1. Introduction
Under specific circumstances, nonlinear controllers offer notable advantages compared to linear controllers. This is particularly evident when dealing with nonlinear plant dynamics and/or system measurements [
1,
2,
3,
4], nonadditive or non-Gaussian plant/measurement disturbances, nonquadratic performance measures [
5,
6,
7,
8,
9], uncertain plant models [
10,
11,
12], or constrained control signals/state amplitudes [
13,
14]. In the work by [
15], the current status of deterministic continuous-time nonlinear-nonquadratic optimal control problems is presented, emphasizing the use of Lyapunov functions for stability and optimality (see [
15,
16,
17] and the references therein).
Expanding on the findings of [
15,
16,
18,
19], this paper introduces a framework for analyzing and designing feedback controllers for nonlinear stochastic dynamical systems. Specifically, it addresses a feedback stochastic optimal control problem with a nonlinear-nonquadratic performance measure over an infinite horizon. The key is the connection between the performance measure and a Lyapunov function, ensuring asymptotic stability in probability for the nonlinear closed-loop system. The framework establishes the groundwork for extending linear-quadratic control to nonlinear-nonquadratic problems in stochastic dynamical systems.
The focus lies on the role of the Lyapunov function in ensuring stochastic stability and its seamless connection to the steady-state solution of the stochastic Hamilton–Jacobi–Bellman equation, characterizing the optimal nonlinear feedback controller. To simplify the solution of the stochastic steady-state Hamilton–Jacobi–Bellman equation, the paper adopts an approach of parameterizing a family of stochastically stabilizing controllers. This corresponds to addressing an inverse optimal stochastic control problem [
20,
21,
22,
23,
24,
25,
26].
The inverse optimal control design approach constructs the Lyapunov function for the closed-loop system, serving as an optimal value function. It achieves desired stability margins, particularly for nonlinear inverse optimal controllers minimizing a meaningful nonlinear-nonquadratic performance criterion. The paper derives stability margins for optimal and inverse optimal nonlinear stochastic feedback regulators, considering gain, sector, and disk margin guarantees. These guarantees are obtained for nonlinear stochastic dynamical systems controlled by nonlinear optimal and inverse optimal Hamilton–Jacobi–Bellman controllers.
Furthermore, the paper establishes connections between stochastic stability margins, stochastic meaningful inverse optimality, and stochastic dissipativity [
27,
28], showcasing the equivalence between stochastic dissipativity and optimality for stochastic dynamical systems. Specifically, utilizing extended Kalman–Yakubovich–Popov conditions characterizing stochastic dissipativity, our optimal feedback control law satisfies a return difference inequality predicated on the infinitesimal generator of a controlled Markov diffusion process, connecting optimality to stochastic dissipativity with a specific quadratic supply rate. This integrated framework provides a comprehensive understanding of optimal nonlinear control strategies for stochastic dynamical systems, encompassing stability, optimality, and dissipativity considerations.
2. Mathematical Preliminaries
We start by reviewing some basic results on nonlinear stochastic dynamical systems [
29,
30,
31,
32]. First, however, we require some definitions. A
sample space is the set of possible outcomes of an experiment. Given a sample space
, a
-
algebra on
is a collection of subsets of
such that
, if
, then
, and if
, then
. The pair (
) is called a
measurable space and the
probability measure defined on (
) is a function
such that
. Furthermore, if
and
,
, then
. The triple (
) is called a
probability space. The subsets of
belonging to
are called
-
measurable sets. A probability space is
complete if every subset of every null set is measurable.
The -algebra generated by the open sets in , denoted by , is called the Borel σ-algebra and the elements of are called Borel sets. Given the probability space (), a random variable is a real-valued mapping such that for all Borel sets . That is, x is -measurable. A stochastic process is a collection of random variables defined on the complete probability space indexed by the set that take values on a common measurable space . Since , we say that is a continuous-time stochastic process.
Occasionally, we write for to denote the explicit dependence of the random variable on the outcome . For every fixed time , the random variable assigns a vector to every outcome , and for every fixed , the mapping generates a sample path of the stochastic process , where for convenience we write to denote the stochastic process . In this paper, and .
A
filtration on
is a collection of sub-
-fields of
, indexed by
, such that
,
. A filtration is
complete if
contains the
-negligible sets. The stochastic process
is
progressively measurable with respect to
if, for every
, the map
defined on
is
-measurable, where
denotes the Borel
-algebra on
. The stochastic process
is said to be
adapted with respect to
, or simply
-adapted, if
is
-measurable for every
. An adapted stochastic process with right continuous (or left continuous) sample paths is progressively measurable [
33]. We say that a stochastic process satisfies the
Markov property if the conditional probability distribution of the future states of the stochastic process depends only on the present state.
The stochastic process
is a
martingale with respect to the filtration
if it is
-adapted,
, and
, where
denotes expectation and
denotes conditional expectation. If we replace the equality in
with “≤" (respectively, “≥"), then
is a
supermartingale (respectively,
submartingale). For an additional discussion on stochastic processes, filtrations, and martingales, see [
33].
In this paper, we consider controlled stochastic dynamical systems
of the form
where (
1) is a stochastic differential equation and (2) is an output equation. The stochastic processes
,
, and
represent the system state, input, and output, respectively. Here,
is a set of
admissible inputs that contains the input processes
that can be applied to the system,
is a random system initial condition vector, and
is a
d-dimensional Brownian motion process. For every
, the random variables
,
, and
take values in the state space
, the control space
, and the output space
, respectively. The measurable mappings
,
, and
are known as the system drift, diffusion, and output functions.
The stochastic differential Equation (
1) is interpreted as a way of expressing the integral equation
where the first integral in (
3) is a Lebesgue integral and the second integral is an Itô integral [
34]. When considering processes whose initial condition is a fixed deterministic point rather than a distribution, we will find it convenient to introduce the notation
to denote the solution process at time
t when the initial condition at time
s is the fixed point
almost surely. Similarly,
and
denote probability and expected value, respectively, given that the initial condition
is the fixed point
almost surely.
Let
be a fixed complete filtered probability space,
be a
-adapted Brownian motion,
be a
-valued
-progressively measurable input process, and
be a
-measurable initial condition. A solution to (
1) with input
is a
-valued
-adapted process
with continuous sample paths such that the integrals in (
3) exist and (
3) holds almost surely (a.s.) for all
. For a Brownian motion disturbance, input process, and initial condition given in a prescribed probability space, the solution to (
3) is known as a strong solution [
35]. In this paper, we focus on strong solutions, and we will simply use the term “solution” to refer to a strong solution. A solution to (
1) is
unique if for any two solutions
and
that satisfy (
1),
for all
almost surely.
We assume that every
is a
-valued Markov control process. An input process
is a
Markov control process if there exists a function
such that
. Note that the class of Markov controls encompasses both time-varying inputs (i.e., possibly open-loop control input processes) as well as state-dependent inputs (i.e., possibly a
state feedback control input , where
is a
feedback control law). If
is a Markov control process, then the stochastic differential Equation (
1) is an Itô diffusion, and if its solution is unique, then the solution is a
Markov process.
For an Itô diffusion system with solution
, the (infinitesimal) generator
of
is an operator acting on the continuous function
and is defined as ([
31])
The set of functions
for which the limit in (
4) exists is denoted by
. If
has compact support, where
denotes the space of two-times continuously differentiable functions on
, then
and
, where
and where we write
for the gradient of
V at
x and
for the Hessian of
V at
x.
Note that the differential operator
introduced in (
5) is defined for every
and it is characterized by the system drift and diffusion functions. We will refer to the differential operator
as the (infinitesimal) generator of the system
. However, if discontinuous control inputs in the state variables are considered, then the concept of the
extended generator [
36] should be used.
If
, then it follows from
Itô’s formula [
35] that the stochastic process
satisfies
If the terms appearing in (
6) are integrable and the Itô integral in (
6) is a martingale, then it follows from (
6) that
The next result is standard and establishes existence and uniqueness of solutions for the controlled Itô diffusion system (
1).
Theorem 1 ([
32])
. Consider the stochastic dynamical system (1) with initial condition such that . Let be a Markov control process given by , such that the following conditions hold:- (i)
Local Lipschitz continuity.
For every , there exists a constant such thatfor every with , and every .- (ii)
Linear growth.
There exists a constant such that, for all and ,
Then, there exists a unique solution to (1) with input . Furthermore, Assumption 1. For the remainder of the paper we assume that the conditions for existence and uniqueness given in Theorem 1 are satisfied for the system (1) and (2). 3. Stability Theory for Stochastic Dynamical Systems
Given a feedback control law
, the
closed-loop system (
1) takes the form
where, for convenience, we have defined the closed-loop drift function
and we have omitted the dependence of
D on its second parameter so that
. In this case, the infinitesimal generator of the closed-loop system (
11) is given by
Next, we define the notion of stochatic stability for the closed loop system (
11). An
equilibrium point of (
11) is a point
such that
and
. If
is an equilibrium point of (
11), then the constant stochastic process
is a solution of (
11) with initial condition
. The following definition introduces several notions of stability in probability for the equilibrium solution
of the stochastic dynamical system (
11). Here, the initial condition
is assumed to be a constant, and hence, whenever we write
we mean that
is a constant vector. It is important to note that if we assume that
is a
random vector, then we replace
with
almost surely in Definition 1. As shown in ([
32], p. 111) this is without loss of generality in addressing stochastic stability of an equilibrium point.
Definition 1 ([
29,
32])
. The equilibrium solution to (11) is Lyapunov stable in probability
if, for every ,Equivalently, the equilibrium solution to (11) is Lyapunov stable in probability if, for every and , there exists such that, for all , The equilibrium solution to (11) is asymptotically stable in probability
if it is Lyapunov stable in probability andEquivalently, the equilibrium solution to (11) is asymptotically stable in probability if it is Lyapunov stable in probability and, for every , there exists such that if , then ( The equilibrium solution to (11) is globally asymptotically stable in probability
if it is Lyapunov stable in probability and, for all , ( The equilibrium solution to (11) is exponentially
p-stable in probability
if there exist scalars , and , and such that if , thenIf, in addition, (18) holds for all , then the equilibrium solution to (11) is globally exponentially
p-stable in probability
. Finally, if , we say that the equilibrium solution to (11) is globally exponentially mean square stable in probability.
We now provide sufficient conditions for local and global asymptotic stability in probability for the nonlinear stochastic dynamical system (
11).
Theorem 2 ([
29])
. Let be an open subset containing the point . Consider the nonlinear stochastic dynamical system (11) and assume that there exists a two-times continuously differentiable function such thatThe equilibrium solution to (11) is then Lyapunov stable in probability. If, in addition,then the equilibrium solution to (11) is asymptotically stable in probability. Finally, if, in addition, and V is radially unbounded, then the equilibrium solution to (11) is globally asymptotically stable in probability. Finally, the next result gives a Lyapunov theorem for global exponential stability in probability.
Theorem 3 ([
29])
. Consider the nonlinear stochastic dynamical system (11) and assume that there exist a two-times continuously differentiable function and scalars α, β, , and such thatThen the equilibrium solution to (11) is globally exponentially p-stable in probability. 6. Optimal Nonlinear Feedback Control for Stochastic Systems
In this section, we consider a control problem involving a notion of optimality with respect to a nonlinear-nonquadratic cost functional. We use the results developed in Theorem 6 to characterize optimal feedback controllers that guarantee closed-loop global stabilization in probability. Specifically, sufficient conditions for optimality are given in a form that corresponds to a steady-state version of the stochastic Hamilton–Jacobi–Bellman equation. For the following result, let and be such that and .
Theorem 7. Consider the nonlinear stochastic dynamical system given by (1) with nonlinear-nonquadratic performance measurewhere is the solution to (1) with control input . Furthermore, assume that there exists a two-times continuously differentiable, radially unbounded function , and a feedback control law such thatwhereThen, with the feedback control , the zero solution of the closed-loop system (11) is globally asymptotically stable in probability, andIn addition, the feedback control minimizes (45) in the sense thatwhere denotes the set of controllers given bywhere and . Proof. Global asymptotic stability in probability is a direct consequence of (
46)–(49) by applying Theorem 6 to the closed-loop system (
11). Furthermore, using (50), (
53) is a restatement of (37) as applied to the closed-loop system.
To show that
, note that (49) and (50) imply that
. Thus,
Now, using an analogous argument as in the proof of Theorem 6, it follows that
for
, and hence,
.
Next, let
, and note that, by Itô’s lemma [
31],
Now, it can be shown that the stochastic integral in (
57) is a martingale using a similar argument as the one given in the proof of Theorem 6. Hence,
where
exists since
and (
10) holds. Next, taking the limit as
yields
Since
, the control law satisfies
, and hence, it follows from (
59) that
Now, combining (51) and (
60) yields
Next, note that, for every
,
and, since
,
. Thus, it follows from the dominated convergence theorem [
39] that
Finally, combining (
53), (
61), and (
63) yields
which proves (
54). □
Note that (50) is the steady-state version of the stochastic Hamilton–Jacobi–Bellman equation. To see this, recall that the
stochastic Hamilton–Jacobi–Bellman equation is given by
which characterizes the optimal control for stochastic time-varying systems on a finite or infinite time interval [
30]. For infinite horizon time-invariant systems,
, and hence, (
65) collapses to (50) and (51), which guarantee optimality with respect to the set of admissible controllers
. Note that an explicit characterization of the set
is not required and the optimal stabilizing
feedback control law
is independent of the initial condition
.
In order to ensure global asymptotic stability in probability of the closed-loop system (
11), Theorem 7 requires that
V satisfy (
46), (47), and (49), which implies that
V is a Lyapunov function for the closed-loop system (
11). However, for optimality
V need not satisfy (
46), (47), and (49). Specifically, if
V is a two-times continuously differentiable function such that
and
, then (50) and (51) imply (
53) and (
54). It is important to note here that, unlike deterministic theory ([
16], p. 857), to ascertain that a control is optimal we require the additional
transversality condition appearing in (
55); see ([
40], p. 337), ([
41], p. 125), and ([
42], p. 139) for further details.
Even though for an optimal controller
the transversality condition in (
55) is satisfied, the transversality condition involves a sample path dependent condition that can be difficult to verify for an arbitrary control input
. The next theorem circumvents this problem by requiring additional restrictions on the cost integrand
L and the Lyapunov function
V.
Theorem 8. Consider the nonlinear stochastic dynamical system given by (1) with the nonlinear-nonquadratic performance measure (45) where satisfiesfor some positive constants γ and . Assume that there exist a two-times continuously differentiable function and a control law such that (48), (50), and (51) hold and, for positive constants α and β,Then, with the feedback control , the zero solution of the closed-loop system (11) is globally exponentially p-stable in probability and (53) holds. In addition, the feedback control minimizes (45) in the sense thatwhere denotes the set of controllers given byand . Proof. Global exponential
p-stability in probability is a direct consequence of (
66), (
67), and (50) by applying Theorem 3 to the closed-loop system (
11). To show (
53), (
68), and
, first note that Theorem 7 holds. Therefore, we need only show that with (
66) and (
67),
. That is, any input
with finite cost (and hence, belonging to
) automatically satisfies the transversality condition (and hence, belongs to
).
Assume that (
66) and (
67) hold. Note that
is immediate. To show
, let
and
. Since
,
and hence, it follows from the dominated convergence theorem [
39] that
Furthermore, by Tonelli’s theorem [
37],
Combining (
66) and (
70)–(
72) we obtain
Now, using Lemma 5.7 of [
29], it follows that
which, combined with (
67), yields
Hence,
, which implies
. Thus,
. □
Next, we specialize Theorem 8 to linear stochastic dynamical systems and provide connections to the stochastic optimal linear-quadratic regulator problem with multiplicative noise. For the following result, let , , , and let and be given positive definite matrices.
Corollary 2. Consider the linear controlled stochastic dynamical system with multiplicative noise given byand with quadratic performance measureFurthermore, assume that there exists a positive-definite matrix such thatThen, with the feedback control , the zero solution to (76) is globally exponentially mean-square stable in probability andFurthermore,where is the set of controllers defined in (69) for (76) and . Proof. The result is a direct consequence of Theorem 8 with
,
,
, and
. Specifically, (
66) is satisfied with
and
. Moreover,
V is a two-times continuously differentiable function that satisfies
and (
67) with
,
, and
. Furthermore, condition (48) is trivially satisfied. Next, it follows from (
78) that
, showing that (50) holds. Finally,
so that all of the conditions of Theorem 8 are satisfied. □
The optimal feedback control law in Corollary 2 is derived using the properties of H as defined in Theorem 7. Specifically, since it follows that . Now, gives the unique global minimum of H. Hence, since minimizes it follows that satisfies or, equivalently, .
7. Inverse Optimal Stochastic Control
In this section, we specialize Theorem 7 to systems that are affine in the control. Specifically, we devise nonlinear feedback controllers within a stochastic optimal control framework, aiming to minimize a nonlinear-nonquadratic performance criterion. This is achieved by selecting the controller in such a way that the mapping of the infinitesimal generator of the Lyapunov function is negative definite along the sample trajectories of the closed-loop system. We also establish sufficient conditions for the existence of asymptotically stabilizing solutions (in probability) to the stochastic Hamilton–Jacobi–Bellman equation. Consequently, these findings present a set of globally stabilizing controllers, parameterized by the minimized cost functional.
The controllers developed in this section are based on an inverse optimal stochastic control problem [
20,
21,
22,
23,
24,
25,
26]. To simplify the solution of the stochastic steady-state Hamilton–Jacobi–Bellman equation, we do not attempt to minimize a
given cost functional. Instead, we parameterize a family of stochastically stabilizing controllers that minimize a
derived cost functional, offering flexibility in defining the control law. The performance integrand explicitly depends on the nonlinear system dynamics, the Lyapunov function for the closed-loop system, and the stabilizing feedback control law. This coupling is introduced through the stochastic Hamilton–Jacobi–Bellman equation. Therefore, by adjusting parameters in the Lyapunov function and the performance integrand, the proposed framework can characterize a class of globally stabilizing controllers in probability, meeting specified constraints on the closed-loop system response.
Consider the nonlinear stochastic affine in the control dynamical system given by
where
satisfies
,
, and
satisfies
. Furthermore, we consider performance integrands
L of the form
where
, and
, and where
denotes the set of
positive definite matrices, so that (
45) becomes
Theorem 9. Consider the nonlinear controlled affine stochastic dynamical system (81) with performance measure (83). Assume that there exists a two-times continuously differentiable, radially unbounded function and a function such thatThen the zero solution of the closed-loop system is globally asymptotically stable in probability with the feedback control lawand the performance measure (83), withis minimized in the sense thatFinally, Proof. The result is a direct consequence of Theorem 7 with
,
, and
. Specifically, with (
82) the Hamiltonian has the form
Now, the feedback control law (
90) is obtained by setting
. With (
90), it follows that (
84), (85), and (88) imply (
46), (47), and (49), respectively. Next, since
V is two-times continuously differentiable and
is a local minimum of
V, it follows that
, and hence, since by assumption
, it follows that
, which implies (48). Next, with
given by (
91) and
given by (
90), (50) holds. Finally, since
and
is positive definite for all
, condition (51) holds. The result now follows as a direct consequence of Theorem 7. □
Note that (88) is equivalent to
with
given by (
90). Furthermore, conditions (
84), (85), and (
94) ensure that
V is a Lyapunov function for the closed-loop system (
89). As outlined in [
16], it is crucial to acknowledge that the function
present in the integrand of the performance measure (
82) is a variable function of
constrained by conditions (86) and (88). Therefore,
offers versatility in the selection of the control law.
With
given by (
91) and
given by (
90),
L is given by
Since
,
, the first term on the right-hand side of (95) is nonnegative, whereas (
94) implies that the second, third, and fourth terms collectively are nonnegative. Thus, it follows that
which shows that
L may be negative. As a result, there may exist a control input
for which the performance measure
is negative. However, if the control
is a regulation controller, that is,
, then it follows from (
92) and (
93) that
Furthermore, in this case, substituting
into (95) yields
which, by (
94), is positive.
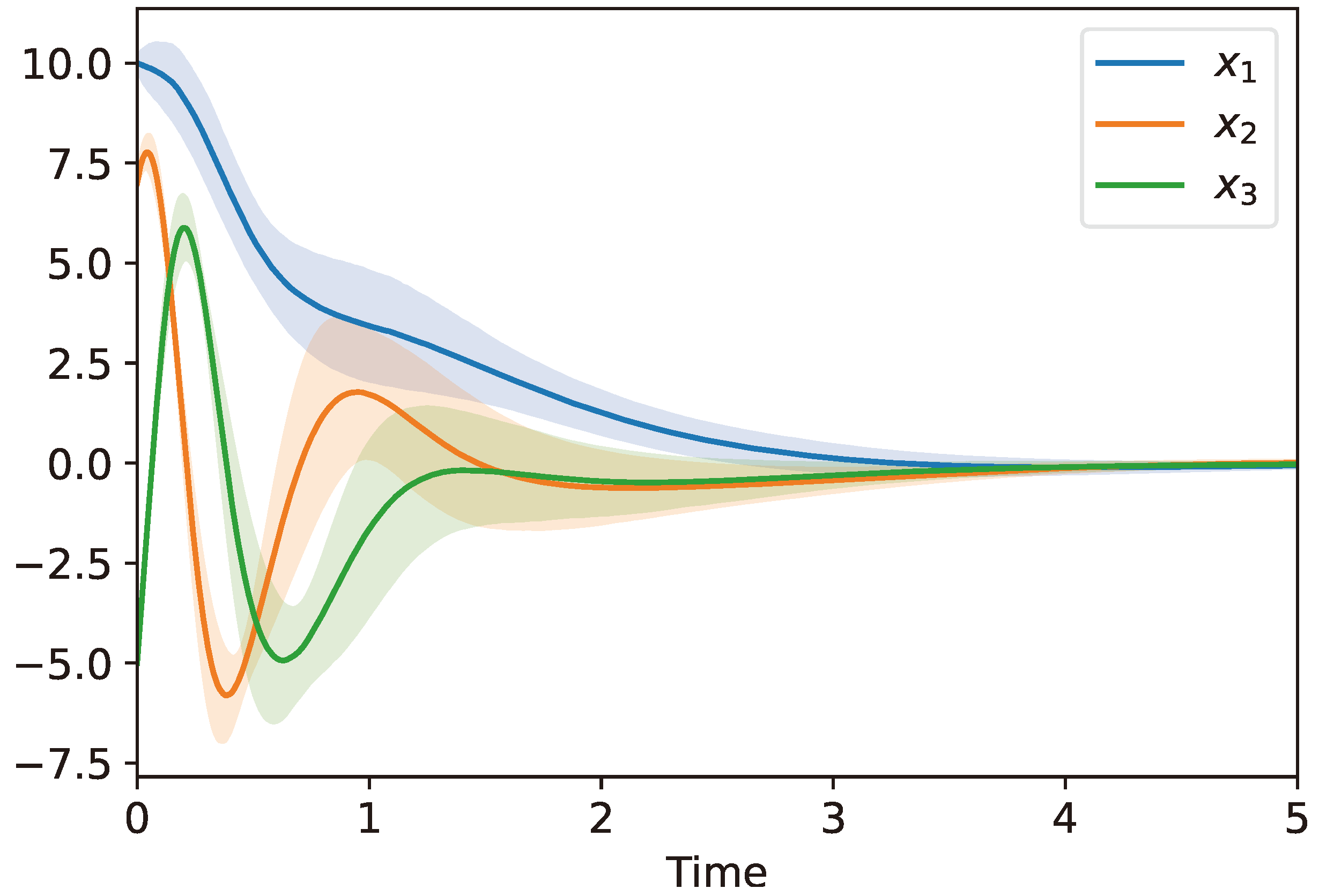
Example 1. To illustrate the utility of Theorem 9, we showcase an example involving global stabilization of a stochastic version of the Lorentz equations [43]. These equations model fluid convection and are known to exhibit chaotic behavior. To construct inverse optimal controllers for the controlled Lorentz stochastic dynamical system consider the systemwhere , and . Note that (99)–(101) can be written in the form of (81) with In order to design an inverse optimal control law for the controlled Lorentz stochastic dynamical system (99)–(101) consider the quadratic Lyapunov function candidate given bywhere and . Now, letting , , , , and , where , it follows thatsatisfies (88); that is,Hence, the feedback control law given by (90) globally stabilizes the controlled Lorentz dynamical system (99)–(101). Furthermore, the performance functional (83), withis minimized in the sense of (92). Figure 1 shows the mean along with the standard deviation of 1000 system sample paths with parameters , , and . ▵
The next theorem is similar to Theorem 9 and is included here as it provides the basis for our stability margin results given in the next sections.
Theorem 10. Consider the nonlinear controlled affine stochastic dynamical system (81) with performance measure (83). Assume that there exists a two-times continuously differentiable, radially unbounded function such thatThen the zero solution of the closed-loop systemis globally asymptotically stable in probability with the feedback control lawand the performance functional (83) is minimized in the sense thatFinally, Proof. The proof is identical to the proof of Theorem 9 and, hence, is omitted. □
8. Relative Stability Margins for Optimal Nonlinear Stochastic Regulators
In this section, we establish relative stability margins for both optimal and inverse optimal nonlinear stochastic feedback regulators. Specifically, we derive sufficient conditions ensuring gain, sector, and disk margin guarantees for nonlinear stochastic dynamical systems under the control of nonlinear optimal and inverse optimal Hamilton–Jacobi–Bellman controllers. These controllers aim to minimize a nonlinear-nonquadratic performance criterion that includes cross-weighting terms. In the scenario where the cross-weighting term in the performance criterion is omitted, our findings align with the gain, sector, and disk margins derived for the deterministic optimal control problem outlined in [
25].
Alternatively, by retaining the cross-terms in the performance criterion and specializing the optimal nonlinear-nonquadratic problem to a stochastic linear-quadratic problem featuring a multiplicative noise disturbance, our results recover the corresponding gain and phase margins for the deterministic linear-quadratic optimal control problem as presented in [
44]. Despite the observed degradation of gain, sector, and disk margins due to the inclusion of cross-weighting terms, the added flexibility afforded by these terms enables the assurance of optimal and inverse optimal nonlinear controllers that can exhibit superior transient performance as compared to meaningful inverse optimal controllers.
To develop relative stability margins for nonlinear stochastic regulators consider the nonlinear stochastic dynamical system
given by
where
satisfies
,
,
satisfies
, and
is an admissible feedback controller such that
is globally asymptotically stable in probability with
, with a nonlinear-nonquadratic performance criterion
where
,
, and
are given such that
,
, and
.
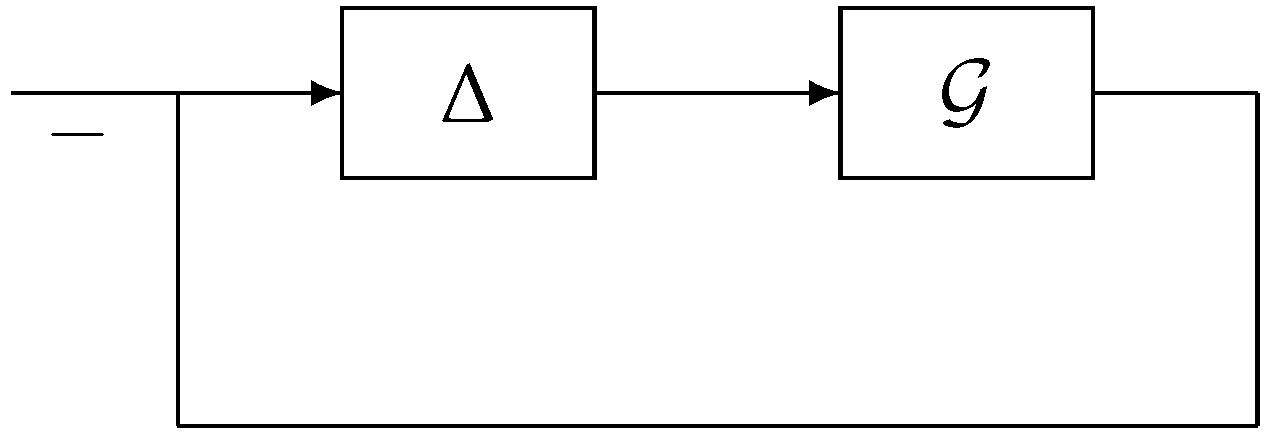
Next, we define the relative stability margins for
given by (
114) and (115). Specifically, let
,
, and consider the negative feedback interconnection
of
and
given in
Figure 2, where
is either a linear operator
, a nonlinear static operator
, or a nonlinear dynamic operator
with input
and output
. Furthermore, we assume that in the nominal case
the nominal closed-loop system is globally asymptotically stable in probability.
Definition 3 ([
16])
. Let be such that . Then the nonlinear stochastic dynamical system given by (114) and (115) is said to have a gain margin
if the negative feedback interconnection of and is globally asymptotically stable in probability for all , where , . Definition 4 ([
16])
. Let be such that . Then the nonlinear stochastic dynamical system given by (114) and (115) is said to have a sector margin
if the negative feedback interconnection of and is globally asymptotically stable in probability for all nonlinearities such that , , and , for all , . Definition 5. A nonlinear stochastic dynamical systems is asymptotically zero-state observable if and imply .
For the next two definitions, we assume that the system and the nonlinear operator are asymptotically zero-state observable.
Definition 6 ([
16])
. Let be such that . Then the nonlinear stochastic dynamical system given by (114) and (115) is said to have a disk margin
if the negative feedback interconnection of and Δ is globally asymptotically stable in probability for all dynamic operators Δ such that Δ is stochastically dissipative with respect to the supply rate and with a two-times continuously differentiable, positive definite storage function, where , , and such that . Definition 7 ([
16])
. Let be such that . Then the nonlinear stochastic dynamical system given by (114) and (115) is said to have a structured disk margin
if the negative feedback interconnection of and Δ is globally asymptotically stable in probability for all dynamic operators Δ such that , and , , is stochastically dissipative with respect to the supply rate and with a two-times continuously differentiable, positive definite storage function, where , , and such that . Note that if has a disk margin , then has gain and sector margins .
The following lemma is needed for developing the main results of this section.
Lemma 1. Consider the nonlinear stochastic dynamical system given by (114) and (115), where ϕ is a stochastically stabilizing feedback control law given by (111) and where V satisfiesFurthermore, suppose there exists such that andThen,for all and . Proof. Note that it follows from (
117) and (
118) that, for all
and
,
which implies that
This completes the proof. □
Next, we present disk margins for the nonlinear-nonquadratic optimal regulator given by Theorem 10. We consider the case in which , , is a constant diagonal matrix and the case in which it is not a constant diagonal matrix.
Theorem 11. Consider the nonlinear stochastic dynamical system given by (114) and (115), where ϕ is the stochastically stabilizing feedback control law given by (111) and where is a two-times continuously differentiable, radially unbounded function that satisfies (105)–(109). Assume that is asymptotically zero state observable. If the matrix , where , , and there exists such that and (118) is satisfied, then the nonlinear stochastic dynamical system has a structured disk margin . If, in addition, and there exists such that and (118) is satisfied, then the nonlinear stochastic dynamical system has a disk margin . Proof. Note that it follows from Lemma 1 that
Hence, with the storage function
, it follows from that
is stochastically dissipative with respect to the supply rate
. Now, the result is a direct consequence of Definitions 6 and 7, and the stochastic version of Corollary 6.2 given in [
16] with
and
. □
For the next result, define
where
is such that
and
.
Theorem 12. Consider the nonlinear stochastic dynamical system given by (114) and (115), where ϕ is the stochastically stabilizing feedback control law given by (111) and where is a two-times continuously differentiable, radially unbounded function that satisfies (105)–(109). Assume that is asymptotically zero-state observable. If there exists such that and (118) is satisfied, then the nonlinear stochastic system has a disk margin , where . Proof. It follows from Lemma 1 that
Thus, with the storage function
,
is stochastically dissipative with respect to thesupply rate
. The result now is a direct consequence of Definition 6 and the stochastic version of Corollary 6.2 given in [
16] with
and
. □
Next, we provide a result that guarantees sector and gain margins for the case in which , , is diagonal.
Theorem 13. Consider the nonlinear stochastic dynamical system given by (114) and (115), where ϕ is the stochastically stabilizing feedback control law given by (111) and where is a two-times continuously differentiable, radially unbounded function that satisfies (105)–(109). Furthermore, let , where , , . If there exists such that andthen the nonlinear stochastic dynamical system has a sector (and hence, gain) margin . Proof. Let
, where
is a static nonlinearity such that
,
, and
, for all
,
, where
and
; or, equivalently,
, for all
,
. In this case, the closed-loop system (
114) and (115) with
is given by
Next, consider the two-times continuously differentiable, radially unbounded function Lyapunov function candidate
V satisfying (
105)–(109) and let
denote the Lyapunov infinitesimal generator of the closed-loop system (
126). Now, it follows from (109) and (
125) that
which, by Theorem 2, implies that the closed-loop system (
126) is globally asymptotically stable in probability for all
such that
,
,
. Hence,
given by (
114) and (115) has sector (and hence, gain) margins
. □
It is important to note that Theorem 13 also holds in the case where (
125) is replaced with (
118) and with the additional assumption that (
118) is radially unbounded. To see this, note that (
127) can be written as
where
In this case, the result follows from Theorem 3.1 of [
45]. Furthermore, note that in the case where
,
, is diagonal, Theorem 13 guarantees larger gain and sector margins to the gain and sector margin guarantees provided by Theorem 12. However, Theorem 13 does not provide disk margin guarantees.
10. Optimal Linear-Quadratic Stochastic Control
In this section, we specialize Theorems 11 and 12 to the case of linear stochastic systems with multiplicative disturbance noise. Specifically, consider the stabilizable stochastic linear system given by
where
,
,
, and
, and assume that
is detectable and the system (
139) and (140) is asymptotically stable in probability with the feedback
or, equivalently,
is Hurwitz, where
. Furthermore, assume that
K is an optimal regulator that minimizes the quadratic performance functional given by
where
,
, and
are such that
,
, and
is observable. In this case, it follows from Theorem 9 with
,
,
,
,
,
, and
that the optimal control law
K is given by
, where
is the solution to the algebraic regulator Riccati equation given by
The following results provide guarantees of disk, sector, and gain margins for the system (
139) and (140). We assume that
is asymptotically zero-state observable.
Corollary 3. Consider the stochastic dynamical system with multiplicative noise given by (139) and (140) and with performance functional (141), and let . Then, with , where satisfies (142), the system (139) and (140) has disk margin (and, hence, sector and gain margins) , where Proof. The result is a direct consequence of Theorem 12 with
,
,
,
,
, and
. Specifically, note that (
142) is equivalent to (109). Now, with
given by (
143), it follows that
, and hence, (
118) is satisfied so that all the conditions of Theorem 12 are satisfied. □
Corollary 4. Consider the stochastic dynamical system with multiplicative noise given by (139) and (140) and with performance functional (141), and let , where is diagonal. Then, with , where satisfies (142), the system (139) and (140) has structured disk margin (and hence, gain and sector) margin , where Proof. The result is a direct consequence of Theorem 11 with
,
,
,
,
, and
. Specifically, note that (
142) is equivalent to (109). Now, with
given by (
144), it follows that
, and hence, (
118) is satisfied so that all the conditions of Theorem 11 are satisfied. □
The gain margins specified in Corollary 4 precisely match those presented in [
44] for deterministic linear-quadratic optimal regulators incorporating cross-weighting terms in the performance criterion. Additionally, as Corollary 4 ensures structured disk margins of
, it implies that the system possesses a phase margin
defined as follows:
or equivalently,
In the scenario where
, deduced from (
144), it follows that
. Consequently, Corollary 4 ensures a phase margin of
in each input–output channel. Additionally, stipulating
leads to the conclusion, based on Corollary 4, that the system described by (
139) and (140) possesses a gain and sector margin of
.
11. Stability Margins and Meaningful Inverse Optimality
In this section, we establish explicit links between stochastic stability margins, stochastic meaningful inverse optimality, and stochastic dissipativity, focusing on a specific quadratic supply rate. More precisely, we derive a stochastic counterpart to the classical return difference inequality for continuous-time systems with continuously differentiable flows [
21,
46] in the context of stochastic dynamical systems. Furthermore, we establish connections between stochastic dissipativity and optimality for stochastic nonlinear controllers. Notably, we demonstrate the equivalence between stochastic dissipativity and optimality in the realm of stochastic dynamical systems. Specifically, we illustrate that an optimal nonlinear feedback controller
, satisfying a return difference condition based on the infinitesimal generator of a controlled Markov diffusion process, is equivalent to the stochastic dynamical system—with input
u and output
—being stochastically dissipative with respect to a supply rate expressed as
.
Here, we assume that
is nonnegative for all
, which, in the terminology of [
25,
47], corresponds to a
meaningful cost functional. Furthermore, we assume
and
,
, and is radially unbounded. In this case, we establish connections between stochastic dissipativity and optimality for nonlinear stochastic controllers. The first result specializes Theorem 10 to the case in which
.
Theorem 16. Consider the nonlinear stochastic dynamical system (114) with performance functional (83) with and , . Assume that there exists a two-times continuously differentiable, radially unbounded function such thatThen the zero solution of the closed-loop systemis globally asymptotically stable in probability with the feedback control lawand the performance functional (83) is minimized in the sense thatFinally, Proof. The proof is similar to the proof of Theorem 9, and hence, is omitted. □
Next, we show that for a given nonlinear stochastic dynamical system
given by (
114) and (115), there exists an equivalence between optimality and stochastic dissipativity. For the following result we assume that for a given nonlinear stochastic system (
114), if there exists a feedback control law
that minimizes the performance functional (
83) with
,
, and
,
, then there exists a two-times continuously differentiable, radially unbounded function
such that (149) is satisfied.
Theorem 17. Consider the nonlinear stochastic dynamical system given by (114) and (115). The feedback control law is optimal with respect to a performance functional (82) with , , and , , if and only if the nonlinear stochastic system is stochastically dissipative with respect to the supply rate and has a two-times continuously differentiable positive-definite, radially unbounded storage function . Proof. If the control law
is optimal with respect to a performance functional (
82) with
,
, and
,
, then, by assumption, there exists a two-times continuously differentiable, radially unbounded function
such that (149) is satisfied. Hence, it follows from Proposition 1 that
which implies that
is stochastically dissipative with respect to the supply rate
.
Conversely, if
is stochastically dissipative with respect to the supply rate
and has a two-times continuously differentiable positive-definite storage function
, then, with
,
,
,
, and
, it follows from the stochastic version of Theorem 5.6 of [
16] that there exists a function
such that
and, for all
,
Now, the result follows from Theorem 16 with
. □
The next result gives disk and structured disk margins for the nonlinear stochastic dynamical system
given by (
114) and (115).
Corollary 5. Consider the nonlinear stochastic dynamical system given by (114) and (115), where ϕ is the stochastically stabilizing feedback control law given by (111) with and where is a two-times continuously differentiable, radially unbounded function that satisfies (105)–(109). Assume that is asymptotically zero state observable. Furthermore, assume , where , , and , . Then the nonlinear stochastic dynamical system has a structured disk margin . If, in addition, , then the nonlinear stochastic system has a disk margin Proof. The result is a direct consequence of Theorem 11. Specifically, if
,
, and
, then (
118) is trivially satisfied for all
. Now, the result follows immediately by letting
. □
Finally, we provide sector and gain margins for the nonlinear stochastic dynamical system
given by (
114) and (115).
Corollary 6. Consider the nonlinear stochastic dynamical system given by (114) and (115), where ϕ is a stochastically stabilizing feedback control law given by (111) with and where is a two-times continuously differentiable, radially unbounded function that satisfies (105)–(109). Furthermore, assume , where , , , and , . Then the nonlinear stochastic dynamical system has a sector (and hence, gain) margin . Proof. The result is a direct consequence of Theorem 13. Specifically, if
,
, and
, then (
125) is trivially satisfied for all
. Now, the result follows immediately by letting
. □



{kind=link}
{kind=link}