

Research on Group Behavior Modeling and Individual Interaction Modes with Informed Leaders
 , ,
, ,
Abstract
1. Introduction
2. Materials and Methods
2.1. Group Dynamics Models
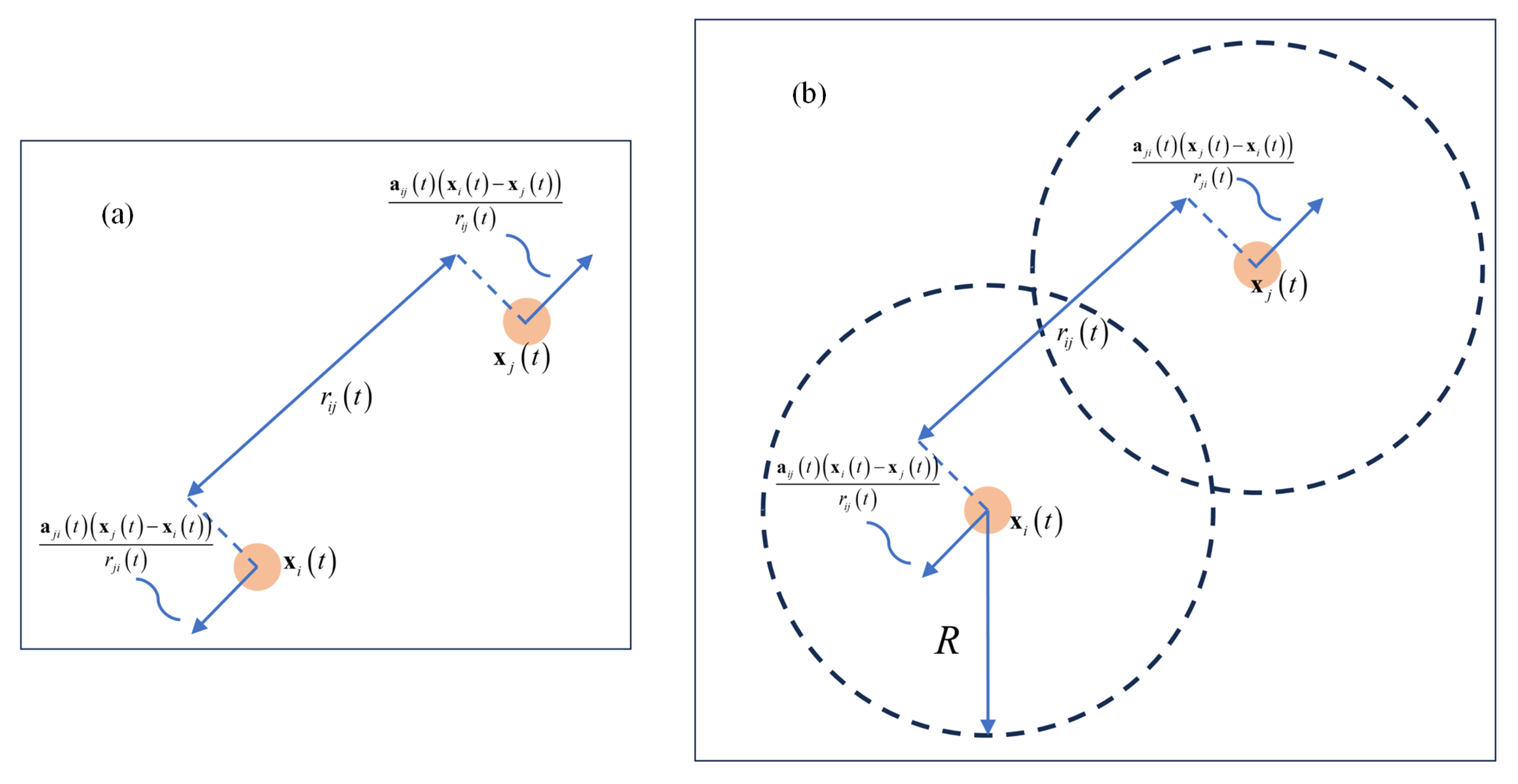
2.1.1. Group Dynamics Model with Coupling Forces
- (1)
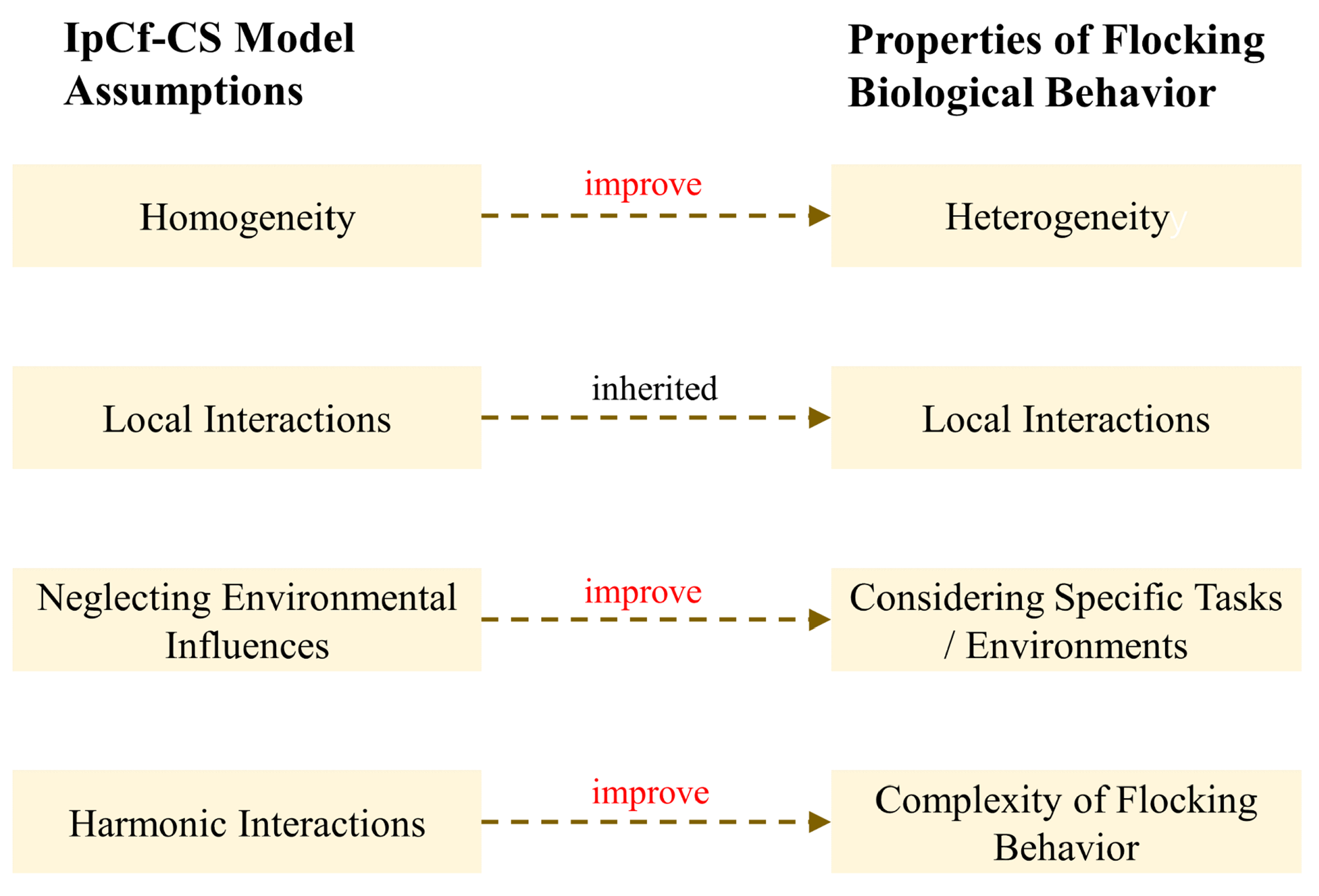
- Homogeneity: The model presupposes that all individuals within the system exhibit uniform behavior, adhering to a common set of rules for updating their states. Specifically, each individual adjusts its velocity by calculating the weighted average of velocity differences with other individuals.
- (2)
- Local Interactions: Updates to an individual’s motion state are contingent upon the states of its immediate neighbors. This mechanism is consistent with the phenomenon of information transmission through visual, auditory, or other sensory means among natural groups such as flocks of birds and schools of fish.
- (3)
- Neglecting Environmental Influences: The model does not directly incorporate the impact of environmental factors on the motion states of individuals.
- (4)
- Harmonic Interactions: The interaction force between individuals diminishes with increasing distance, with this force being designed to facilitate cohesive and coordinated behavior within the group.
- (1)
- Velocity Alignment: The model’s velocity should achieve asymptotic consistency over time.
- (2)
- Group Formation: At any given moment t, the distances between individuals in the system remain finite.
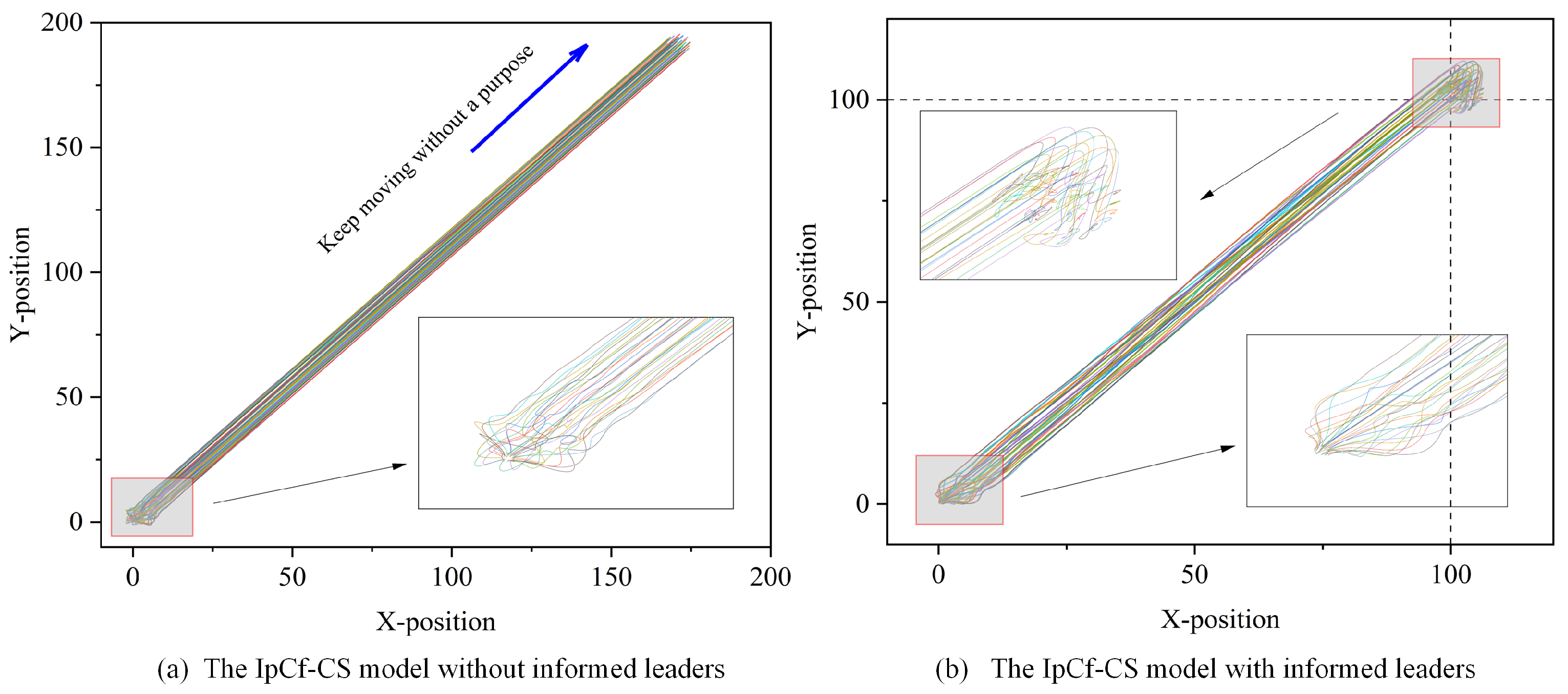
2.1.2. Biological Group Model with Informed Leaders
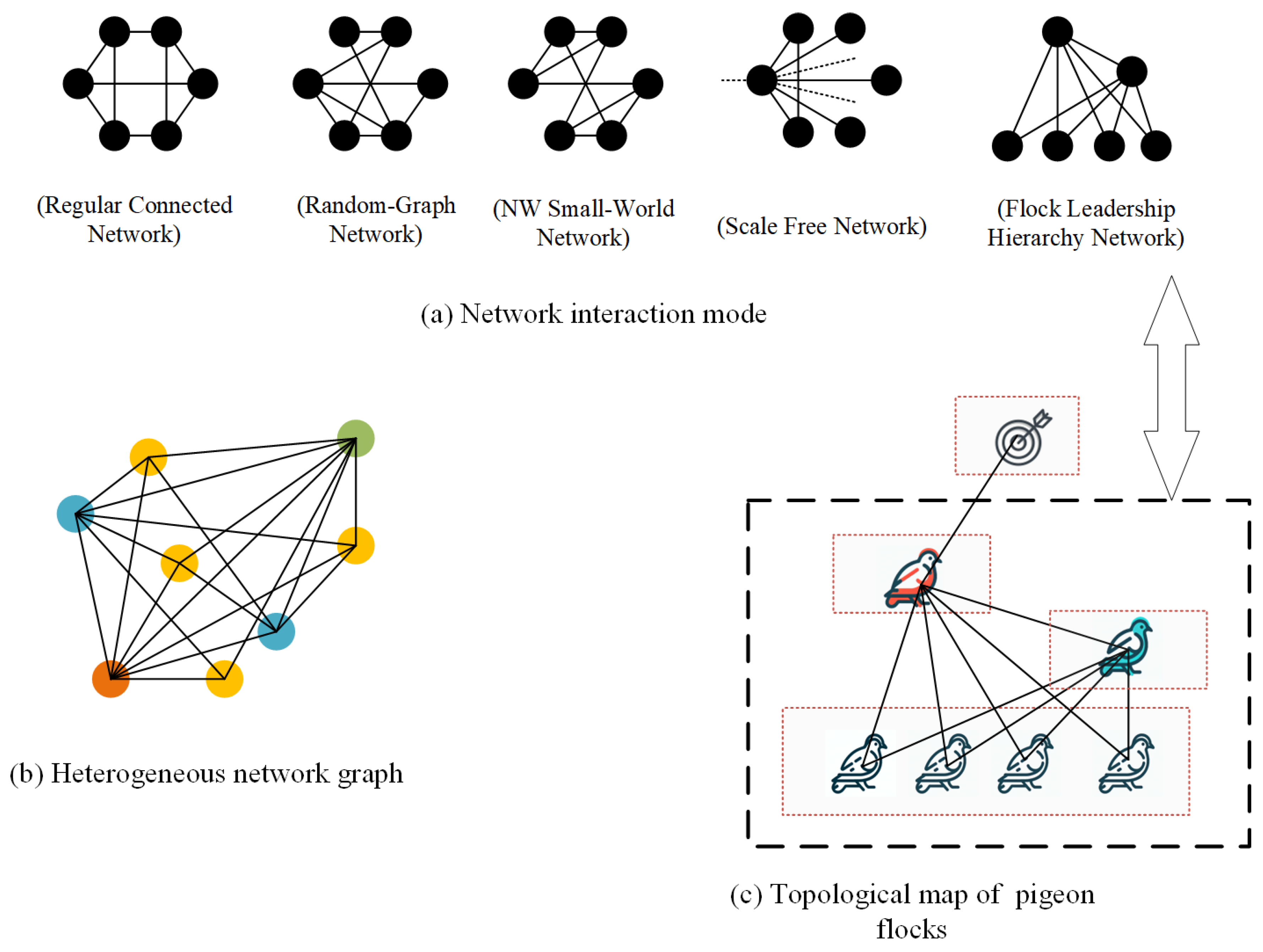
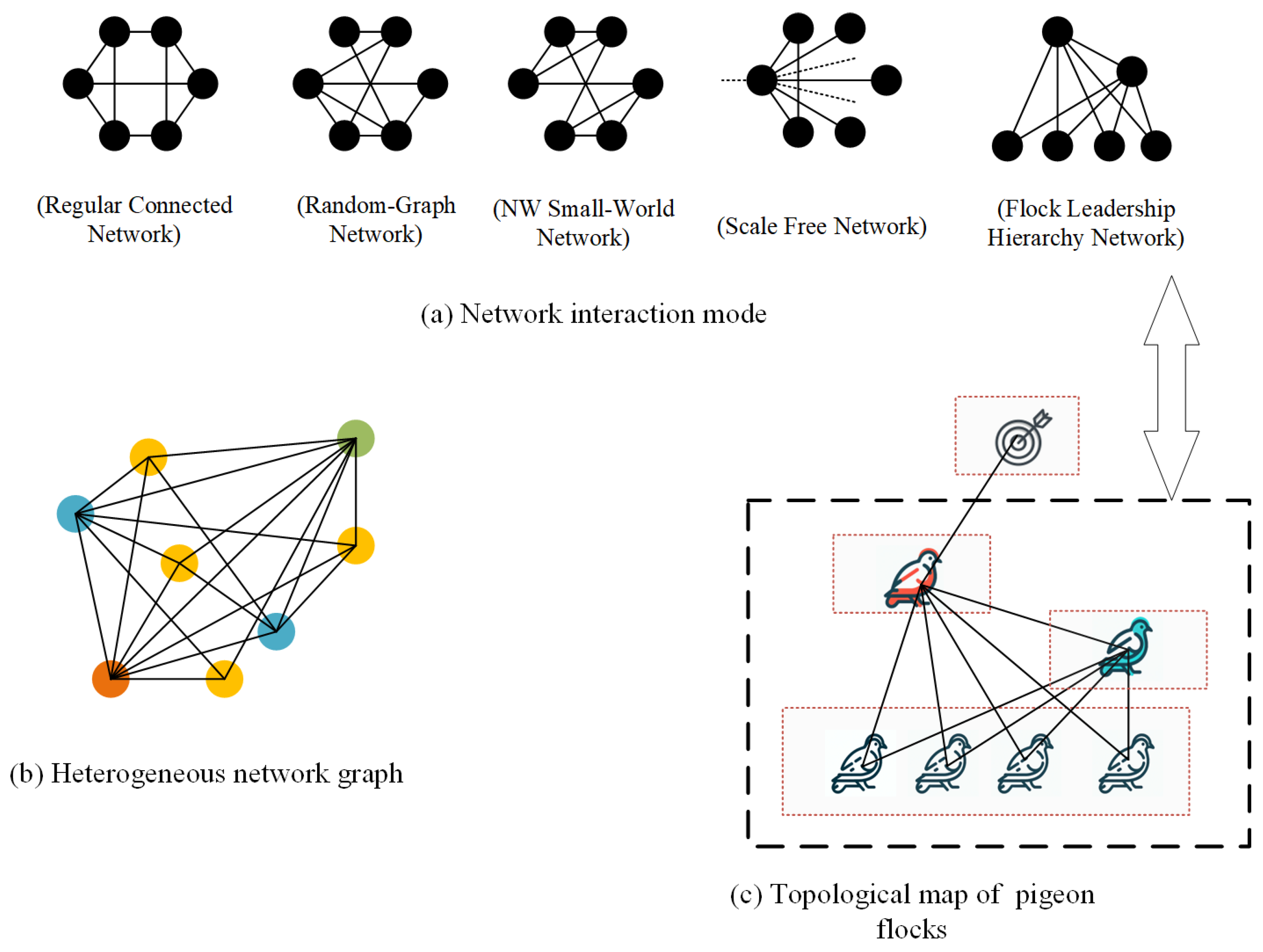
2.2. Individual Interaction Mode
2.2.1. Regular Connected Networks (RC)
- (1)
- Initialization: Begin with N isolated nodes.
- (2)
- Connection Process: For each node i (where ), establish sequential connections to a set j of E target nodes. To maintain the network’s regularity and ensure that connections loop back as they reach the end of the j list, the target nodes are determined using the modulo operation (where ). The resulting network contains a total of edges.
2.2.2. Random Graph Networks (RG)
- (1)
- Initialization: Begin with N isolated nodes.
- (2)
- Connection Process: Consider all distinct node pairs, denoted by i and , exactly once from the given N nodes. Connect each node pair with an edge at a probability . The expected number of edges in the RG network is statistically calculated as follows: .
2.2.3. Newman–Watts–Strogatz Small-World Networks (NW)
- (1)
- Initial Structure: The process begins with a regular graph of N nodes. This graph forms a one-dimensional cyclic lattice, where each node connects to its nearest k neighbors, with on each side.
- (2)
- Edge Addition: For each node pair i and j in the graph, a new edge is added between them at a fixed reconnection probability p. The process prohibits the creation of multiple edges between two nodes (heavy edges) and self-loops. The resulting NW network is distinguished by short characteristic path lengths between nodes and a high clustering coefficient.
2.2.4. Scale-Free Networks (SF)
- (1)
- Initialization: Begin with N isolated nodes.
- (2)
- Weight Assignment: Assign a weight to each node i, where and .
- (3)
- Edge Formation: Randomly select two distinct nodes i and based on probabilities proportional to their respective weights and . Add an edge from i to j (if they are not already connected).
- (4)
- Iteration: Repeat Step (3) until M edges have been established. The resulting network exhibits a power-law degree distribution , where k is the degree variable and , independent of .
2.2.5. Flock Leadership Hierarchy Networks (FLH)
- (1)
- Initialization: Begin with the number of isolated nodes. The number of individuals per layer are determined based on the number of pigeons N observed in real pigeon flock experiments [44].
- (2)
- Node Determination: For each node j in level i, where j spans from the start index of the current level to the total number of nodes within that level, establish connections. If i is less than the total number of layers, connect node j to all nodes in higher levels .
- (3)
- Iterative Connection: Continue Step (2) until all nodes across the layers are interconnected.
| Algorithm 1 FLH network generation algorithm |
| Input: number of individuals N, number of individuals per layer |
| Output: FLH network interaction matrix |
| //Check if the sum of individuals in layers equals N |
| if sum() is not equal to N then |
| end if |
| Error: Sum of individuals in layers must equal total number of individuals |
| //Create an adjacency matrix |
| Initialize zeros matrix |
| // Populate the FLH adjacency matrix |
| Set Current index |
| for i from 1 to length do |
| for j from Current index to do |
| //Create connections from individuals in higher layers to those in lower layers |
| if i is less than length then |
| for k from to N do |
| Set adjmatrix |
| Set adjmatrix |
| end for |
| end if |
| end for |
| Increment c by |
| end for |
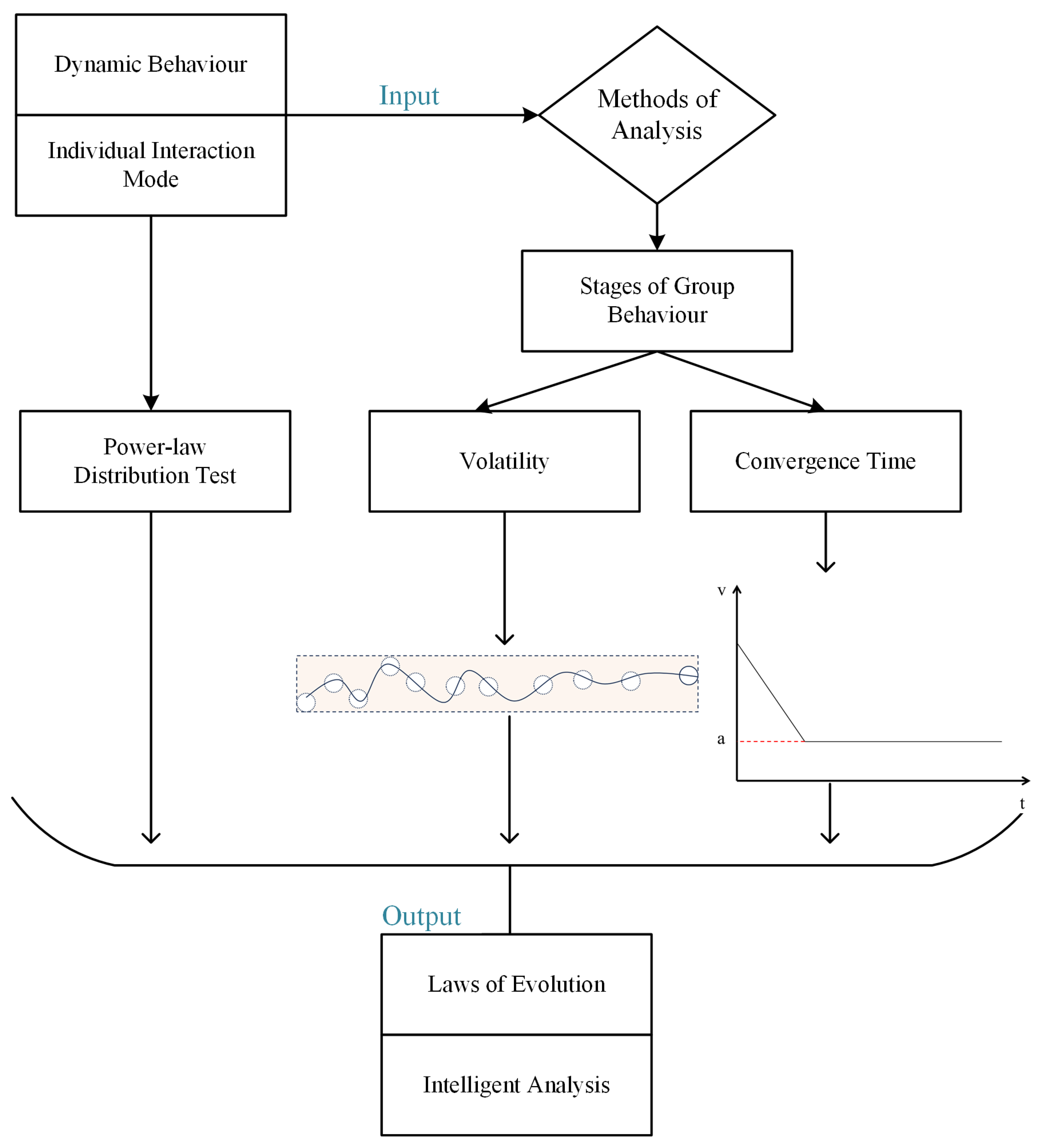
3. Model Building
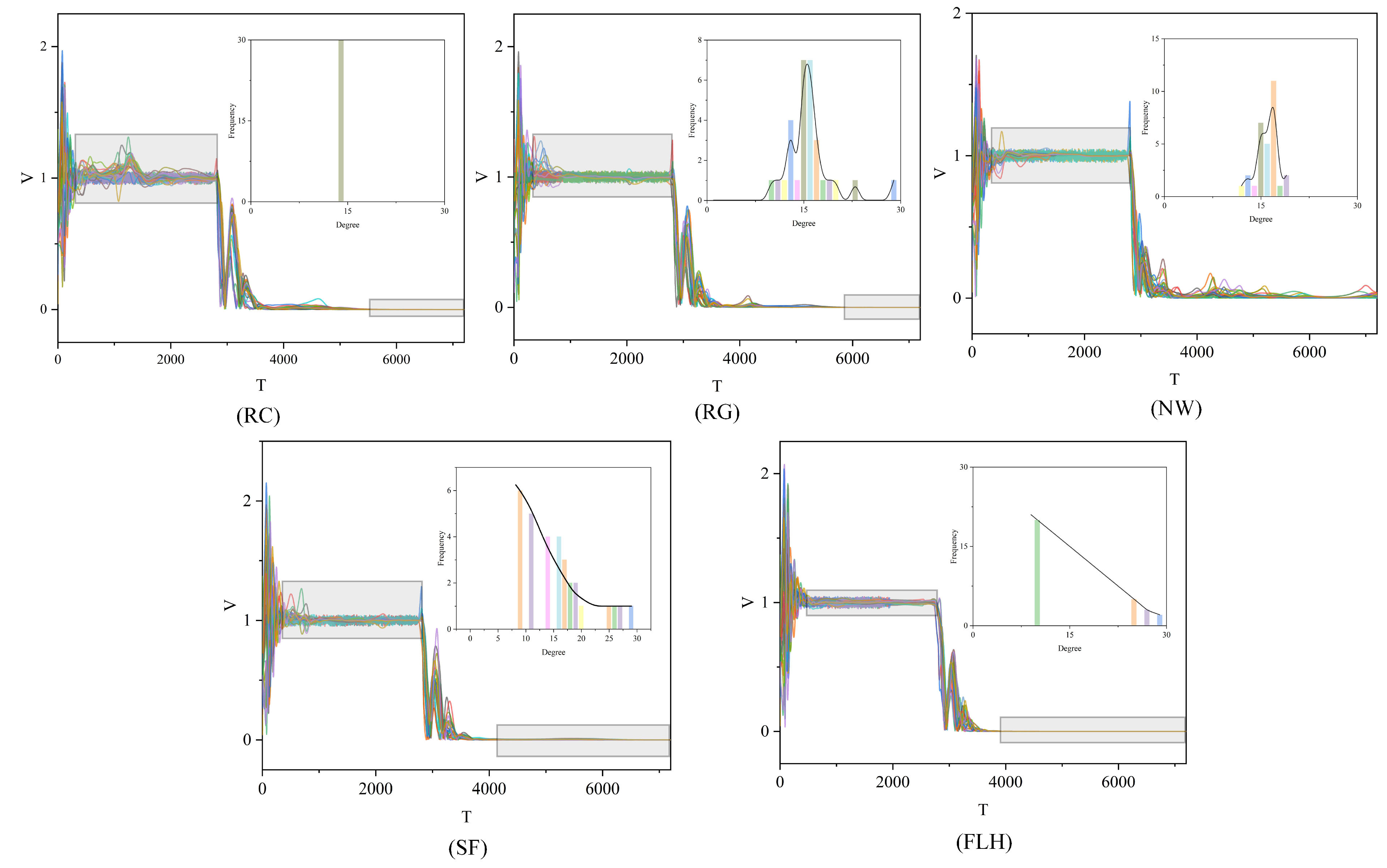
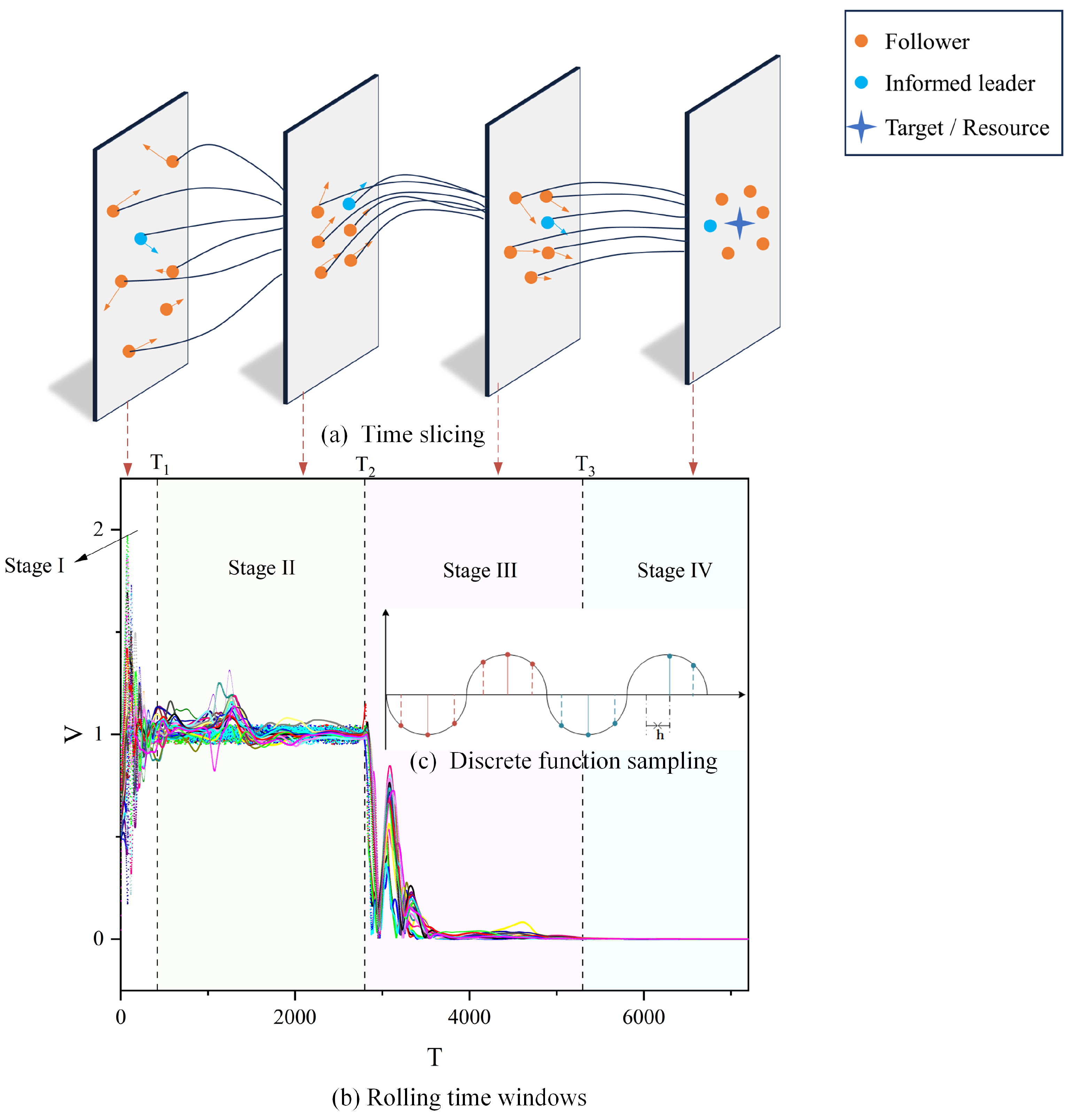
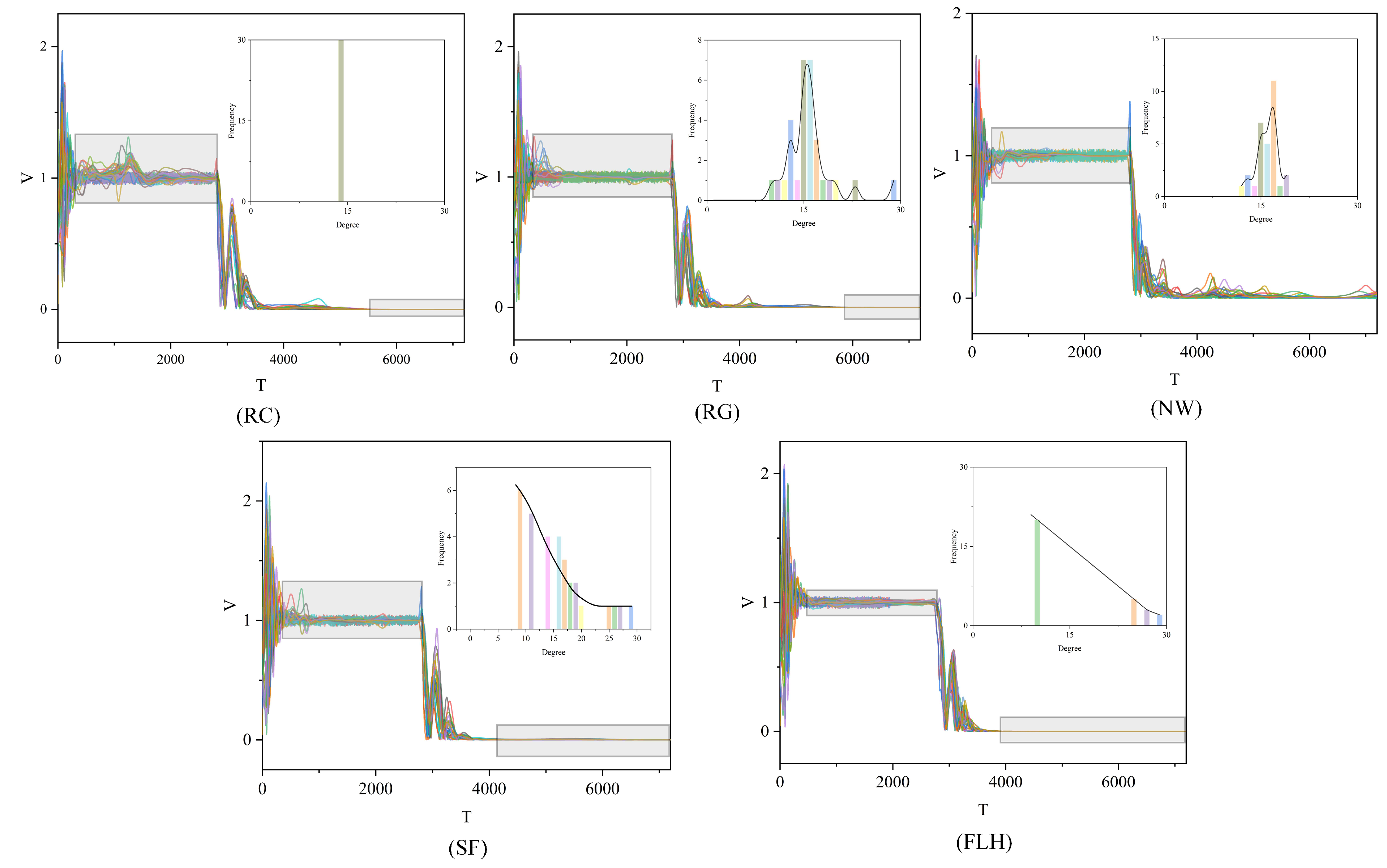
3.1. Stages of Group Behavior and Demonstration
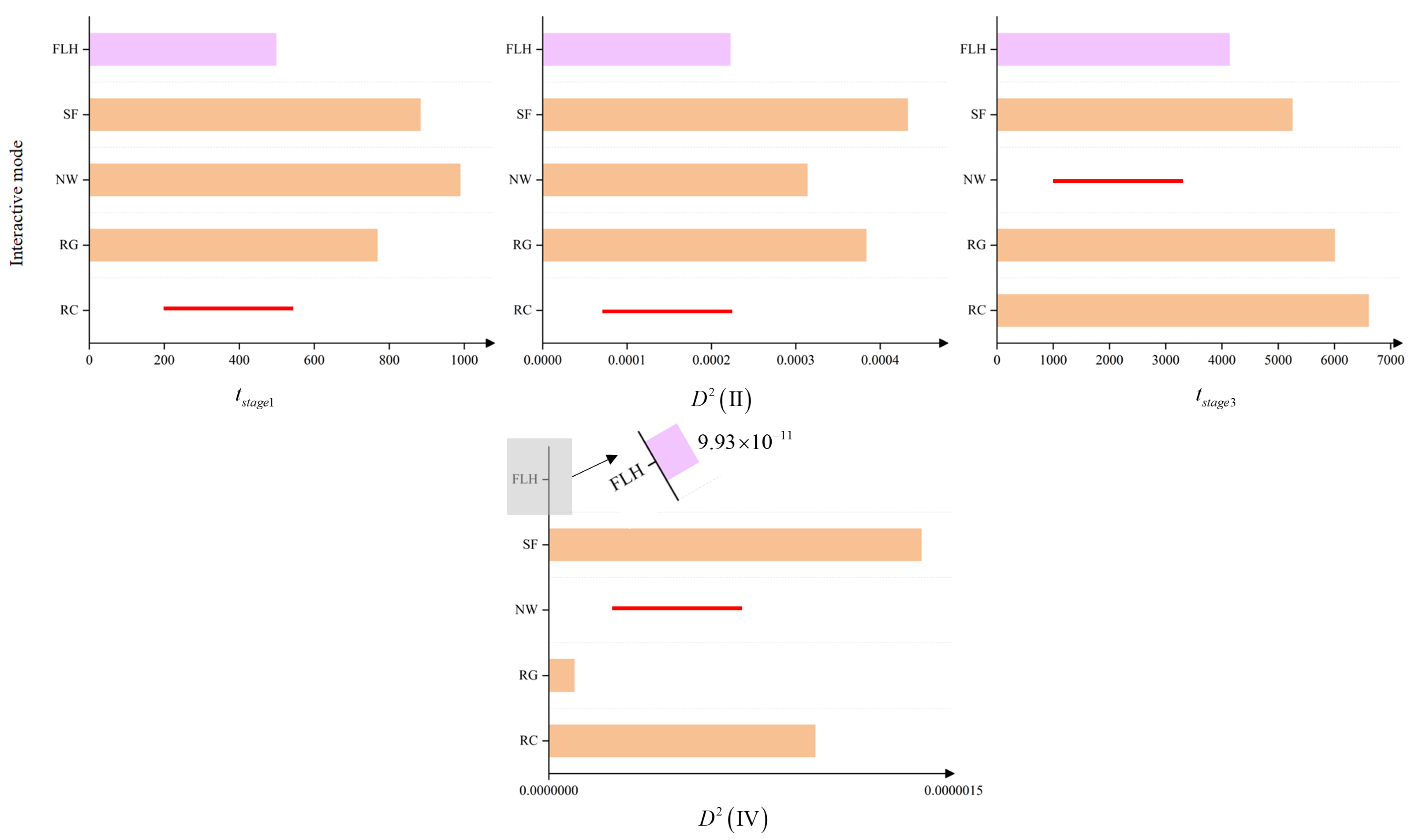
3.2. Metric Performance
3.2.1. Volatility
3.2.2. Convergence Time
3.3. Power-Law Distribution Test
4. Numerical Simulation
4.1. Experimental Design
4.2. Discussion
5. Conclusions
6. Future Research
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CS | Cucker–Smale model |
| RC | Regular Connected Network |
| RG | Random Graph Network |
| NW | Newman–Watts–Strogatz Small-World Network |
| SF | Scale-Free Network |
| FLH | Flock Leadership Hierarchy Network |
| hd | high-degree nodes |
| ld | low-degree nodes |
| IpCf-CS | inter-particle coupling forces to the CS model |
References
- Reynolds, C.W. Flocks, Herds and Schools: A Distributed Behavior Model. ACM SIGGRAPH Comput. Graph. 1987, 21, 25–34. [Google Scholar] [CrossRef]
- Marras, S.; Killen, S.S.; Lindström, J.; Mckenzie, D.J.; Steffensen, J.F.; Domenici, P. Fish swimming in schools save energy regardless of their spatial position. Behav. Ecol. Sociobiol. 2015, 69, 219–226. [Google Scholar] [CrossRef]
- Aoki, I. A Simulation Study on the Schooling Mechanism in Fish. Nihon-Suisan-Gakkai-Shi 1982, 48, 1081–1088. [Google Scholar] [CrossRef]
- Hubbard, S.; Babak, P.; Sigurdsson, S.T.; Magnússon, K.G. A model of the formation of fish schools and migrations of fish. Ecol. Model. 2004, 174, 359–374. [Google Scholar] [CrossRef]
- Zhong, C.; Lou, W.; Lai, Y. A Projection Pursuit Dynamic Cluster Model for Tourism Safety Early Warning and Its Implications for Sustainable Tourism. Mathematics 2023, 11, 4919. [Google Scholar] [CrossRef]
- Alan, P.; Scott, T.J. Can we identify general architectural principles that impact the collective behaviour of both human and animal systems? Philos. Trans. R. Soc. B Biol. Sci. 2018, 373, 20180253. [Google Scholar]
- Huang, S.; Brangwynne, C.P.; Parker, K.K.; Ingber, D.E. Symmetry-breaking in mammalian cell cohort migration during tissue pattern formation: Role of random-walk persistence. Cell Motil. Cytoskelet. 2010, 61, 201–213. [Google Scholar] [CrossRef]
- Yaxley, K.J.; Joiner, K.F.; Abbass, H.A. Drone approach parameters leading to lower stress sheep flocking and movement: Sky shepherding. Sci. Rep. 2021, 11, 7803. [Google Scholar] [CrossRef] [PubMed]
- Hakim, V.; Silberzan, P. Collective cell migration: A physics perspective. Rep. Prog. Physics. Phys. Soc. 2017, 80, 076601. [Google Scholar] [CrossRef]
- Belmonte, J.M.; Thomas, G.L.; Brunnet, L.G.; Almeida, R.M.C.D.; Chate, H. Self-propelled particle model for cell-sorting phenomena. Phys. Rev. Lett. 2008, 100, 248702. [Google Scholar] [CrossRef]
- Rørth, P. Collective guidance of collective cell migration. Trends Cell Biol. 2007, 17, 575–579. [Google Scholar] [CrossRef] [PubMed]
- Wei, X.; Liu, J.C.; Bi, S. Uncertainty quantification and propagation of crowd behaviour effects on pedestrian-induced vibrations of footbridges. Mech. Syst. Signal Process. 2022, 167, 108557. [Google Scholar] [CrossRef]
- Smith, J.; Gavrilets, S.; Mulder, M.; Hooper, P.; Mouden, C.; Nettle, D.; Hauert, C.; Hill, K.; Perry, S.; Pusey, A. Leadership in Mammalian Societies: Emergence, Distribution, Power, and Payoff. Trends Ecol. Evol. 2015, 31, 54–66. [Google Scholar] [CrossRef] [PubMed]
- Dell’Ariccia, G.; Dell’Omo, G.; Wolfer, D.P.; Lipp, H.P. Flock flying improves pigeons’ homing: GPS track analysis of individual flyers versus small groups. Anim. Behav. 2008, 76, 1165–1172. [Google Scholar] [CrossRef]
- Nagy, M.; Akos, Z.; Biro, D.; Vicsek, T. Hierarchical group dynamics in pigeon flocks. Nature 2010, 464, 890. [Google Scholar] [CrossRef]
- Nagy, M.; Vasarhelyi, G.; Pettit, B.; Roberts-Mariani, I.; Vicsek, T.; Biro, D. Context-dependent hierarchies in pigeons. Proc. Natl. Acad. Sci. USA 2013, 110, 13049–13054. [Google Scholar] [CrossRef] [PubMed]
- Flack, A.; Ákos, Z.; Nagy, M.; Vicsek, T.; Biro, D. Robustness of flight leadership relations in pigeons. Anim. Behav. 2013, 86, 723–732. [Google Scholar] [CrossRef]
- Watts, I.; Nagy, M.; Theresa, B.D.P.; Biro, D. Misinformed leaders lose influence over pigeon flocks. Biol. Lett. 2016, 12, 20160544. [Google Scholar] [CrossRef]
- Garland, J.; Berdahl, A.M.; Sun, J.; Bollt, E.M. Anatomy of leadership in collective behaviour. Chaos 2018, 7, 5308. [Google Scholar] [CrossRef]
- Strandburg-Peshkin, A.; Twomey, C.R.; Bode, N.W.F.; Kao, A.B.; Katz, Y.; Ioannou, C.C.; Rosenthal, S.B.; Torney, C.J.; Wu, H.S.; Levin, S.A.A. Visual sensory networks and effective information transfer in animal groups. Curr. Biol. CB 2013, 23, 709–711. [Google Scholar] [CrossRef]
- Reebs, S.G. Can a minority of informed leaders determine the foraging movements of a fish shoal? Anim. Behav. 2000, 59, 403–409. [Google Scholar] [CrossRef]
- Vicsek, T.; Czirók, A.; Ben-Jacob, E.; Cohen, I.; Shochet, O. Novel Type of Phase Transition in a System of Self-Driven Particles. Phys. Rev. Lett. 1995, 75, 1226. [Google Scholar] [CrossRef] [PubMed]
- Jadbabaie, A.; Lin, J.; Morse, A.S. Coordination of groups of mobile autonomous agents using nearest neighbor rules. IEEE Conf. Decis. Control 2002, 3, 2953–2958. [Google Scholar]
- Cucker, F.; Smale, S. Emergent behavior in flocks. IEEE Trans. Autom. Control 2007, 52, 852–862. [Google Scholar] [CrossRef]
- Tunstrøm, K. Determining interaction rules in animal swarms. Behav. Ecol. 2010, 21, 1106–1111. [Google Scholar]
- Lukeman, R.; Li, Y.X.; Edelstein-Keshet, L. Inferring individual rules from collective behavior. Proc. Natl. Acad. Sci. USA 2010, 107, 12576–12580. [Google Scholar] [CrossRef] [PubMed]
- Zhdankin, V.; Sprott, J.C. Simple predator-prey swarming model. Phys. Rev. E Stat. Nonlinear Soft Matter Phys. 2010, 82, 056209. [Google Scholar] [CrossRef]
- Couzin, I.; Krause, J.; Franks, N.; Levin, S. Effective leadership and decision-making in animal groups on the move. Nature 2005, 433, 513–516. [Google Scholar] [CrossRef]
- Guo, H.; Han, J.; Zhang, G. Hopf Bifurcation and Control for the Bioeconomic Predator–Prey Model with Square Root Functional Response and Nonlinear Prey Harvesting. Mathematics 2023, 11, 4958. [Google Scholar] [CrossRef]
- Cucker F, S.S. On the mathematics of emergence. Jpn. J. Math. 2007, 2, 197–227. [Google Scholar] [CrossRef]
- Ha, S.; Liu, J. A simple proof of the Cucker–Smale flocking dynamics and mean-field limit. Commun. Math. Sci. 2009, 7, 297–325. [Google Scholar] [CrossRef]
- Park, J.; Kim, H.; Ha, S. Cucker–Smale Flocking With Inter-Particle Bonding Forces. IEEE Trans. Autom. Control 2010, 55, 2617–2623. [Google Scholar] [CrossRef]
- Dong, J. Flocking under hierarchical leadership with a free-will leader. Int. J. Robust Nonlinear Control 2012, 23, 1891–1898. [Google Scholar] [CrossRef]
- Liang, J.; Qi, M.; Gu, K.; Liang, Y.; Zhang, Z.; Duan, X.J. The structure inference of flocking systems based on the trajectories. Chaos 2022, 32, 101103. [Google Scholar] [CrossRef]
- Chen, G.; Lou, Y.; Wang, L. A Comparative Study on Controllability Robustness of Complex Networks. IEEE Trans. Circuits Syst. II Express Briefs 2019, 66, 828–832. [Google Scholar] [CrossRef]
- Bürgi, H.B. Crystal structures. Acta Crystallogr. Sect. B Struct. Sci. Cryst. Eng. Mater. 2022, 78, 283–289. [Google Scholar] [CrossRef]
- Yin, H.; Huang, X.; Scarpa, F.; Wen, G.; Chen, Y.; Zhang, C. In-plane crashworthiness of bio-inspired hierarchical honeycombs. Compos. Struct. 2018, 192, 516–527. [Google Scholar] [CrossRef]
- Lee, S.; Cha, Y.; Han, S.; taek Hyun, C. Application of Association Rule Mining and Social Network Analysis for Understanding Causality of Construction Defects. Sustainability 2019, 11, 618. [Google Scholar] [CrossRef]
- Dragicevic, A.Z.; Gurtoo, A. Stochastic control of ecological networks. J. Math. Biol. 2022, 85, 7. [Google Scholar] [CrossRef]
- Brinkley, C. The Small World of the Alternative Food Network. Sustainability 2018, 10, 2921. [Google Scholar] [CrossRef]
- Glazier, V.E.; Krysan, D.J. Transcription factor network efficiency in the regulation of Candida albicans biofilms: It is a small world. Curr. Genet. 2018, 64, 883–888. [Google Scholar] [CrossRef] [PubMed]
- Aparicio, S.; Villazón-Terrazas, J.; Álvarez, G. A Model for Scale-Free Networks: Application to Twitter. Entropy 2015, 17, 5848–5867. [Google Scholar] [CrossRef]
- Kim, S.Y.; Lim, W. Cluster burst synchronization in a scale-free network of inhibitory bursting neurons. Cogn. Neurodynamics 2018, 14, 69–94. [Google Scholar] [CrossRef] [PubMed]
- Watts, I.; Pettit, B.; Nagy, M.; de Perera, T.B.; Biro, D. Lack of experience-based stratification in homing pigeon leadership hierarchies. R. Soc. Open Sci. 2016, 3, 150518. [Google Scholar] [CrossRef] [PubMed]
- Zhu, X.; Huang, J. SpreadRank: A Novel Approach for Identifying Influential Spreaders in Complex Networks. Entropy 2023, 25, 637. [Google Scholar] [CrossRef] [PubMed]
- Xu, X.; Small, M.; Pérez-Barbería, F.J. Uncovering interaction patterns of multi-agent collective motion via complex network analysis. In Proceedings of the 2014 IEEE International Symposium on Circuits and Systems (ISCAS), Melbourne, VIC, Australia, 1–5 June 2014; pp. 2213–2216. [Google Scholar]
- Zhang, Y.; Chen, F.; Rohe, K. Correction to: Social Media Public Opinion as Flocks in a Murmuration: Conceptualizing and Measuring Opinion Expression on Social Media. J. Comput. Mediat. Commun. 2022, 27, zmab021. [Google Scholar] [CrossRef]
- Wang, X.; Lu, Y.; Shi, C.; Wang, R.; Cui, P.; Mou, S. Dynamic Heterogeneous Information Network Embedding With Meta-Path Based Proximity. IEEE Trans. Knowl. Data Eng. 2022, 34, 1117–1132. [Google Scholar] [CrossRef]
- Ouellette, N. A physics perspective on collective animal behavior. Phys. Biol. 2022, 19, 021004. [Google Scholar] [CrossRef] [PubMed]
- Jeon, J.; Kim, G. Valuation of Commodity-Linked Bond with Stochastic Convenience Yield, Stochastic Volatility, and Credit Risk in an Intensity-Based Model. Mathematics 2023, 11, 4969. [Google Scholar] [CrossRef]
- Blythe, D.A.J.; Nikulin, V.V.; Müller, K.R. Robust Statistical Detection of Power-Law Cross-Correlation. Sci. Rep. 2016, 6, 27089. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Meaning | Value | Symbol | Meaning | Value |
|---|---|---|---|---|---|
| N | Number of individuals | 30 | Coordination parameter | 0.2/0.5/1 | |
| Coupling strength | 10 | Collision coefficient | 10 | ||
| Anti-collision upper boundary | 100 | Anti-collision lower boundary | 3 | ||
| Velocity upper bound | 5 | Acceleration upper bound | 1 | ||
| R | Maximum radius of communication | 50 | t | Time | 360 |
| D | Target position | (100,100) | Initial position | near (0,0) | |
| Number of leaders | 5 | h | Discretized step size | 0.05 | |
| Velocity threshold | c | Acceptable range of volatility | 0.2/ | ||
| Volatility threshold |
| Network Topology | Power Law Distribution | ||||
|---|---|---|---|---|---|
| RC | 1370 | 5271 | —— | ||
| RG | 871 | 5720 | —— | ||
| NW | 640 | —— | —— | —— | |
| SF | 802 | 3821 | Obey | ||
| FLH | 467 | 3672 | Obey |
| Network Topology | ||||
|---|---|---|---|---|
| RC | 2154 | 7061 | ||
| RG | 726 | 5160 | ||
| NW | 881 | —— | —— | |
| SF | 292 | 4261 | ||
| FLH | 253 | 4157 |
| Network Topology | ||||
|---|---|---|---|---|
| RC | 1387 | 6206 | ||
| RG | 226 | 6250 | ||
| NW | 241 | —— | —— | |
| SF | 230 | 4541 | ||
| FLH | 177 | 3999 |
| Network Topology | ||||
|---|---|---|---|---|
| RC | —— | —— | 6613 | |
| RG | 769 | 6010 | ||
| NW | 990 | —— | —— | |
| SF | 884 | 5258 | ||
| FLH | 499 | 4140 |
| Network Topology | ||||
|---|---|---|---|---|
| RC | 1671 | 5036 | ||
| RG | 1098 | 4084 | ||
| NW | 986 | —— | —— | |
| SF | 861 | 3984 | ||
| FLH | 489 | 3658 |
| Network Topology | ||||
|---|---|---|---|---|
| RC | 1532 | 4494 | ||
| RG | 1674 | 5216 | ||
| NW | —— | —— | 5284 | |
| SF | 1144 | 4819 | ||
| FLH | 857 | 4574 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, Y.; Zhu, J.; Li, X.; Han, X.; Tan, W.; Huangpeng, Q.; Duan, X. Research on Group Behavior Modeling and Individual Interaction Modes with Informed Leaders. Mathematics 2024, 12, 1160. https://doi.org/10.3390/math12081160
Fu Y, Zhu J, Li X, Han X, Tan W, Huangpeng Q, Duan X. Research on Group Behavior Modeling and Individual Interaction Modes with Informed Leaders. Mathematics. 2024; 12(8):1160. https://doi.org/10.3390/math12081160
Chicago/Turabian StyleFu, Yude, Jing Zhu, Xiang Li, Xu Han, Wenhui Tan, Qizi Huangpeng, and Xiaojun Duan. 2024. "Research on Group Behavior Modeling and Individual Interaction Modes with Informed Leaders" Mathematics 12, no. 8: 1160. https://doi.org/10.3390/math12081160
APA StyleFu, Y., Zhu, J., Li, X., Han, X., Tan, W., Huangpeng, Q., & Duan, X. (2024). Research on Group Behavior Modeling and Individual Interaction Modes with Informed Leaders. Mathematics, 12(8), 1160. https://doi.org/10.3390/math12081160