
Conformable Lagrangian Mechanics of Actuated Pendulum

 ,
,  , and
, and
Abstract
1. Introduction
- Since, in general, dissipation described by non-conservative forces breaks the variational structure of classical mechanics, modifying the kinetic term with conformable derivatives preserves the action principle, which allows us to construct models with various symmetries, conserved charges, and phenomenological rich generalizations. This is crucial for maintaining compatibility with Noether’s theorem, symplectic structure, canonical quantization, and important tools of theoretical physics.
- Since the conformable derivative encodes scale-dependent time dynamics and breaks time-reversal symmetry when , embedding the irreversible behavior in the kinetic term itself can be viewed as geometrizing dissipation, similar to how general relativity encodes forces into the curvature of spacetime.
- Traditional damping models require inserting terms like , with arbitrary coefficients b. These models break energy conservation and lack universality. The conformable kinetic term replaces such ad hoc additions with a single parameter , offering a principled and systematic generalization of classical mechanics, which is important for theoretical construction. In phenomenological applications, should be related to physical parameters.
- Quantum systems with classical damping are notoriously hard to formulate. The conformable approach, with its modified kinetic term, allows the direct application of canonical quantization [9,33,34,37,38]:where is the canonical momentum associated to the conformable coordinate operator , is the Planck constant in the conformable quantum mechanics, and is the conformable derivative for variable x. The conformable setting preserves Hermiticity and inner product structure on a properly defined Hilbert space. The energy spectrum and eigenfunctions can be derived as usual, providing a connection between dissipation and quantum theory.
- The dissipation is obtained in the conformable approach with a minimal and elegant modification, replacing with . No external functions or potentials are introduced. The resulting models connect naturally to memory effects, anomalous diffusion, and non-Markovian behavior.
2. Fundamentals of Conformable Calculus
2.1. Conformable Derivative and Integral
2.2. Conformable, Fractal, and Jackson Derivatives
3. Conformable Lagrangian Mechanics of Point Particle
3.1. Conformable Lagrangian Formalism
3.2. Brief Discussion of Generalized Integration Measures
- Positivity: for to define a bona fide measure.
- Regularity: should be sufficiently smooth, e.g., continuous or piecewise continuous, so that integration by parts holds
- Normalization (optional): For probability or thermodynamic interpretations, one may require that
- Exponential Decay: models a memory kernel with finite memory timescale [57].
- Stretched Exponential: captures a broad distribution of memory times.
- Power-Law: yields a long-memory kernel like in fractional integrals.
4. Conformable Actuated Pendulum
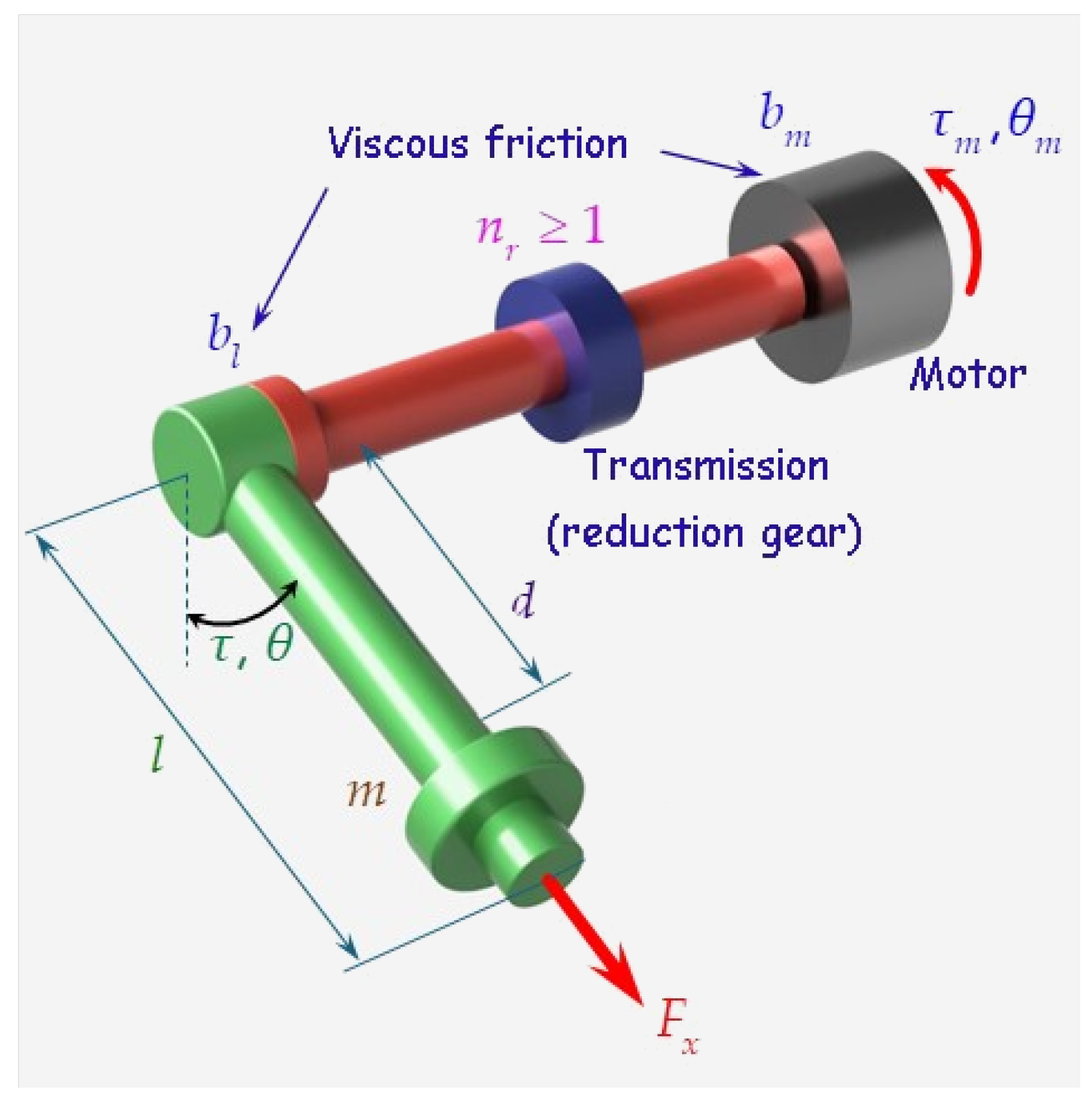
4.1. Classical Actuated Pendulum
4.2. Conformable Dynamics with No Force
- Case 1: .
- Case 2: .
- Case 3: with .
4.3. General Solution for
4.4. Power Series Solution of the Linearized Equation for
5. Conformable Actuated Pendulum with a Non-Conservative Force
5.1. Physical Interpretation of Parameters
5.2. Numerical Validation Example
5.3. Families of Conformable Equations
- Case 1: .
- Case 2: .
- Case 3: with .
5.4. General Solution for
5.5. Power Series Solution of Linearized Forced Equation for
6. Numerical Study of the General Conformable Actuated Pendulum
| 1.00 | 0.095 | 0.090 | 0.085 |
| 0.75 | 0.095 | 0.075 | 0.055 |
| 0.60 | 0.095 | 0.065 | 0.035 |
| 0.50 | 0.095 | 0.050 | 0.020 |
| 0.33 | 0.095 | 0.030 | 0.008 |
| 0.25 | 0.095 | 0.020 | 0.005 |
7. Discussion
7.1. Summary for Conformable Homogeneous Equations
- : Equation (56) displays a time-dependent inertia term proportional to t and a constant effective damping term. Its linearized form can be related to the Bessel-type equations.
- , : Equation (57) is a non-autonomous ODE with power-law time-dependent coefficients. In general, even linearized, these do not belong to the classical families, like Euler–Cauchy, with well-known closed-form solutions. Therefore, their analysis typically requires specialized techniques or numerical methods.
7.2. Summary for Conformable Actuated Pendulum with a Non-Conservative Force
- : Equation (71) is an autonomous nonlinear ODE (or its linearized version is a second-order linear ODE with constant coefficients). This is the standard model for an actuated pendulum with friction and external forces.
- : Equation (73) is a non-autonomous ODE with a time-dependent inertial term () and a constant effective damping. By linearization, it can often be reformulated as a Bessel-type or Euler-type ODE with known analytic solutions in terms of special functions (Mittag–Leffler functions, Wright function, Prabhakar function, generalized hypergeometric gunctions, Fox H-functions, Meijer G-functions, etc.).
- : Equation (74) represents a more general class of non-autonomous ODEs with power-law time-dependent coefficients. In general, these equations do not correspond to standard forms unless further transformations or approximations are applied. Their analysis typically relies on series methods (such as the Frobenius method) or numerical approaches.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Simple Numerical Comparison of Standard and Conformal Integration Measures
| Difference from | ||
| 1.0 | 0 | |
| 0.75 | ||
| 0.5 | ||
| 0.25 |
Appendix B. Proof of the General Solution of Equation (60)
Appendix C. Proof of the Solution of Equation (62)
Appendix D. Proof of the Solution of Equation (76)
Appendix E. Power Series Solution of the Linearized Equation (96)
- (i)
- The Inertial Term:
- (ii)
- The First Part of the Damping Term:
- (iii)
- The Second Part of the Damping Term:
- (iv)
- The Restoring Term:
- Case 1: If then
- Case 2: If then
- For : The term from the first series (with exponent ) leads toNote that in the homogeneous problem, the right-hand side is zero. If a non-zero forcing is present, one must first subtract a particular solution.
- For : The term from the second series (with exponent ) results inOnce again, for a non-trivial solution, it is necessary to have ; hence, in the homogeneous case, this formally requires that or, alternatively, a reinterpretation of the dominant balance. In practice, the appropriate choice of s is dictated by the physical context and the imposed regularity conditions.
References
- Khalil, R.; Al Horani, M.; Yousef, A.; Sababheh, M. A new definition of fractional derivative. J. Comput. Appl. Math. 2014, 264, 65–70. [Google Scholar] [CrossRef]
- Kilbas, A.; Srivastava, H.; Trujillo, J. Theory and Applications of Fractional Differential Equations; North-Holland Mathematics Studies; Elsevier Science & Tech: Amsterdam, The Netherlands, 2006. [Google Scholar]
- Batarfi, H.; Losada, J.; Nieto, J.J.; Shammakh, W. Three-point boundary value problems for conformable fractional differential equations. J. Funct. Spaces 2015, 2015, 706383. [Google Scholar] [CrossRef]
- Abdeljawad, T. On conformable fractional calculus. J. Comput. Appl. Math. 2015, 279, 57–66. [Google Scholar] [CrossRef]
- Atangana, A.; Baleanu, D.; Alsaedi, A. New properties of conformable derivative. Open Math. 2015, 13, 000010151520150081. [Google Scholar] [CrossRef]
- Karayer, H.; Demirhan, D.; Büyükkılıç, F. Conformable Fractional Nikiforov—Uvarov Method. Commun. Theor. Phys. 2016, 66, 12. [Google Scholar] [CrossRef]
- Anderson, D.R. Taylor’s Formula and Integral Inequalities for Conformable Fractional Derivatives. In Contributions in Mathematics and Engineering: In Honor of Constantin Carathéodory; Springer International Publishing: Cham, Switzerland, 2016; pp. 25–43. [Google Scholar] [CrossRef]
- Katugampola, U.N. A New Fractional Derivative with Classical Properties. arXiv 2014, arXiv:1410.6535. [Google Scholar]
- Anderson, D.R.; Ulness, D.J. Properties of the Katugampola fractional derivative with potential application in quantum mechanics. J. Math. Phys. 2015, 56, 063502. [Google Scholar] [CrossRef]
- Benkhettou, N.; Hassani, S.; Torres, D.F. A conformable fractional calculus on arbitrary time scales. J. King Saud Univ.-Sci. 2016, 28, 93–98. [Google Scholar] [CrossRef]
- Tarasov, V.E. No violation of the Leibniz rule. No fractional derivative. Commun. Nonlinear Sci. Numer. Simul. 2013, 18, 2945–2948. [Google Scholar] [CrossRef]
- Ortigueira, M.D.; Tenreiro Machado, J. What is a fractional derivative? J. Comput. Phys. 2015, 293, 4–13. [Google Scholar] [CrossRef]
- Abdelhakim, A.A.; Machado, J.A.T. A critical analysis of the conformable derivative. Nonlinear Dyn. 2019, 95, 3063–3073. [Google Scholar] [CrossRef]
- Abdelhakim, A.A. The flaw in the conformable calculus: It is conformable because it is not fractional. Fract. Calc. Appl. Anal. 2019, 22, 242–254. [Google Scholar] [CrossRef]
- Ünal, E.; Gökdoğan, A.; Çelik, E. Solutions of sequential conformable fractional differential equations around an ordinary point and conformable fractional Hermite differential equation. arXiv 2015, arXiv:1503.05407. [Google Scholar] [CrossRef]
- Jarad, F.; Abdeljawad, T.; Baleanu, D. Generalized conformable fractional calculus on arbitrary time scales. Math. Methods Appl. Sci. 2017, 40, 2588–2600. [Google Scholar]
- Jarad, F.; Abdeljawad, T.; Baleanu, D. Generalized conformable fractional calculus and applications to diffusion equations. Adv. Differ. Equ. 2018, 2018, 1–16. [Google Scholar]
- Jarad, F.; Abdeljawad, T.; Baleanu, D. Generalized conformable fractional calculus on Banach spaces and applications. Math. Methods Appl. Sci. 2019, 42, 7741–7756. [Google Scholar]
- Gözütok, N.Y.; Gözütok, U. Multivariable conformable fractional calculus. arXiv 2017, arXiv:1701.00616. [Google Scholar]
- Kaabar, M.K.; Martínez, F.; Martínez, I.; Siri, Z.; Paredes, S. Novel investigation of multivariable conformable calculus for modeling scientific phenomena. J. Math. 2021, 2021, 3670176. [Google Scholar] [CrossRef]
- Weberszpil, J.; Lazo, M.J.; Helayël-Neto, J. On a connection between a class of q-deformed algebras and the Hausdorff derivative in a medium with fractal metric. Phys. A Stat. Mech. Its Appl. 2015, 436, 399–404. [Google Scholar] [CrossRef]
- Wang, K. Construction of fractal soliton solutions for the fractional evolution equations with conformable derivative. Fractals 2023, 31, 2350014. [Google Scholar] [CrossRef]
- Aphithana, A.; Ntouyas, S.K.; Tariboon, J. Forced oscillation of fractional differential equations via conformable derivatives with damping term. Bound. Value Probl. 2019, 2019, 47. [Google Scholar] [CrossRef]
- Feng, Q. Oscillation for a class of fractional differential equations with damping term in the sense of the conformable fractional derivative. Eng. Lett. 2022, 30, 311–317. [Google Scholar]
- Jarad, F.; Adjabi, Y.; Baleanu, D.; Abdeljawad, T. On defining the distributions δr and (δ′)r by conformable derivatives. Adv. Differ. Equ. 2018, 2018, 407. [Google Scholar] [CrossRef]
- Xu, J.; Cui, Y.; Rui, W. Innate Character of Conformable Fractional Derivative and Its Effects on Solutions of Differential Equations. Math. Methods Appl. Sci. 2025. [Google Scholar] [CrossRef]
- Zhao, D.; Luo, M. General conformable fractional derivative and its physical interpretation. Calcolo 2017, 54, 903–917. [Google Scholar] [CrossRef]
- Zhao, D.; Pan, X.; Luo, M. A new framework for multivariate general conformable fractional calculus and potential applications. Phys. A Stat. Mech. Its Appl. 2018, 510, 271–280. [Google Scholar] [CrossRef]
- Anderson, D.; Camrud, E.; Ulness, D. On the nature of the conformable derivative and its applications to physics. J. Fract. Calc. Appl. 2019, 10, 92–135. [Google Scholar]
- Chung, W.S. Fractional Newton mechanics with conformable fractional derivative. J. Comput. Appl. Math. 2015, 290, 150–158. [Google Scholar] [CrossRef]
- Lazo, M.J.; Torres, D.F.M. Variational calculus with conformable fractional derivatives. IEEE/CAA J. Autom. Sin. 2017, 4, 340–352. [Google Scholar] [CrossRef]
- Chung, W.S.; Zare, S.; Hassanabadi, H. Investigation of Conformable Fractional Schrödinger Equation in Presence of Killingbeck and Hyperbolic Potentials. Commun. Theor. Phys. 2017, 67, 250. [Google Scholar] [CrossRef]
- Mozaffari, F.S.; Hassanabadi, H.; Sobhani, H. On the Conformable Fractional Quantum Mechanics. J. Korean Phys. Soc. 2018, 72, 980–986. [Google Scholar] [CrossRef]
- Chung, W.S.; Zare, S.; Hassanabadi, H.; Maghsoodi, F. The effect of fractional calculus on the formation of quantum-mechanical operators. Math. Methods Appl. Sci. 2020, 11, 6950–6967. [Google Scholar] [CrossRef]
- Alabedalhadi, M.; Al-Smadi, M.; Al-Omari, S.; Baleanu, D.; Momani, S. Structure of optical soliton solution for nonliear resonant space-time Schrödinger equation in conformable sense with full nonlinearity term. Phys. Scr. 2020, 95, 105215. [Google Scholar] [CrossRef]
- Hammad, M.; Yaqut, A.S.; Abdel-Khalek, M.; Doma, S. Analytical study of conformable fractional Bohr Hamiltonian with Kratzer potential. Nucl. Phys. A 2021, 1015, 122307. [Google Scholar] [CrossRef]
- Al-Masaeed, M.; Rabei, E.M.; Al-Jamel, A.; Baleanu, D. Extension of perturbation theory to quantum systems with conformable derivative. Mod. Phys. Lett. A 2021, 36, 2150228. [Google Scholar] [CrossRef]
- Al-Masaeed, M.; Rabei, E.M.; Al-Jamel, A. WKB Approximation with Conformable Operator. arXiv 2021, arXiv:2111.01547. [Google Scholar] [CrossRef]
- Al-Masaeed, M.; Rabei, E.M.; Al-Jamel, A. Extension of the variational method to conformable quantum mechanics. Math. Methods Appl. Sci. 2022, 45, 2910–2920. [Google Scholar] [CrossRef]
- Al-Masaeed, M.; Rabei, E.M.; Al-Jamel, A.; Baleanu, D. Quantization of fractional harmonic oscillator using creation and annihilation operators. Open Phys. 2021, 19, 395–401. [Google Scholar] [CrossRef]
- Rabei, E.M.; Al-Masaeed, M.; Al-Jamel, A. Solution of the Conformable Angular Equation of the Schrodinger Equation. arXiv 2022, arXiv:2203.11615. [Google Scholar]
- AlBanwa, T.; Al-Jamel, A.; Rabei, E.M.; Al-Masaeed, M.G. Quantization of the Bateman damping system with conformable derivative. Mod. Phys. Lett. A 2024, 39, 2450191. [Google Scholar] [CrossRef]
- Jafari, A.P.F.; Madanbeigi, M. Conformable derivative and fractal derivative of functions on the interval [0, 1]. Phys. J. 2019, 4, 82–90. [Google Scholar]
- Has, A.; Yılmaz, B.; Baleanu, D. On the geometric and physical properties of conformable derivative. Math. Sci. Appl. E-Notes 2024, 12, 60–70. [Google Scholar] [CrossRef]
- Tarasov, V.E. “Conformable fractional” derivatives and integrals are integer-order operators: Physical and geometrical interpretations, applications to fractal physics. Chaos Solitons Fractals 2025, 192, 116066. [Google Scholar] [CrossRef]
- Haouam, I. On the conformable fractional derivative and its applications in physics. J. Theor. Appl. Phys. 2024, 18, 1. [Google Scholar] [CrossRef]
- Weberszpil, J.; Godinho, C.; Liang, Y. Dual conformable derivative: Variational approach and nonlinear equations. Europhys. Lett. 2020, 128, 31001. [Google Scholar] [CrossRef]
- Eroğlu, B.B.İ.; Yapışkan, D. Generalized conformable variational calculus and optimal control problems with variable terminal conditions. Mathematics 2020, 5, 1105–1126. [Google Scholar] [CrossRef]
- Tanaka, M.; Iizuka, H. Effects of grain size and microstructures on the internal friction and Young’s modulus of a high-strength steel HT-80. J. Mater. Sci. 1991, 26, 4389–4393. [Google Scholar] [CrossRef]
- Villa, F.; Villa, E.; Nespoli, A.; Passaretti, F. Internal Friction Parameter in Shape Memory Alloys: Correlation Between Thermomechanical Conditions and Damping Properties in NiTi and NiTiCu at Different Temperatures. J. Mater. Eng. Perform. 2021, 30, 2605–2616. [Google Scholar] [CrossRef]
- Manda, S.; Kumar, S.; Pal, K.; Bhattacharyya, A.R.; Panwar, A.S.; Samajdar, I. Snoek-Dominated Internal Friction Response in bcc Steel: Relating Experiments With a Multi-scale Atomistic Computational Framework. Metall. Mater. Trans. A 2023, 54, 562–576. [Google Scholar] [CrossRef]
- Weberszpil, J.; Helayël-Neto, J.A. Structural scale q-derivative and the LLG equation in a scenario with fractionality. Europhys. Lett. 2017, 117, 50006. [Google Scholar] [CrossRef]
- Parvate, A.; Gangal, A.D. Calculus on fractal subsets of real line—I: Formulation. Fractals 2009, 17, 53–81. [Google Scholar] [CrossRef]
- Parvate, A.; Gangal, A.D. Calculus on fractal subsets of real line—II: Conjugacy with ordinary calculus. Fractals 2011, 19, 271–290. [Google Scholar] [CrossRef]
- Chung, K.S.; Chung, W.S.; Nam, S.T.; Kang, H.J. New q-derivative and q-logarithm. Int. J. Theor. Phys. 1994, 33, 2019–2029. [Google Scholar] [CrossRef]
- Golmankhaneh, A.K. Fractal Calculus and Its Applications; World Scientific: Singapore, 2022. [Google Scholar] [CrossRef]
- Tarasov, V.E. Fractional Dynamics: Applications of Fractional Calculus to Dynamics of Particles, Fields and Media; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- El-Nabulsi, R.M. A fractional action-like variational approach of some classical and quantum mechanical systems. Phys. Lett. A 2013, 377, 1247–1252. [Google Scholar]
- Riewe, F. Mechanics with fractional derivatives. Phys. Rev. E 1997, 55, 3581–3592. [Google Scholar] [CrossRef]
- Singh, S.P. Text Book of Simple Harmonic Motion And Wave Theory; Arihant Publications: Meerut, India, 2006. [Google Scholar]
- Huang, J.; Zhang, M.; Fukuda, T. Robust and Intelligent Control of a Typical Underactuated Robot: Mobile Wheeled Inverted Pendulum; Springer: Singapore, 2023. [Google Scholar]
- Gonçalves, L.N.; Fernandes, J.C.; Ferraz, A.; Silva, A.G.; Sebastião, P.J.O. Physical pendulum model: Fractional differential equation and memory effects. Am. J. Phys. 2020, 88, 962–975. [Google Scholar] [CrossRef]
- Rangaig, N.A.; Pido, A.A.G.; Pada-Dulpina, C.T. On the fractional-order dynamics of a double pendulum with a forcing constraint using the nonsingular fractional derivative approach. J. Appl. Math. Comput. Mech. 2020, 19, 95–106. [Google Scholar] [CrossRef]
- Wadi, A.; Mukhopadhyay, S.; Romdhane, L. Identifying friction in a nonlinear chaotic system using a universal adaptive stabilizer. arXiv 2022, arXiv:2202.01424. [Google Scholar] [CrossRef]
- Nápoles Valdés, J.E.; Ramirez, B.A.; Moragues, L.S.; Ferrini, M.A. Numerical simulation of local generalized derivative for a harmonic oscillator. J. Physics Appl. Mech. 2024, 1, 205. [Google Scholar]
- Boyce, W.E.; DiPrima, R.C. Elementary Differential Equations and Boundary Value Problems; John Wiley & Sons: Hoboken, NJ, USA, 2001. [Google Scholar]


{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Crişan, A.V.; Godinho, C.F.d.L.; Porto, C.M.; Vancea, I.V. Conformable Lagrangian Mechanics of Actuated Pendulum. Mathematics 2025, 13, 1634. https://doi.org/10.3390/math13101634
Crişan AV, Godinho CFdL, Porto CM, Vancea IV. Conformable Lagrangian Mechanics of Actuated Pendulum. Mathematics. 2025; 13(10):1634. https://doi.org/10.3390/math13101634
Chicago/Turabian StyleCrişan, Adina Veronica, Cresus Fonseca de Lima Godinho, Claudio Maia Porto, and Ion Vasile Vancea. 2025. "Conformable Lagrangian Mechanics of Actuated Pendulum" Mathematics 13, no. 10: 1634. https://doi.org/10.3390/math13101634
APA StyleCrişan, A. V., Godinho, C. F. d. L., Porto, C. M., & Vancea, I. V. (2025). Conformable Lagrangian Mechanics of Actuated Pendulum. Mathematics, 13(10), 1634. https://doi.org/10.3390/math13101634