Abstract
In this research article, we introduce a novel iterative approach that builds upon a two-step extragradient-viscosity method. This method aims to find a common element among the solution set of a variational inequality, an equilibrium problem, and the set of common fixed points from a countable family of demicontractive mappings in a Hilbert space. We offer a robust convergence theorem for the proposed iterative scheme, considering certain well-conditioned parameters. Our findings represent an improvement over similar results already available in the existing literature. Furthermore, we demonstrate the applicability of our main result to W-mappings. Lastly, we present two numerical examples to exhibit the consistency and accuracy of our devised scheme.
Keywords:
equilibrium problem; variational inequality; extragradient method; iterative method; fixed point MSC:
47H10; 47J25; 47H09; 65J15
1. Introduction
Consider a real Hilbert space H with inner product and norm . Let C denote a nonempty closed convex subset of H. A mapping is defined as nonexpansive if it satisfies the inequality for all .
In this paper, we address the equilibrium problem (EP) defined by finding a point such that:
where is a bifunction. The solution set of this equilibrium problem is denoted by : (1) holds}. Equilibrium problems have broad applications across diverse fields such as physics, optimization, finance, game theory, and economics. They encompass various models including mathematical programming, variational inequalities, complementarity problems, saddle point problems, Nash equilibrium in games, minimization problems, and fixed point problems, as referenced in the literature [1,2,3,4,5,6,7,8,9,10,11,12,13].
Setting for , where is a nonlinear operator, transforms EP (1) into the classical variational inequality problem (VIP):
introduced by Hartmann and Stampacchia [14]. The set of solutions to (2) is denoted by . Various methods for solving VIPs have been developed, such as the extragradient method (EGM) proposed by Korpelevich [15] in 1976, which generates two sequences through:
where is a parameter and is a monotone and Lipschitzian continuous operator. Subsequent improvements to EGM include the subgradient extragradient algorithm (SEGM) introduced by Censor et al. [16], which modifies the projection process to simplify computation:
The SEGM method offers computational advantages by replacing the second projection with a projection onto a half-space, under certain assumptions.
The fixed point problem (FPP), on the other hand, involves finding such that:
where is a nonlinear mapping. The solution set of (5) is denoted by .
We are also interested in finding a common solution to both VIP (2) and FPP (5), which can be expressed as:
Recent studies have explored iterative schemes for solving this combined problem. For example, Nadezhkina and Takahashi [17] proposed an iterative scheme based on EGM, which is formulated as:
where T is nonexpansive and A is monotone and L-Lipschitzian continuous. The authors showed that the sequence converges weakly to a solution of (6) (see [16,18,19,20]).
For strong convergence, Censor et al. [21] proposed a hybrid scheme combining SEGM and a method that includes:
After that, Maingé [18] proposed a hybrid extragradient-viscosity method (HEGVM) to address (6) without requiring projection onto the intersection of sets:
where A is monotone and Lipschitzian, T is demicontractive, F is an operator, and , are parameters. This method guarantees strong convergence to the unique solution of the variational inequality.
In this work, we propose a new iterative scheme for finding a common solution to the equilibrium problem (EP), variational inequality (VIP), and fixed point problem (FPP). Our method, based on the two-step extragradient-viscosity approach, aims to solve the composite problem:
where and is an operator meeting certain conditions. We present a strong convergence theorem for our scheme and demonstrate its effectiveness through numerical examples.
2. Preliminaries
Let H be a real Hilbert space. We denote weak convergence by ⇀ and strong convergence by → in H. The following identity holds:
for all and such that .
Let C be a nonempty, closed, convex subset of H. For any , there exists a unique nearest point in C, denoted by , such that
The mapping is referred to as the metric projection of H onto C, and it is known that is nonexpansive.
Lemma 1.
Let be the metric projection of H onto C. Then,
- (i)
- (ii)
Definition 1.
A mapping is called firmly nonexpansive if, for any
Lemma 2
([1]). Let C be a nonempty closed convex subset of H and be a bifunction satisfying the following conditions:
- ()
- for all ;
- ()
- ϕ is monotone, i.e., , for all ;
- ()
- For each ;
- ()
- For each is convex and weakly lower semicontinuous.
Let and . Then, there exists such that
Lemma 3
([22]). Assume satisfies the conditions ()–(). For , define a mapping by
for all . Then, the following hold:
- (i)
- is single-valued;
- (ii)
- is firmly nonexpansive;
- (iii)
- ;
- (iv)
- is closed and convex.
Definition 2.
Assume is a mapping. Then, is said to be demiclosed at zero if, for any in H, the following implication holds:
It is well known that each nonexpansive mapping is demiclosed at zero.
Definition 3.
Let be a mapping with . Then,
- (i)
- is called quasi-nonexpansive if
- (ii)
- is called β-demicontractive with if
Definition 4.
is an operator. Then,
F is called L-Lipschitzian continuous () if
F is called η-strongly monotone () if
Lemma 4
([18]). Assume that is a β-demicontractive mapping with . Then,
- (i)
- is a quasi-nonexpansive mapping over C for every . Furthermore,
- (ii)
- Fix(T) is closed and convex.
Recall that the normal cone of C at a point is defined by
Lemma 5
([23]). Let be an η-strongly monotone and L-Lipschitzian continuous mapping and . Define the mapping by
Then,
- (i)
- is a Lipschitzian continuous mapping on H with the constant .
- (ii)
- For all , we obtainfor all , where .
Definition 5.
Let C be a nonempty closed bounded subset of H. An operator is called maximal monotone on C if it is monotone on C and its graph is not a proper subset of the graph of any other monotone mapping.
Lemma 6
([24]). Let C be a nonempty closed convex subset of H and let A be a monotone and Lipschitzian continuous (even hemi-continuous) mapping of C into H with . Let Q be a mapping defined by
Then, Q is maximal monotone and .
Lemma 7
([25]). Let C be a nonempty closed bounded subset of H. Suppose
Then, for each , converges strongly to some point of C. Moreover, let T be a mapping of C into itself defined by for all . Then, .
Lemma 8
([18]). Let be a sequence of non-negative real numbers which is not decreasing at infinity in the sense that there exists a subsequence of such that for all . Then, there exists a nondecreasing subsequence of such that and the following properties are satisfied for all (sufficiently large) numbers :
In fact, for each k, is the largest number such that .
3. Main Result
Lemma 9.
Let be monotone on C and a κ-Lipschitzian continuous mapping on H, and let be a bifunction satisfying the conditions – of Lemma 2 and . Suppose that three parameters r, μ, and λ satisfy the conditions , , and . Let and
Then,
- (i)
- .
- (ii)
- for all .
Proof.
- (i)
- Since is nonexpansive and A is a -Lipschitzian mapping, we obtain
- (ii)
- Let . Noticing and , it follows from Lemma 3 (ii) that
This implies
Moreover, from the definition of v and Lemma 1 (i), we have
From , . Since A is monotone, we obtain
Therefore,
By and Lemma 1, we obtain
So, from , we have
By and Lemma 1, we obtain
Hence, from , we have
Now, we consider two cases.
Case 1. . From (21) and , the desired conclusion is proven.
Case 2. . So, since and (20), we obtain
Letting in (17), we have
Therefore, . Hence,
Adding this non-negative term to the right-hand side of inequality (23), we obtain
Since A is a -Lipschitzian mapping, we obtain
It follows from the inequality for all that
and
The proof is complete. □
Theorem 1.
Let H be a real Hilbert space and C be a nonempty closed convex subset of H. Let be an infinite family of β-demicontractive self-mappings on H with , be monotone on C and a κ-Lipschitzian continuous mapping on H, be a bifunction satisfying the conditions – of Lemma 2, and be η-strongly monotone and an L-Lipschitzian continuous mapping. Set and assume . Suppose , , , , and are real sequences satisfying the following conditions:
- ()
- ;
- ()
- and ;
- ()
- , and ;
- ()
- for some .
Let be a sequence generated by the five-layer iteration process
where the initial guess is arbitrary, , and is defined by (11) for . Suppose for any bounded subset K of H. Let T be a mapping of H into itself defined by for all such that and is demiclosed at zero. Then, the sequences , , , , and converge strongly to the unique solution of VIP (10).
Proof.
First, we claim that and are bounded. To see this, taking and noticing (27), we obtain
So,
Hence, since is -demicontractive, it follows from Lemma 4 that the operator is quasi-nonexpansive and
From , we obtain , and so,
Let be fixed. Since , we can assume that . Applying the definitions of in Lemma 5 to , we have . By Lemma 5, we obtain
where . Using Lemma 9 (ii) and (), we obtain
Also, from (29), we have
Hence, it follows from (31) that
By induction, we have
for all . Hence, is bounded, and so are , , , and . So, from Lemma 9 (ii) and (), and are bounded.
Second, we claim that
From Lemma 9 (i), we obtain
Therefore, from (29), we obtain
Let . Since and are bounded, there exists such that
Applying (35) to , we have
Now, we consider two cases.
Case 1. is nonincreasing for some integer . This implies exists. Suppose . By (36), (), and (), we derive that
This implies that . We choose a subsequence of such that
Without loss of generality, we assume . By (37), we also have . Next, we show . From the definition of and , we obtain
So, , and from (37), we obtain
Therefore, from
where , and from Lemma 7, we obtain
So, from the demiclosedness of , we have . Now, we claim that . Since , we have
By the weak lower semicontinuity of and the fact , we immediately obtain
Next, for each and , setting and using properties and , we obtain
Consequently, , which together with the monotonicity implies that . This implies, upon letting , by the lower semicontinuity property , that for each . Hence, . Now, we will prove that . Let and
where is the normal cone of C. By the monotonicity and Lipschitzian continuity of A, Lemma 6 ensures that O is maximal monotone and . For every in the graph of O, i.e., , we have . From the definition of , we obtain
Taking in (40), one has
From (27) and Lemma 1, we find
Hence,
Thus, it follows from (37) and that
Letting in (43) and using (44), (45), and , we have for all . Therefore, by the maximal monotonicity of O and Lemma 6, we find . So, .
On the other hand, since F is -strongly monotone, we have
Suppose that . Then, from (47), there exists such that
Hence, from (34), we obtain
for all . Thus, for all . So, . From and , we have . This is a contradiction, and hence, . Therefore, .
Case 2. is not nonincreasing at infinity. In this case, from Lemma 8, there exists a nondecreasing sequence of such that and the following inequalities hold:
for all . Next, we prove . In similar way as in Case 1, we have
With no loss of generality, we may assume as such that
Moreover, repeating the relevant part of the proof of Case 1, we also obtain . Now, we prove . From (34), we obtain
This together with (), (), and (48) implies that
So, since F is -strongly monotone, we have
Since , we also obtain . Thus, using (49), we obtain . Hence, . It turns out that . The proof is complete. □
Corollary 1.
Let all the assumptions of Theorem 1 hold except the bifunction and [instead of ]. Then, the sequences , , , and defined by
where the initial guess is arbitrary, converge strongly to the unique solution of VIP (10).
Remark 1.
Corollary 1 is a generalization of ([26] Theorem 3.1) in the sense that the old theorem is established just for a single β-demicontractive mapping, but Corollary 1 is established for a sequence of β-demicontractive mappings.
Remark 2.
Theorem 1 and Corollary 1 remain true when is an infinite family of quasi-nonexpansive mappings because every quasi-nonexpansive mapping is a β-demicontractive mapping.
Remark 3.
Since every nonexpansive mapping is a β-demicontractive mapping, Theorem 1 and Corollary 1 remain true when is an infinite family of nonexpansive self-mappings on H. Moreover, it is not necessary for to be demiclosed at zero, where T is a mapping of H into itself defined by for all , because every nonexpansive mapping is demiclosed at zero.
4. Application
Let be a sequence of nonexpansive self-mappings on H and a sequence of non-negative numbers in . For any , define a mapping of H into itself as follows:
Such a mapping is called the W-mapping generated by and ; see [27].
Lemma 10
([28]). Let C be a nonempty closed convex subset of a strictly convex Banach space X, a sequence of nonexpansive self-mappings on C such that , and a sequence of positive numbers in for some . Then, for every and , the limit exists.
Using Lemma 10, one can define the mapping as follows:
for every . Such a W is called the W-mapping generated by and .
Throughout this section, we assume is a sequence of positive numbers in for some .
Lemma 11
([28]). Let C be a nonempty closed convex subset of a strictly convex Banach space X, a sequence of nonexpansive self-mappings on C such that , and a sequence of positive numbers in for some . Then, .
Theorem 2.
Let H be a real Hilbert space and C be a nonempty closed convex subset of H. Let be monotone on C and a κ-Lipschitzian continuous mapping on H, be a bifunction satisfying the conditions – of Lemma 2, and be η-strongly monotone and an L-Lipschitzian continuous mapping. Set and assume . Suppose , , , , and are real sequences satisfying conditions ()–() of Theorem 1. Let be a sequence generated by the five-layer iteration process
where the initial guess is arbitrary and . Then, the sequences , , , , and converge strongly to the unique solution of VIP (10).
5. Numerical Test
In this section, first we give a numerical example to illustrate the convergence of algorithm (27) in Theorem 1. Next, we give another numerical example for (27) to compare its behavior with the iterative method (9) of Hieu et al. [26].
Example 1.
Let and define . It is easy to verify that ϕ satisfies the conditions –. First, we deduce a formula for . For any and ,
Set . Then, is a quadratic function of y with coefficients
Therefore, , which yields . So, from Lemma 3, we obtain . Let , and for all . Suppose with , , , and . Hence, . Then, from Theorem 1, the sequence , generated iteratively by
converges strongly to the unique solution 0 of VIP (10).
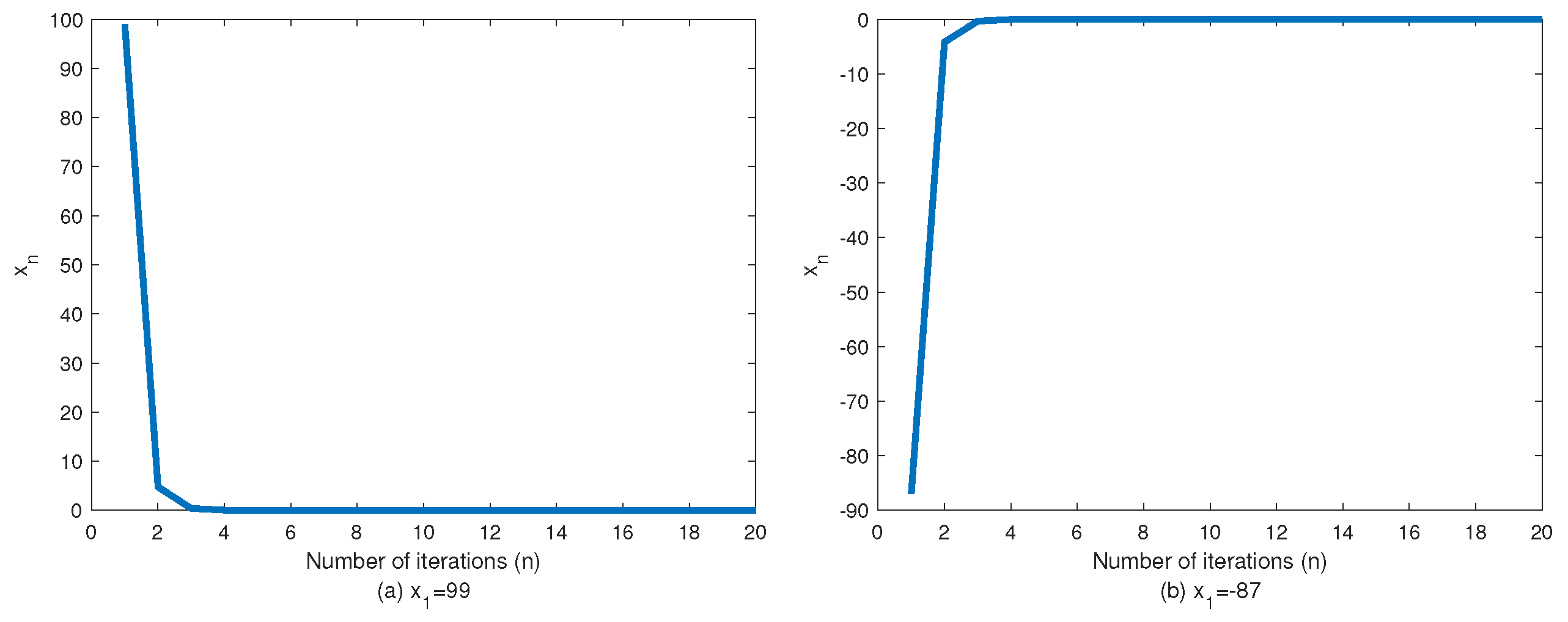
In the following, we provide numerical results for two suitable initial points.
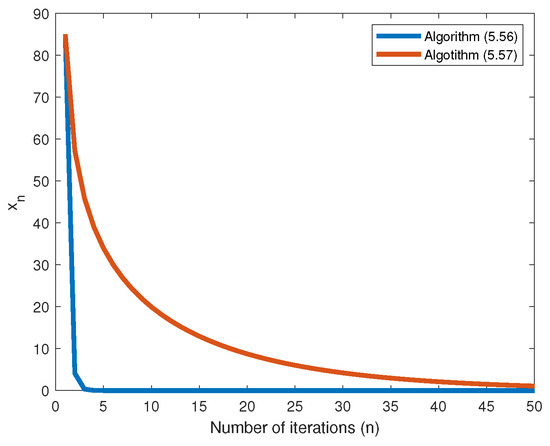
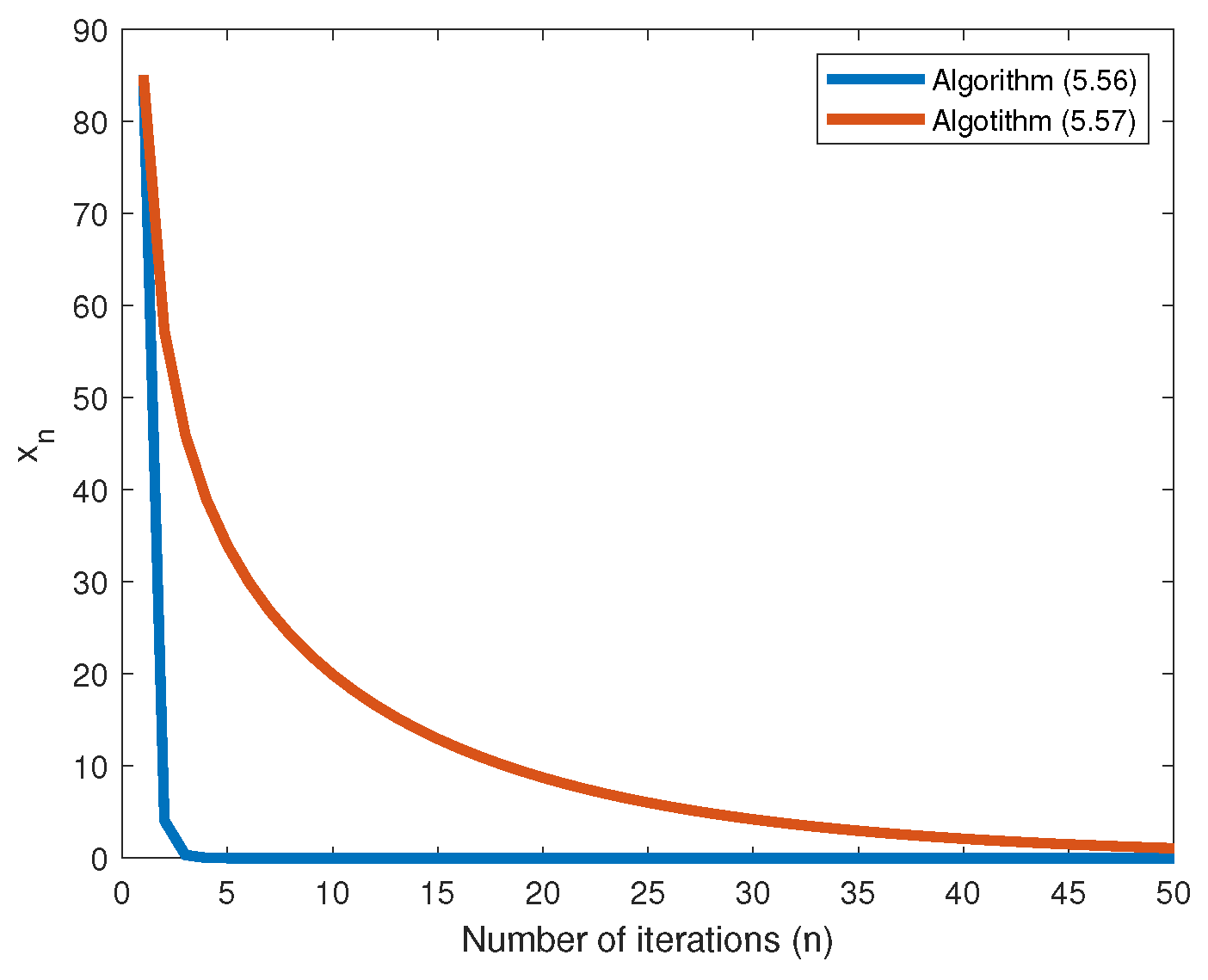
Now, we will compare the effectiveness of our algorithm with algorithm (9) via a numerical example.
Example 2.
Let all the assumptions of Example 1 hold except the mappings for all . First, suppose the sequence is generated by (27). Then, the scheme (27) can be simplified as
Therefore, the sequence converges strongly to 0 by Theorem 1. Next, let the sequence be generated by (9). Then, the scheme (9) can be simplified as
Therefore, the sequence converges strongly to 0 by Theorem 1.
Table 1 and Table 2 and Figure 1 and Figure 2 show that the sequence generated by the above algorithms converges to 0.

Table 1.
The values of the sequence for Algorithm (27).
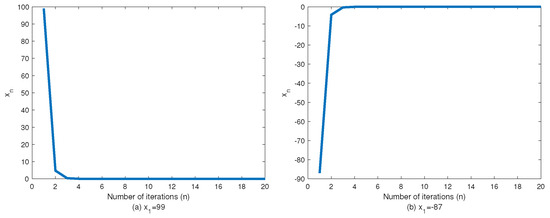
Figure 1.
The convergence of with different initial values .
Author Contributions
Writing–original draft, M.Y. and S.H.S.; Writing–review & editing, M.Y. and S.H.S. Authors have the same contributions in writing the paper. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
Data are contained within the article.
Acknowledgments
A part of this research was carried out while the second author was visiting the University of Alberta.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Blum, E.; Oettli, W. From optimization and variatinal inequalities to equilibrium problems. Math. Stud. 1994, 63, 123–145. [Google Scholar]
- Daniele, P.; Giannessi, F.; Mougeri, A. (Eds.) Equilibrium Problems and Variational Models. Nonconvex Optimization and Its Application; Kluwer Academic Publications: Norwell, Australia, 2003; Volume 68. [Google Scholar]
- Sababe, S.H.; Yazdi, M. A hybrid viscosity approximation method for a common solution of a general system of variational inequalities, an equilibrium problem, and fixed point problems. J. Comput. Math. 2023, 41, 153–172. [Google Scholar]
- Hieu, D.V. An extension of hybrid method without extrapolation step to equilibrium problems. J. Ind. Manag. Optim. 2017, 13, 1723–1741. [Google Scholar] [CrossRef]
- Khuangsatung, W.; Kangtunyakarn, A. Iterative approximation method for various nonlinear mappings and equilibrium problems with numerical example. Rev. Real Acad. Cienc. Exactas Físicas Nat. Ser. A Mat. 2017, 111, 65–88. [Google Scholar] [CrossRef]
- Migot, T.; Cojocaru, M.-G. A parametrized variational inequality approach to track the solution set of a generalized nash equilibrium problem. Eur. J. Oper. Res. 2020, 283, 1136–1147. [Google Scholar] [CrossRef]
- Moudafi, A. Second order differential proximal methods for equilibrium problems. J. Inequal. Pure Appl. Math. 2003, 4, 1–7. [Google Scholar]
- Munkong, J.; Dinh, B.V.; Ungchittrakool, K. An inertial multi-step algorithm for solving equilibrium problems. J. Nonlinear Convex Anal. 2020, 21, 1981–1993. [Google Scholar]
- Wang, S.; Hu, C.; Chia, G. Strong convergence of a new composite iterative method for equilibrium problems and fixed point problems. Appl. Math. Comput. 2010, 215, 3891–3898. [Google Scholar] [CrossRef]
- Yazdi, M.; Hashemi Sababe, S. A new extragradient method for equilibrium, split feasibility and fixed point problems. J. Nonlinear Convex Anal. 2021, 22, 759–773. [Google Scholar]
- Yazdi, M.; Hashemi Sababe, S. Strong convergence theorem for a general system of variational inequalities, equilibrium problems, and fixed point problems. Fixed Point Theory 2022, 23, 763–778. [Google Scholar] [CrossRef]
- Yazdi, M.; Sababe, S.H. On a new iterative method for solving equilibrium problems and fixed point problems. Fixed Point Theory 2024, 25, 419–434. [Google Scholar] [CrossRef]
- Yao, Y.; Postolache, M.; Yao, C. An iterative algorithm for solving the generalized variational inequalities and fixed points problems. Mathematics 2019, 7, 61. [Google Scholar] [CrossRef]
- Hartman, P.; Stampacchia, G. On some non-linear elliptic differential-functional equation. Acta Math. 1966, 115, 271–310. [Google Scholar] [CrossRef]
- Korpelevich, G.M. The extragradient method for finding saddle points and other problems. Ekon. Mat. Metod. 1976, 12, 747–756. [Google Scholar]
- Censor, Y.; Gibali, A.; Reich, S. The subgradient extragradient method for solving variational inequalities in Hilbert space. J. Optim. Theory Appl. 2011, 148, 318–335. [Google Scholar] [CrossRef]
- Nadezhkina, N.; Takahashi, W. Weak convergence theorem by an extragradient method for nonexpansive mappings and monotone mappings. J. Optim. Theory Appl. 2006, 128, 191–201. [Google Scholar] [CrossRef]
- Maingé, P.E. A hybrid extragradient-viscosity method for monotone operators and fixed point problems. SIAM J. Control Optim. 2008, 47, 1499–1515. [Google Scholar] [CrossRef]
- Takahashi, S.; Toyoda, M. Weak convergence theorems for nonexpansive mappings and monotone mappings. J. Optim. Theory Appl. 2003, 118, 417–428. [Google Scholar] [CrossRef]
- Zeng, L.C.; Yao, J.C. Strong convergence theorem by an extragradient method for fixed point problems and variational inequality problems. Taiwan. J. Math. 2006, 10, 1293–1303. [Google Scholar] [CrossRef]
- Censor, Y.; Gibali, A.; Reich, S. Strong convergence of subgradient extragradient methods for the variational inequality problem in Hilbert space. Optim. Methods Softw. 2011, 26, 827–845. [Google Scholar] [CrossRef]
- Combettes, P.I.; Hirstoaga, S.A. Equilibrium programming in Hilbert spaces. J. Nonlinear Convex Anal. 2005, 6, 117–136. [Google Scholar]
- Yamada, I. The Hybrid Steepest Descent Method for the Variational Inequality Problem over the Intersection of Fixed Point Sets of Nonexpansive Mappings. In: Inherently Parallel Algorithms for Feasibility and Optimization and Their Applications. Stud. Comput. Math. 2004, 8, 473–504. [Google Scholar]
- Rockafellar, R.T. On the maximality of sums of nonlinear monotone operators. Trans. Am. Math. Soc. 1970, 149, 75–88. [Google Scholar] [CrossRef]
- Aoyama, K.; Kimura, Y.; Takahashi, W.; Toyoda, M. Approximation of common fixed points of a countable family of nonexpansive mappings in a Banach space. Nonlinear Anal. 2007, 67, 2350–2360. [Google Scholar] [CrossRef]
- Hieu, D.V.; Son, D.X.; Anh, P.K.; Muu, L.D. A two-step extragradient-viscosity method for variational inequalities and fixed point problems. Acta Math. Vietnam. 2019, 44, 531–552. [Google Scholar] [CrossRef]
- O’Hara, J.G.; Pillay, P.; Xu, H.K. Iterative approaches to convex feasibility problems in Banach spaces. Nonlinear Anal. 2006, 64, 2022–2042. [Google Scholar] [CrossRef]
- Shimoji, K.; Takahashi, W. Strong convergence to common fixed points of infinite nonexpansive mappings and applications. Taiwan. J. Math. 2001, 5, 387–404. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).