

Designing Decentralized Multi-Variable Robust Controllers: A Multi-Objective Approach Considering Nearly Optimal Solutions



Abstract
1. Introduction
2. Background
2.1. Multi-Objective Optimization Problems
2.2. Considering Uncertainties in MOP
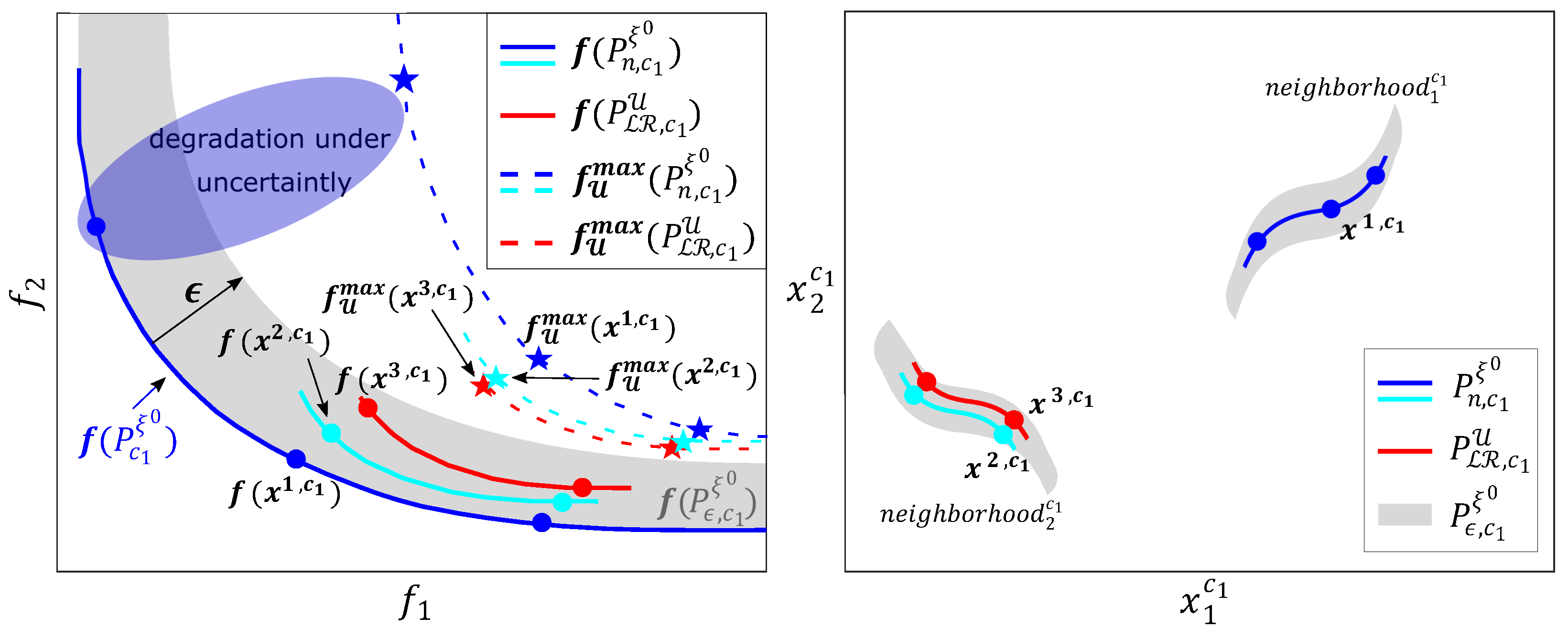
2.3. Advantages of Using Nearly Optimal Solutions in MOP
3. Comparison of Design Concepts in MOP
Obtaining a Lightly Robust Set
4. Methodology Proposed
- Define as the maximum acceptable loss for the design objectives for .
- Define neighborhood as the maximum distance between neighboring controllers for each design concept .
- An MOP is defined for and each design concept (see MOP, as defined on (1)). In the optimization, , the optimal controllers, and the relevant nearly optimal controllers were obtained.
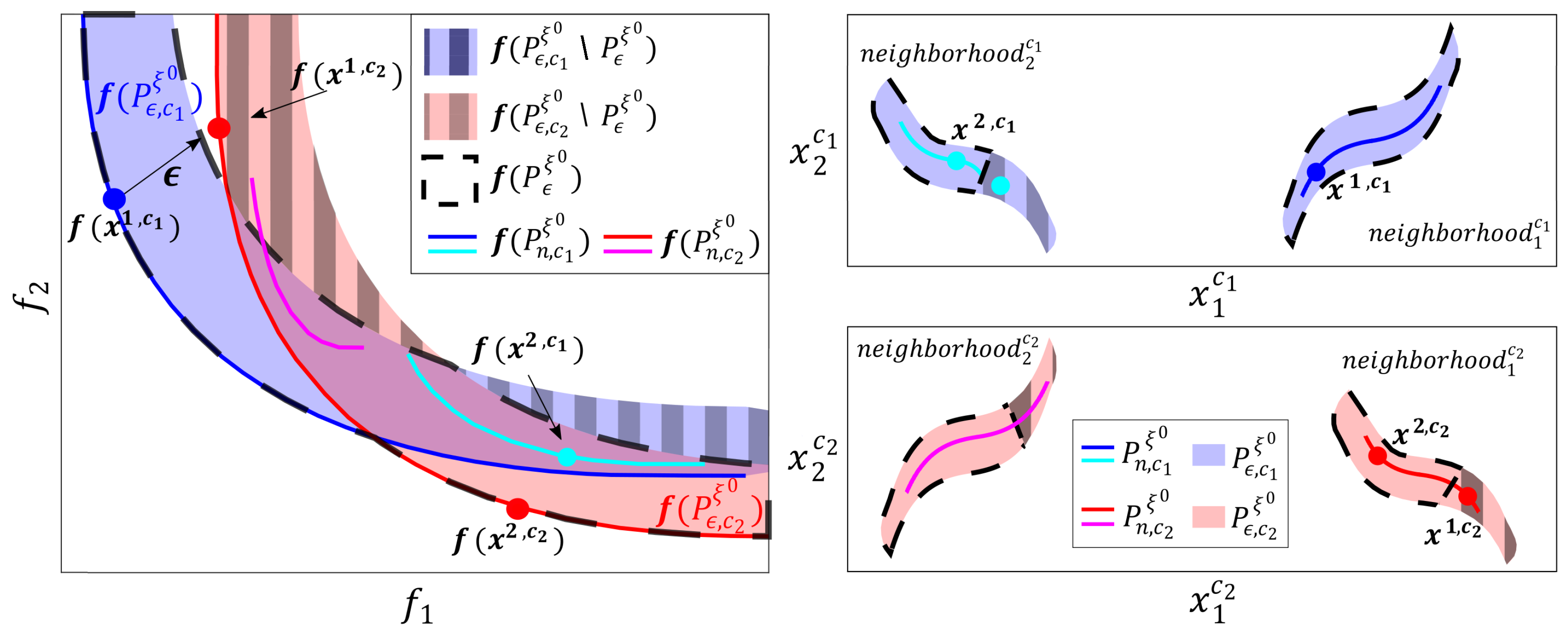
- The Pareto set is defined considering all concepts simultaneously, thus obtaining ().
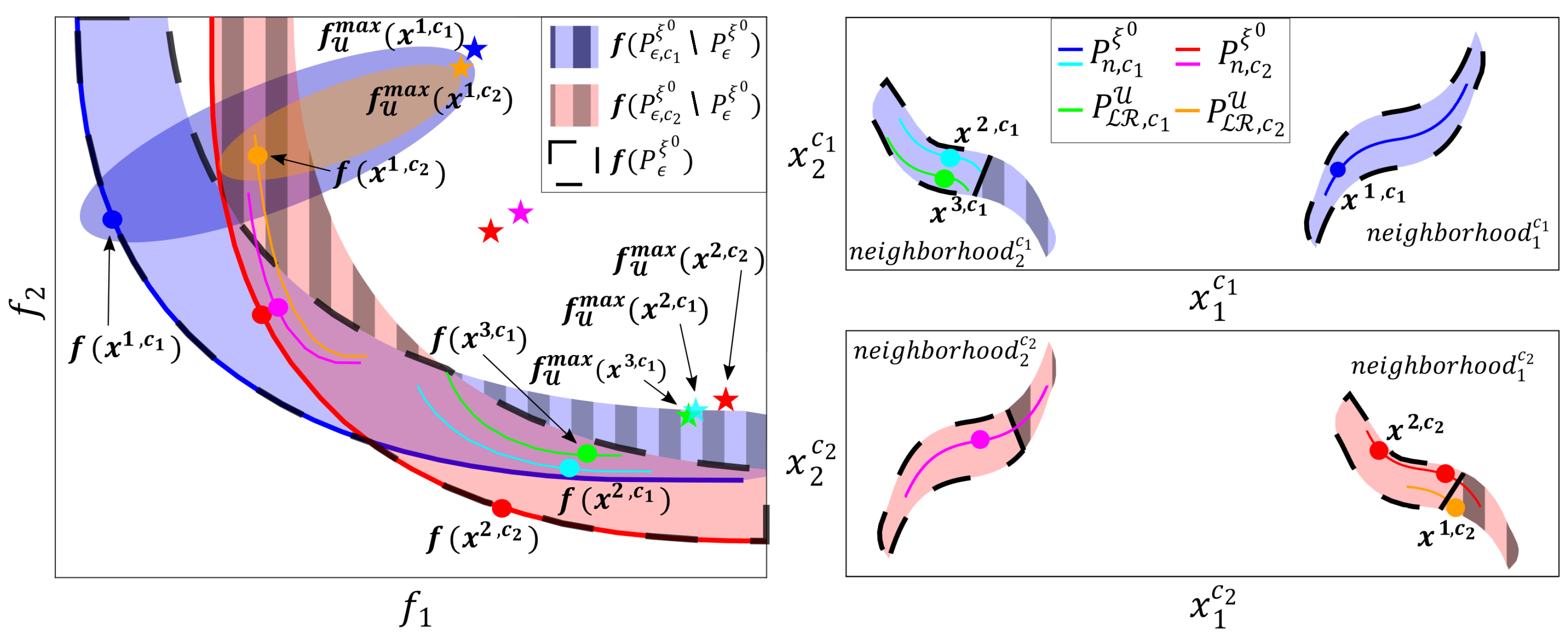
- Finally, is obtained for each solution of set .
5. Example 1: Control of a Linear System with Uncertainties
5.1. Description of the Problem
- Diagonal PI controllers ():
- Off-diagonal PI controllers ():where is the proportional gains, is the integral time in seconds for each design concept and control loop i, and and are the output errors, with and being the set points for each closed loop.
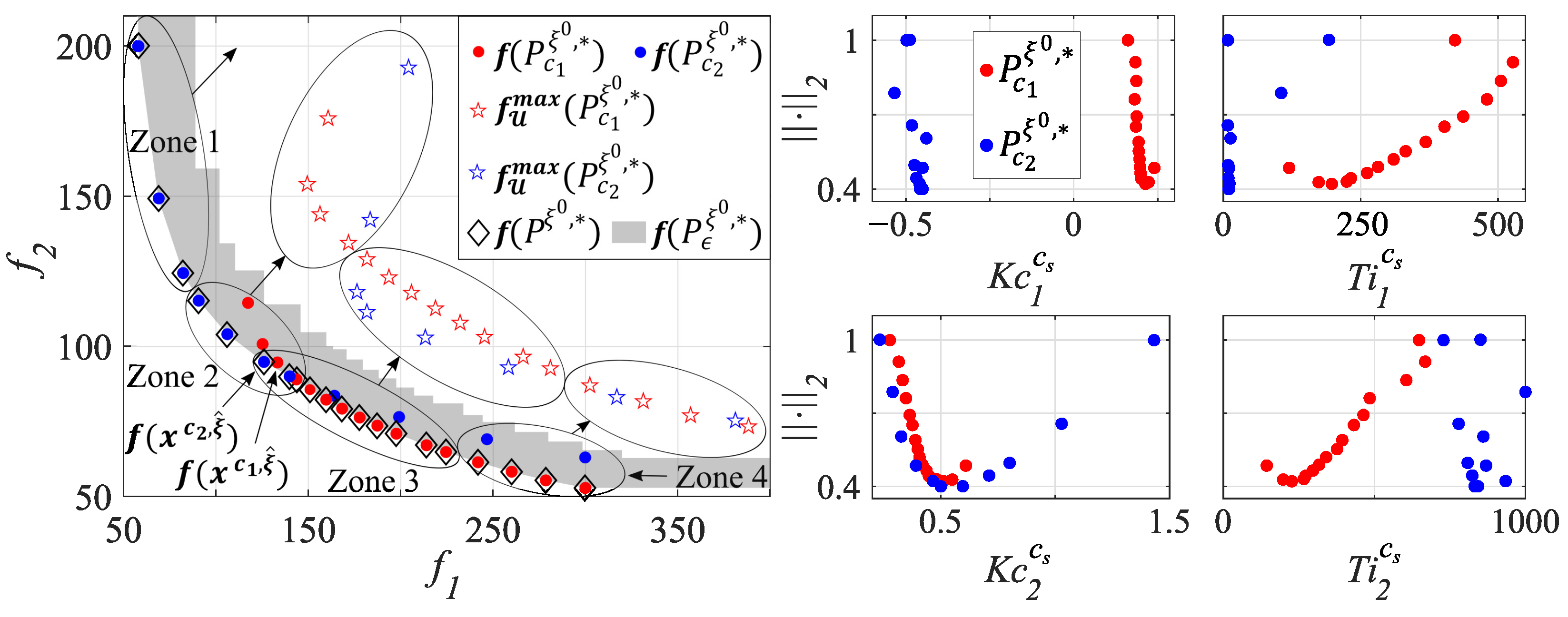
5.2. Results and Discussion
- The off-diagonal concept () is optimal in Zones 1 and 2.
- The diagonal concept () is optimal in Zones 3 and 4.
- The off-diagonal concept (blue stars) was not very robust in Zone 1. In this zone, controllers were obtained with being very degraded and going off the graph’s scale.
- In Zone 2, diagonal concept was significantly more robust.
- In Zone 3, the most robust was the off-diagonal concept .
- Finally, in Zone 4, there was no clear preference between the compared concepts regarding their robustness.
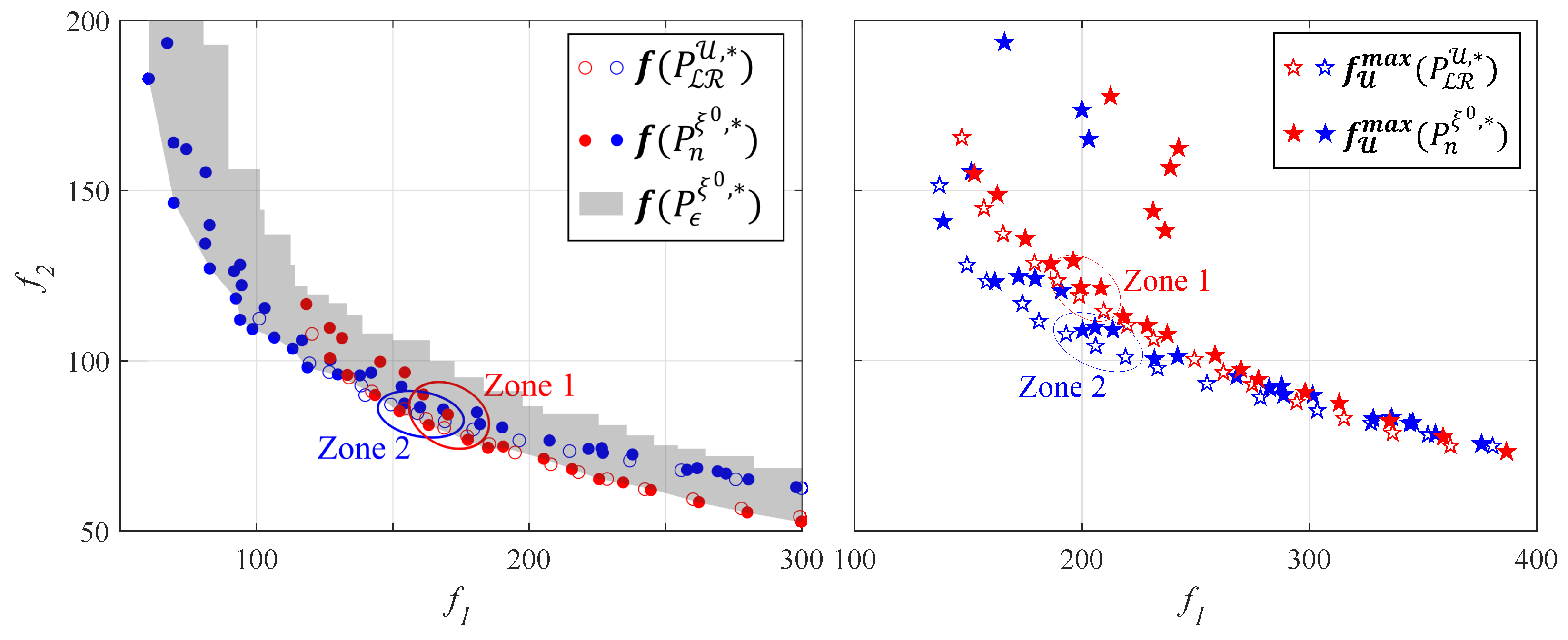
- The designer prefers controllers with a small error in exchange for a worse control effort.
- The designer prefers controllers with low control effort in exchange for more error.
- The off-diagonal concept () is optimal in the range .
- The diagonal concept () is optimal in the range .
- The off-diagonal concept is now more robust for small values (unlike before).
- The off-diagonal concept is more robust in the range .
- The diagonal concept is optimal in the range .
- (new methodology, see Section 4) mathematically guarantees (see Theorem 1) its similarity to the set of robust controllers (see Figure 8), with a notably lower computational cost (see Table 3). In addition, this methodology provides more information, and so enables a more reliable solution to be chosen.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Deb, K. Multi-Objective Optimization Using Evolutionary Algorithms; John Wiley & Sons: Hoboken, NJ, USA, 2001; Volume 16. [Google Scholar]
- Miettinen, K. Nonlinear Multiobjective Optimization; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012; Volume 12. [Google Scholar]
- Gunantara, N. A review of multi-objective optimization: Methods and its applications. Cogent Eng. 2018, 5, 1502242. [Google Scholar] [CrossRef]
- Weinmann, A. Uncertain Models and Robust Control; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Xu, J.; Du, Y.; Chen, Y.H.; Guo, H. Optimal robust control design for constrained uncertain systems: A fuzzy-set theoretic approach. IEEE Trans. Fuzzy Syst. 2018, 26, 3494–3505. [Google Scholar] [CrossRef]
- Schöbel, A. Generalized light robustness and the trade-off between robustness and nominal quality. Math. Methods Oper. Res. 2014, 80, 161–191. [Google Scholar] [CrossRef]
- Laughlin, D.L.; Jordan, K.G.; Morari, M. Internal model control and process uncertainty: Mapping uncertainty regions for SISO controller design. Int. J. Control 1986, 44, 1675–1698. [Google Scholar] [CrossRef]
- Parnianifard, A.; Azfanizam, A.S. Metamodel-based robust simulation-optimization assisted optimal design of multiloop integer and fractional-order PID controller. Int. J. Numer. Model. Electron. Netw. Devices Fields 2020, 33, e2679. [Google Scholar] [CrossRef]
- Crespo, L.G.; Kenny, S.P. Robust Control Design for Systems with Probabilistic Uncertainty; Technical Report; NASA: Washington, DC, USA, 2005. [Google Scholar]
- Fischetti, M.; Monaci, M. Light robustness. In Robust and Online Large-Scale Optimization; Springer: Berlin/Heidelberg, Germany, 2009; pp. 61–84. [Google Scholar]
- Hernández Castellanos, C.I.; Schütze, O.; Sun, J.Q.; Ober-Blöbaum, S. Non-Epsilon Dominated Evolutionary Algorithm for the Set of Approximate Solutions. Math. Comput. Appl. 2020, 25, 3. [Google Scholar] [CrossRef]
- Ide, J.; Schöbel, A. Robustness for uncertain multi-objective optimization: A survey and analysis of different concepts. OR Spectr. 2016, 38, 235–271. [Google Scholar] [CrossRef]
- Soyster, A.L. Convex programming with set-inclusive constraints and applications to inexact linear programming. Oper. Res. 1973, 21, 1154–1157. [Google Scholar] [CrossRef]
- Ben-Tal, A.; El Ghaoui, L.; Nemirovski, A. Robust Optimization; Princeton University Press: Princeton, NJ, USA, 2009; Volume 28. [Google Scholar]
- Kuroiwa, D.; Lee, G.M. On robust multiobjective optimization. Vietnam J. Math 2012, 40, 305–317. [Google Scholar]
- Parnianifard, A.; Fakhfakh, M.; Kotti, M.; Zemouche, A.; Wuttisittikulkij, L. Robust tuning and sensitivity analysis of stochastic integer and fractional-order PID control systems: Application of surrogate-based robust simulation-optimization. Int. J. Numer. Model. Electron. Netw. Devices Fields 2021, 34, e2835. [Google Scholar] [CrossRef]
- Bertsimas, D.; Sim, M. The price of robustness. Oper. Res. 2004, 52, 35–53. [Google Scholar] [CrossRef]
- Ben-Tal, A.; Nemirovski, A. Robust solutions of linear programming problems contaminated with uncertain data. Math. Program. 2000, 88, 411–424. [Google Scholar] [CrossRef]
- Ben-Tal, A.; Goryashko, A.; Guslitzer, E.; Nemirovski, A. Adjustable robust solutions of uncertain linear programs. Math. Program. 2004, 99, 351–376. [Google Scholar] [CrossRef]
- Erera, A.L.; Morales, J.C.; Savelsbergh, M. Robust optimization for empty repositioning problems. Oper. Res. 2009, 57, 468–483. [Google Scholar] [CrossRef]
- Liebchen, C.; Lübbecke, M.; Möhring, R.; Stiller, S. The concept of recoverable robustness, linear programming recovery, and railway applications. In Robust and Online Large-Scale Optimization: Models and Techniques for Transportation Systems; Springer: Berlin/Heidelberg, Germany, 2009; pp. 1–27. [Google Scholar]
- Stiller, S. Extending Concepts of Reliability-Network Creation Games, Real-Time Scheduling, and Robust Optimization. Ph.D. Thesis, Technical University Berlin, Berlin, Germany, 2009. [Google Scholar]
- Goerigk, M.; Schmidt, M.; Schöbel, A.; Knoth, M.; Müller-Hannemann, M. The price of strict and light robustness in timetable information. Transp. Sci. 2014, 48, 225–242. [Google Scholar] [CrossRef]
- Goerigk, M.; Schöbel, A. An empirical analysis of robustness concepts for timetabling. In Proceedings of the 10th Workshop on Algorithmic Approaches for Transportation Modelling, Optimization, and Systems (ATMOS’10), Liverpool, UK, 6–10 September 2010. [Google Scholar]
- He, Y.; Li, Z.; Zhang, J.; Shi, G.; Cao, W. Day-ahead and intraday multi-time scale microgrid scheduling based on light robustness and MPC. Int. J. Electr. Power Energy Syst. 2023, 144, 108546. [Google Scholar] [CrossRef]
- Schöbel, A.; Zhou-Kangas, Y. The price of multiobjective robustness: Analyzing solution sets to uncertain multiobjective problems. Eur. J. Oper. Res. 2021, 291, 782–793. [Google Scholar] [CrossRef]
- Klamroth, K.; Köbis, E.; Schöbel, A.; Tammer, C. A unified approach for different concepts of robustness and stochastic programming via non-linear scalarizing functionals. Optimization 2013, 62, 649–671. [Google Scholar] [CrossRef]
- Pajares, A.; Blasco, X.; Herrero, J.M.; Veyna, U. Advantages of using relevant nearly optimal solutions in multi-objective tuning of robust controllers. ISA Trans. 2023, 139, 143–155. [Google Scholar] [CrossRef]
- Pajares, A.; Blasco, X.; Herrero, J.M.; Reynoso-Meza, G. A multiobjective genetic algorithm for the localization of optimal and nearly optimal solutions which are potentially useful: NevMOGA. Complexity 2018, 2018, 1792420. [Google Scholar] [CrossRef]
- Herrero, J.; Reynoso-Meza, G.; Ramos, C.; Blasco, X. Considerations on loop pairing in MIMO processes. A multi-criteria analysis. IFAC-PapersOnLine 2017, 50, 4454–4459. [Google Scholar] [CrossRef]
- Pareto, V.; Schwier, A.S.; Page, A.N. Manual of Political Economy; Macmillan: New York, NY, USA, 1971. [Google Scholar]
- Schütze, O.; Coello, C.A.C.; Talbi, E.G. Approximating the ε-efficient set of an MOP with stochastic search algorithms. In Proceedings of the Mexican International Conference on Artificial Intelligence, Aguascalientes, Mexico, 4–10 November 2007; Springer: Berlin/Heidelberg, Germany, 2007; pp. 128–138. [Google Scholar]
- Schütze, O.; Vasile, M.; Coello, C.A.C. Computing the set of epsilon-efficient solutions in multiobjective space mission design. J. Aerosp. Comput. Inf. Commun. 2011, 8, 53–70. [Google Scholar] [CrossRef]
- Ehrgott, M.; Ide, J.; Schöbel, A. Minmax robustness for multi-objective optimization problems. Eur. J. Oper. Res. 2014, 239, 17–31. [Google Scholar] [CrossRef]
- Martínez-Iranzo, M.; Herrero, J.M.; Sanchis, J.; Blasco, X.; García-Nieto, S. Applied Pareto multi-objective optimization by stochastic solvers. Eng. Appl. Artif. Intell. 2009, 22, 455–465. [Google Scholar] [CrossRef]
- Mc Avoy, T.; Arkun, Y.; Chen, R.; Robinson, D.; Schnelle, P.D. A new approach to defining a dynamic relative gain. Control Eng. Pract. 2003, 11, 907–914. [Google Scholar] [CrossRef]
- Cai, L.J.; Erlich, I.; Fortmann, J. Dynamic voltage stability analysis for power systems with wind power plants using relative gain array (RGA). IFAC Proc. Vol. 2012, 45, 331–336. [Google Scholar] [CrossRef]
- Blasco, X.; Herrero, J.M.; Reynoso-Meza, G.; Iranzo, M.A.M. Interactive tool for analyzing multiobjective optimization results with level diagrams. In Proceedings of the Genetic and Evolutionary Computation Conference Companion, Berlin, Germany, 15–19 July 2017; pp. 1689–1696. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Controller | f | ||||
|---|---|---|---|---|---|
| 0.21 | 197.4 | 0.51 | 226.5 | [133.3 94.7] | |
| 0.41 | 197.4 | 0.51 | 226.5 | [142.7 113.8] | |
| 0.21 | 447.4 | 0.51 | 226.5 | [169.1 82.8] | |
| 0.21 | 197.4 | 0.71 | 226.5 | [128.5 107.3] | |
| 0.21 | 197.4 | 0.51 | 876.5 | [171.8 82.7] | |
| Controller | |||||
| −0.45 | 9.6 | 0.5 | 842.8 | [126.0 94.7] | |
| −0.25 | 9.6 | 0.5 | 842.8 | [129.5 94.7] | |
| −0.45 | 259.6 | 0.5 | 842.8 | [147.8 91.5] | |
| −0.45 | 9.6 | 0.7 | 842.8 | [92.4 113.8] | |
| −0.45 | 9.6 | 0.5 | 192.8 | [139.4 171.9] |
| Zone | Set | f | ||||||
|---|---|---|---|---|---|---|---|---|
| 1 | 0.19 | 304.9 | 0.48 | 238.5 | [162.2 83.0] | [189.3 123.5] | ||
| 1 | 0.18 | 309.5 | 0.47 | 266.6 | [168.8 80.3] | [198.9 119.1] | ||
| 1 | 0.18 | 348.5 | 0.46 | 290.8 | [177.2 77.8] | [209.6 114.5] | ||
| 1 | 0.18 | 230.0 | 0.43 | 333.7 | [163.1 81.1] | [199.5 121.5] | ||
| 1 | 0.29 | 519.6 | 0.64 | 572.7 | [170.2 84.2] | [196.2 129.3] | ||
| 1 | 0.28 | 576.0 | 0.57 | 494.7 | [161.2 90.1] | [208.4 121.4] | ||
| Zone | Set | |||||||
| 2 | −0.42 | 11.8 | 0.44 | 959.1 | [149.3 87.2] | [193.1 107.8] | ||
| 2 | −0.42 | 12.3 | 0.42 | 966.4 | [159.0 84.6] | [206.0 104.3] | ||
| 2 | −0.42 | 13.85 | 0.40 | 977.0 | [169.1 82.2] | [219.1 101.0] | ||
| 2 | −0.29 | 15.2 | 0.40 | 734.1 | [154.2 87.4] | [200.2 108.9] | ||
| 2 | −0.55 | 525.0 | 0.44 | 883.7 | [168.5 85.7] | [213.6 109.1] | ||
| 2 | −0.62 | 255.5 | 0.41 | 755.8 | [159.9 86.4] | [205.8 109.8] |
| Set | Computational Cost | |||
|---|---|---|---|---|
| Before Optim. | Optim. Stage | Decision Stage | Total Cost | |
| 428 min | 17,333 min | - | 17,761 min | |
| - | 454 min | 167 min | 621 min | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pajares, A.; Blasco, X.; Herrero, J.M.; Sanchis, J.; Simarro, R. Designing Decentralized Multi-Variable Robust Controllers: A Multi-Objective Approach Considering Nearly Optimal Solutions. Mathematics 2024, 12, 2124. https://doi.org/10.3390/math12132124
Pajares A, Blasco X, Herrero JM, Sanchis J, Simarro R. Designing Decentralized Multi-Variable Robust Controllers: A Multi-Objective Approach Considering Nearly Optimal Solutions. Mathematics. 2024; 12(13):2124. https://doi.org/10.3390/math12132124
Chicago/Turabian StylePajares, Alberto, Xavier Blasco, Juan Manuel Herrero, Javier Sanchis, and Raúl Simarro. 2024. "Designing Decentralized Multi-Variable Robust Controllers: A Multi-Objective Approach Considering Nearly Optimal Solutions" Mathematics 12, no. 13: 2124. https://doi.org/10.3390/math12132124
APA StylePajares, A., Blasco, X., Herrero, J. M., Sanchis, J., & Simarro, R. (2024). Designing Decentralized Multi-Variable Robust Controllers: A Multi-Objective Approach Considering Nearly Optimal Solutions. Mathematics, 12(13), 2124. https://doi.org/10.3390/math12132124