


Modified Wave-Front Propagation and Dynamics Coming from Higher-Order Double-Well Potentials in the Allen–Cahn Equations


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Numerical Methods
3. Numerical Simulations for One-Dimensional Domains
3.1. Equilibrium Solutions
3.2. Traveling Wave Solution
3.3. Wave Propagation with Noise
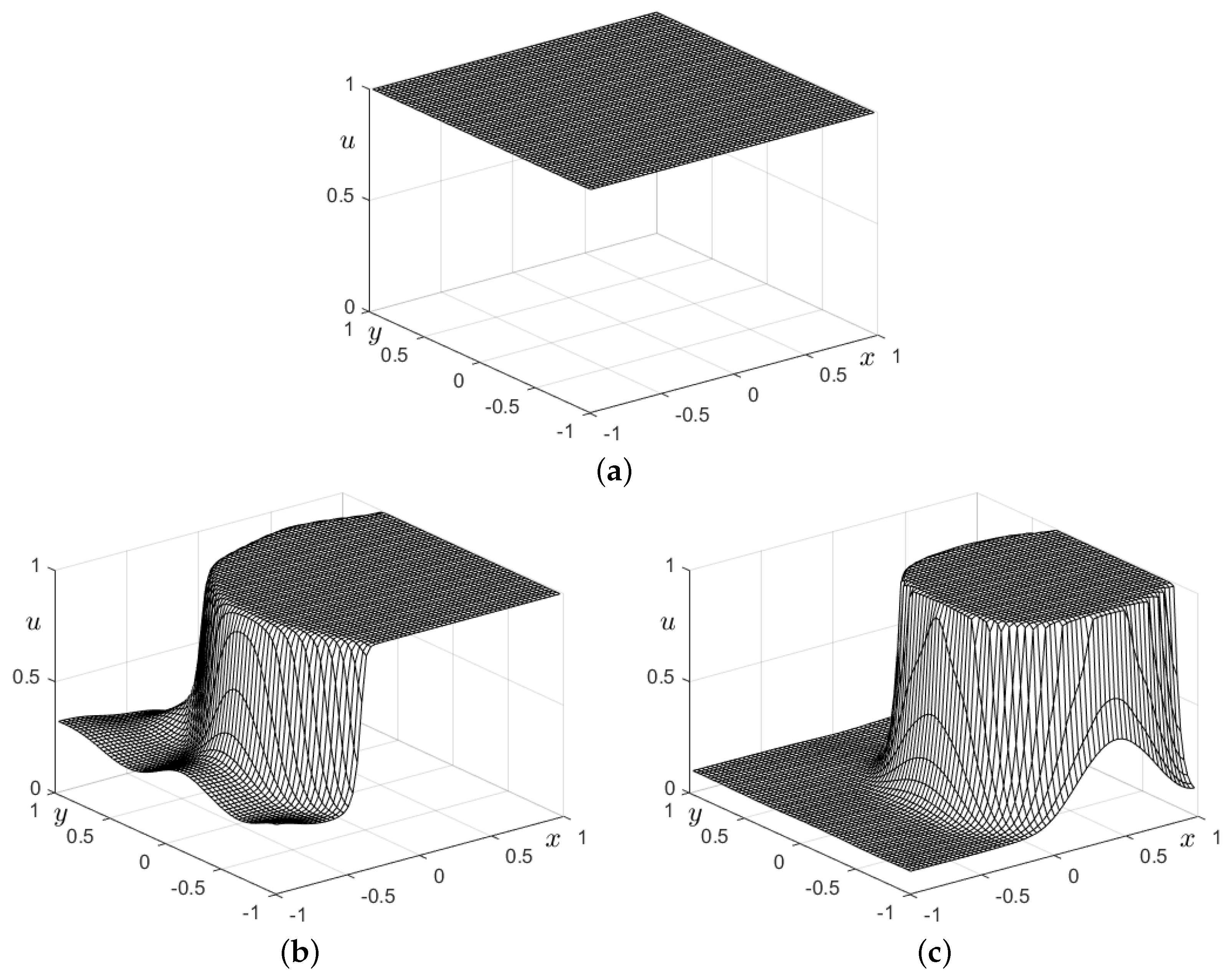
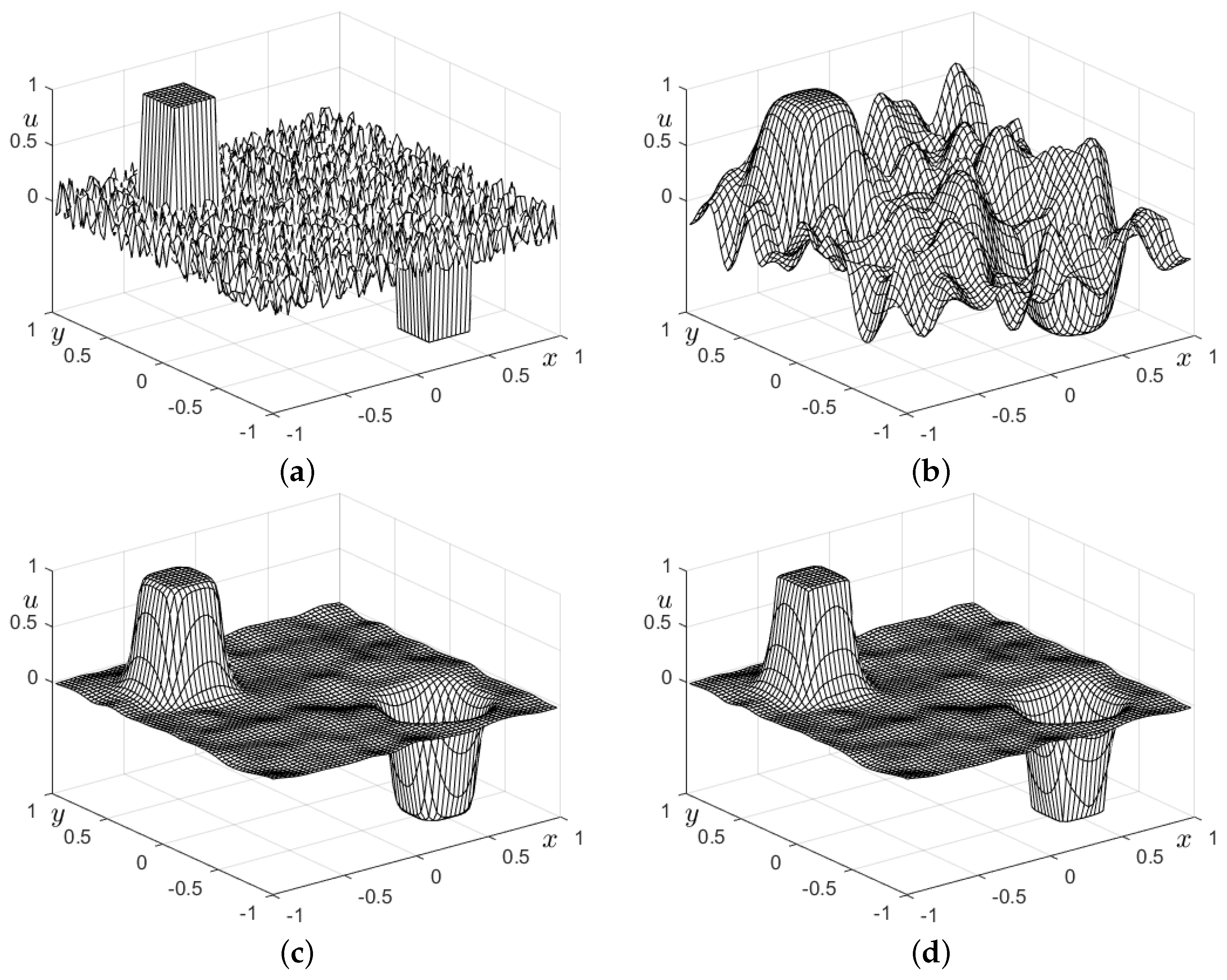
4. Numerical Simulations for Two-Dimensional Domain
5. Conclusions
- The numerical investigation showed that the order of polynomial potentials significantly impacts wave-front propagation in the AC equations;
- Higher-order double-well potentials influence the wave-front moving under noisy data;
- The study enhances our understanding of polynomial potentials in complex systems and suggests future research directions, including classification and noisy removal image processing;
- Potential applications extend to other systems, broadening the AC framework’s relevance to phase transition modeling.
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
| Listing A1. MATLAB code for the high-order AC equation. |
| clear; clf; Nx = 64; Ny = Nx; Lx = −1; Rx = 1; Ly = −1; Ry = 1; h = (Rx − Lx)/Nx; x = linspace(Lx − 0.5∗h,Rx + 0.5∗h,Nx + 2); y = linspace(Ly − 0.5∗h,Ry + 0.5∗h,Ny + 2); eps0 = 1∗h; T = 0.1; p = zeros(Nx + 2,Ny + 2); b = 0.15; for i = 1:Nx + 2 for j = 1:Ny + 2 if abs(x(i) + 0.5)<b && abs(y(j) − 0.5)<b p(i,j) = 1; elseif abs(x(i)−0.5)<b && abs(y(j) + 0.5)<b p(i,j) = −1; else p(i,j) = 0 + 0.2∗(2∗rand(1)−1); end end end a = 5; eps2 = (eps0/a)^2; dt = 0.9∗eps2∗h^2/(2∗h^2+4∗eps2); Nt = round(T/dt); dt = T/Nt; np = p; for iter = 1:Nt p(1,:) = p(2,:); p(Nx+2,:) = p(Nx+1,:); p(:,1) = p(:,2); p(:,Ny+2) = p(:,Ny+1); for i = 2:Nx + 1 for j = 2:Ny + 1 np(i,j) = p(i,j) + dt∗( p(i,j)^(2∗a−1). ∗(1−p(i,j)^(2∗a))/(a∗eps2) ... +(p(i − 1,j) + p(i + 1,j)+p(i,j − 1) + p(i,j + 1) − 4.0*p(i,j))/h^2); end end p = np; if mod(iter,50) == 0 clf; mesh(x(2:Nx + 1),y(2:Ny + 1),p(2:Nx + 1,2:Ny + 1)’) axis([Lx Rx Ly Ry −1 1]); pause(0.1) end end |
References
- Shen, J.; Yang, X. Numerical approximations of Allen–Cahn and Cahn–Hilliard equations. Discrete Contin. Dyn. Syst. Ser. A 2010, 28, 1669–1691. [Google Scholar] [CrossRef]
- Allen, S.M.; Cahn, J.W. A microscopic theory for antiphase boundary motion and its application to antiphase domain coarsening. Acta Metall. 1979, 27, 1085–1095. [Google Scholar] [CrossRef]
- Singh, J.; Alshehri, A.M.; Momani, S.; Hadid, S.; Kumar, D. Computational analysis of fractional diffusion equations occurring in oil pollution. Mathematics 2022, 10, 3827. [Google Scholar] [CrossRef]
- Lee, D. Gradient-descent-like scheme for the Allen–Cahn equation. AIP Adv. 2023, 13, 8. [Google Scholar] [CrossRef]
- Zhai, S.; Feng, X.; He, Y. Numerical simulation of the three-dimensional Allen–Cahn equation by the high-order compact ADI method. Comput. Phys. Commun. 2014, 185, 2449–2455. [Google Scholar] [CrossRef]
- Xia, Q.; Yang, J.; Li, Y. On the conservative phase-field method with the N-component incompressible flows. Phys. Fluids 2023, 35, 012120. [Google Scholar] [CrossRef]
- Huang, Q.; Yang, J. Linear and energy-stable method with enhanced consistency for the incompressible Cahn–Hilliard–Navier–Stokes two-phase flow model. Mathematics 2022, 10, 4711. [Google Scholar] [CrossRef]
- Alsayed, H.; Fakih, H.; Miranville, A.; Wehbe, A. Optimal control of an Allen–Cahn model for tumor growth through supply of cytotoxic drugs. Integration 2022, 2, 3–13. [Google Scholar] [CrossRef]
- Budd, J.; van Gennip, Y.; Latz, J. Classification and image processing with a semi-discrete scheme for fidelity forced Allen–Cahn on graphs. GAMM-Mitt. 2021, 44, e202100004. [Google Scholar] [CrossRef]
- Duanzhu, S.; Wang, J.; Jia, C. Hotel comment emotion classification based on the MF-DFA and partial differential equation classifier. Fractal Fract. 2023, 7, 744. [Google Scholar] [CrossRef]
- Liu, C.; Qiao, Z.; Zhang, Q. Multi-phase image segmentation by the Allen–Cahn Chan–Vese model. Comput. Math. Appl. 2023, 141, 207–220. [Google Scholar] [CrossRef]
- Wang, J.; Jiang, W. Surface reconstruction algorithm using a modified Allen–Cahn equation. Mod. Phys. Lett. B 2022, 36, 2250147. [Google Scholar] [CrossRef]
- Li, Y.; Xu, L.; Ying, S. DWNN: Deep wavelet neural network for solving partial differential equations. Mathematics 2022, 10, 1976. [Google Scholar] [CrossRef]
- Zhang, G.; Yang, H.; Pan, G.; Duan, Y.; Zhu, F.; Chen, Y. Constrained self-adaptive physics-informed neural networks with ResNet block-enhanced network architecture. Mathematics 2023, 11, 1109. [Google Scholar] [CrossRef]
- Sun, K.; Feng, X. A second-order network structure based on gradient-enhanced physics-informed neural networks for solving parabolic partial differential equations. Entropy 2023, 25, 674. [Google Scholar] [CrossRef]
- Xia, B.; Xi, X.; Yu, R.; Zhang, P. Unconditional energy-stable method for the Swift–Hohenberg equation over arbitrarily curved surfaces with second-order accuracy. Appl. Numer. Math. 2024, 198, 192–201. [Google Scholar] [CrossRef]
- Shah, A.; Sabir, M.; Qasim, M.; Bastian, P. Efficient numerical scheme for solving the Allen-Cahn equation. Numer. Methods Partial Differ. Equ. 2018, 34, 1820–1833. [Google Scholar] [CrossRef]
- Xiao, X.; He, R.; Feng, X. Unconditionally maximum principle preserving finite element schemes for the surface Allen–Cahn type equations. Numer. Methods Partial Differ. Equ. 2020, 36, 418–438. [Google Scholar] [CrossRef]
- Xiao, X.; Feng, X. A second-order maximum bound principle preserving operator splitting method for the Allen–Cahn equation with applications in multi-phase systems. Math. Comput. Simul. 2022, 202, 36–58. [Google Scholar] [CrossRef]
- Wang, X.; Kou, J.; Gao, H. Linear energy stable and maximum principle preserving semi-implicit scheme for Allen–Cahn equation with double well potential. Commun. Nonlinear Sci. Numer. Simul. 2021, 98, 105766. [Google Scholar] [CrossRef]
- Xie, W.; Xia, Q.; Yu, Q.; Li, Y. An effective phase field method for topology optimization without the curvature effects. Comput. Math. Appl. 2023, 146, 200–212. [Google Scholar] [CrossRef]
- Tan, Z.; Zhang, C. The discrete maximum principle and energy stability of a new second-order difference scheme for Allen–Cahn equations. Appl. Numer. Math. 2021, 166, 227–237. [Google Scholar] [CrossRef]
- Deng, D.; Zhao, Z. Efficiently energy-dissipation-preserving ADI methods for solving two-dimensional nonlinear Allen–Cahn equation. Comput. Math. Appl. 2022, 128, 249–272. [Google Scholar] [CrossRef]
- Poochinapan, K.; Wongsaijai, B. Numerical analysis for solving Allen–Cahn equation in 1D and 2D based on higher-order compact structure-preserving difference scheme. Appl. Math. Comput. 2022, 434, 127374. [Google Scholar] [CrossRef]
- Ntsokongo, A.J. Asymptotic behavior of an Allen–Cahn type equation with temperature. Discrete Contin. Dyn. Syst.-S 2023, 16, 2452–2466. [Google Scholar] [CrossRef]
- Nara, M. Large time behavior of the solutions with spreading fronts in the Allen–Cahn equations on Rn. Commun. Pure Appl. Anal. 2022, 21, 3605–3628. [Google Scholar] [CrossRef]
- Evans, L.C.; Soner, H.M.; Souganidis, H.M. Phase transitions and generalized motion by mean curvature. Commun. Pure Appl. Math. 1992, 45, 1097–1123. [Google Scholar] [CrossRef]
- Feng, X.; Prohl, A. Numerical analysis of the Allen–Cahn equation and approximation for mean curvature flows. Numer. Math. 2003, 94, 33–65. [Google Scholar] [CrossRef]
- Li, Y.; Liu, R.; Xia, Q.; He, C.; Li, Z. First- and second-order unconditionally stable direct discretization methods for multi-component Cahn–Hilliard system on surfaces. J. Comput. Appl. Math. 2022, 401, 113778. [Google Scholar] [CrossRef]
- Ham, S.; Kwak, S.; Lee, H.G.; Hwang, Y.; Kim, J. A maximum principle of the Fourier spectral method for the diffusion equation. Electron. Res. Arch. 2023, 31, 5396–5405. [Google Scholar]
- Yao, L.; Zhang, X.; Li, N. Two-step discretization method for 2D/3D Allen–Cahn equation based on RBF-FD scheme. Numer. Methods Partial Differ. Equ. 2020, 36, 2035–2049. [Google Scholar] [CrossRef]
- Uzunca, M.; Karasözen, B. Linearly implicit methods for Allen–Cahn equation. Appl. Math. Comput. 2023, 450, 127984. [Google Scholar] [CrossRef]
- Sun, J.; Zhang, H.; Qian, X.; Song, S. Up to eighth-order maximum-principle-preserving methods for the Allen–Cahn equation. Numer. Algorithms 2023, 92, 1041–1062. [Google Scholar] [CrossRef]
- Choi, J.; Ham, S.; Kwak, S.; Hwang, Y.; Kim, J. Stability analysis of an explicit numerical scheme for the Allen–Cahn equation with high-order polynomial potentials. AIMS Math. 2024, 9, 19332–19344. [Google Scholar] [CrossRef]
- Wang, Z.; Sun, L.; Cao, J. Local discontinuous Galerkin method coupled with nonuniform time discretizations for solving the time-fractional Allen-Cahn equation. Fractal Fract. 2022, 6, 349. [Google Scholar] [CrossRef]
- Chen, Y.; Huang, Y.; Yi, N. A SCR-based error estimation and adaptive finite element method for the Allen–Cahn equation. Comput. Math. Appl. 2019, 78, 204–223. [Google Scholar] [CrossRef]
- Feng, X.; Wu, H. A posteriori error estimates and an adaptive finite element method for the Allen–Cahn equation and the mean curvature flow. J. Sci. Comput. 2005, 24, 121–146. [Google Scholar] [CrossRef]
- Kbiri Alaoui, M.; Nonlaopon, K.; Zidan, A.M.; Khan, A.; Shah, R. Analytical investigation of fractional-order Cahn–Hilliard and Gardner equations using two novel techniques. Mathematics 2022, 10, 1643. [Google Scholar] [CrossRef]
- Hwang, Y.; Ham, S.; Lee, C.; Lee, G.; Kang, S.; Kim, J. A simple and efficient numerical method for the Allen–Cahn equation on effective symmetric triangular meshes. Electron. Res. Arch. 2023, 31, 4557–4578. [Google Scholar] [CrossRef]
- Zhao, W.; Guan, Q. Numerical analysis of energy stable weak Galerkin schemes for the Cahn–Hilliard equation. Commun. Nonlinear Sci. Numer. Simul. 2023, 118, 106999. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, J. Modified Wave-Front Propagation and Dynamics Coming from Higher-Order Double-Well Potentials in the Allen–Cahn Equations. Mathematics 2024, 12, 3796. https://doi.org/10.3390/math12233796
Kim J. Modified Wave-Front Propagation and Dynamics Coming from Higher-Order Double-Well Potentials in the Allen–Cahn Equations. Mathematics. 2024; 12(23):3796. https://doi.org/10.3390/math12233796
Chicago/Turabian StyleKim, Junseok. 2024. "Modified Wave-Front Propagation and Dynamics Coming from Higher-Order Double-Well Potentials in the Allen–Cahn Equations" Mathematics 12, no. 23: 3796. https://doi.org/10.3390/math12233796
APA StyleKim, J. (2024). Modified Wave-Front Propagation and Dynamics Coming from Higher-Order Double-Well Potentials in the Allen–Cahn Equations. Mathematics, 12(23), 3796. https://doi.org/10.3390/math12233796