Abstract
In this article, we consider a semilinear elliptic system involving gradient terms of the form where , , is either a ball of radius or the entire space . Based on certain standard assumptions regarding the potential functions p and q, we introduce new conditions on the nonlinearities f and g to investigate the existence of entire large solutions for the given system. The method employed is successive approximation. Additionally, for specific cases of p, q, f and g, we employ Python code to plot the graph of both the numerical solution and the exact solution.
MSC:
35J10; 35J57; 35J99
1. Introduction
This paper analyzes a system of partial differential equations derived from a well-known partial differential equation that models a physical phenomenon, namely the time-independent Schrödinger equation. Specifically, we consider the semilinear elliptic system involving gradient terms of the form
where , , is either a ball of radius centered at the origin or the entire space , with certain assumptions on the functions p, q, f, g.
By their nature, the authors of scientific articles seek to address various problems in their field of study. Most of these can be discovered either through the study of a real-world phenomenon or through the analysis of various already published works. Our knowledge indicates that the system (1) is a derivative of the time-independent Schrödinger equation in quantum mechanics
where erg sec is the Planck constant, m is the mass of a particle moving under the action of a force field described by the potential and is the wave function. Here, E is the total energy of the particle.
However, even though this system (1) is derived from a partial differential equation of the type (2) that models a real phenomenon, it also appears in various fields of science and engineering. In particular, this system models the cost of a factory which plans its production as to minimize the production costs (see [1,2]).
In Equation (2), the interest is to find the solution such that
whence the motivation of our paper is to find analogous solutions for (1), specifically radially symmetric convex solutions that increases with r. That is, with notation
we need to prove the existence of a radially symmetric, convex and increasing solution for the system (1) of the type
This (3) is referred to as entire large radially symmetric solutions (large since it tends to infinity and entire as they are in ). In this context, the system (1) can be expressed in radial form
where if and if .
In practical terms, the system (3)–(4) arises in the context of production planning problems involving multiple economic regimes.
In pure mathematics, the interest lies in introducing new conditions for the functions f and g that guarantee the existence of a solution to the system (4) with the boundary condition (3).
To accomplish our objective, we present our assumptions on p, q, f and g as follows:
(A1) p, are continuous functions on ;
(A2) and are continuous and nondecreasing in each variables such that for all , we have ;
(A3) for all we have ;
(A4) for by setting defined by
we assume
Recently, two works seem to provide an answer to our problem. For instance, Wan–Shi [3] proposed conditions of the Keller–Osserman type
and Wang–Zhang–Ahmad [4] of the Osgood type
in order to fulfill the condition (3). Unfortunately, neither of these two results apply to the system
for which Lair and Mohammed [5] proved that it has a positive entire large radial solution if and only if and . Indeed, let us first note that conditions (5) and (6) are satisfied for
with positive parameters such that . Our new assumption (A4) implies that holds for , , with
meaning that our new conditions encompass both sublinear and superlinear cases of the nonlinearities f and g considered by [5].
By fixing the conditions on p, the assumptions (5), (6) and (A4) have a long history and have garnered significant interest from many researchers (see [3,5,6,7,8] and references therein).
In the paper by Padhi and Dix [8], the authors investigate the existence and asymptotic behavior of positive radial solutions to a system of nonlinear elliptic equations under similar conditions to those on functions f and g of the form (6). This research enhances the broader understanding of nonlinear elliptic systems and their applications. The study is inspired by previous works of [6,7] on similar systems and aims to present new findings in this field.
The paper by Wan and Shi [3] presents conditions that are significantly less restrictive than those in previous studies. This research advances the mathematical understanding of q-k-Hessian problems and introduces new solutions under conditions of the form (5). More recently, Wang, Zhang and Ahmad [4] achieved similar results under conditions of the form (6) for a k-Hessian system with gradient term.
This paper [9], authored by Andrey B. Muravnik, delves into the Keller–Osserman phenomena for Kardar–Parisi–Zhang (KPZ) type inequalities. The study extends classical results and provides new insights into the behavior of solutions in mathematical physics, particularly in the context of blow-up phenomena and the absence of global solutions.
A more comprehensive discussion on conditions of the form (5)–(6) is available in the recent works of [3,4]. Therefore, we will omit some additional details to focus on proving our results.
Theorem 1.
Assume and . If conditions (A1), (A2), (A3) and (A4) are satisfied, then (4) has a nonnegative solution in such that .
To formulate the next result, we denote by
and then our second result is:
Theorem 2.
Assume and . If conditions (A1)–(A4) and are satisfied, then (4) has a nonnegative, convex, entire large solution in such that .
Our strategy is to construct the solution as the limit of a monotonically increasing sequence within with arbitrary. By appealing to the Arzela–Ascoli theorem, which states that the sequence is both bounded and equicontinuous on the , we ensure that it contains a subsequence that converges to the solution in the entire space . With this observation, we can prove both of our results together.
2. Proof of Theorems 1 and 2
Let us highlight that our goal is to find the solutions and that increase with r. To achieve this, we will consider the radial form
instead of the classical form (4)/(1). We will start by proving the existence of a radial convex, increasing solution . The system (8) can be written in the integral form
Next, we define the sequences and on as below
A straightforward calculation reveals that and are nondecreasing on ; see, for example, [8]. For
we have
and
Observe that, through direct calculation, we find that
Next, our aim is to prove that the sequences
are bounded for arbitrary . By setting
we obtain
This can be expressed in an equivalent form
Integrating this inequality over , we obtain
or, equivalently
By integrating once more from 0 to , we obtain
Consequently,
It is necessary to establish certain properties for F. Firstly, the function F is bijective on their domains, ensuring the existence of their inverses of F. Secondly, since
this implies that is a monotonically increasing function on their domain. The last observation is that
In summary, due to the fact that
is increasing for all , it follows that
On the other hand, by coupling this inequality with
and
we obtain
and
with arbitrary R.
Given that the sequences and are bounded and monotonically increasing on , the limit function serves as the solution to the problem (4). Thus, the proof of Theorem 1 is concluded.
Finally, it remains to prove Theorem 2. Given that
we establish the boundedness of and on for arbitrary , in the same manner as previously proved. This confirms that the sequences and are both bounded and equicontinuous on for arbitrary . Hence, by the Arzela–Ascoli theorem, the subsequences of converges uniformly to on for arbitrary . The monotonicity of the sequence ensures that the convergence to remains valid on . Taking the limit in (10), we obtain that satisfies (9), thus proving it is the solution of (8). The fact that y and z are convex and that
yields by a standard calculation. Thus, (4) has a nonnegative, convex and nontrivial solution in , denoted by . To determine the limit of the solution, we first note that
and
The next step is to observe that by using (11) and (12) in (9), we obtain
and
by passing to the limit as in (13)–(14), we clearly have
and
At this point, it is evident that the solution is entirely large, thus proving Theorem 2.
3. A Python Code to Plot the Solution
In this section, we provide the Python code to plot the numerical solution for the system (4), for the case
and the exact solution
under the same settings.
This is possible with the assistance of [10]:
import numpy as np
import math
import matplotlib.pyplot as~plt
# Define the system of differential equations
def system(r, Y):
y, dy, z, dz = Y
d2y = ((4 * r**3 + 20 * r**2) / math.sqrt(r**2 + 1)) * math.sqrt(z)
- (2 / r) * dy - dy
d2z = ((2 * r + 6) / (r**4 + 1)) * y - (2 / r) * dz - dz
return [dy, d2y, dz, d2z]
# Initial conditions
Y0 = [1, 0, 1, 0]
# Successive approximation method
def successive_approximation(system, r_span, Y0, tol=0.000001, max_iter=1):
r_eval = np.linspace(r_span[0], r_span[1], 100)
Y = np.zeros((4, len(r_eval)))
Y[:, 0] = Y0
for i in range(1, len(r_eval)):
r = r_eval[i]
Y_prev = Y[:, i-1]
for _ in range(max_iter):
Y_new = Y_prev + np.array(system(r, Y_prev)) * (r_eval[i]
- r_eval[i-1])
if np.linalg.norm(Y_new - Y_prev) < tol:
break
Y_prev = Y_new
Y[:, i] = Y_new
return r_eval, Y
# Solve the system
r_span = (0.1, 1.4)
r_eval, sol = successive_approximation(system, r_span, Y0)
# Define the range of x
t = np.linspace(0.1, 1.4, 100)
# Exact solutions
y_exact = t**4 + 1
z_exact = t**2 + 1
# Plot the numerical solution
plt.figure(figsize=(10, 5))
plt.subplot(1, 2, 1)
plt.plot(r_eval, sol[0], label=’y(r)’)
plt.plot(r_eval, sol[2], label=’z(r)’)
plt.xlabel(’r’)
plt.ylabel(’Numerical Solution’)
plt.legend()
plt.title(’Numerical Solution of the System’)
# Plot the exact solution
plt.subplot(1, 2, 2)
plt.plot(t, y_exact, label=’y_exact(t)’, linestyle=’dashed’)
plt.plot(t, z_exact, label=’z_exact(t)’, linestyle=’dashed’)
plt.xlabel(’t’)
plt.ylabel(’Exact Solution’)
plt.legend()
plt.title(’Exact Solution of the System’)
plt.tight_layout()
plt.show()
Under the conditions specified in (15), running the above code will yield the following result:
| Number of Iterations (max_iter) | 1 |
| Tolerance (tol) | |
| Initial Values (Y0) | |
| Range of r and t | |
| The evenly spaced values within the range of r and t | 100 |
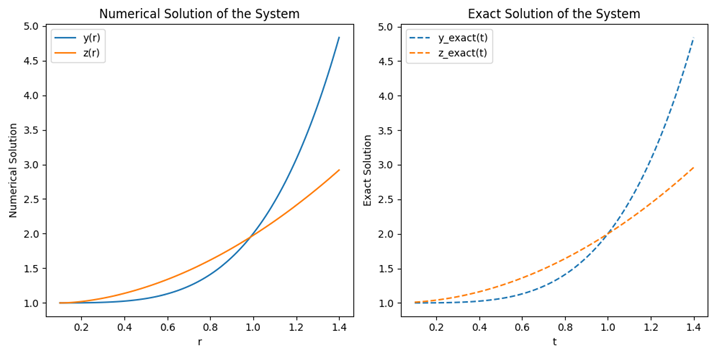
Clearly, increasing the number of iterations enhances the likelihood of the method converging to an accurate solution. Interestingly, by visually comparing the numerical and exact solutions on the plot, we observe that the numerical solution rapidly converges to the exact solution.
4. Conclusions
We have derived new conditions on the nonlinearities f and g to investigate the existence of positive radial solutions for a system involving the Laplacian operator. The result is validated through an example using Python code. This study encompasses both sublinear and superlinear cases as considered by [5] in a specific context.
Funding
This research received no external funding.
Data Availability Statement
No data were used.
Acknowledgments
The author would like to thank the referees for their valuable discussions.
Conflicts of Interest
The author declares no conflicts of interest.
References
- Cadenillas, A.; Ferrari, G.; Schuhmann, P. Optimal productionmanagement when there is regime switching and production constraints. Ann. Oper. Res. 2024, 1–33. [Google Scholar] [CrossRef]
- Covei, D.-P. Exact Solution for the Production Planning Problem with Several Regimes Switching over an Infinite Horizon Time. Mathematics 2023, 11, 4307. [Google Scholar] [CrossRef]
- Wan, H.; Shi, Y. Sharp conditions for the existence of infinitely many positive solutions to q-k-Hessian equation and systems. Electron. Res. Arch. 2024, 32, 5090–5108. [Google Scholar] [CrossRef]
- Wang, G.; Zhang, Z.; Ahmad, B. On the existence of radial solutions to a nonlinear k-Hessian system with gradient term. Nonlinear Anal. Real World Appl. 2025, 82, 104255. [Google Scholar] [CrossRef]
- Lair, A.V.; Mohammed, A. Large solutions to semi-linear elliptic systems with variable exponents. J. Math. Anal. Appl. 2014, 420, 1478–1499. [Google Scholar] [CrossRef]
- Covei, D.-P. A remark on the existence of entire large positive radial solutions to nonlinear differential equations and systems. J. Math. Anal. Appl. 2023, 519, 126824. [Google Scholar] [CrossRef]
- Covei, D.-P. A system of two elliptic equations with nonlinear convection and coupled reaction terms. Quaest. Math. 2024, 47, 437–450. [Google Scholar] [CrossRef]
- Padhi, S.; Dix, J.G. Existence of positive global radial solutions to nonlinear elliptic systems. Electron. J. Differ. Equ. 2023, 02, 231–238. [Google Scholar] [CrossRef]
- Muravnik, A.B. Keller–Osserman Phenomena for Kardar–Parisi–Zhang-Type Inequalities. Mathematics 2023, 11, 3787. [Google Scholar] [CrossRef]
- Microsoft Copilot in Edge. 2024. Available online: https://www.microsoft.com/en-us/edge/features/copilot?form=MA13FJ (accessed on 26 December 2024).
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).