

Finite-Time Robust Path-Following Control of Perturbed Autonomous Ground Vehicles Using a Novel Self-Tuning Nonsingular Fast Terminal Sliding Manifold


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- The novel self-tuning nonsingular fast terminal sliding manifold (SNFTSM) for a robust control design is proposed; it delivers a closed-loop control with a fast convergence rate, singularity avoidance, and high performance of the output against uncertain terms.
- The proposed control framework based on the novel SNFTSM is integrated with the HGDO technique and the STW to simultaneously obtain great tracking performance and successfully mitigate chattering phenomena.
- A rigorous analysis is provided to theoretically prove the global finite-time convergence and stability of the whole closed-loop system in both phases. Moreover, the performance of the control approach in the presence of uncertainties and disturbances is confirmed.
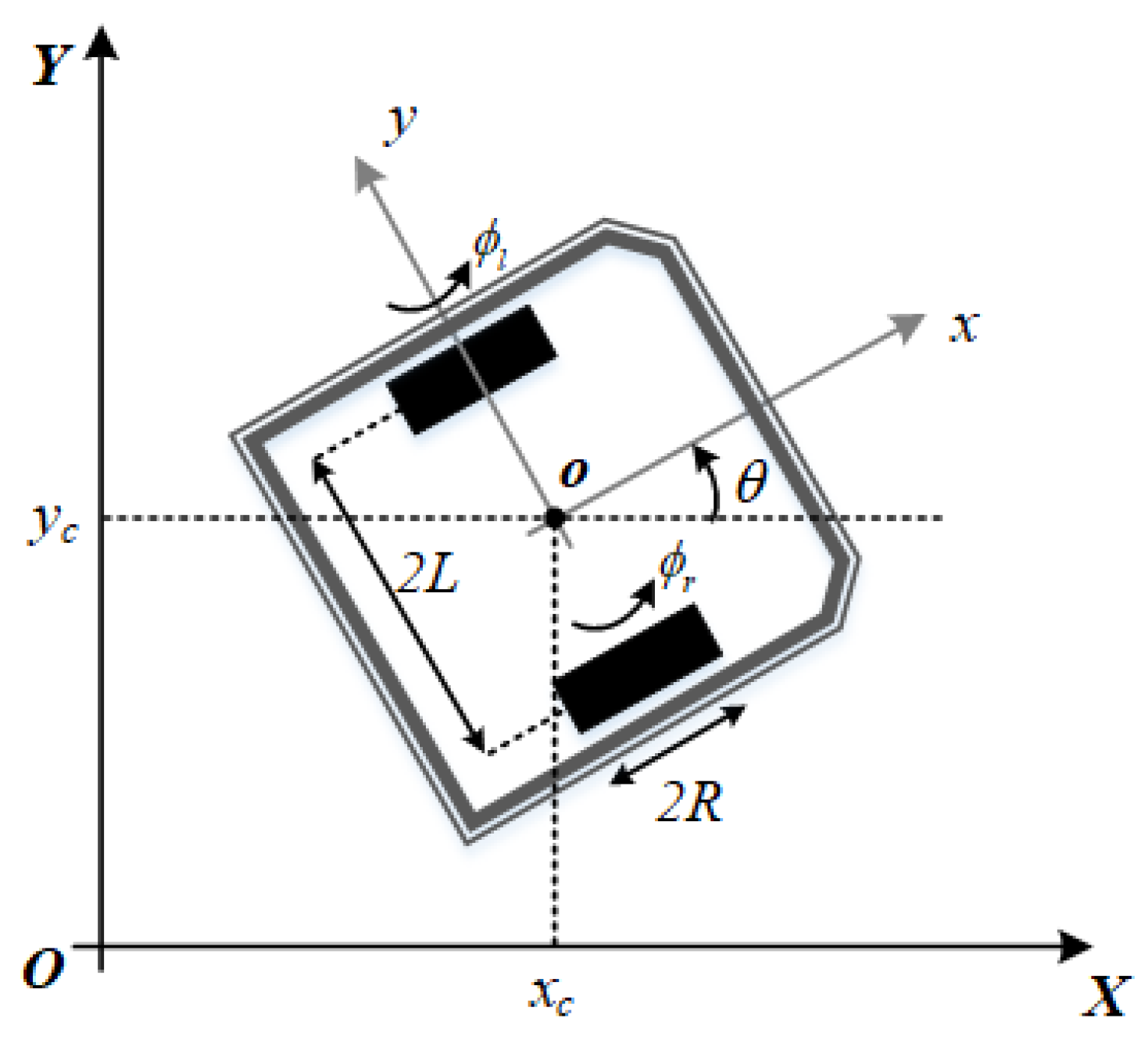
2. Problem Formulation
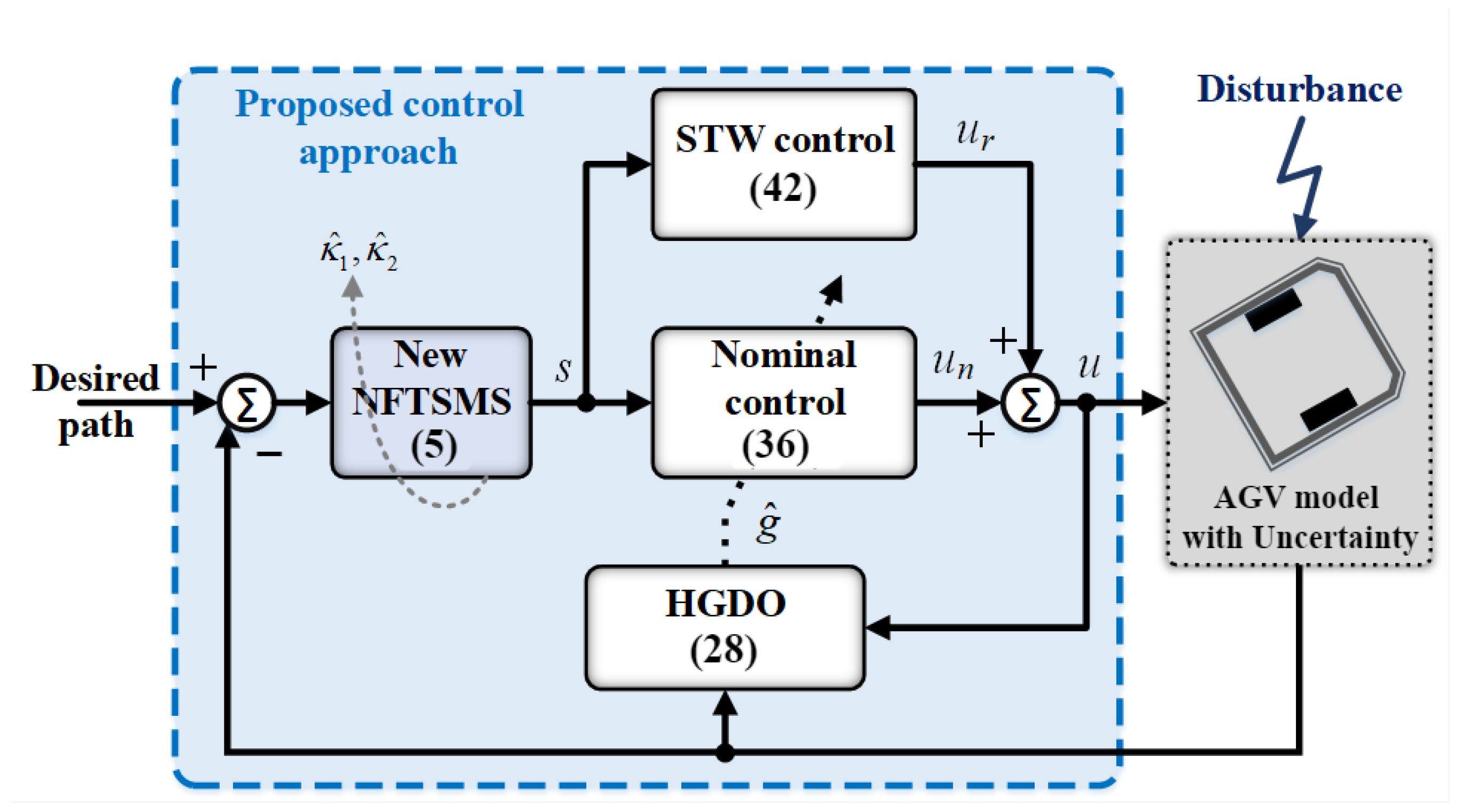
3. The Proposed Control Approach
3.1. Design of a Novel SNFTSM
3.2. Design of the Proposed Control Framework with HGDO
3.3. Design of the Proposed Control Scheme with STW
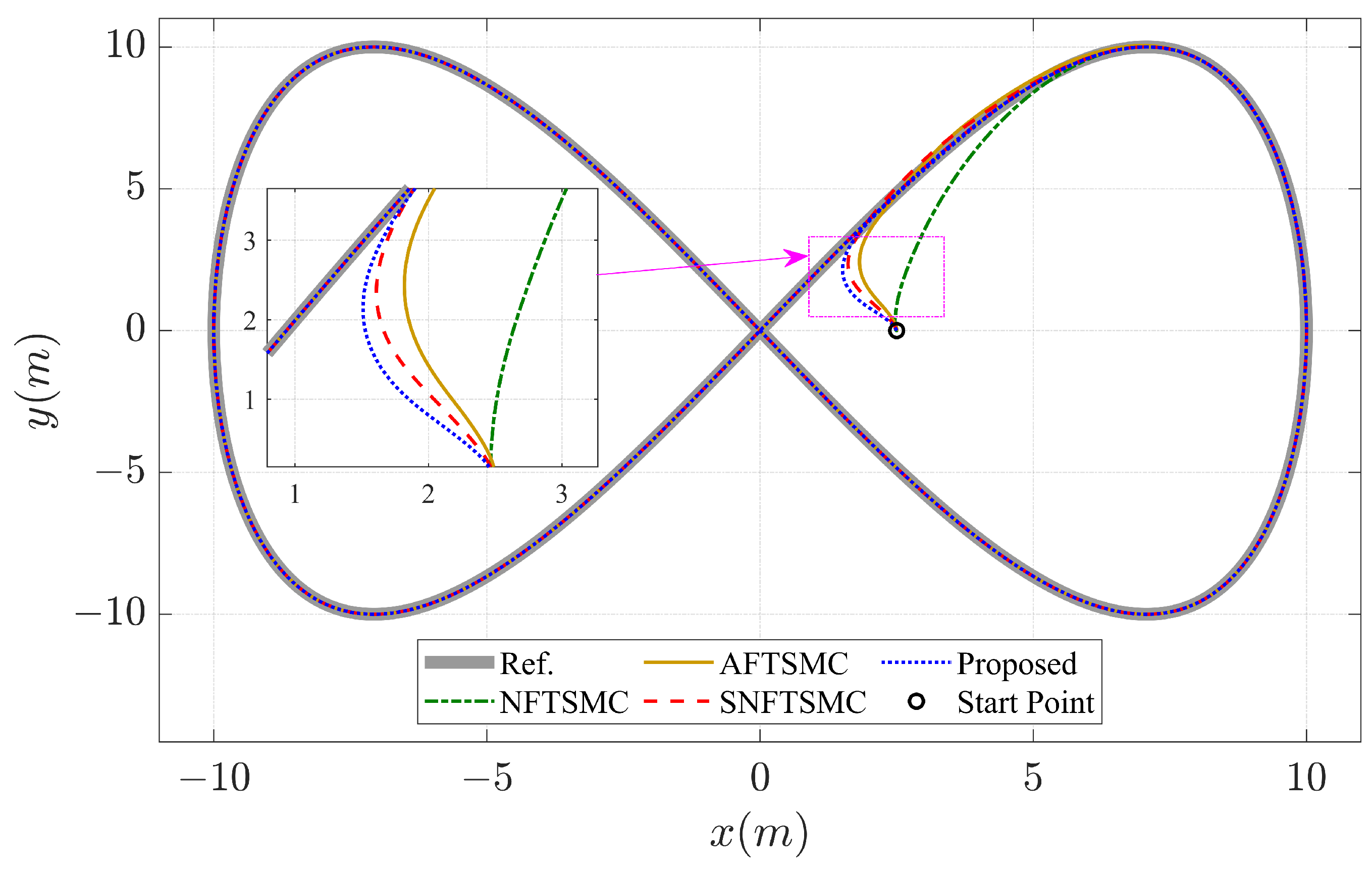
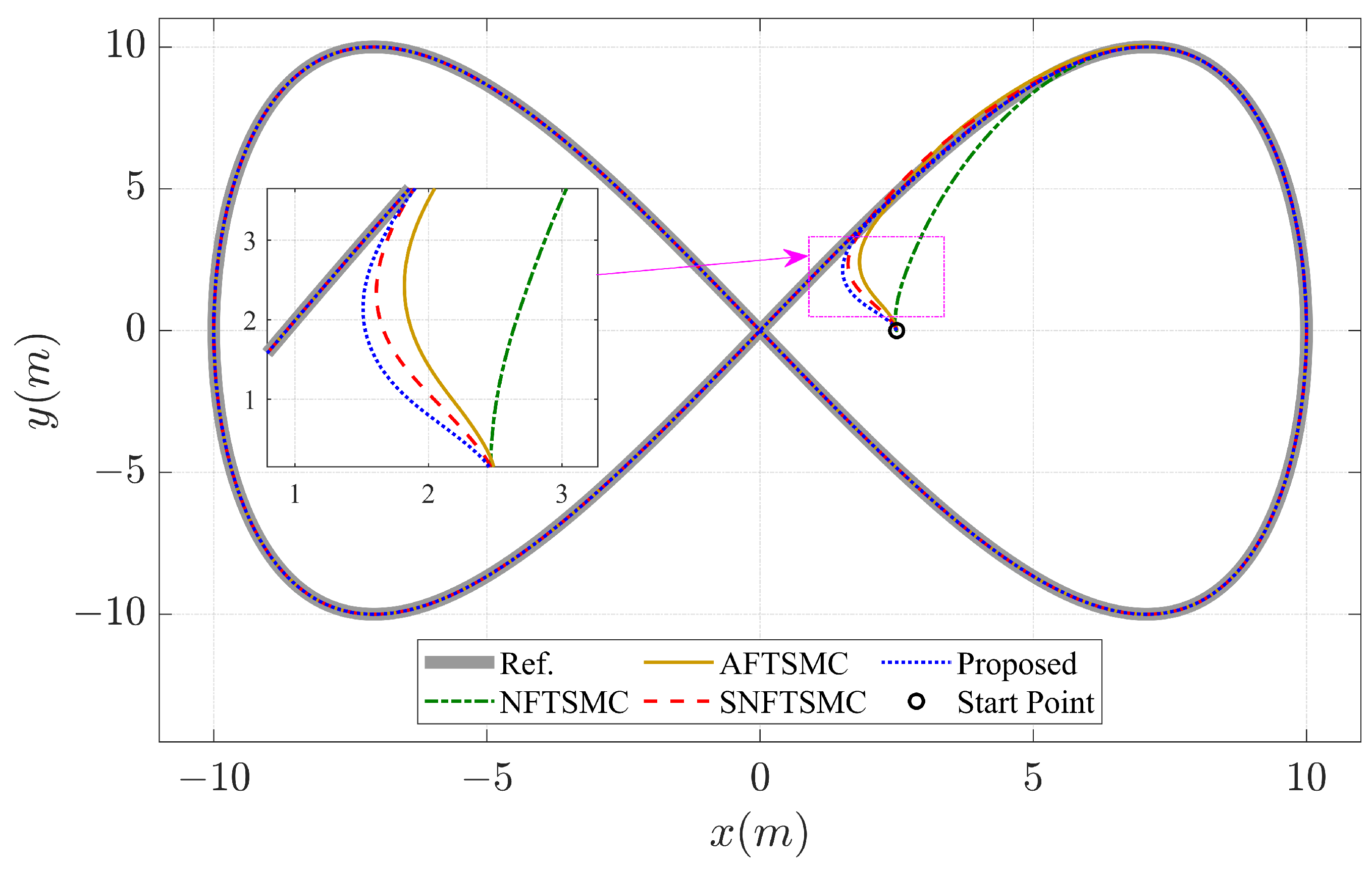
4. Numerical Examples
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| AGV | Autonomous Ground Vehicle |
| ANFTSMC | Adaptive Nonsingular Fast Terminal Sliding Mode Control |
| BL | Boundary Layer |
| DO | Disturbance Observer |
| FLS | Fuzzy Logic Systems |
| HGDO | High-Gain Disturbance Observer |
| FTSMC | Fast Terminal Sliding Mode Control |
| NNs | Neural Networks |
| NFTSMC | Nonsingular Fast Terminal Sliding Mode Control |
| SMC | Sliding Mode Control |
| STW | Super-Twisting Algorithm |
| SNFTSM | Self-tuning Nonsingular Fast Terminal Sliding Manifold |
| TSMC | Terminal Sliding Mode Control |
Appendix A. Mathematical Model
References
- Taheri, H.; Zhao, C.X. Omnidirectional mobile robots, mechanisms and navigation approaches. Mech. Mach. Theory 2020, 153, 103958. [Google Scholar] [CrossRef]
- Peng, H.; Li, F.; Liu, J.; Ju, Z. A Symplectic Instantaneous Optimal Control for Robot Trajectory Tracking With Differential-Algebraic Equation Models. IEEE Trans. Ind. Electron. 2020, 67, 3819–3829. [Google Scholar] [CrossRef]
- Li, S.; Ding, L.; Gao, H.; Chen, C.; Liu, Z.; Deng, Z. Adaptive neural network tracking control-based reinforcement learning for wheeled mobile robots with skidding and slipping. Neurocomputing 2018, 283, 20–30. [Google Scholar] [CrossRef]
- Tang, Y. Terminal sliding mode control for rigid robots. Automatica 1998, 34, 51–56. [Google Scholar] [CrossRef]
- Choi, J.; Lee, G.; Lee, C. Reinforcement learning-based dynamic obstacle avoidance and integration of path planning. Intell. Serv. Robot. 2021, 14, 663–677. [Google Scholar] [CrossRef]
- Vo, C.P.; Lee, J.; Jeon, J.H. Robust Adaptive Path Tracking Control Scheme for Safe Autonomous Driving via Predicted Interval Algorithm. IEEE Access 2022, 10, 124333–124344. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, Y.; Guan, X.; Hu, T.; Zhang, Z.; Jin, S.; Wang, Y.; Hao, J.; Li, G. Direction and Trajectory Tracking Control for Nonholonomic Spherical Robot by Combining Sliding Mode Controller and Model Prediction Controller. IEEE Robot. Autom. Lett. 2022, 7, 11617–11624. [Google Scholar] [CrossRef]
- Vo, C.P.; Jeon, J.H. An Integrated Motion Planning Scheme for Safe Autonomous Vehicles in Highly Dynamic Environments. Electronics 2023, 12, 1566. [Google Scholar] [CrossRef]
- Chen, X.; Zhao, H.; Sun, H.; Zhen, S.; Huang, K. A novel adaptive robust control approach for underactuated mobile robot. J. Frank. Inst. 2019, 356, 2474–2490. [Google Scholar] [CrossRef]
- Xie, Y.; Zhang, X.; Meng, W.; Zheng, S.; Jiang, L.; Meng, J.; Wang, S. Coupled fractional-order sliding mode control and obstacle avoidance of a four-wheeled steerable mobile robot. ISA Trans. 2021, 108, 282–294. [Google Scholar] [CrossRef] [PubMed]
- Feng, X.; Wang, C. Robust Adaptive Terminal Sliding Mode Control of an Omnidirectional Mobile Robot for Aircraft Skin Inspection. Int. J. Control Autom. Syst. 2021, 19, 1078–1088. [Google Scholar] [CrossRef]
- Taghavifar, H.; Mohammadzadeh, A. Adaptive Robust Terminal Sliding Mode Control with Integral Backstepping Synthesized Method for Autonomous Ground Vehicle Control. Vehicles 2023, 5, 1013–1029. [Google Scholar] [CrossRef]
- Nguyen, N.P.; Oh, H.; Moon, J. Continuous Nonsingular Terminal Sliding-Mode Control With Integral-Type Sliding Surface for Disturbed Systems: Application to Attitude Control for Quadrotor UAVs Under External Disturbances. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 5635–5660. [Google Scholar] [CrossRef]
- Han, Y.; Cheng, Y.; Xu, G. Trajectory Tracking Control of AGV Based on Sliding Mode Control With the Improved Reaching Law. IEEE Access 2019, 7, 20748–20755. [Google Scholar] [CrossRef]
- Jiang, B.; Li, J.; Yang, S. An improved sliding mode approach for trajectory following control of nonholonomic mobile AGV. Sci. Rep. 2022, 12, 17763. [Google Scholar] [CrossRef] [PubMed]
- Vo, C.P.; Ahn, K.K. An Adaptive Finite-Time Force-Sensorless Tracking Control Scheme for Pneumatic Muscle Actuators by an Optimal Force Estimation. IEEE Robot. Autom. Lett. 2022, 7, 1542–1549. [Google Scholar] [CrossRef]
- Wu, Y.; Wang, L.; Zhang, J.; Li, F. Path Following Control of Autonomous Ground Vehicle Based on Nonsingular Terminal Sliding Mode and Active Disturbance Rejection Control. IEEE Trans. Veh. Technol. 2019, 68, 6379–6390. [Google Scholar] [CrossRef]
- Hajjami, L.E.; Mellouli, E.M.; Berrada, M. Robust adaptive non-singular fast terminal sliding-mode lateral control for an uncertain ego vehicle at the lane-change maneuver subjected to abrupt change. Int. J. Dyn. Control 2021, 9, 1765–1782. [Google Scholar] [CrossRef]
- Vo, A.T.; Kang, H.J. A Novel Fault-Tolerant Control Method for Robot Manipulators Based on Non-Singular Fast Terminal Sliding Mode Control and Disturbance Observer. IEEE Access 2020, 8, 109388–109400. [Google Scholar] [CrossRef]
- Du, S.; Liu, Y.; Wang, Y.; Li, Y.; Yan, Z. Research on a Permanent Magnet Synchronous Motor Sensorless Anti-Disturbance Control Strategy Based on an Improved Sliding Mode Observer. Electronics 2023, 12, 4188. [Google Scholar] [CrossRef]
- Luo, M.; Yu, Z.; Xiao, Y.; Xiong, L.; Xu, Q.; Ma, L.; Wu, Z. Full-order adaptive sliding mode control with extended state observer for high-speed PMSM speed regulation. Sci. Rep. 2023, 13, 6200. [Google Scholar] [CrossRef] [PubMed]
- Edelbaher, G.; Jezernik, K.; Urlep, E. Low-speed sensorless control of induction Machine. IEEE Trans. Ind. Electron. 2006, 53, 120–129. [Google Scholar] [CrossRef]
- Wang, L.; Chen, C.L.P. Reduced-Order Observer-Based Dynamic Event-Triggered Adaptive NN Control for Stochastic Nonlinear Systems Subject to Unknown Input Saturation. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 1678–1690. [Google Scholar] [CrossRef] [PubMed]
- Moreno, J.A.; Osorio, M. A Lyapunov approach to second-order sliding mode controllers and observers. In Proceedings of the 2008 47th IEEE Conference on Decision and Control, Cancun, Mexico, 9–11 December 2008; pp. 2856–2861. [Google Scholar]
- Chalanga, A.; Kamal, S.; Fridman, L.M.; Bandyopadhyay, B.; Moreno, J.A. Implementation of Super-Twisting Control: Super-Twisting and Higher Order Sliding-Mode Observer-Based Approaches. IEEE Trans. Ind. Electron. 2016, 63, 3677–3685. [Google Scholar] [CrossRef]
- Al-Mayyahi, A.; Wang, W.; Birch, P. Adaptive Neuro-Fuzzy Technique for Autonomous Ground Vehicle Navigation. Robotics 2014, 3, 349–370. [Google Scholar] [CrossRef]
- Huang, D.; Zhai, J.; Ai, W.; Fei, S. Disturbance observer-based robust control for trajectory tracking of wheeled mobile robots. Neurocomputing 2016, 198, 74–79. [Google Scholar] [CrossRef]
- Li, L.; Wang, T.; Xia, Y.; Zhou, N. Trajectory tracking control for wheeled mobile robots based on nonlinear disturbance observer with extended Kalman filter. J. Frank. Inst. 2020, 357, 8491–8507. [Google Scholar] [CrossRef]
- Neĭmark, I.I.; Fufaev, N.A.; Barbour, J.R. Dynamics of Nonholonomic Systems. In Translations of Mathematical Monographs; American Mathematical Society: Providence, RI, USA, 1972. [Google Scholar]
- Vo, C.P.; To, X.D.; Ahn, K.K. A Novel Adaptive Gain Integral Terminal Sliding Mode Control Scheme of a Pneumatic Artificial Muscle System With Time-Delay Estimation. IEEE Access 2019, 7, 141133–141143. [Google Scholar] [CrossRef]
- Feng, Y.; Yu, X.; Man, Z. Non-singular terminal sliding mode control of rigid manipulators. Automatica 2002, 38, 2159–2167. [Google Scholar] [CrossRef]
- Bloch, A.M.; Crouch, P.; Baillieul, J.; Marsden, J. Nonholonomic Mechanics and Control. Appl. Mech. Rev. 2004, 57. [Google Scholar] [CrossRef]
- Li, S.; He, Z.; Liu, C.; Zhan, Y.; Li, H.; Huang, X.; Zhang, Z. Nonsingular Fast Terminal Sliding Mode Control with Extended State Observer and Tracking Differentiator for Uncertain Nonlinear Systems. Math. Probl. Eng. 2014, 2014, 639707. [Google Scholar]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vo, C.P.; Hoang, Q.H.; Kim, T.-H.; Jeon, J.h. Finite-Time Robust Path-Following Control of Perturbed Autonomous Ground Vehicles Using a Novel Self-Tuning Nonsingular Fast Terminal Sliding Manifold. Mathematics 2024, 12, 549. https://doi.org/10.3390/math12040549
Vo CP, Hoang QH, Kim T-H, Jeon Jh. Finite-Time Robust Path-Following Control of Perturbed Autonomous Ground Vehicles Using a Novel Self-Tuning Nonsingular Fast Terminal Sliding Manifold. Mathematics. 2024; 12(4):549. https://doi.org/10.3390/math12040549
Chicago/Turabian StyleVo, Cong Phat, Quoc Hung Hoang, Tae-Hyun Kim, and Jeong hwan Jeon. 2024. "Finite-Time Robust Path-Following Control of Perturbed Autonomous Ground Vehicles Using a Novel Self-Tuning Nonsingular Fast Terminal Sliding Manifold" Mathematics 12, no. 4: 549. https://doi.org/10.3390/math12040549
APA StyleVo, C. P., Hoang, Q. H., Kim, T.-H., & Jeon, J. h. (2024). Finite-Time Robust Path-Following Control of Perturbed Autonomous Ground Vehicles Using a Novel Self-Tuning Nonsingular Fast Terminal Sliding Manifold. Mathematics, 12(4), 549. https://doi.org/10.3390/math12040549