar] [CrossRef]
- Huang, M.; Zhang, Y. Zhang neuro-PID control for generalized bi-variable function projective synchronization of nonautonomous nonlinear systems with various perturbations. Mathematics 2024, 12, 2715. [Google Scholar] [CrossRef]
- Uhlig, F. Zhang neural networks: An introduction to predictive computations for discretized time-varying matrix problems. Numer. Math. 2024, 156, 691–739. [Google Scholar] [CrossRef]
- Guo, P.; Zhang, Y.; Li, S. Reciprocal-kind Zhang neurodynamics method for temporal-dependent Sylvester equation and robot manipulator motion planning. IEEE Trans. Neural Netw. Learn. Syst. 2025, 1–15. [Google Scholar] [CrossRef] [PubMed]
- Jerbi, H.; Alshammari, O.; Ben, A.; Kchaou, M.; Simos, T.; Mourtas, S.; Katsikis, V. Hermitian solutions of the quaternion algebraic Riccati equations through zeroing neural networks with application to quadrotor control. Mathematics 2024, 12, 15. [Google Scholar] [CrossRef]
- Jin, L.; Zhang, G.; Wang, Y.; Li, S. RNN-based quadratic programming scheme for tennis-training robots with flexible capabilities. IEEE Trans. Syst. Man Cybern. 2023, 53, 838–847. [Google Scholar] [CrossRef]
- Yang, Y.; Li, X.; Wang, X.; Liu, M.; Yin, J.; Li, W.; Voyles, R.; Ma, X. A strictly predefined-time convergent and anti-noise fractional-order zeroing neural network for solving time-variant quadratic programming in kinematic robot control. Neural Netw. 2025, 186, 107279. [Google Scholar] [CrossRef]
- Hua, C.; Cao, X.; Liao, B. Real-time solutions for dynamic complex matrix inversion and chaotic control using ODE-based neural computing methods. Comput. Intell. 2025, 41, e70042. [Google Scholar] [CrossRef]
- Zhang, B.; Zheng, Y.; Li, S.; Chen, X.; Mao, Y.; Pham, D. Inverse-free hybrid spatial-temporal derivative neural network for time-varying matrix Moore-Penrose inverse and its circuit schematic. IEEE Trans. Circuits-II 2025, 72, 499–503. [Google Scholar] [CrossRef]
- Yan, D.; Li, C.; Wu, J.; Deng, J.; Zhang, Z.; Yu, J.; Liu, P. A novel error-based adaptive feedback zeroing neural network for solving time-varying quadratic programming problems. Mathematics 2024, 12, 2090. [Google Scholar] [CrossRef]
- Peng, Z.; Huang, Y.; Xu, H. A novel high-efficiency variable parameter double integration ZNN model for time-varying Sylvester equations. Mathematics 2025, 13, 706. [Google Scholar] [CrossRef]
- Uhlig, F. Adapted AZNN methods for time-varying and static matrix problems. Electron. J. Linear Algebra 2023, 39, 164–180. [Google Scholar] [CrossRef]
- Guo, D.; Lin, X. Li-function activated Zhang neural network for online solution of time-varying linear matrix inequality. Neural Process. Lett. 2020, 52, 713–726. [Google Scholar] [CrossRef]
- Katsikis, V.N.; Mourtas, S.D.; Stanimirovic, P.S.; Zhang, Y. Solving complex-valued time-varying linear matrix equations via QR decomposition with applications to robotic motion tracking and on angle-of-arrival localization. IEEE Trans. Neural Netw. Learn. Syst. 2022, 33, 3415–3424. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.; Kang, X.; Zhang, Y. Continuous and discrete ZND models with aid of eleven instants for complex QR decomposition of time-varying matrices. Mathematics 2023, 11, 3354. [Google Scholar] [CrossRef]
- Hu, C.; Kang, X.; Zhang, Y. Three-step general discrete-time Zhang neural network design and application to time-variant matrix inversion. Neurocomputing 2018, 306, 108–118. [Google Scholar] [CrossRef]
- Liu, K.; Liu, Y.; Zhang, Y.; Wei, L.; Sun, Z.; Jin, L. Five-step discrete-time noise-tolerant zeroing neural network model for time-varying matrix inversion with application to manipulator motion generation. Eng. Appl. Artif. Intel. 2021, 103, 104306. [Google Scholar] [CrossRef]
- Sun, M.; Wang, Y. General five-step discrete-time Zhang neural network for time-varying nonlinear optimization. Bull. Malays. Math. Sci. Soc. 2020, 43, 1741–1760. [Google Scholar] [CrossRef]
- Chen, J.; Zhang, Y. Discrete-time ZND models solving ALRMPC via eight-instant general and other formulas of ZeaD. IEEE Access 2019, 7, 125909–125918. [Google Scholar] [CrossRef]
- Brookes, M. The Matrix Reference Manual; Imperial College London Staff Page. 2020. Available online: http://www.ee.imperial.ac.uk/hp/staff/dmb/matrix/intro.html (accessed on 31 March 2025).
- Horn, R.A.; Johnson, C.R. Topics in Matrix Analysis; Cambridge University Press: New York, NY, USA, 1991. [Google Scholar]
- Zhang, Y.; Yang, R.; Li, S. Reciprocal Zhang dynamics (RZD) handling TVUDLMVE (time-varying under-determined linear matrix-vector equation). In Proceedings of the 37th Chinese Control and Decision Conference (CCDC), Xiamen, China, 16–19 May 2025; pp. 5794–5800. [Google Scholar]
- Griffiths, D.F.; Higham, D.J. Numerical Methods for Ordinary Differential Equations: Initial Value Problems; Springer: London, UK, 2010. [Google Scholar]
- Mathews, J.H.; Fink, K.D. Numerical Methods Using MATLAB; Prentice-Hall: Englewood Cliffs, NJ, USA, 2004. [Google Scholar]
- Suli, E.; Mayers, D.F. An Introduction to Numerical Analysis; Cambridge University Press: Oxford, UK, 2003. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.; Kang, X.; Zhang, Y. Complex, Temporally Variant SVD via Real ZN Method and 11-Point ZeaD Formula from Theoretics to Experiments. Mathematics 2025, 13, 1841. https://doi.org/10.3390/math13111841
Chen J, Kang X, Zhang Y. Complex, Temporally Variant SVD via Real ZN Method and 11-Point ZeaD Formula from Theoretics to Experiments. Mathematics. 2025; 13(11):1841. https://doi.org/10.3390/math13111841
Chicago/Turabian StyleChen, Jianrong, Xiangui Kang, and Yunong Zhang. 2025. "Complex, Temporally Variant SVD via Real ZN Method and 11-Point ZeaD Formula from Theoretics to Experiments" Mathematics 13, no. 11: 1841. https://doi.org/10.3390/math13111841
APA StyleChen, J., Kang, X., & Zhang, Y. (2025). Complex, Temporally Variant SVD via Real ZN Method and 11-Point ZeaD Formula from Theoretics to Experiments. Mathematics, 13(11), 1841. https://doi.org/10.3390/math13111841