1. Introduction
In the past decade, fractional differential equations have received increasing attention from researchers. On the one hand, this is due to the development of fractional calculus theory itself, and on the other hand, it is due to the widespread application of fractional differential equations in various disciplines. Anomalous diffusion is almost ubiquitous in nature [
1,
2]. Many researchers have found that fractional differential equations can provide more suitable mathematical models to describe anomalous diffusion and the transport dynamics of complex systems [
3,
4].
In physics, the fractional diffusion equation describes diffusion in media with fractal geometry [
5]. The fractional wave equation controls the propagation of mechanical diffusion waves in viscoelastic media that exhibit a power-law creep [
6]. The fractional diffusion-wave equation can be used to describe hyperdiffusion phenomenon. The space-time fractional diffusion-wave equation is an extension of the classical diffusion wave equation, which is used to simulate practical diffusion and wave phenomena in fluid flow, oil strata and other situations.
When solving a practical problem, the initial values, diffusion coefficients, source terms, or partial boundary values of the problem are unknown and require some measurement data to invert them, which constitutes the inverse problem. The identification of an unknown source in an inverse problem is widely used in engineering science. In environmental protection engineering, source term identification can accurately estimate the location and intensity of pollution sources [
7]. In an environment with an increasing energy shortage, source term identification helps to find new energy. A variety of regularization methods are proposed by scholars to deal with inverse problems, which include, for example, the Tikhonov regularization method [
8,
9], Fourier regularization method [
10,
11], Quasi-boundary value regularization method [
12,
13], Quasi-reversibility regularization method [
14,
15], truncation regularization method [
16,
17], Landweber iterative regularization method [
18,
19], etc. This paper will use the Tikhonov regularization method and Quasi-boundary regularization method to deal with the problem of source term identification.
Some research has been conducted on the direct problem of space-time fractional diffusion-wave equation. Luchko [
20] utilized the technique of the Mellin integral transform to derive the fundamental solution of the linear multidimensional space-time fractional diffusion wave equation in the form of a Mellin–Barnes integral. Dehghan et al. [
21] applied a high-order numerical scheme to solve the space-time tempered fractional diffusion-wave equation, and proved the unconditional stability and convergence of the method. Garg et al. [
22] made use of a matrix method to solve space-time fractional diffusion-wave equations with three space variables, and the solutions of classical, time-fractional, space-fractional, and space-time fractional wave equations were given. Bhrawy et al. [
23] solved the two-sided space and time Caputo space-time fractional diffusion-wave equation with various types of nonhomogeneous boundary conditions with an accurate spectral tau method.
Until now, the research on the inverse problem of fractional diffusion equation has been relatively mature. Huang et al. [
24] solved the Cauchy problem of the space-time fractional diffusion equation, and explicit expression of the Green function was given. Tatar et al. [
25] proposed a discrete numerical method based on the minimization problem, the steepest descent method and the least square method, and the numerical method was used to solve the nonlocal inverse source problem of the one-dimensional space-time fractional diffusion equation. Wang et al. [
26] solved the inverse initial value problem for a time fractional diffusion equation with the Tikhonov regularization method. However, at present, the research on the inverse problem of the time fractional diffusion-wave equation is relatively limited [
27,
28]. The research on the inverse problem of the diffusion-wave equation with both time and space fractional derivatives is scarce and therefore worth investigating. In this paper, we consider the inverse source problem of the space-time fractional diffusion-wave equation, and derive the prior and posterior error estimates of the exact solution and these regularization solutions, respectively.
We consider the following space-time fractional diffusion-wave equation [
29]:
where
is a bounded domain in
with sufficient glossy boundary
,
is a final time,
,
.
and
are the initial data defined on
, and
is the Caputo operator for a fractional derivative of the order
defined by [
30]
where
represents a Gamma function. The operator
is a fractional Laplace operator defined by [
31]
where
.
In Equation (
1), the source term
is unknown. The main goal of this inverse problem is to identify the spatial source term
through the final data
. In practice,
is obtained through measurement. We assume that the exact data
and the measurement data
satisfy
It can be found that the small perturbation of the measurement data will lead to a significant change in the source term , and this change has made the solution obtained by the usual method meaningless. The reason for this phenomenon is the ill-posedness of the inverse problem. Regularization methods can be applied to solve this ill-posed problem.
This paper is divided into seven sections. In
Section 2, we provide some preliminary results. The solution of Equation (
1), ill-posedness and the conditional stability about the source term identification problem are derived in
Section 3. In
Section 4, we propose the Tikhonov regularization method to restore the stability of the solution, and provide the convergence error estimations of the source term under the prior and posterior regularization parameter selection rules. In
Section 5, we propose the Quasi-boundary regularization method to restore the stability of the solution, and provide the convergence error estimations of the source term under the prior and posterior regularization parameter selection rules. Several numerical examples are given to demonstrate the effectiveness and stability of the Tikhonov regularization method and the Quasi-boundary regularization method in
Section 6. In the final section, we provide a brief conclusion.
3. Ill-Posed Analysis and Conditional Stability
In this section, we provide some results that are very useful for our main conclusions. Using the separation of variables and Laplace transform of the Mittag–Leffler function, we obtain the solution for (
1) as follows:
where
,
,
are Fourier coefficients.
Using
, we can get
and
where
is a Fourier coefficient.
Thus, the exact solution of the problem can be expressed as
Let us denote
then we have
Now, we put the definition of
into (
17). It is easy to see that Equation (
1) becomes the following operator equation
i.e.,
where
is a linear operator,
is a Fourier coefficient. Letting
be the adjoint of
K, since
are orthonormal in
, it is easy to verify
Hence, the singular value of
K is
. The source term is
Thus,
Since
, we have
, a small perturbation of
will cause a significant change in the source term
. So the Equation (
1) is ill-posed.
Next, we give an a priori bound for the exact solution
,
where
,
are constants.
Theorem 1. Supposing satisfies the priori bound condition (22), then we have Proof. By the Hölder inequality, we have
□
4. Tikhonov Regularization Method and Convergence Error Estimation
In this section, we aim to use the Tikhonov regularization method to overcome the Equation (
1) and give the Tikhonov regularization solution. And the error estimates of the Tikhonov regularization method under prior parameter selection and posterior parameter selection rules are provided, respectively.
Consider the following operator equation:
In the finite dimensional space, when the overdetermined linear algebra equation is approximately solved, the method is to find the least square solution, that is, the minimization continuous functional on the finite dimensional space X. The problem must have a solution.
However, if
is a compact linear operator with a non closed range between
X and
Y in Hilbert space, then the generalized solution of (
24) is given by
, and
is the Moore–Penrose inverse (generalized inverse) of the operator
K. In practical application,
h may be contaminated by some external noise and it appears as noisy data,
, such that
, where
is the noise level. Since the range of
K is not closed, the generalized inverse
is not continuous, which means,
does not converge to
when
tends to
h as
. In this case, the minimization problem is ill-posed.
Therefore, a penalty term must be added to the objective function so that the problem of finding the minimal element of the new objective function is well-posed (from the perspective of optimization theory). Alternatively, the equation that the minimal element satisfies is a second kind of equation (from the perspective of integral equation theory). This is the basic idea of the Tikhonov regularization method to solve ill-posed problems.
The Tikhonov regularization method takes the minimal element
of the regularization functional
as the regularization approximate solution of
.
is uniquely determined by
where
is the regularization parameter, and
is the self-adjoint operator of
K.
By the singular value of the linear operator
K, we can obtain the Tikhonov regularization solution of the spatial source term without error
where
. For the noisy data
We have the Tikhonov regularization solution of the spatial source term with error
where
is Fourier coefficient.
4.1. The Priori Convergence Error Estimate
The convergence error estimate for the above the Tikhonov regularization solution can be obtained under the priori regularization parameter choice rule.
Theorem 2. Let be given by (20) and be given by (29). Suppose that satisfies the a priori bounded condition (22). Then we have - (1)
If and the regularization parameter is selected, then we have - (2)
If and the regularization parameter is selected, then we have where , .
Proof. By the triangle inequality, we have
Firstly, we give an estimate for the first term. From (
27) and (
29), we have
Then, we estimate the second term by (
20), (
22) and (
27), and Lemmas 4 and 5,
where
.
Letting
, from Lemma 5, we obtain
where
,
.
Combining (
33) and (
35), we choose the regularization parameter
by
The proof is completed. □
4.2. The Posteriori Convergence Error Estimate
The priori parameter choice is based on the priori bound of exact solution. However, in practice the priori bound generally can not be known easily. Now, we consider a posterior regularization parameter choice rule called the Morozov discrepancy principle. Based on the conditional stability estimate in Theorem 1, we can obtain the posteriori convergence error estimate of the source term.
The Morozov discrepancy principle here is to find
such that
where
is a constant. From the following lemma, there exists a unique solution for (
38) if
.
Lemma 9. Letting , the following results hold
- (a)
is a continuous function;
- (b)
- (c)
- (d)
is a strictly increasing function over .
Proof. The Lemma can be easily proven with the expression
□
Theorem 3. Let be given by (20) and be given by (29). Supposing that satisfies the a priori bounded condition (22), the selection of the regularization parameter is given by the Morozov discrepancy principle (38). Then we have - (1)
If and the regularization parameter is selected, then we have - (2)
If and the regularization parameter is selected, then we have where , .
Proof. By the triangle inequality, we have
where
. Let
, from Lemma 6, we obtain
where
,
. Thus,
Substituting (
44) into (
33), we have
Then, we give an estimate for the second term of (
41). From (
20) and (
27), we know that
Applying the a priori bound condition (
22), we obtain
By Theorem 1, we deduce that
Combining (
45) and (
47), we have
□
5. Quasi-Boundary Regularization Method and Convergence Error Estimation
In this section, we aim to use the Quasi-boundary regularization method to solve the Equation (
1), and give the Quasi-boundary regularization solution. And the error estimates of the Quasi-boundary regularization method under prior parameter selection and posterior parameter selection rules are provided, respectively.
The Quasi-boundary regularization method replaces the local boundary condition or terminal condition of the original problem with nonlocal conditions. Then, we solve the new problem to obtain a Quasi-boundary regularization solution.
Let
be the Quasi-boundary regularization solution of the following problem
where
is the regularization parameter. Using the separated variable method, the Laplace transformation and the inverse transformation, we have
According to , we obtain .
On the other hand, according to formula (
50) when
, we obtain
We have the Quasi-boundary regularization solution of the spatial source term with error
where
. Thus, we obtain the regularization solution of the spatial source term without error
where
.
5.1. The Priori Convergence Error Estimate
The convergence error estimate for the above Quasi-boundary regularization solution can be obtained under the priori regularization parameter choice rule.
Theorem 4. Let be given by (20) and be given by (54). Supposing that satisfies the a priori bounded condition (22), then we have - (1)
If and the regularization parameter is selected, then we have - (2)
If and the regularization parameter is selected, then we have where , .
Proof. With the triangular inequality, we obtain
We first give an estimate of the first term of (
58). Through (
53)–(
55), we have
Now, we estimate the second term of formula
. Using
,
and
, and Lemma 4, we can deduce
where
. Let
, from Lemma 7, we obtain
where
,
.
Combining (
59) and (
61), we choose the regularization parameter
by
The proof of Theorem 4 is completed. □
5.2. The Posteriori Convergence Error Estimate
In this section, we consider a posterior regularization parameter choice rule called the Morozov discrepancy principle. We can obtain the posteriori convergence error estimate of the source term under the selection rules for the posteriori regularization parameters.
The Morozov discrepancy principle here is to find
such that
where
is a constant. From the following lemma, there exists a unique solution for (
64) if
.
Lemma 10. Letting , the following results hold
- (a)
is a continuous function;
- (b)
- (c)
- (d)
is a strictly increasing function over
Proof. The Lemma can be easily proven with the expression
□
Theorem 5. Let be given by (20) and be given by (54). Suppose that satisfies the a priori bounded condition (22), the selection of the regularization parameter is given by the Morozov discrepancy principle (64), then we have - (1)
If , we have the following error convergent estimate - (2)
If , we have the following error convergent estimate where , .
Proof. With the triangular inequality, we have
We first give an estimate of the first term of
. Using
and
, we obtain
Applying the prior bound condition
, we have
where
. Let
, from Lemma 8, we obtain
where
,
.
Substituting
into
, we have
Now, we estimate the second term of formula
by
,
,
,
,
Therefore, we deduce that
Combining
and
, we have
□
6. Numerical Implementation and Numerical Examples
In this section, we present some numerical results to show the effectiveness of our proposed schemes.
We suppose
,
,
,
,
. Consider the following problem
We solve the above equation by a finite difference method to obtain the “exact” . The split time and space variables are and . Thus, , , and the approximate value of the unknown function is denoted as . By direct calculation, we have the eigenvalues and for .
The discrete form of the time fractional derivative is as follows [
33]:
where
,
,
The fractional Laplace operator is
. We approximate the space derivatives by
We suppose
,
. There is the following iteration format
where
here,
.
here,
,
.
By solving the above discrete format and taking with MATLAB version R2018a software, the value g can be obtained.
Next, we solve the inverse problem of (
74). We generate the data with error by adding random perturbation, i.e.,
where the function
produces a list of random numbers with a mean of 0 and a variance of 1, and
represents the relative error level. The error level is given by the following equation,
To verify the accuracy of the numerical results, the relative errors are given by the following equations:
In practice, it is difficult to obtain the priori bound
E, and the selection of prior regularization parameters is based on the prior bound condition. Therefore, we only provide numerical results under the posterior regularization parameter selection rules. We let
in (
38) and
in (
64), the initial value
,
,
and the noisy level
.
Here are three numerical examples.
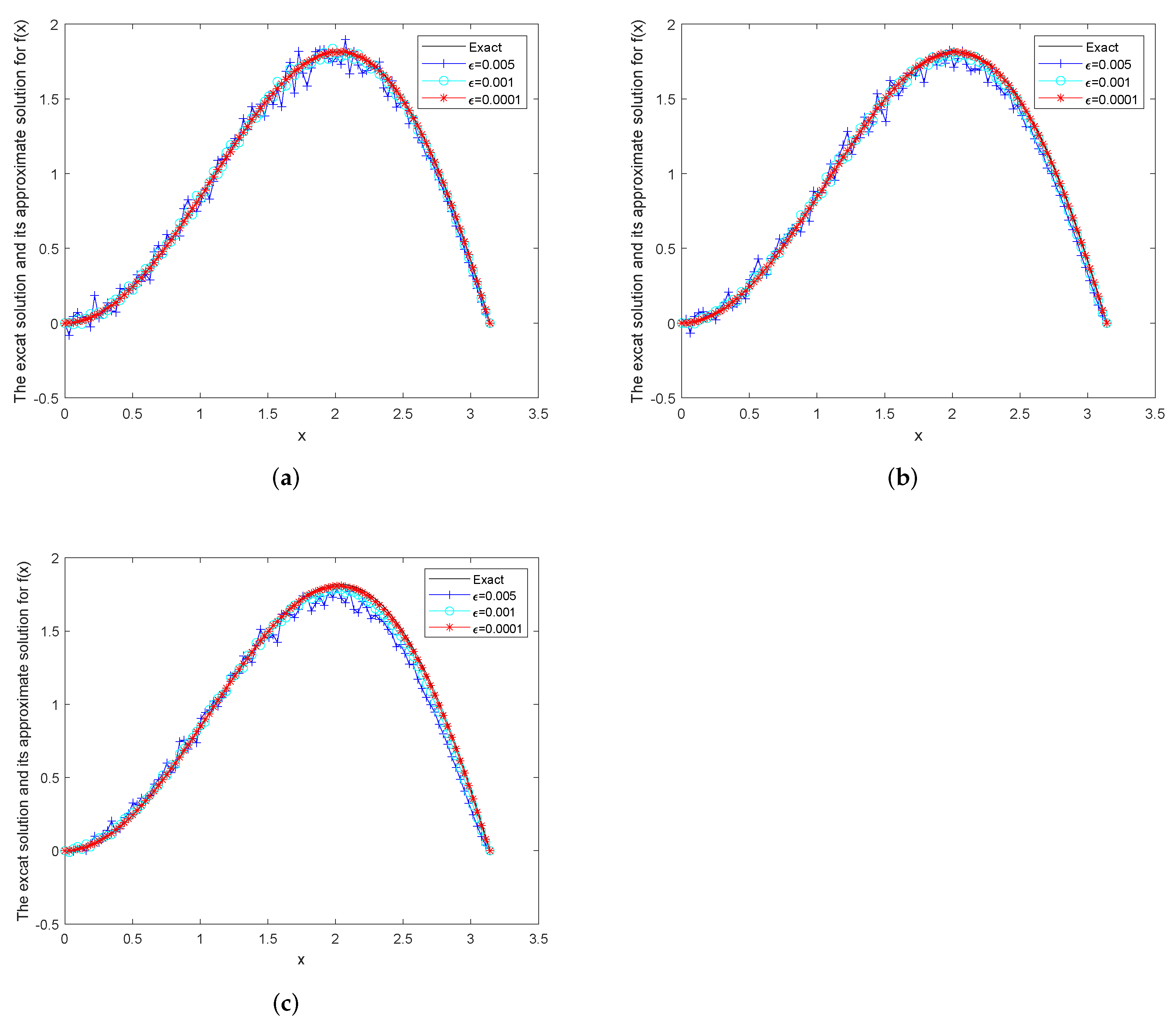
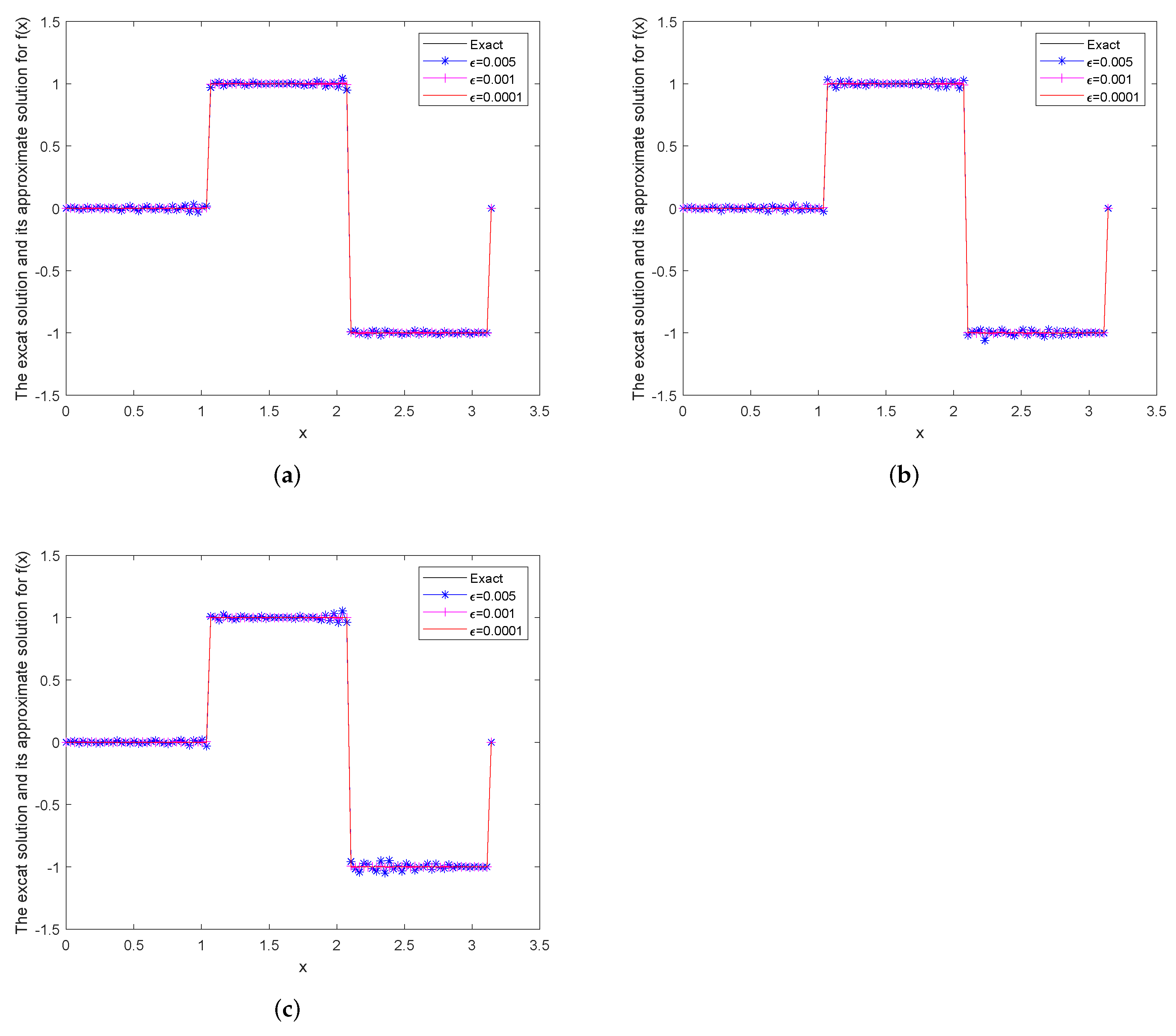
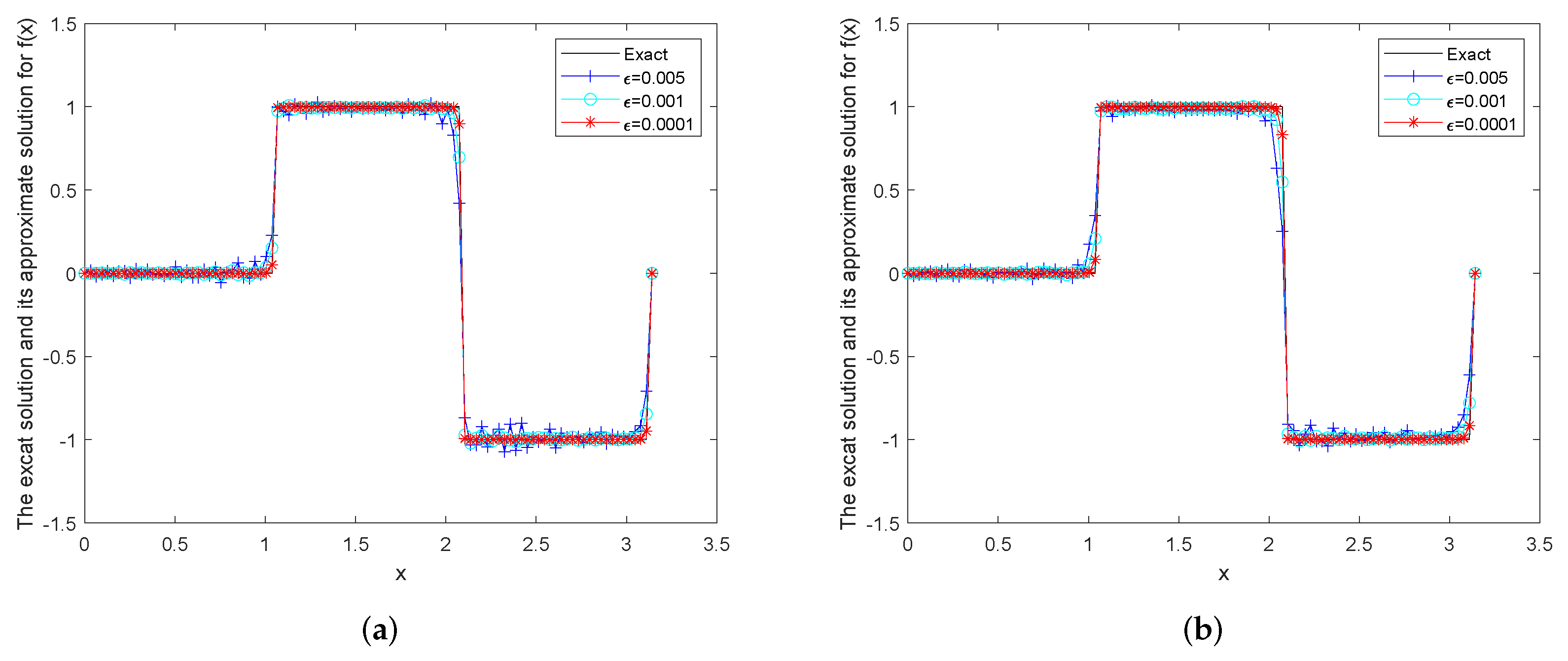
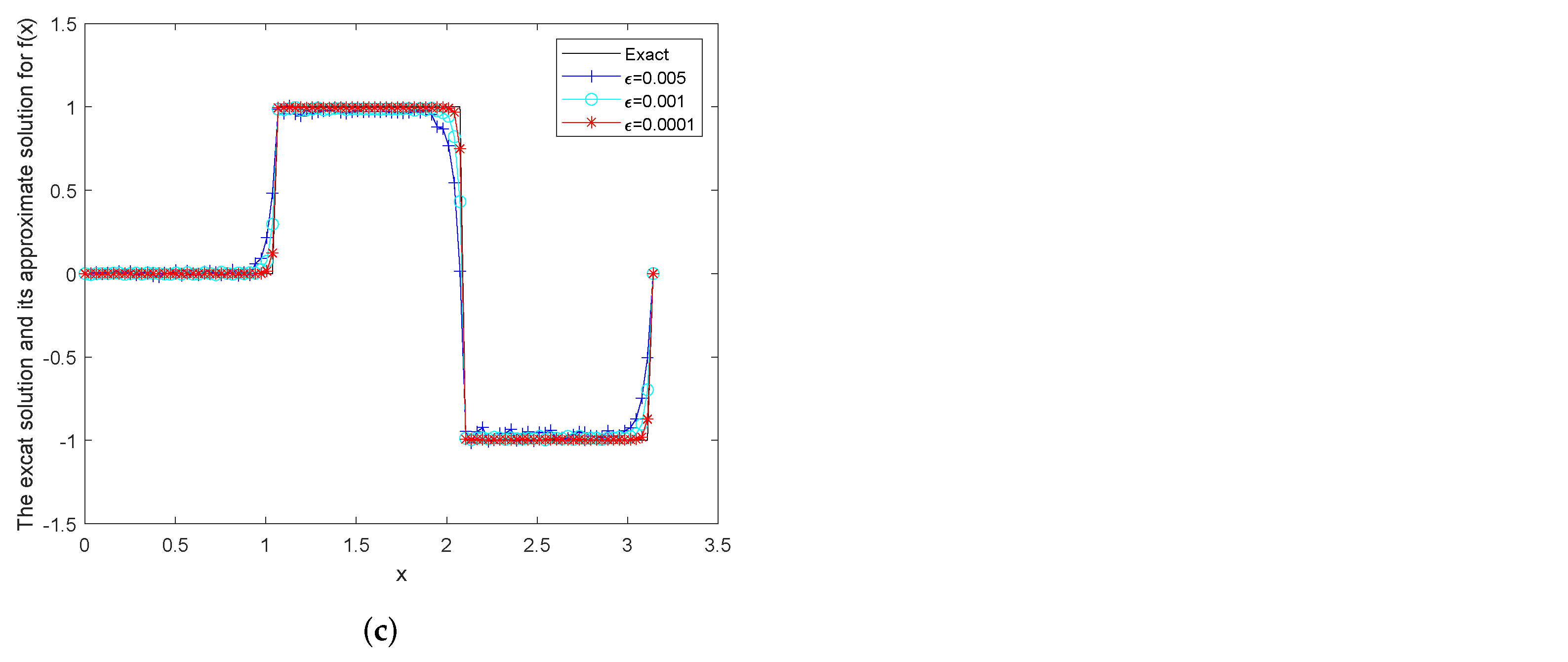
Example 1. Consider the smooth function Example 2. Consider the piecewise smooth function Example 3. Consider the piecewise function Figure 1 shows the exact
and its Tikhonov regularization approximation solution
for Example 1 in the case of
.
Figure 2 shows the exact
and its Quasi-boundary regularization approximation solution
for Example 1 in the case of
. From
Table 1, we find that the smaller
and
, the smaller the relative error between the exact solution and the regularization solution.
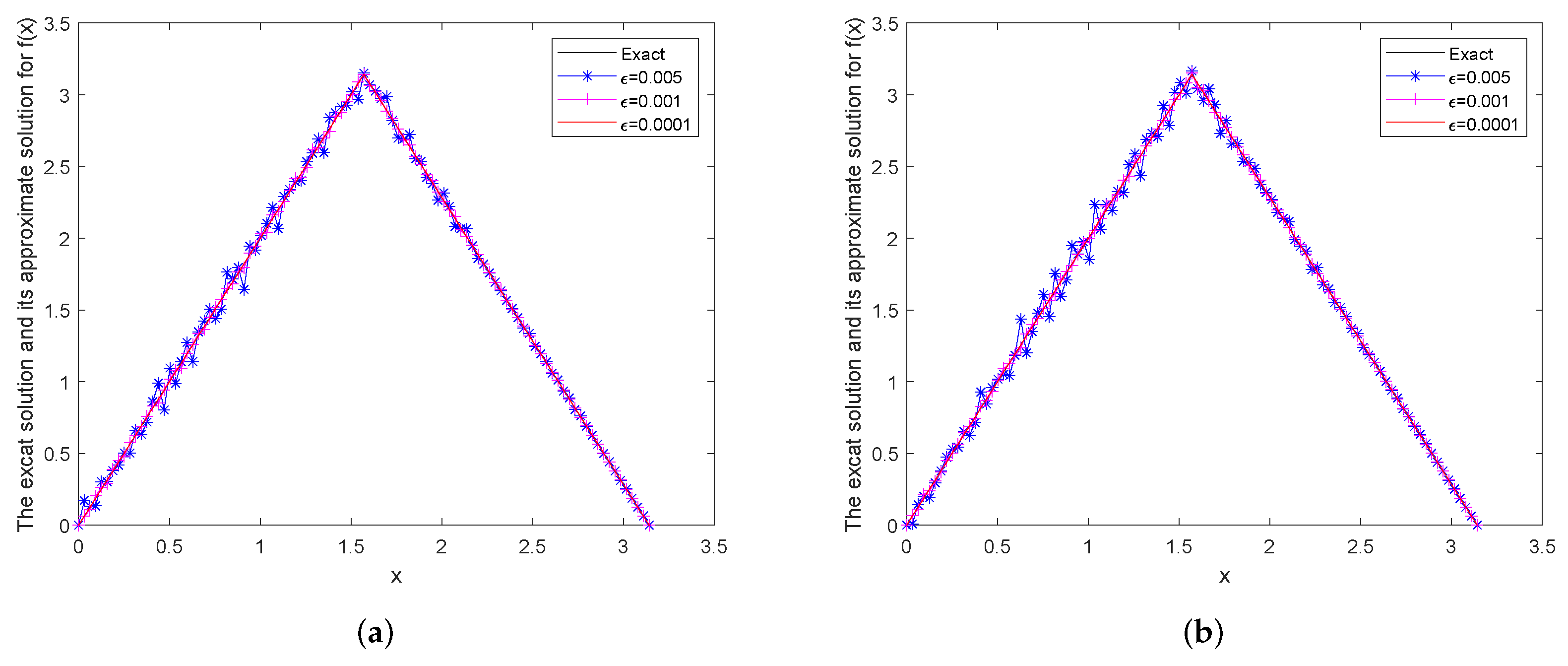
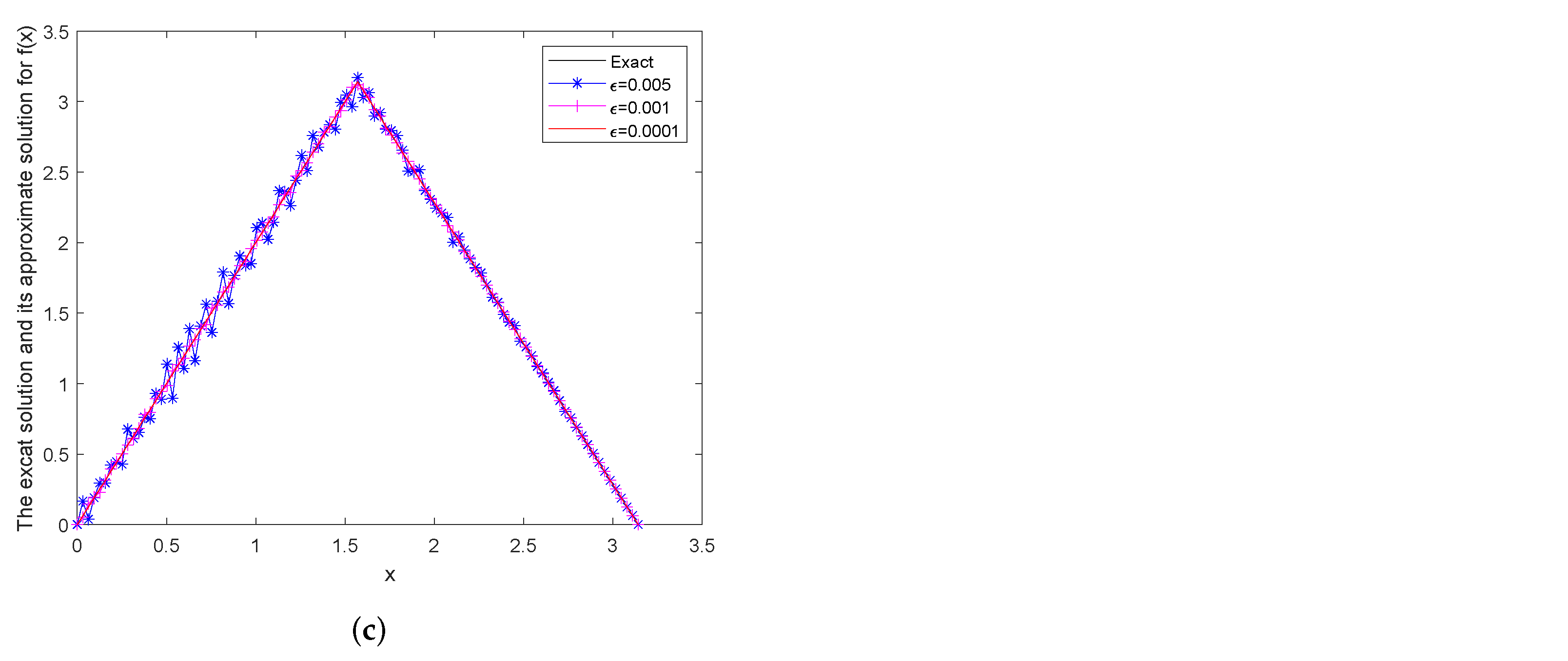
Figure 3 shows the exact
and its Tikhonov regularization approximation solution
for Example 2 in the case of
.
Figure 4 shows the exact
and its Quasi-boundary regularization approximation solution
for Example 2 in the case of
. From
Table 2, we find that the smaller
and
, the smaller the relative error between the exact solution and the regularization solution.
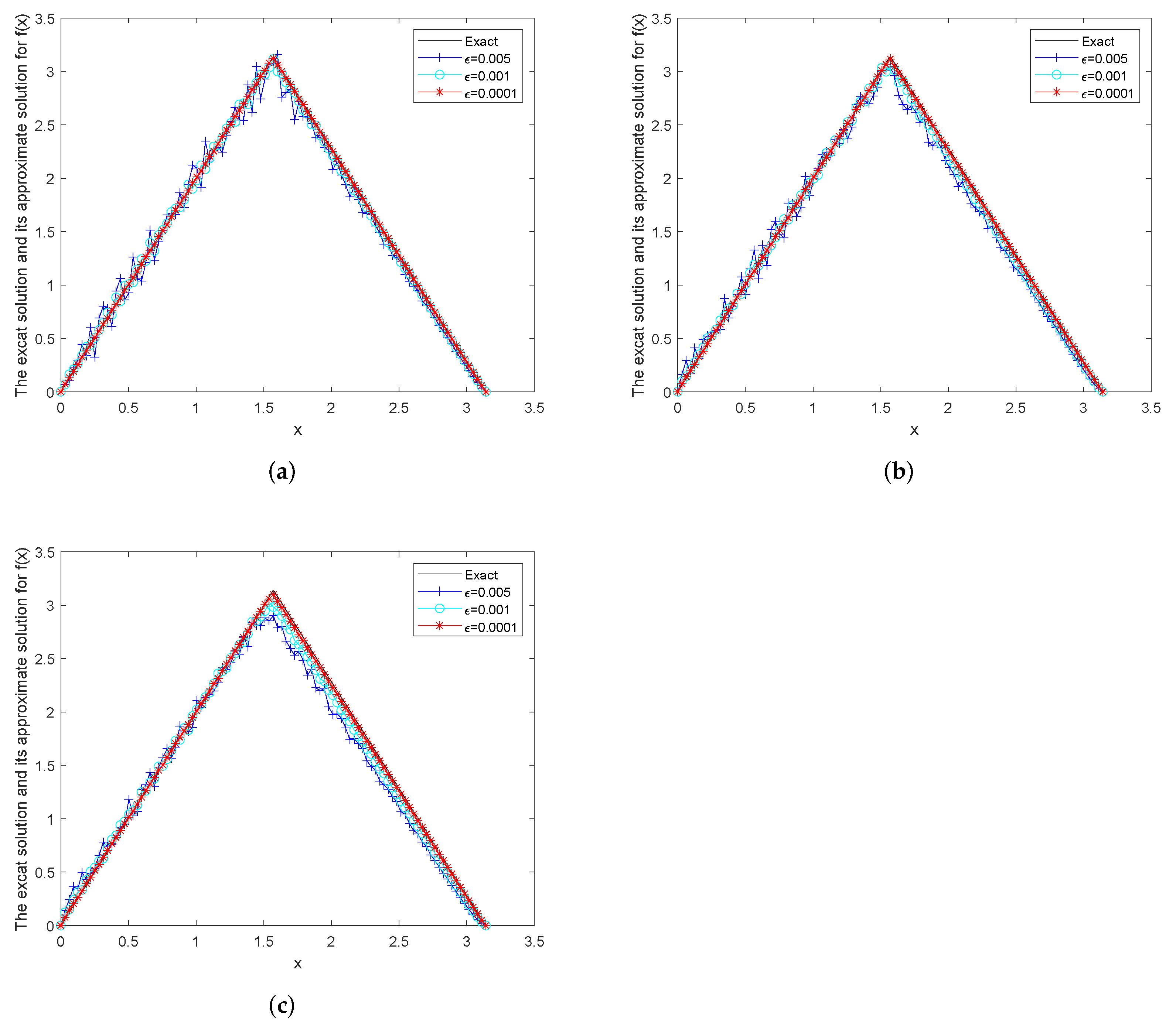
Figure 5 shows the exact
and its Tikhonov regularization approximation solution
for Example 3 in the case of
.
Figure 6 shows the exact
and its Quasi-boundary regularization approximation solution
for Example 3 in the case of
. From
Table 3, we find that the smaller
and
, the smaller the relative error between the exact solution and the the regularization solution.
Through the above examples containing different types of functions, we find that the smaller the and , the better the approximation between the exact solution and the regularization solution. Both the Tikhonov regularization method and the Quasi-boundary regularization method are effective. Moreover, it can be seen that the fitting effect of the Tikhonov regularization method is better than that of the Quasi-boundary regularization method.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}