
Robust Bumpless Transfer Control for Switched Systems with Unmatched Uncertainties Based on the Common Robust Integral Sliding Mode Under Arbitrary Switching Rules †

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- (1)
- The improved robust linear feedback control (RLFC) is given for the bumpless transfer. The improved RLFC has the robustness to the unmatched uncertainty and disturbance, and the bumpless transfer about the indices is still realized if the linear matrix inequality (LMI) conditions are satisfied. Compared to the existing result, the linear feedback control generally does not consider the uncertainty and disturbance.
- (2)
- The robust integral sliding mode (RISM) design for the SSs is applied to the CSMC control design, with the robustness to the unmatched uncertainty and disturbance from the initial time instant. This application makes the CSMC have the robustness to the unmatched uncertainty or disturbance while still keeping the bumpless transfer. The stability of the overall SS on the RISM surface is analyzed under the arbitrary switching rule.
2. Problem Formulation
3. The Robust Linear Feedback Control Design
4. Robust Integral Sliding Mode Surface Design
- (1)
- When , .
- (2)
- When , the inequality
5. Sliding Mode Controller Design
6. Illustrative Examples
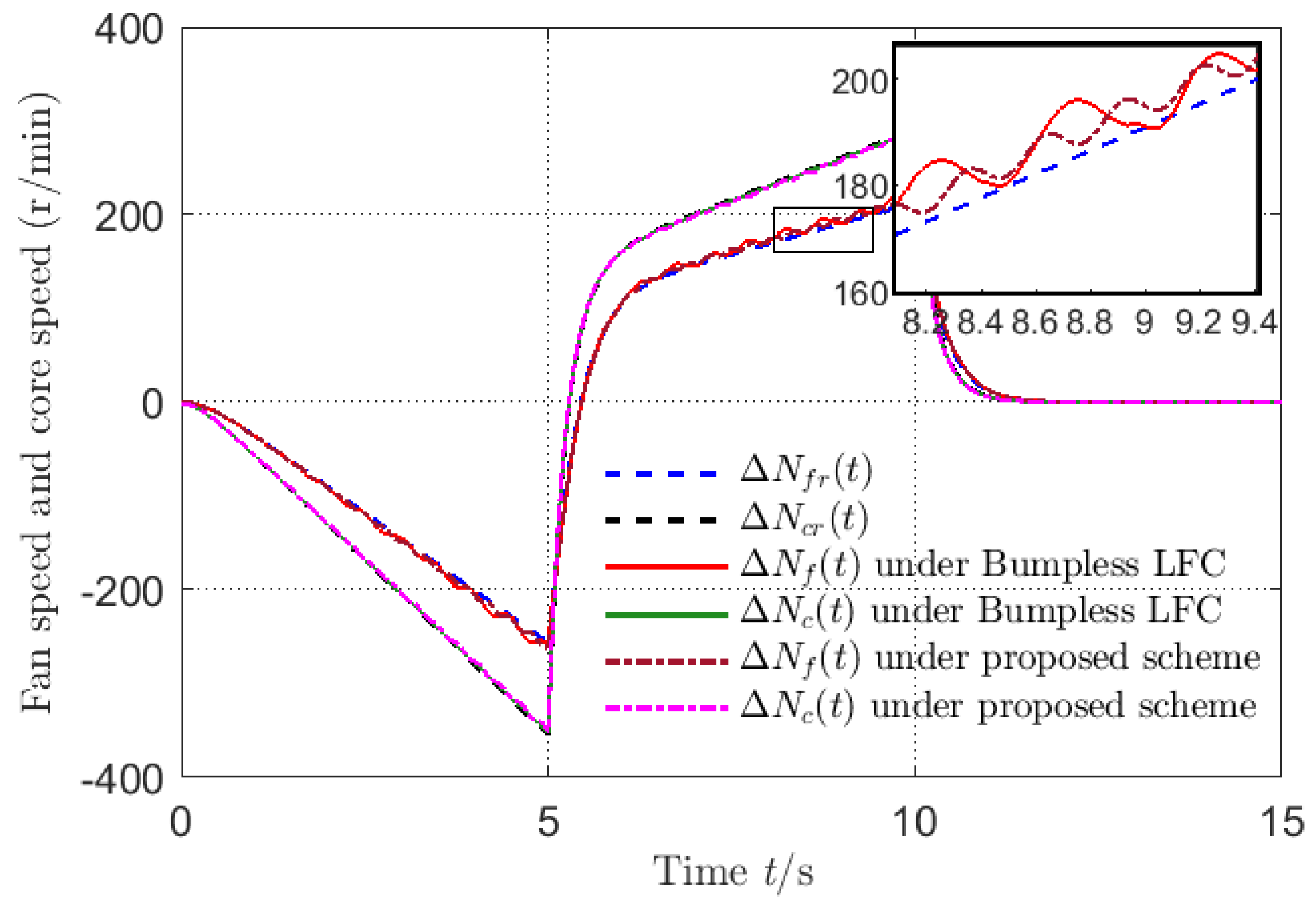
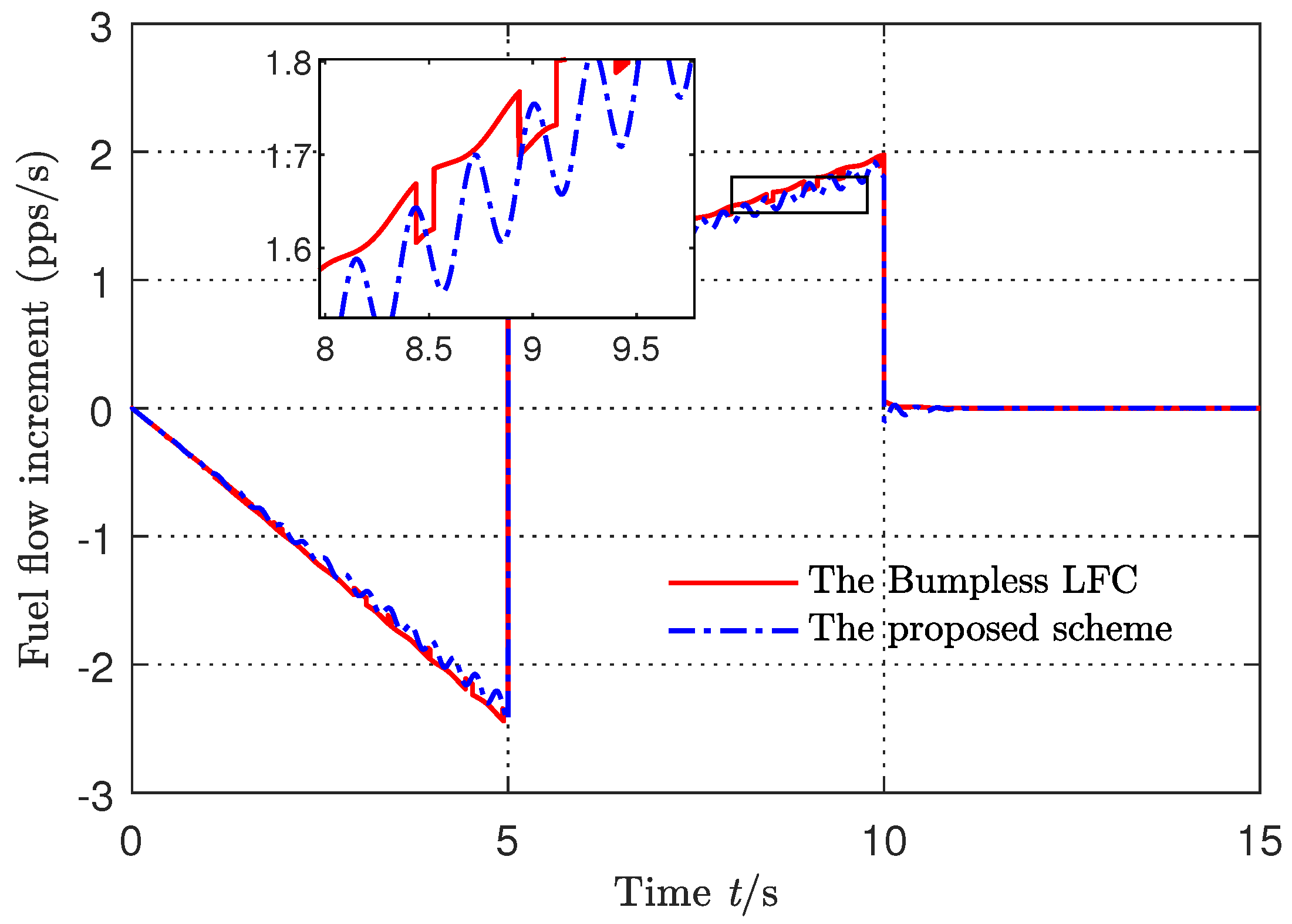
6.1. Example 1: A Turbofan Aeroengine
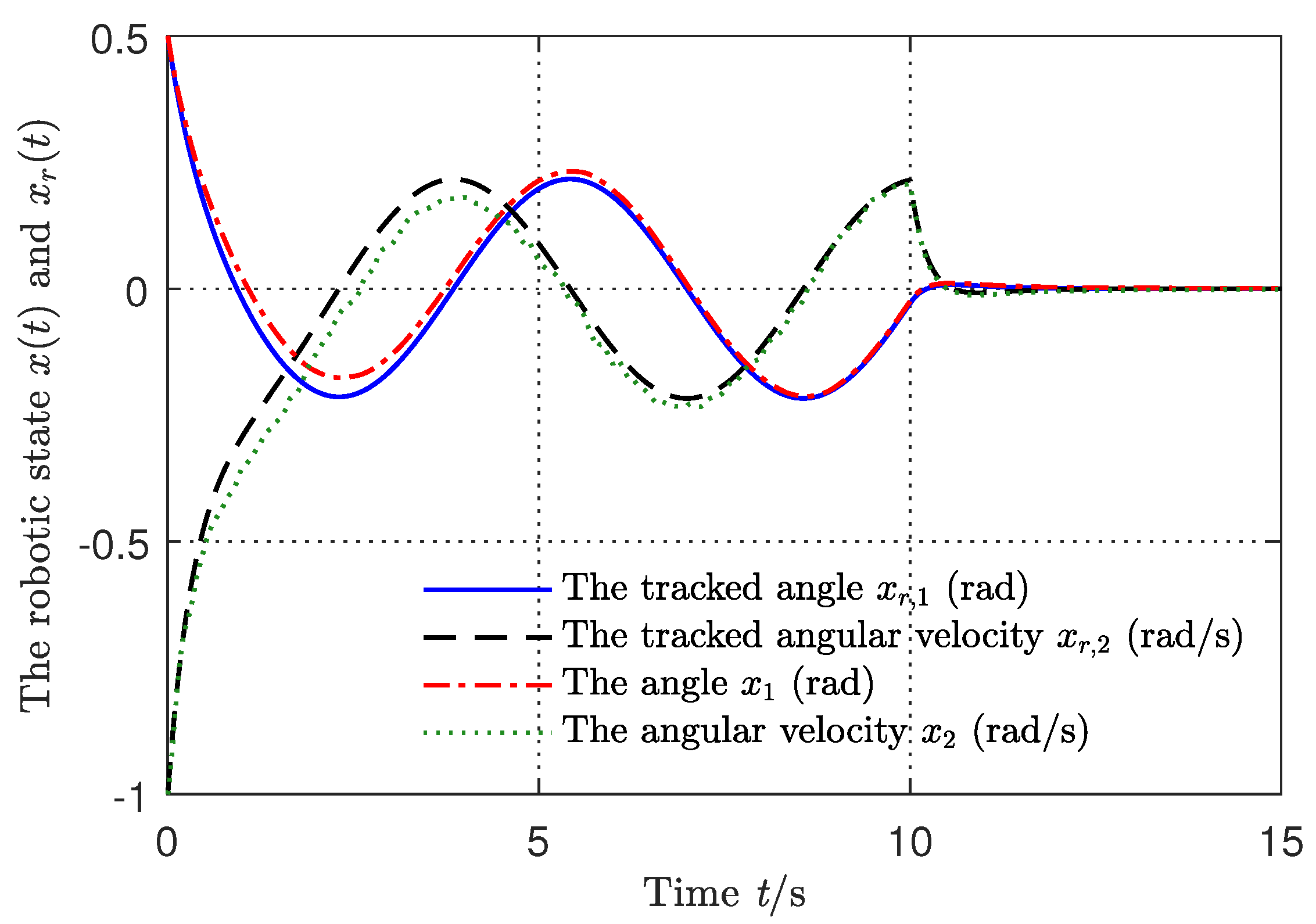
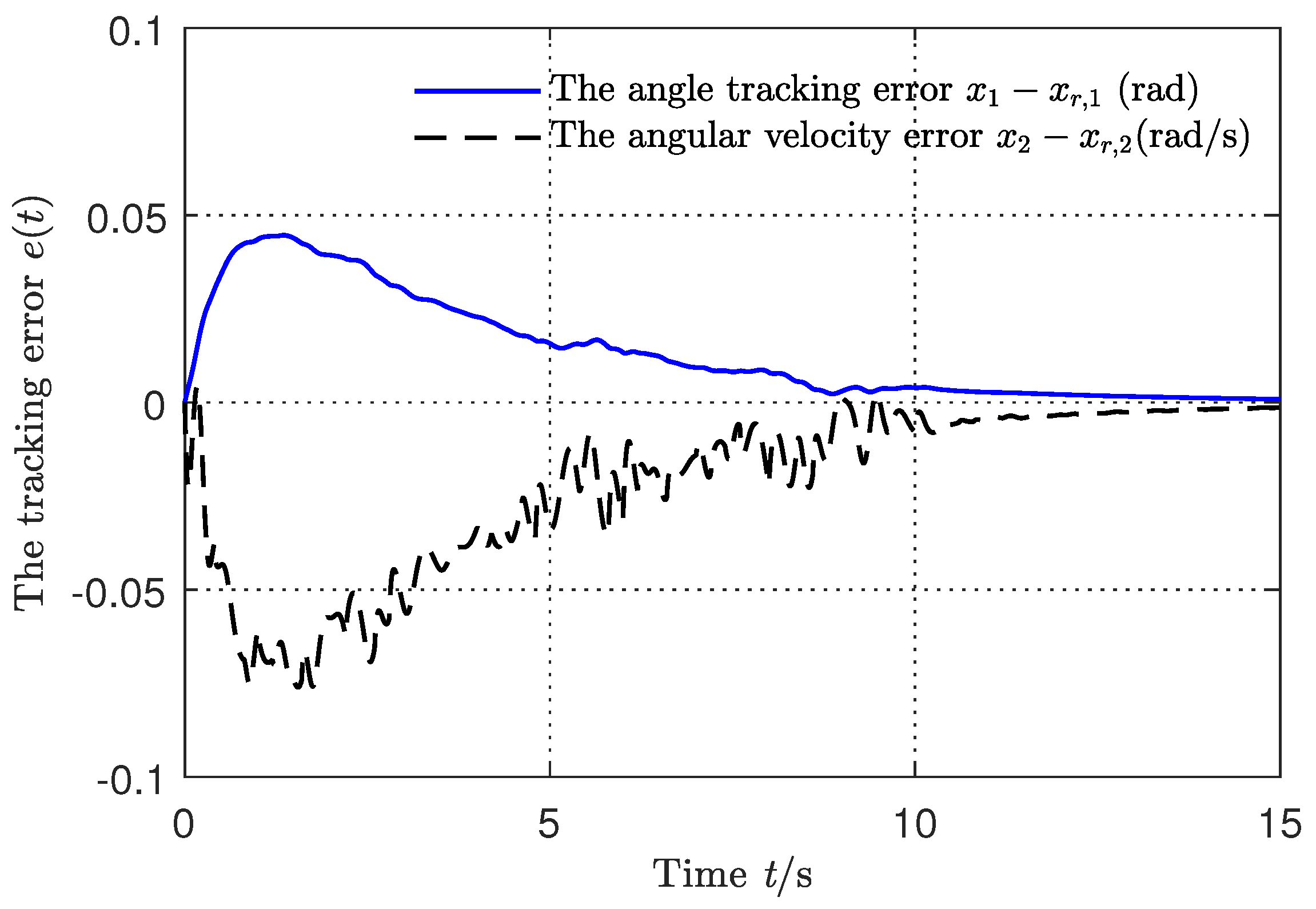
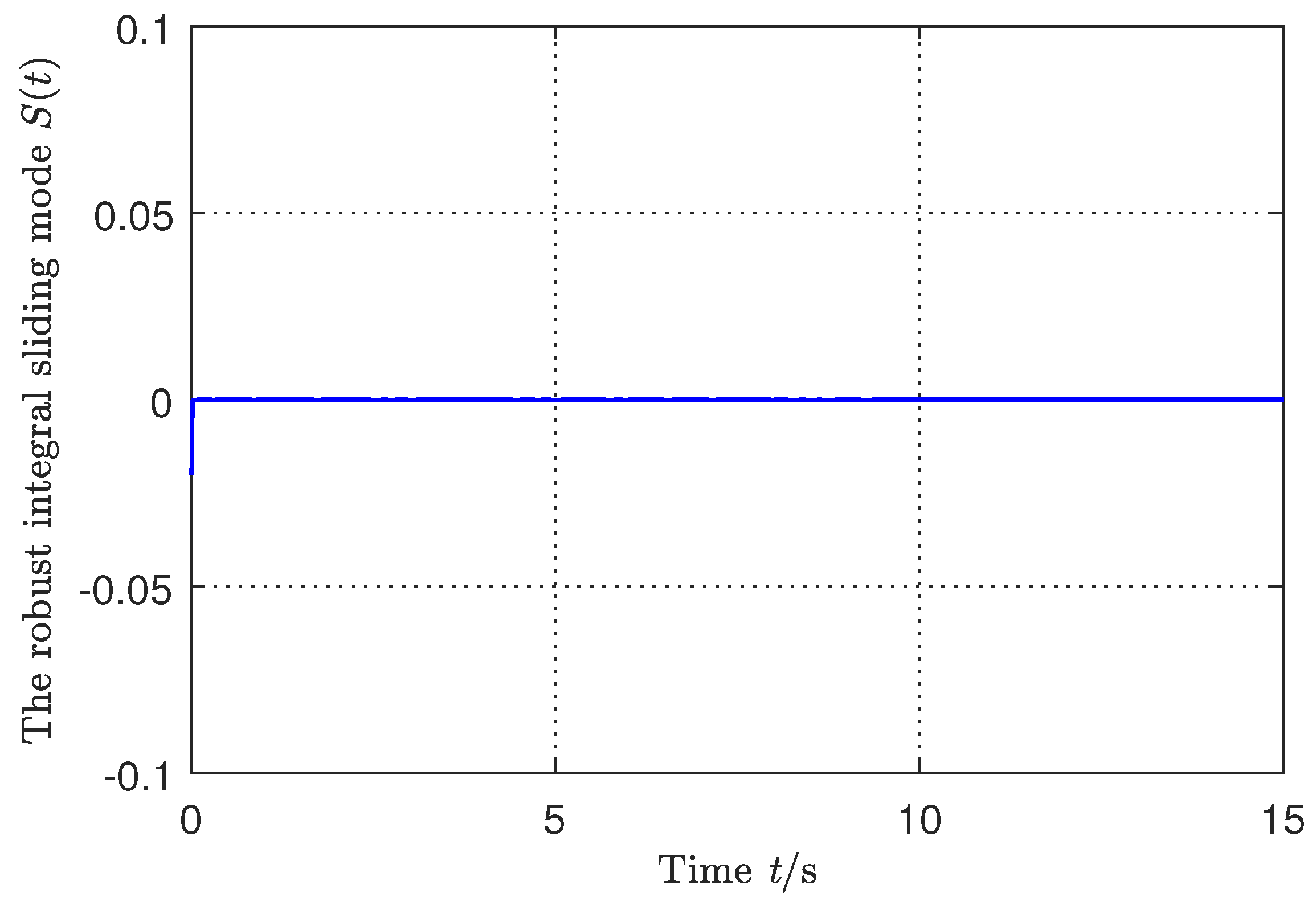
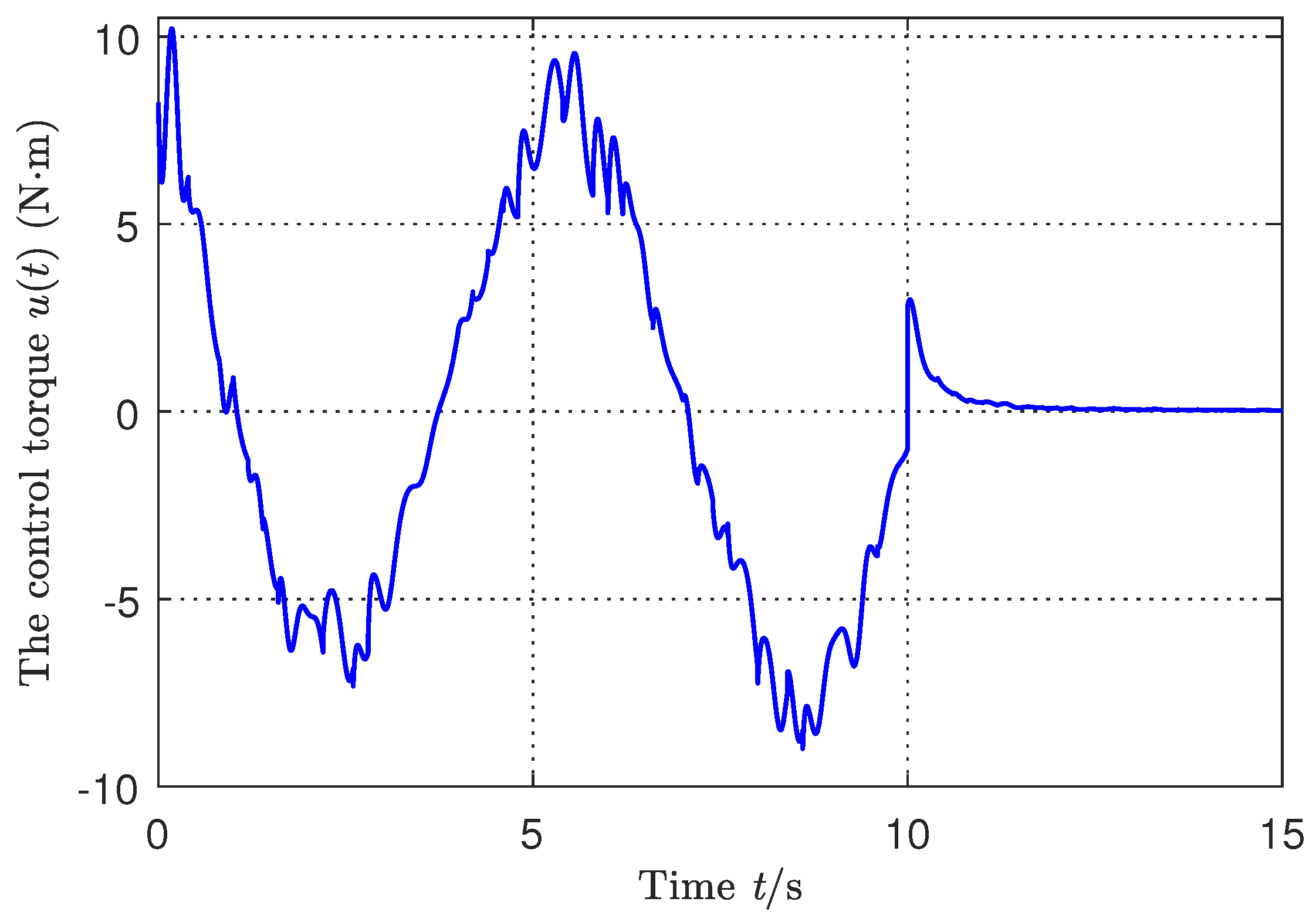
6.2. Example 2: A Manipulator
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liberzon, D. Switching in Systems and Control; Birkhauser: Boston, MA, USA, 2003. [Google Scholar]
- Margaliot, M. Stability analysis of switched systems using variational principles: An introduction. Automatica 2006, 42, 2059–2077. [Google Scholar] [CrossRef]
- Wu, L.; Shi, P.; Su, X. Sliding Mode Control of Uncertain Parameter-Switching Hybrid Systems; John Wiley & Sons: Hoboken, NJ, USA, 2014. [Google Scholar]
- Wang, Y.; Zhao, J. Neural-network-based event-triggered sliding mode control for networked switched linear systems with the unknown nonlinear disturbance. IEEE Trans. Neural Netw. Learn. Syst. 2023, 34, 3885–3896. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Zhang, Y.; Zhao, X. Event-triggered adaptive dynamic programming for hierarchical sliding-mode surface-based optimal control of switched nonlinear systems. IEEE Trans. Autom. Sci. Eng. 2024, 21, 4851–4863. [Google Scholar] [CrossRef]
- Qi, W.; Zhang, N.; Ahn, C.K.; Zong, G. Genetic-algorithm-based sliding mode stabilization for networked switched systems with unreliable channels. IEEE Trans. Control. Netw. Syst. 2024. early access. [Google Scholar] [CrossRef]
- Wang, T.; Niu, B.; Xu, N.; Zhang, L. ADP-based online compensation hierarchical sliding-mode control for partially unknown switched nonlinear systems with actuator failures. ISA Trans. 2024, in press. [Google Scholar] [CrossRef] [PubMed]
- Hou, T.; Li, Y.; Lin, Z. Local and global stabilization of switched linear systems with actuator saturation. IEEE Trans. Autom. Control. 2023, 68, 1192–1199. [Google Scholar] [CrossRef]
- Wang, J.; Wu, J.; Shen, H.; Cao, J.; Rutkowski, L. Fuzzy H∞ control of discrete-time nonlinear Markov jump systems via a novel hybrid reinforcement q-learning method. IEEE Trans. Cybern. 2023, 53, 7380–7391. [Google Scholar] [CrossRef]
- Wang, J.; Wang, D.; Yan, H.; Shen, H. Composite antidisturbance H∞ control for hidden Markov jump systems with multi-sensor against replay attacks. IEEE Trans. Autom. Control. 2024, 69, 1760–1766. [Google Scholar] [CrossRef]
- Wang, Z.; Sun, J.; Chen, J. Stability analysis of switched nonlinear systems with multiple time-varying delays. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 3947–3956. [Google Scholar] [CrossRef]
- Jiang, B.; Karimi, H.R.; Zhang, X.; Wu, Z. Adaptive neural-network-based sliding mode control of switching distributed delay systems with Markov jump parameters. Neural Netw. 2023, 165, 846–859. [Google Scholar] [CrossRef]
- Wang, X.; Ma, Y. Adaptive non-fragile sliding mode control for switched semi-Markov jump system with time-delay and attack via reduced-order method. Appl. Math. Comput. 2023, 440, 127670. [Google Scholar] [CrossRef]
- Fei, Z.; Wu, Z.; Zhao, X.; Zong, G.; Lin-Shi, X. Reachability-guaranteed sliding mode control for asynchronously switched uncertain systems. IEEE Trans. Autom. Control. 2024. early access. [Google Scholar] [CrossRef]
- Utkin, V.I.; Shi, J. Integral sliding mode in systems operating under uncertainty conditions. In Proceedings of the 35th IEEE Conference on Decision and Control, Kobe, Japan, 13 December 1996; pp. 4591–4596. [Google Scholar] [CrossRef]
- Cao, W.J.; Xu, J.X. Nonlinear integral-type sliding surface for both matched and unmatched uncertain systems. IEEE Trans. Autom. Control. 2004, 49, 1355–1360. [Google Scholar] [CrossRef]
- Kchaou, M.; Al Ahmadi, S. Robust H∞ control for nonlinear uncertain switched descriptor systems with time delay and nonlinear input: A sliding mode approach. Complexity 2017, 2017, 1027909. [Google Scholar] [CrossRef]
- Chen, H.; Lim, C.C.; Shi, P. Robust H∞-based control for uncertain stochastic fuzzy switched time-delay systems via integral sliding mode strategy. IEEE Trans. Fuzzy Syst. 2022, 30, 382–396. [Google Scholar] [CrossRef]
- Song, L.; Tong, S. Observer-based integral sliding mode control with switching gains for fuzzy impulsive stochastic systems. IEEE Trans. Fuzzy Syst. 2024, 32, 1078–1086. [Google Scholar] [CrossRef]
- Niu, S.; Chen, W.H.; Lu, X.; Xu, W. Integral sliding mode control design for uncertain impulsive systems with delayed impulses. J. Frankl. Inst. 2023, 360, 13537–13573. [Google Scholar] [CrossRef]
- Ferrara, A.; Incremona, G.P.; Sangiovanni, B. Tracking control via switched integral sliding mode with application to robot manipulators. Control. Eng. Pract. 2019, 90, 257–266. [Google Scholar] [CrossRef]
- Qi, W.; Gao, X.; Ahn, C.K.; Cao, J.; Cheng, J. Fuzzy integral sliding-mode control for nonlinear semi-Markovian switching systems with application. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 1674–1683. [Google Scholar] [CrossRef]
- Zhang, X.; Xiao, L.; Li, H. Robust control for switched systems with unmatched uncertainties based on switched robust integral sliding mode. IEEE Access 2020, 8, 138396–138405. [Google Scholar] [CrossRef]
- Zhang, X. Robust integral sliding mode control for uncertain switched systems under arbitrary switching rules. Nonlinear Anal. Hybrid Syst. 2020, 37, 100900. [Google Scholar] [CrossRef]
- Kao, Y.; Liu, X.; Song, M.; Zhao, L.; Zhang, Q. Nonfragile-observer-based integral sliding mode control for a class of uncertain switched hyperbolic systems. IEEE Trans. Autom. Control. 2022, 68, 5059–5066. [Google Scholar] [CrossRef]
- Wang, C.; Li, R.; Su, X.; Shi, P. Output feedback sliding mode control of Markovian jump systems and its application to switched boost converter. IEEE Trans. Circuits Syst. Regul. Pap. 2021, 68, 5134–5144. [Google Scholar] [CrossRef]
- Zhang, X.; Xiao, L.; Tan, R.; Liu, W. Bumpless Transfer Control Design of Continuous Integral Sliding Mode Switching Controller for Turbofan Aeroengine. In Proceedings of the 2022 IEEE 17th International Conference on Control and Automation (ICCA), Naples, Italy, 27–30 June 2022; pp. 868–873. [Google Scholar] [CrossRef]
- Wang, Y.; Xie, L.; de Souza, C.E. Robust control of a class of uncertain nonlinear systems. Syst. Control. Lett. 1992, 19, 139–149. [Google Scholar] [CrossRef]
- Shi, J.; Zhao, J. State bumpless transfer control for a class of switched descriptor systems. IEEE Trans. Circuits Syst. Regul. Pap. 2021, 68, 3846–3856. [Google Scholar] [CrossRef]
- Richter, H. Advanced Control of Turbofan Engines; Springer: New York, NY, USA, 2014. [Google Scholar]
- Zhao, Y.; Fu, J.; Zhao, J. Bumpless transfer control for switched systems and its application to aeroengines. ACTA Autom. Sin. 2020, 46, 2165–2176. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Xiong, S.; Guo, R. Robust Bumpless Transfer Control for Switched Systems with Unmatched Uncertainties Based on the Common Robust Integral Sliding Mode Under Arbitrary Switching Rules. Mathematics 2024, 12, 3504. https://doi.org/10.3390/math12223504
Zhang X, Xiong S, Guo R. Robust Bumpless Transfer Control for Switched Systems with Unmatched Uncertainties Based on the Common Robust Integral Sliding Mode Under Arbitrary Switching Rules. Mathematics. 2024; 12(22):3504. https://doi.org/10.3390/math12223504
Chicago/Turabian StyleZhang, Xiaoyu, Shuiping Xiong, and Rong Guo. 2024. "Robust Bumpless Transfer Control for Switched Systems with Unmatched Uncertainties Based on the Common Robust Integral Sliding Mode Under Arbitrary Switching Rules" Mathematics 12, no. 22: 3504. https://doi.org/10.3390/math12223504
APA StyleZhang, X., Xiong, S., & Guo, R. (2024). Robust Bumpless Transfer Control for Switched Systems with Unmatched Uncertainties Based on the Common Robust Integral Sliding Mode Under Arbitrary Switching Rules. Mathematics, 12(22), 3504. https://doi.org/10.3390/math12223504