1. Introduction
Elastic wave propagation through fractured media is critical in oil and gas exploration, geothermal energy, CO
2 sequestration, non-destructive evaluation of materials, and many other applications. Accurately characterizing the subsurface requires understanding how fractures and their infill influence elastic waves. However, incorporating fractures into numerical simulations is challenging because their scale is often smaller than the grid size used in numerical modeling [
1]. Consequently, various approaches have been developed to represent fractures in elastic wave simulations, each with drawbacks.
A common approach to simulating wave propagation in fractured media is to use an equivalent medium, replacing the fractured domain with an effective homogeneous medium with overall equivalent properties [
2,
3]. While this method simplifies computations, it fails to capture the discrete effects of fractures on elastic waves. In this approach, the fractures are smoothed out and, therefore, it is unsuitable when fracture spacing is comparable to or larger than the wavelength, as single and sparsely spaced fractures can significantly affect wave propagation [
4].
An alternative approach is to explicitly model fractures within wave-equation simulations, preserving their mechanical influence on elastic waves. For this purpose, various numerical methods have been developed for modeling wave propagation: the Finite-Difference Method (FDM) is widely used, but it struggles with discontinuities at interfaces [
5,
6]. Traditional finite element methods are also popular [
7], but struggle to capture the discrete nature of fractures, especially when dealing with fluid-filled fractures where wave behavior depends on mechanical and hydraulic properties. The Spectral Element Method (SEM) provides high accuracy, but it assumes that the wave field is continuous at element interfaces [
8,
9]. The Discontinuous Galerkin Method (DGM), although computationally expensive, is well suited for discrete fractures due to its ability to handle any type of discontinuities in the wave field [
10,
11,
12].
The Linear Slip Model (LSM) proposed by Schoenberg [
2] has been widely used to model fractures as interfaces with discontinuous displacements. LSM was first implemented into DGM by De Basabe et al. [
11] using the Interior-Penalty Discontinuous Galerkin Method (IP-DGM) for elastic wave propagation. IP-DGM explicitly models fractures without averaging their effects, preserving their discrete influence by incorporating LSM to accurately capture localized fracture dynamics, enabling more flexible and precise elastic wave simulations across complex geometries and fluid conditions. A related implementation using the Nodal Discontinuous Galerkin method was developed by Möller and Friederich [
13], where fractures with various rheologies are modeled via additional numerical fluxes based on LSM.
DGM is a robust numerical approach to simulate wave propagation in fractured media. Its ability to explicitly represent fractures makes it well-suited for modeling complex fracture geometries while minimizing numerical dispersion. A recent study by Pyrak-Nolte [
14] used DGM to model wave propagation across single fractures in a 2D isotropic medium, systematically examining how fracture geometry influences wave attenuation. Other studies, such as Pyrak-Nolte et al. [
15] and Rioyos-Romero [
16], have compared the effects of discrete fractures on seismic anisotropy using LSM and the effective moduli method. Their findings confirmed that the effective moduli method loses the discrete nature of fractures, whereas LSM captures the anisotropy and preserves the localized effects of fractures on wave propagation. In an elastic medium with parallel fractures, wave velocities and transmission coefficients depend on wave frequency, fracture stiffness-to-seismic impedance ratio, and angle of incidence effects that are lost in effective-medium models unless modified with complex moduli, which changes the medium from elastic to viscoelastic.
The flexibility of DGM in handling discontinuities has also enabled its integration with other high-accuracy methods to expand its applicability. For instance, Vamaraju et al. [
17] developed a Hybrid Galerkin Method (HGM) that combines DGM with the Spectral Element Method, applying DGM only in regions containing fracture while using SEM elsewhere. This approach maintains the strength of DGM in modeling fracture-induced discontinuities while improving overall computational efficiency, demonstrating the adaptability of the method to complex, heterogeneous models where fractures are spatially localized. In addition, Duru et al. [
12] extended DGM to complex 3D media by developing an energy-stable, high-order formulation using physics-based fluxes and curvilinear adaptive meshes, enhancing both stability and accuracy.
Compliance is a key parameter in LSM used to characterize fractures by defining the relationship between stress and displacement discontinuities across the fracture interface. Numerical simulations usually use compliance values that are either unrealistic or exceed those reported in the literature [
11]. Other studies relying on assumed or theoretical compliance values, such as [
11,
18,
19], may not fully capture the complexities of real fractured media.
A key aspect of this work lies in explicitly incorporating laboratory-derived fracture compliance data into IP-DGM for elastic wave simulations. Unlike previous studies that rely on assumed or unrealistic fracture properties, our approach ensures that the numerical model closely reflects physical experiments, capturing the effects of fluid-filled fractures more accurately.
In this paper, we apply IP-DGM to investigate the effects of fluid-filled fractures on elastic wave propagation, explicitly modeling fractures using LSM. We incorporate laboratory data (fracture compliances) that characterize fluid-filled fractures within IP-DGM, and analyze how fracture spacing and different fluid types influence P- and S-wave propagation, capturing key physical behaviors such as attenuation and wave delays. The paper is structured as follows:
Section 2 presents the mathematical formulation, including the governing equations, and a review of LSM in wave modeling.
Section 3 describes the numerical implementation and simulation results.
Section 4 discusses the implications of our findings, and
Section 5 concludes with key points and potential applications.
3. Numerical Simulations
3.1. Model Parameters
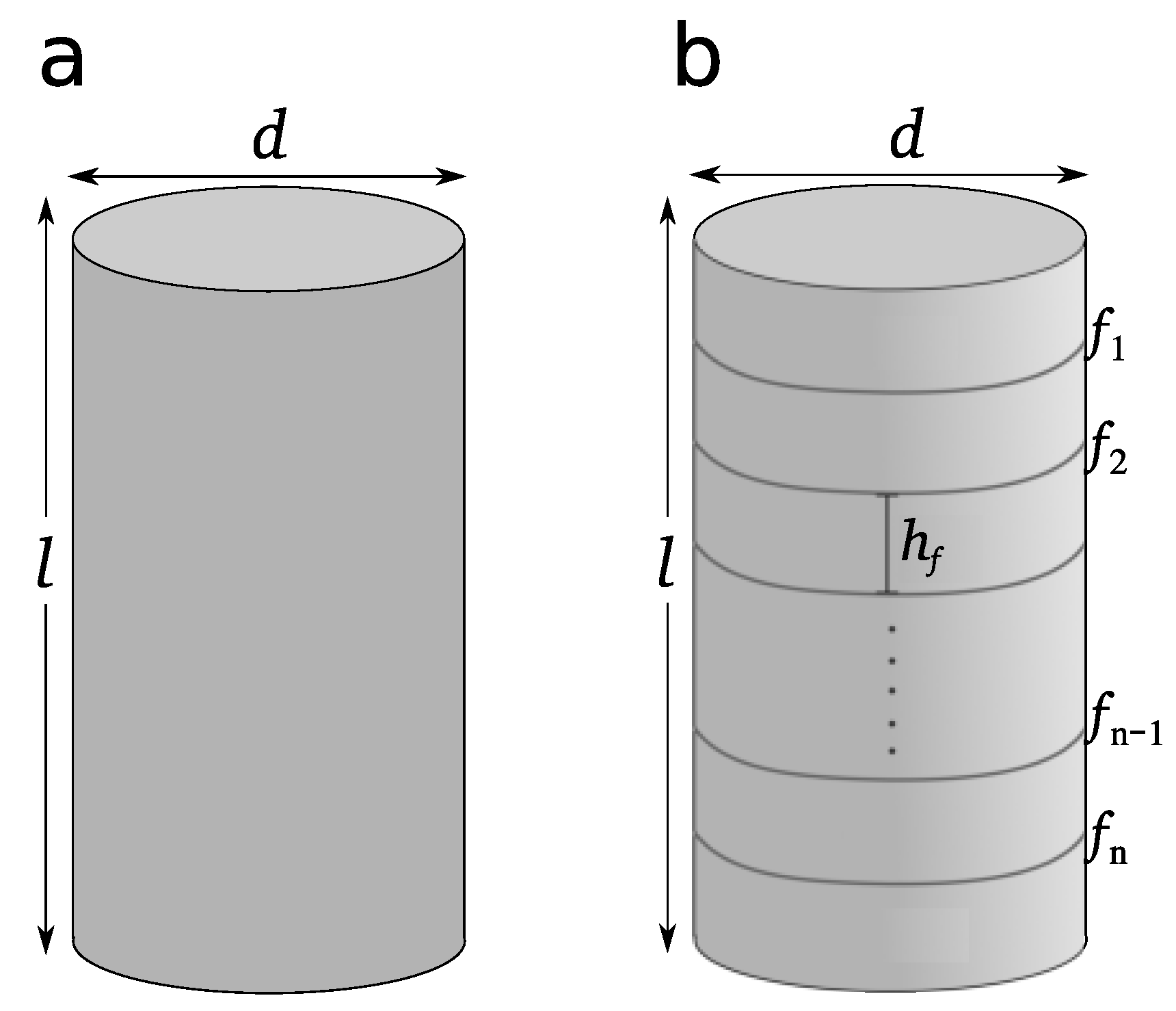
We numerically simulate the transmission of waves through parallel fractures orthogonal to the axes of a cylindrical domain, ensuring that the models are digital twins of the laboratory experiments in Ramos-Barreto et al. [
28]. The 3D model we consider, shown in
Figure 1, represents a cylinder with a height of 76.08 mm and a diameter of 38 mm. Its elastic properties are as follows: density
kg/m
3, P-wave velocity
m/s and S-wave velocity
m/s. We consider four different models: one intact (without fractures, used as a reference) and three with varying spacings between fractures. We consider four fluid types filling the fractures: air, water, silicon oil, and honey. The respective densities are listed in
Table 1. The fracture parameters for the different models, obtained from laboratory experiments using the ultrasonic pulse technique, are provided in
Table 2.
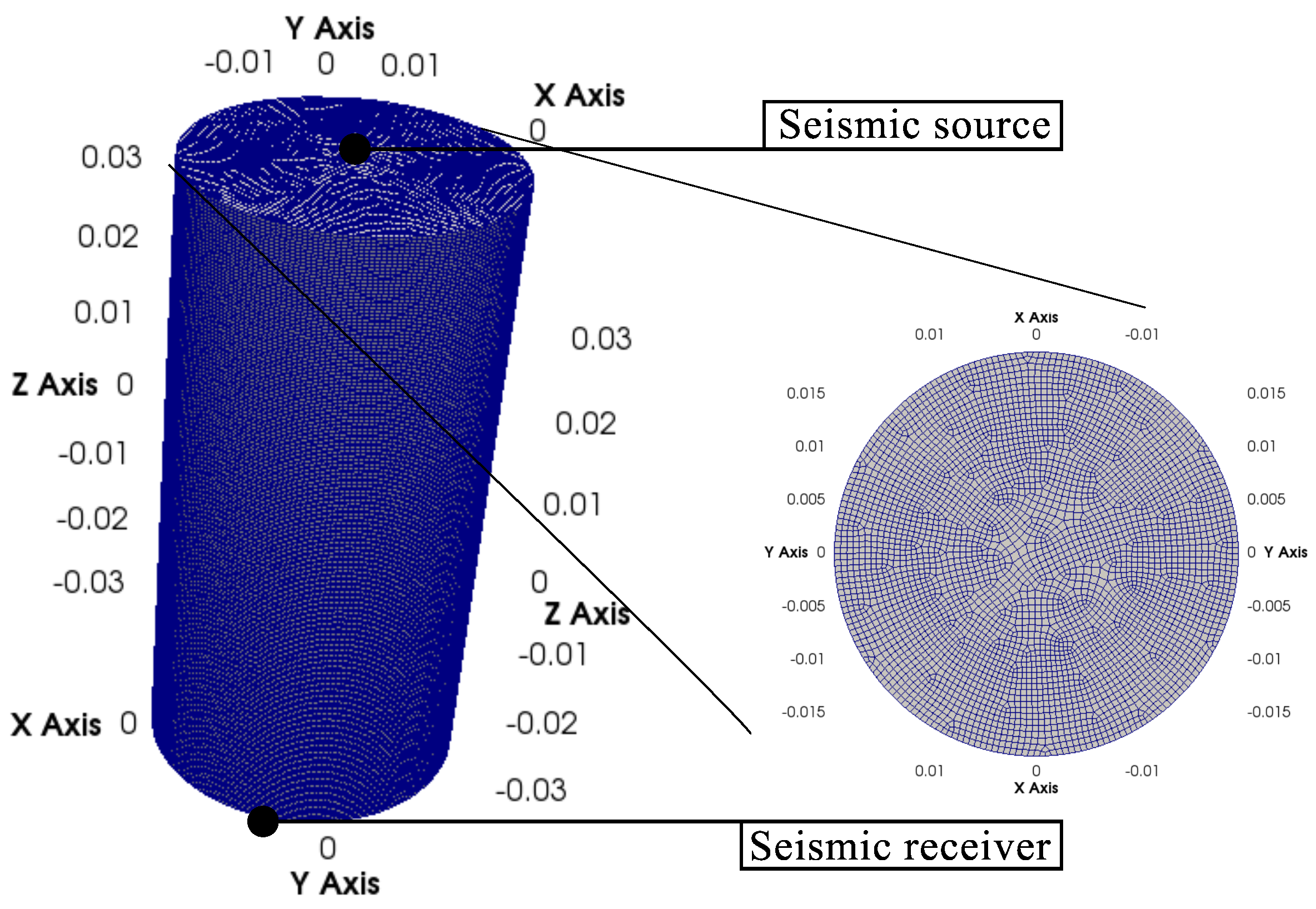
The 3D simulations were conducted in a Cartesian coordinate system (
). The 3D cylindrical mesh used in the numerical simulations was generated using the software Cubit (Cubit Version 13.1, Sandia National Laboratories,
https://cubit.sandia.gov (accessed on 11 April 2025)) (
Figure 2). The mesh consists of 807,030 hexahedral elements, carefully designed to ensure that the fractures coincide with interfaces between elements, explicitly incorporating them into the simulations. The element’s edges range between 0.36 mm and 0.54 mm. The element sizes were chosen to minimize numerical dispersion, ensuring sampling ratios of at least 5 nodes per wavelength for the S-waves and at least 11 nodes per wavelength for P-waves.
The wave source is modeled as a vector point source centered at the top of the model. The shape of the time function is a Ricker wavelet (the second derivative of a Gaussian distribution) with a peak frequency of 1 MHz. The time-stepping scheme used for the numerical experiments is second-order finite differences, with a time step of s. The P- and S-wavelengths are 6.43 mm and 3.13 mm, respectively.
3.2. Simulation Results
This section presents the results of numerical simulations of wave transmission through elongated fractures with three different fracture spacings and four types of infilled material. These simulations illustrate the effects of fluid type on the displacement field. In all experiments, the source is positioned at the top center of the cylinder, and we applied free-surface boundary conditions on its lateral surface.
The source is oriented according to the primary wave type we want to analyze. For the P-wave, the impulse acts in the
z-direction, whereas for the S-wave, it acts in the
x-direction. Both waves propagate parallel to the vertical axis, with particle motion occurring in the
z-direction for the P-wave and the
x-direction for the S-wave.
Figure 3a,b show the magnitude of the displacement field for the source polarized in the
x- and
z-directions. For comparison, all the figures in this section are plotted using the same amplitude scale.
The following shows snapshots of the displacement field for different cases. We compare behavior under two conditions: (i) the same fluid with varying fracture spacing and (ii) the same fracture spacing with various fluids. Each case is examined separately for P- and S-waves. The snapshots represent the wavefields in the x-z plane, and the color scale indicates displacement amplitudes (blue for negative displacement and red for positive displacement).
To ensure meaningful comparison between wave types, the snapshots are taken at different times: t = 28 µs for P-waves and t = 49 µs for the S-waves. These times were selected based on the velocity ratio between P- and S-waves so that the wavefields are captured at comparable propagation distances.
3.3. Same Fluid with Varying Fracture Spacing
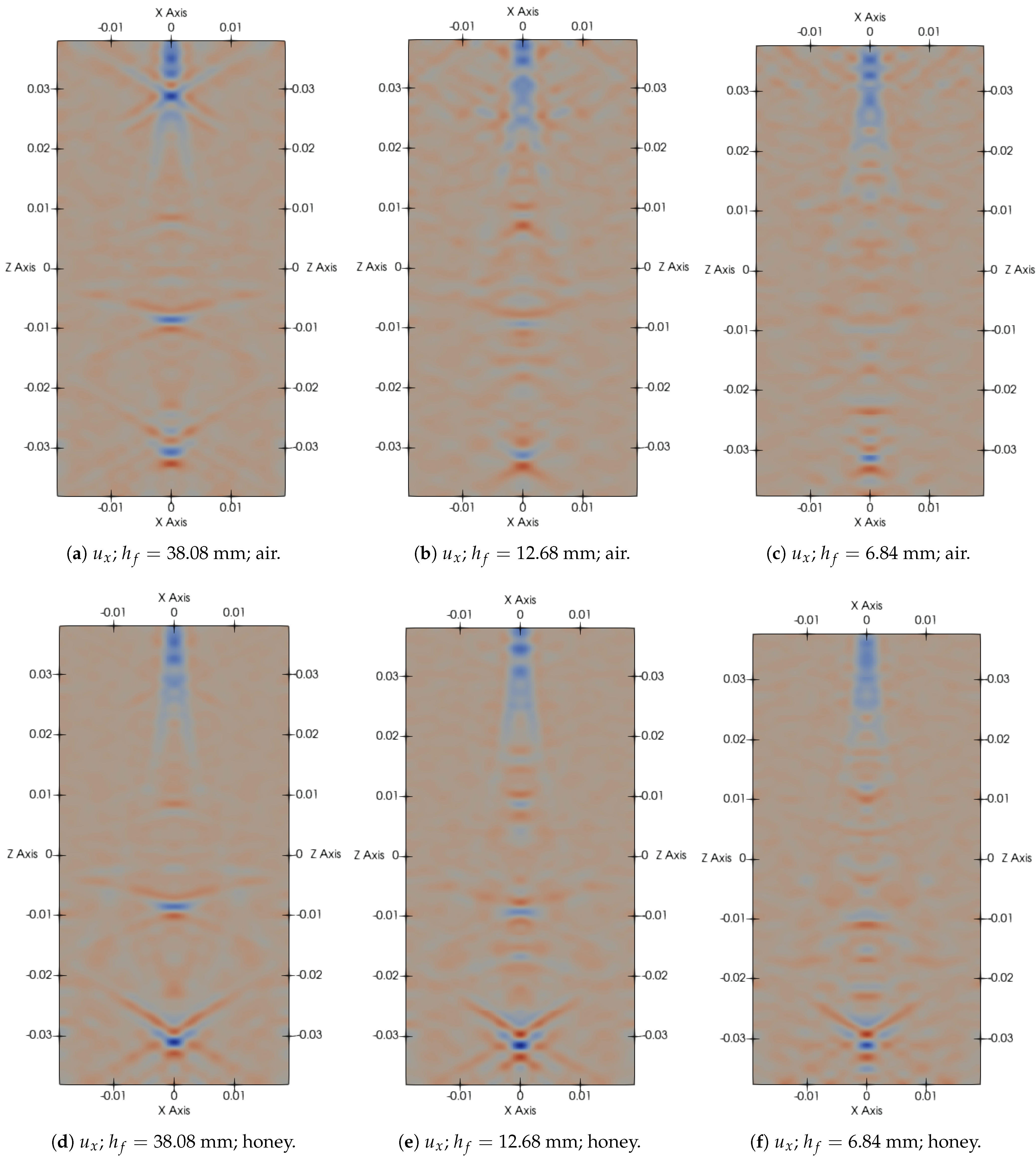
3.3.1. P-Wave Displacement Field
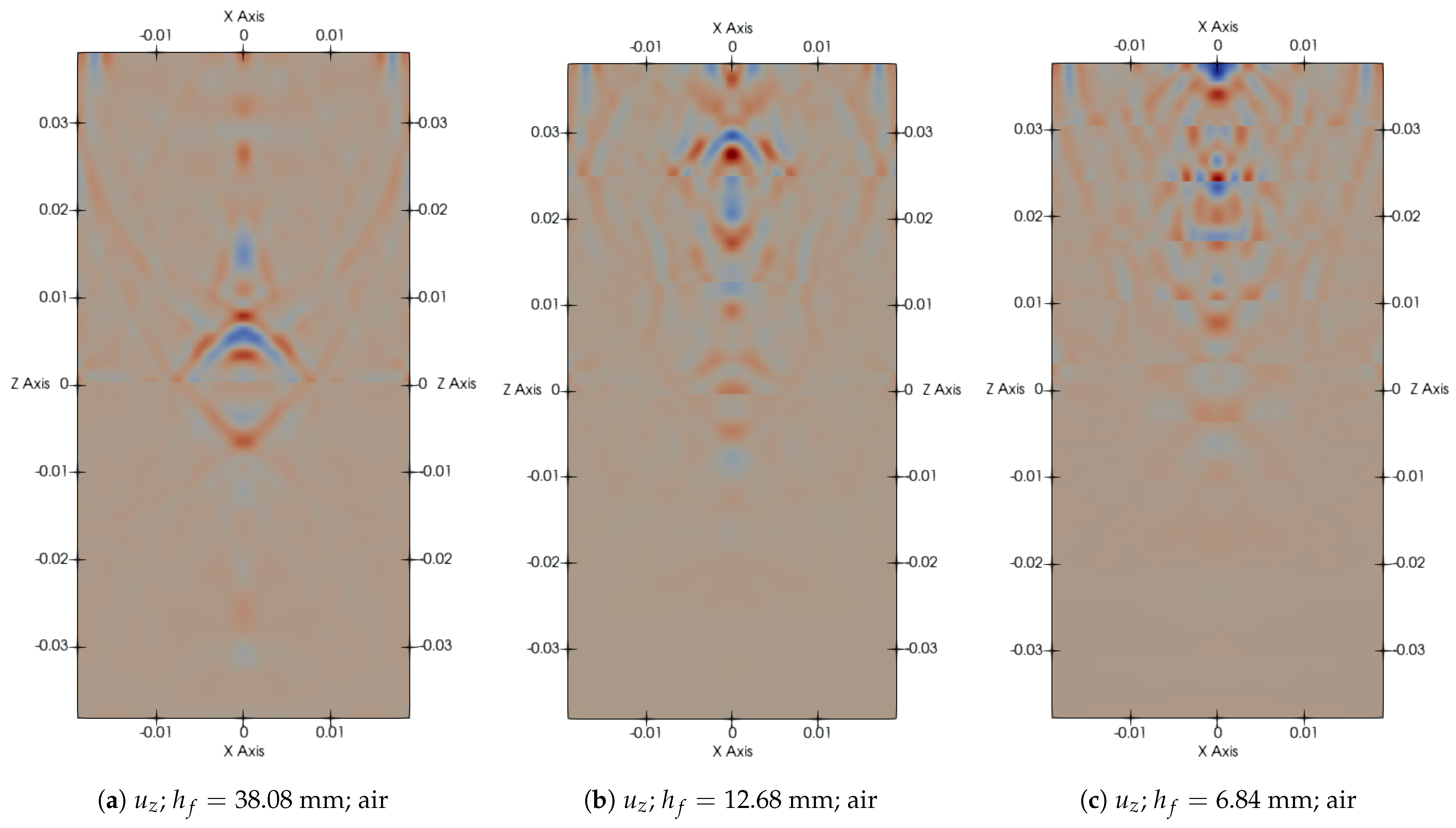
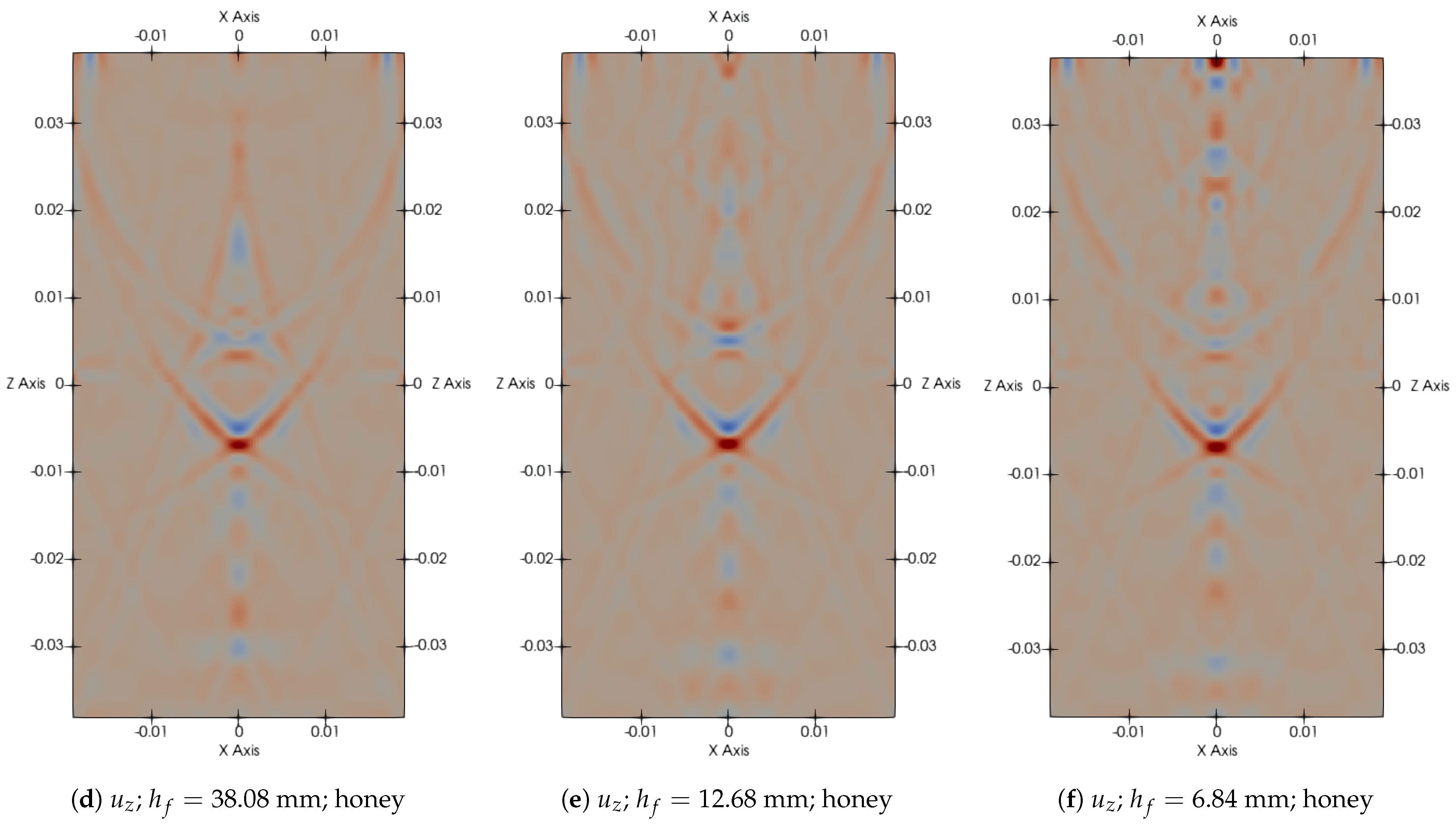
Figure 4 presents the vertical displacement field
for three different fracture spacings with two different fluids: air (top row) and honey (bottom row). These snapshots illustrate how wave propagation is affected by both the fracture spacing and fluid type. A decrease in fracture spacing leads to more intense scattering of the wavefront. This is especially evident in the air-filled cases, where tighter spacing (
Figure 4b,e) introduces interference patterns and disrupts the coherent wavefront observed at a larger fracture spacing (
Figure 4a). Strong, symmetric reflections are noticeable in the air-filled cases, particularly at large fracture spacing (
Figure 4a), where the high acoustic impedance contrast between the background and the low-density air results in limited wave transmission across the fractures. In contrast, the honey-filled cases show reduced reflection and smoother wavefields due to the higher density of honey, which lowers the impedance contrast and enables more effective energy transmission. As a result, wavefronts in the honey-filled models maintain greater coherency and exhibit more localized energy, with less pronounced multiple scattering.
3.3.2. S-Wave Displacement Field
Figure 5 shows the horizontal displacement field
corresponding to the S-wave propagation. Similar to the P-wave case shown in
Figure 4, this figure shows results for three different fracture spacings and the same infills (air in the top row and honey in the bottom row). The displacement patterns for the S-waves are very similar between air and honey-filled fractures. The overall wavefront shapes, reflection patterns, and spatial distribution of energy remain nearly unchanged. The primary difference lies in the amplitude: in the honey-filled cases (bottom row), the displacement fields appear slightly more intense, as indicated by the stronger color saturation. As in the P-wave case, denser fluid allows better energy transmission, although for the S-wave, the effect is relatively subtle.
As fracture spacing decreases (
Figure 5, left to right), the wavefields show some variation, but the wavefronts generally remain coherent and symmetric across all cases. Unlike the P-wave results, where fluid density significantly affects wave behavior, the S-wave field is less influenced by changes in fracture fill and spacing. The patterns remain highly consistent, with only subtle amplitude differences. This indicates that S-waves are less sensitive to fracture fill properties, as expected from their propagation characteristics [
33].
3.4. Same Fracture Spacing with Varying Fluid
Figure 6 and
Figure 7 display the vertical and horizontal displacement fields (
and
) for a fixed fracture spacing
mm while varying the fluid infill. The four fluids are air, water, silicon oil, and honey.
The results for vertical displacement
(
Figure 6) show that the overall wavefront becomes smoother, which means the wavefield appears more uniform, which is especially noticeable when comparing
Figure 4a,c. Air-filled fractures show stronger reflections and more pronounced scattering, and fracture interfaces are more visible, while honey-filled ones exhibit less distortion. P-waves are clearly affected by the fluid type, with denser fluids promoting transmission and reducing scattering.
In contrast, the S-wavefields show less variation than P-waves, and wavefronts remain consistent across all fluid cases. There is a mild increase in amplitude saturation in the denser fluids, but the spatial patterns remain practically unchanged. The differences between the scenarios are minimal and barely distinguishable in the snapshots.
3.5. Effective Change in Wave Velocity
We conducted a more in-depth comparison of results by analyzing the seismograms recorded at the bottom of the cylinder, generated by the source at the top.
Figure 8a,b show the seismograms of P- and S-waves for the three fracture spacings and different fluid types. These clearly illustrate how the presence of various fluids influences the amplitude of both P- and S-waves. Compared with the non-fractured model (black line), all fractured models (green, blue, magenta, and honey color) show a reduction in amplitude. Another notable difference is the arrival times, which vary more noticeably for P-waves. Additionally, the seismograms include multiple reflections caused by the boundary conditions and heterogeneities in the media.
The seismograms reveal that fluid type and fracture spacing affect wave propagation. Air-filled fractures (green line) exhibit the lowest amplitudes compared to viscous fluids, whereas honey preserves the highest amplitudes. These effects are more pronounced in P-waves (
Figure 8a). Both P- and S-wavefronts exhibit noticeable delays inversely proportional to fluid density. This effect becomes more pronounced as fracture spacing decreases, with S-wave showing less sensitivity to these changes.
4. Discussion
Pyrak-Nolte et al. [
15] conducted theoretical and experimental investigations to study wave propagation in media with multiple parallel fractures. Their experiments, conducted on laminated steel blocks, treated fractures as displacement discontinuities with specific stiffness, rather than using effective medium models. Their results demonstrated that frequency-dependent transmission coefficients, group velocity variations, and amplitude attenuation are sensitive to fracture stiffness and wave polarization. This work highlights the importance of modeling fractures explicitly. Based on this, our study uses the IP-DGM with LSM to incorporate laboratory-derived fracture compliance and fluid effects, enabling more realistic simulations of wave propagation through fluid-filled fractured media. We obtained synthetic seismograms through numerical modeling of fluid-filled fractured media. The numerical results align with the trends predicted by theoretical and analytical models.
Table 3 presents the transmission coefficients obtained from our numerical results and those obtained from laboratory measurements by Ramos-Barreto et al. [
28]. As expected, the values indicate a dependency on the fluid properties and the fracture spacing. For P-waves, transmission is highest for water and honey, particularly when fracture spacing
is largest (fewer fractures), as indicated in the upper section of
Table 3. As
decreases (i.e., fractures are more closely spaced), transmission coefficients decrease, highlighting the effect of multiple scattering and increased wave dispersion due to more fracture interfaces. Our findings are consistent with the experimental results of Pyrak-Nolte et al. [
15], who observed that group velocity and transmission coefficients depend on fracture stiffness.
A similar trend is observed for the S-wave (bottom section
Table 3), where transmission is highest for the fluid-saturated cases. Contrary to common assumptions, the S-wave transmission is, in fact, comparable to or even slightly higher than the P-wave transmission in most cases. This also highlights the lower sensitivity of S-waves to fluid properties, unlike P-waves, where air-filled fractures exhibit significantly lower transmission than liquid-filled ones, the S-wave transmission coefficients remain relatively consistent across all fluids.
The decrease in transmission with decreasing fracture spacing (lower
) reinforces the experimental findings of Pyrak-Nolte et al. [
15], confirming that wave velocities and transmission coefficients are significantly influenced by fracture spacing.
Moreover, the numerical results closely match those obtained from laboratory experiments (
Table 3 [
28]) of the wave propagation in fractured media, indicating that IP-DGM provides an accurate and reliable approach for modeling this problem.
In their study, Pyrak-Nolte et al. [
15] observed that increasing the applied load on a block of steel plates increased the fracture stiffness (decreased fracture compliance), leading to higher velocities and greater wave amplitude at normal incidence. In contrast, our study varies the fluid type in the fractures. This changes the compliance and similarly influences the wave propagation, where more compliant fractures (e.g., air-filled) exhibit lower amplitudes and longer arrival times (lower velocities), while less compliant fractures (e.g., honey-filled) result in higher amplitudes and shorter arrival times.
Higher-density fluids, such as water and honey, enhance P-wave transmission compared to lower-density infills like air. This effect is attributed to the increased bulk modulus of denser fluids, which is proportional to P-wave velocity. In contrast, fluid density does not affect S-wave transmission as much. Consequently, S-wave arrival times and amplitudes show minimal variation across different fluid types. Overall, fluid density significantly influences P-wave propagation but has a minor effect on S-waves. This supports the idea that the P-wave is more sensitive to fluid properties, and the S-wave is more dependent on the solid background [
33].
In our simulations, fluid properties (e.g., density) are implicitly accounted for through the fracture compliance values, reflecting the fluid-filled fracture’s mechanical response. The fluid improves coupling between fracture surfaces, facilitating better wave transmission. This behavior may be explained by the interaction between the pulse frequency (1 MHz) and the fracture thickness, where the pulse wavelength is large compared to the fracture aperture, allowing the fluid to enhance wave propagation instead of causing significant energy loss.
The validity of the numerical simulations is supported by direct comparison with laboratory measurements of P- and S-wave velocities and transmission coefficients across the range of fracture spacing and fluid types [
28].
Table 3 presents a comparison of transmission coefficients. For P-wave, the numerical and laboratory results are consistent with each other, especially for water and honey, with percentage errors typically below 10%. For silicon oil, discrepancies are slightly higher (∼10–12%), while air-filled fractures show large relative differences at low transmission values due to near-zero transmission in the laboratory measurements, leading to higher percentages. In the S-waves case, the agreement is strongest at larger fracture spacings, with differences generally under 10%. At smaller fracture spacing, the model tends to overestimate transmission, particularly for fluid-filled fractures. Nonetheless, the simulations reproduce the overall trend of decreasing transmission with decreasing fracture spacing and correctly reflect the fluid-dependent behavior.
Regarding wave velocities, shown in
Table 4, the numerical results obtained using IP-DGM closely match the experimental data, with differences typically within 1–2% for the S-wave velocities and generally under 3% for P-waves. This close concordance demonstrates that the model not only captures the influence of fluid infill and fracture distribution but also reproduces key physical trends observed in laboratory conditions. The strong match across all tested fluids and fracture configurations reinforces the accuracy and applicability of the IP-DGM approach for simulating wave propagation in fractured media.
5. Conclusions
We simulated wave propagation across fractured media saturated with different fluids using the Interior Penalty Discontinuous Galerkin Method (IP-DGM). In this method, fractures are explicitly included without losing their discreetness. The numerical simulations of a pulse propagating across a cylinder allowed us to analyze the behavior of P- and S-waves as they travel through fractured media saturated with different fluids and evaluate how these affect the waveform.
IP-DGM effectively captures the influence of fluid type on wave propagation through compliance values. For instance, IP-DGM reproduces key wave propagation behaviors, such as reducing the amplitudes and arrival-time delays. Our results show that P-waves are more sensitive to the fluid type, with higher-density fluids enabling greater transmission and reduced wavefront distortion attributed to reduced acoustic impedance contrast. S-waves show comparatively lower sensitivity to fluid type, maintaining consistent wavefront structure and transmission across different fluid types.
Using experimentally measured compliance values strengthens the physical validity of the simulations. Our approach accurately captures the complex interplay between fluid properties and elastic wave behavior, as demonstrated by the close correspondence between numerical simulations and laboratory measurements of wave velocities and transmission coefficients across different fracture spacings and fluid types.
These results highlight the potential of IP-DGM for modeling wave propagation in complex, fractured, and fluid-saturated media and for practical applications such as seismic monitoring of fractured reservoirs. Future work could involve performing numerical simulations by scaling the compliance of the single fracture to approximate fractures of finite thickness and analyzing their impact on wave propagation.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}