
A New Algorithm for Variational Inequality Problems in CAT(0) Spaces


{kind=link}
{kind=link}
Abstract
1. Introduction
- . For such a triangle, there is a comparison triangle
- such that:
- .
2. Materials and Methods
- (i)
- (ii)
- .
- (i)
- (ii)
- .
3. -Duality Mapping and Some Crucial Lemmas
- A mapping having the following property is known as sunny ifwhenever .
- A mapping is called the duality mapping with regard to if for any
- A mapping is called the normalized duality mapping (abbreviated as ND-map) with respect to if
- An operator is called accretive ifwhere is the ND-map on .
- For , an operator is called -inverse strongly accretive (abbreviated as -ISA) if
- (a)
- ;
- (b)
- ;
- (c)
- is sunny and nonexpansive.
- (a)
- is a solution of problem
- (b)
- Assume a mapping defined asthen assume the fixed point of ψ is , that is, , where . Assume that are α-ISA and β-ISA operators, respectively. Then ψ is nonexpansive if .
4. Main Results
- (i)
- Assume there exists a strictly increasing, convex, and continuous function ; then,or,
- (ii)
- , .Then sequence converges strongly to , which is also the solution of the variational inequality problem
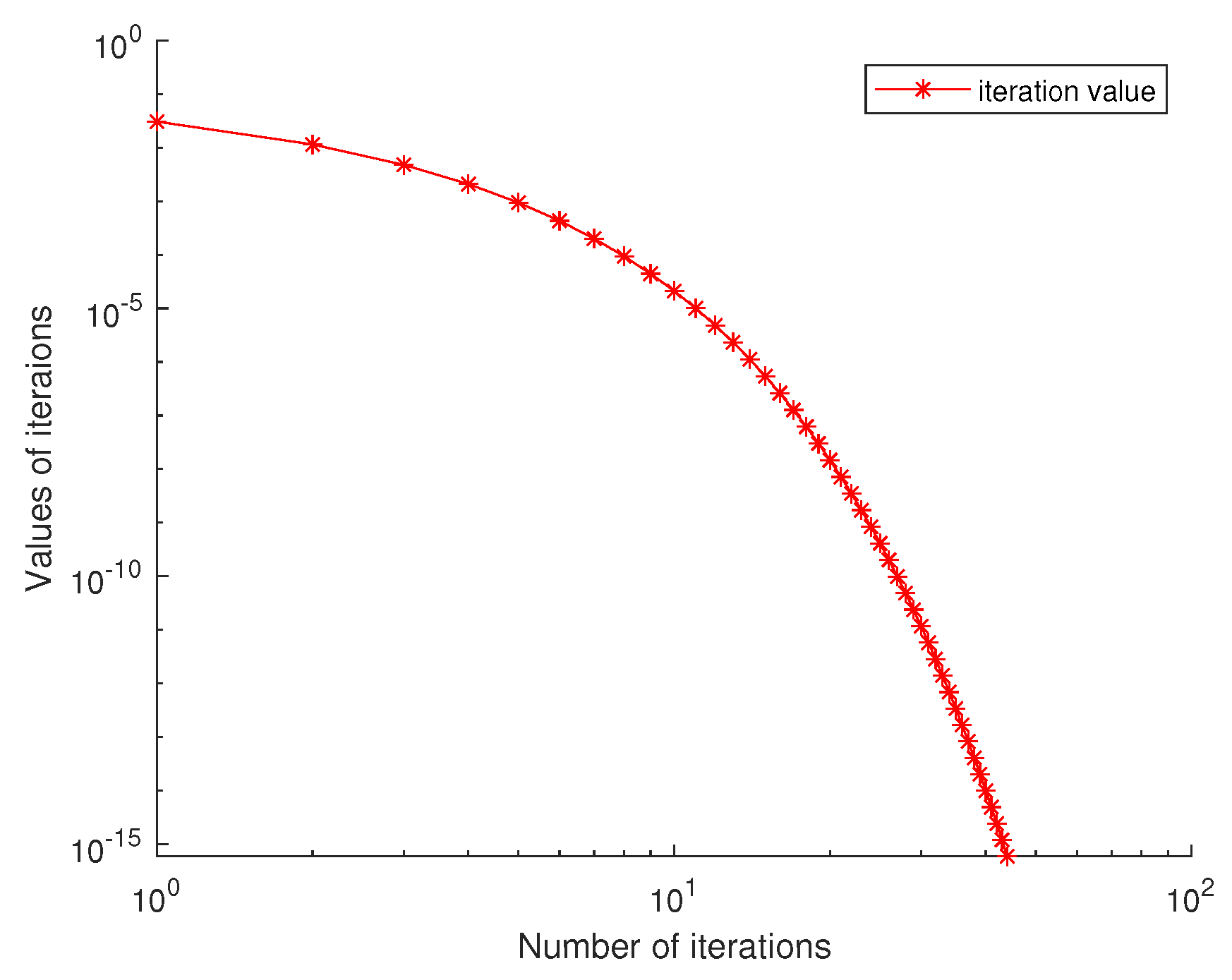
5. Numerical Simulations
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kinderlehrer, D.; Stampacchia, G. An Introduction to Variational Inequalities and Their Applications; Academic Press: New York, NY, USA, 1980. [Google Scholar]
- Hartman, P.; Stampacchia, G. On some non-linear elliptic differential-functional equations. Acta Math. 1969, 115, 153–188. [Google Scholar] [CrossRef]
- Lions, J.L.; Stampacchia, G. Variational inequalities. Commun. Pure Appl. Math. 1967, 20, 493–519. [Google Scholar] [CrossRef]
- Mancino, O.G.; Stampacchia, G. Convex programming and variational inequalities. J. Optim. Theory Appl. 1972, 9, 3–23. [Google Scholar] [CrossRef]
- Stampacchia, G. Forms bilineares coercives sur les ensembles convexes. Comptes Rendus Acad. Sci. 1964, 258, 4413–4416. [Google Scholar]
- Stampacchia, G. Variational inequalities. In theory and applications of monotone operators. In Proceedings of the NATO Advanced Study Institute, Venice, Italy, 1968; Edizioni “Oderisi”; NATO Advanced Study Institute: Gubbio, Italy, 1969; pp. 101–192. [Google Scholar]
- Facchinei, F.; Pang, J.S. Finite-Dimensional Variational Inequalities and Complimentary Problems; Springer Series in Operations Research; Springer: New York, NY, USA, 2003; Volumes I and II. [Google Scholar]
- Konnov, I.V. Combined realtion methods for finding equilbrum points and solving related problems. Russ. Math. 1993, 37, 44–51. [Google Scholar]
- Konnov, I.V. Combined Relaxation Methods for Variatioanl Inequalities; Springer: Berlin/Heidelberg, Germany, 2001. [Google Scholar]
- Moudafi, A. Viscosity approximation methods for fixed-points problems. J. Math. Anal. Appl. 2000, 241, 46–55. [Google Scholar] [CrossRef]
- Wangkeeree, R.; Boonkong, U.; Preechasilp, P. Viscosity approximation methods for asymptotically nonexpansive mapping in CAT (0) spaces. Fixed Point Theory Appl. 2015, 2015, 23. [Google Scholar] [CrossRef]
- Wang, Y.; Pan, C. Viscosity approximation methods for a general variational inequality system and fixed point problems in Banach spaces. Symmetry 2020, 12, 36. [Google Scholar] [CrossRef]
- Xu, H.K. Viscosity approximation methods for nonexpansive mappings. J. Math. Anal. Appl. 2004, 298, 279–291. [Google Scholar] [CrossRef]
- Kim, K.S. Convergence theorems of variational inequality for asymptotically nonexpansive nonself mapping in CAT (0) spaces. Mathematics 2019, 7, 1234. [Google Scholar] [CrossRef]
- Gürsoy, F.; Hacioglu, E.; Karakaya, V.; Milovanović, G.V.; Uddin, I. Variational inequality problem involving multivalued nonexpansive mapping in CAT (0) spaces. Results Math. 2022, 77, 131. [Google Scholar] [CrossRef]
- Tassaddiq, A.; Kalsoom, A.; Batool, A.; Almutairi, D.K.; Afsheen, S. An Algorithm for Solving Pseudomonotone Variational Inequality Problems in CAT (0) Spaces. Contemp. Math. 2024, 5, 590–601. [Google Scholar] [CrossRef]
- Gromov, M. Hyperbolic groups. In Essays in Group Theory; Springer: New York, NY, USA, 1987; pp. 75–263. [Google Scholar]
- Bridson, M.R.; Haefliger, A. Metric Spaces of Non-Positive Curvature; Springer Science and Business Media: Berlin/Heidelberg, Germany, 2013; Volume 319. [Google Scholar]
- Bruhat, F.; Tits, J. Groupes reductifs sur un corps local. Publ. Math. Inst. Hautes Etudes Sci. 1972, 41, 5–251. [Google Scholar] [CrossRef]
- Berg, I.D.; Nikolaev, I.G. Quasilinearization and curvature of Aleksandrov spaces. Geom. Dedicata 2008, 133, 195–218. [Google Scholar] [CrossRef]
- Dhompongsa, S.; Panyanak, B. On ▵-convergence theorems in CAT (0) spaces. Comput. Math. Appl. 2008, 56, 2572–2579. [Google Scholar] [CrossRef]
- Kakavandi, B.A.; Amini, M. Duality and subdifferential for convex functions on complete CAT (0) metric spaces. Nonlinear Anal. Theory Methods Appl. 2010, 73, 3450–3455. [Google Scholar] [CrossRef]
- Chaoha, P.; Phon-On, A. A note on fixed point sets in CAT (0) spaces. J. Math. Anal. Appl. 2006, 320, 983–987. [Google Scholar] [CrossRef]
- Kirk, W.A.; Panyanak, B. A concept of convergence in geodesic spacesmappings. Nonlinear Anal. Theory Methods Appl. 2008, 60, 1345–1355. [Google Scholar]
- Yao, Y.; Noor, M.A.; Noor, K.I.; Liou, Y.C.; Yaqoob, H. Modified extragradient methods for a system of variational inequalities in Banach spaces. Acta Appl. Math. 2010, 110, 1211–1224. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kalsoom, A.; Rashid, M.; Bagdasar, O.; Nisa, Z.U. A New Algorithm for Variational Inequality Problems in CAT(0) Spaces. Mathematics 2024, 12, 2193. https://doi.org/10.3390/math12142193
Kalsoom A, Rashid M, Bagdasar O, Nisa ZU. A New Algorithm for Variational Inequality Problems in CAT(0) Spaces. Mathematics. 2024; 12(14):2193. https://doi.org/10.3390/math12142193
Chicago/Turabian StyleKalsoom, Amna, Maliha Rashid, Ovidiu Bagdasar, and Zaib Un Nisa. 2024. "A New Algorithm for Variational Inequality Problems in CAT(0) Spaces" Mathematics 12, no. 14: 2193. https://doi.org/10.3390/math12142193
APA StyleKalsoom, A., Rashid, M., Bagdasar, O., & Nisa, Z. U. (2024). A New Algorithm for Variational Inequality Problems in CAT(0) Spaces. Mathematics, 12(14), 2193. https://doi.org/10.3390/math12142193