
Dynamics of Hepatitis B Virus Transmission with a Lévy Process and Vaccination Effects



Abstract
1. Introduction
2. Model Formulation
3. Preliminaries
4. Model Analysis
Existence and Uniqueness of the Model Solution
5. The HBV Extinction
6. Persistence
Remarks
7. Numerical Model Analysis
7.1. Milstein Scheme for the Model with Jumps
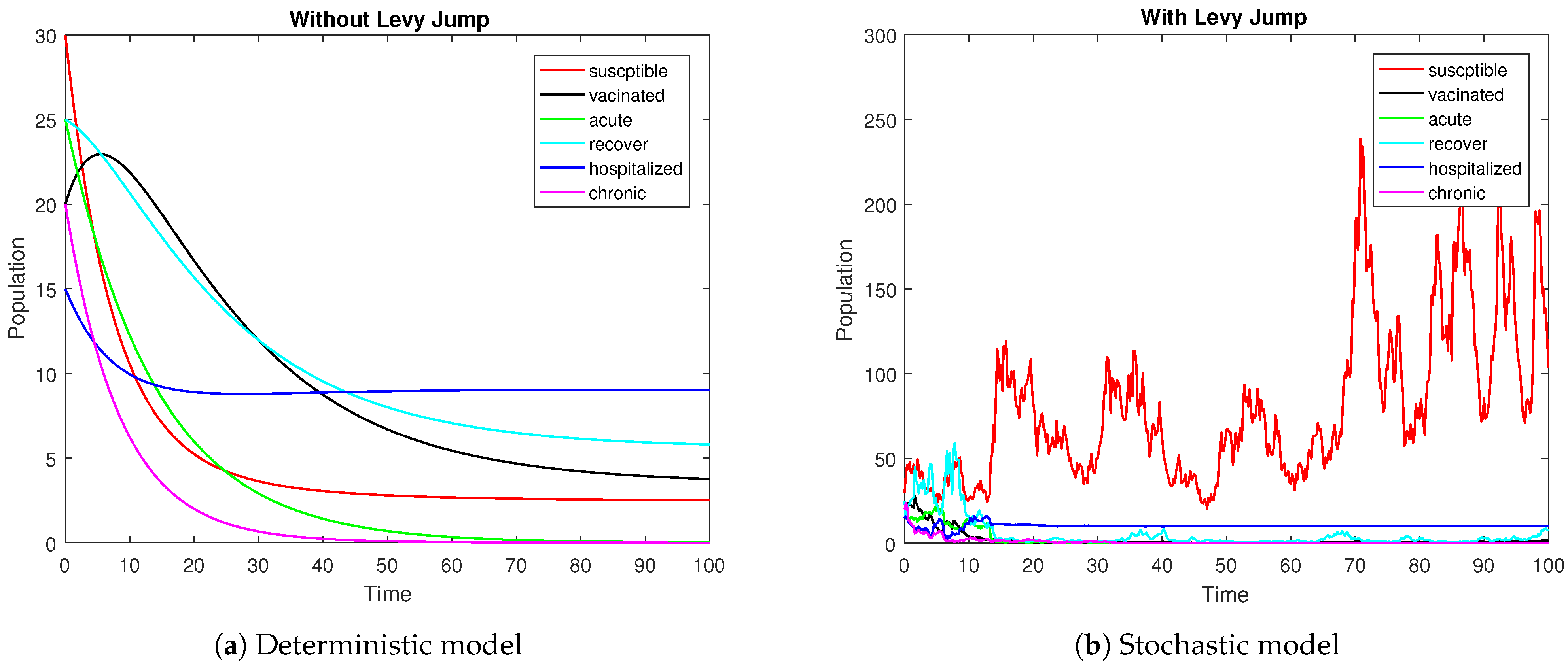
7.2. Extinction-Based Simulation
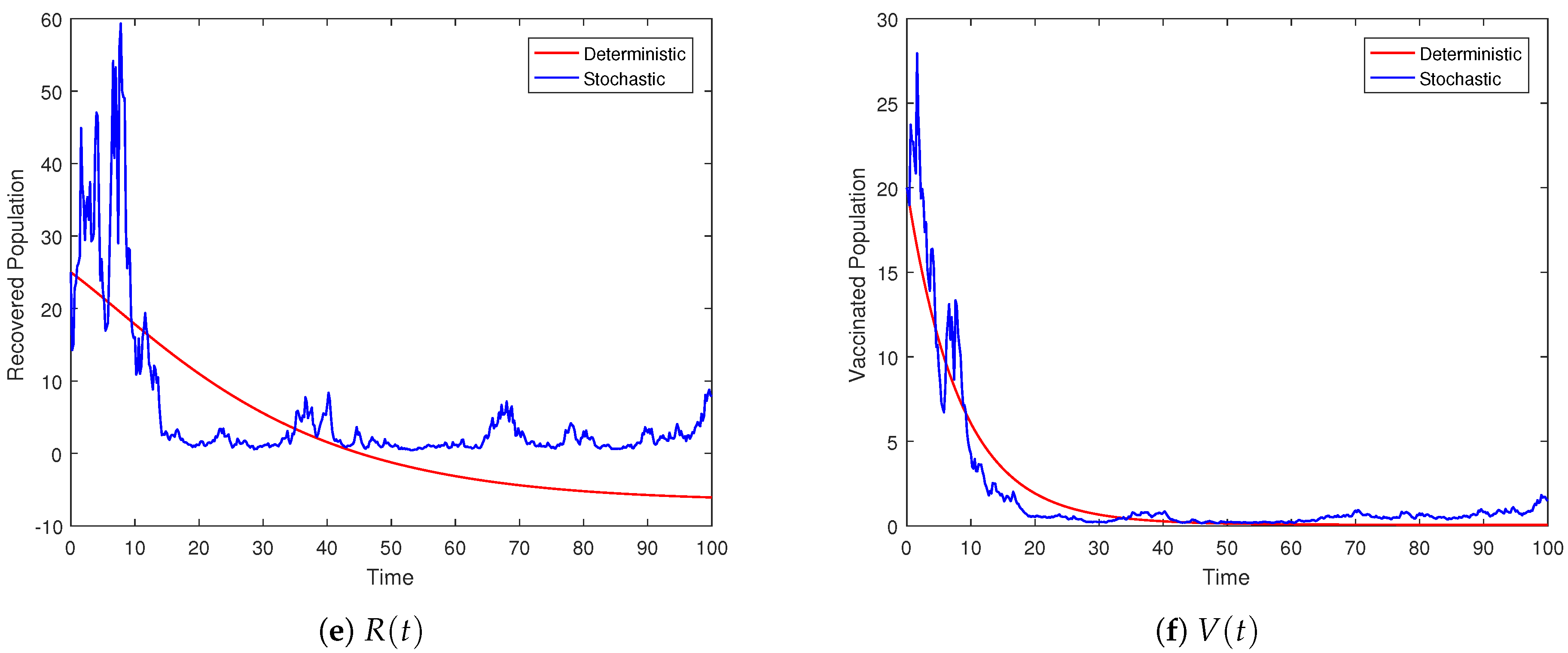
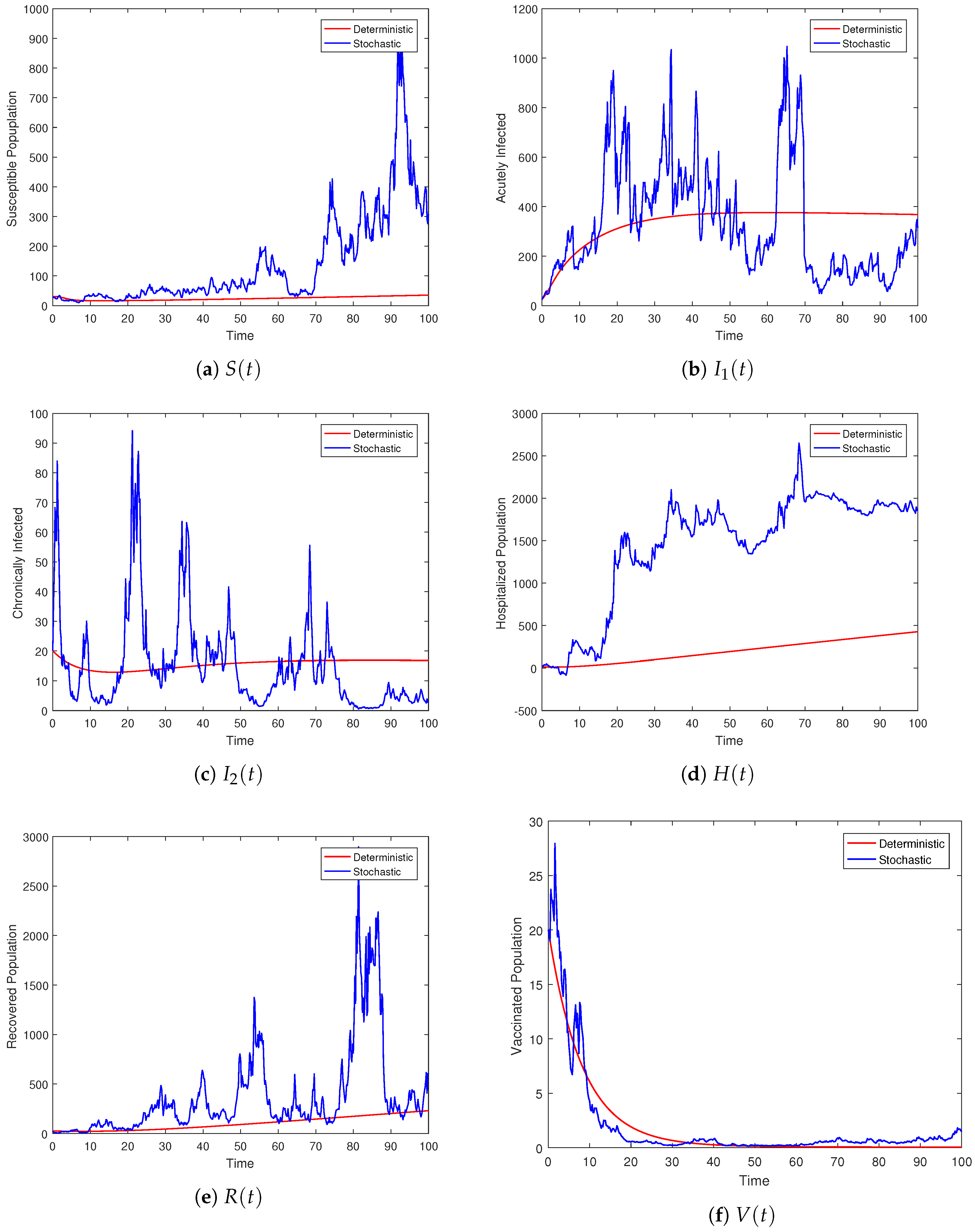
7.3. Simulation Based on Persistence of HBV
7.4. The Impact of Noise on the Stochastic System (3)
7.5. Vaccination Impact on the Stochastic System (3)
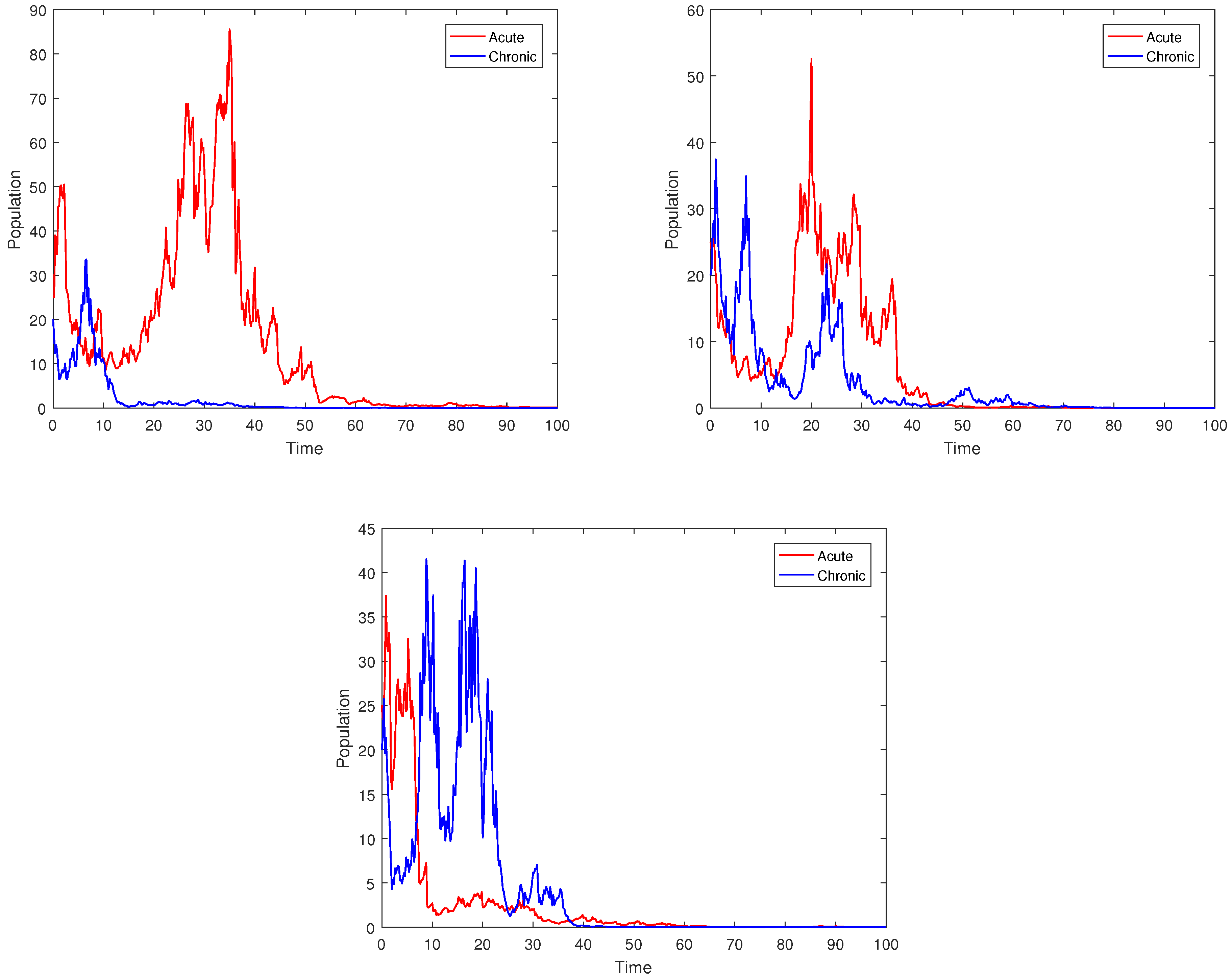
7.6. The Impact of on Stochastic System (3)
8. Conclusions
9. Proof of Theorem 2
10. Proof of Theorem 3
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Din, A.; Li, Y.; Khan, T.; Zaman, G. Mathematical analysis of spread and control of the novel corona virus (COVID-19) in China. Chaos Solitons Fractals 2020, 141, 110286. [Google Scholar] [CrossRef] [PubMed]
- Guo, B.; Khan, A.; Din, A. Numerical simulation of nonlinear stochastic analysis for measles transmission: A case study of a measles epidemic in Pakistan. Fractal Fract. 2023, 7, 130. [Google Scholar] [CrossRef]
- Li, X.Z.; Wang, J.; Ghosh, M. Stability and bifurcation of an SIVS epidemic model with treatment and age of vaccination. Appl. Math Model 2010, 34, 437–450. [Google Scholar] [CrossRef]
- Poland, G.; Jacobson, R. Prevention of hepatitis B with the hepatitis B vaccine. N. Engl. J. Med. 2001, 351, 2832–2838. [Google Scholar] [CrossRef] [PubMed]
- McAleer, W.J.; Buynak, E.B.; Maigeter, R.Z.; Wampler, D.E.; Miller, W.; Hilleman, R. Human hepatitis B vaccine from recombinant yeast. Nature 1984, 307, 178–180. [Google Scholar] [CrossRef] [PubMed]
- La Cognata, A.; Valenti, D.; Dubkov, A.A.; Spagnolo, B. Dynamics of two competing species in the presence of Lévy noise sources. Phys. Rev. E 2010, 82, 011121. [Google Scholar] [CrossRef] [PubMed]
- Lisowski, B.; Valenti, D.; Spagnolo, B.; Bier, M.; Gudowska-Nowak, E. Stepping molecular motor amid Lévy white noise. Phys. Rev. E 2015, 91, 042713. [Google Scholar] [CrossRef]
- Denaro, G.; Valenti, D.; La Cognata, A.; Spagnolo, B.; Bonanno, A.; Basilone, G.; Mazzola, S.; Zgozi, S.W.; Aronica, S.; Brunet, C. Spatio-temporal behaviour of the deep chlorophyll maximum in mediterranean sea: Development of a stochastic model for picophytoplankton dynamics. Ecol. Complex 2013, 13, 21–34. [Google Scholar] [CrossRef]
- Giuffrida, A.; Valenti, D.; Ziino, G.; Spagnolo, B.; Panebianco, A. A stochastic interspecific competition model to predict the behaviour of listeria monocytogenes in the fermentation process of a traditional siciliansalami. Eur. Food Res. Technol. 2009, 228, 767–775. [Google Scholar] [CrossRef]
- Carollo, A.; Spagnolo, B.; Valenti, D. Uhlmann curvature in dissipative phase transitions. Sci. Rep. 2018, 8, 9852. [Google Scholar] [CrossRef]
- Spagnolo, B.; Cirone, M.; La Barbera, A.; de Pasquale, F. Noise-induced effects in population dynamics. J. Phys. 2002, 14, 2247. [Google Scholar] [CrossRef]
- Din, A.; Li, Y.; Yusuf, A. Delayed hepatitis B epidemic model with stochastic analysis. Chaos Solitons Fractals 2021, 146, 110839. [Google Scholar] [CrossRef]
- Meena, M.; Purohit, M.; Purohit, S.D.; Nisar, K.S. A nove linvestigation of the hepatitis B virus using a fractional operator with anon-local kernel. Partial Differ. Equ. Appl. Math. 2023, 8, 100577. [Google Scholar] [CrossRef]
- Bhatter, S.; Jangid, K.; Purohit, S.D. A study of the Hepatitis B viruses infection using hilfer fractional derivative. Proc. Inst. Math. Mech. Natl. Acad. Sci. Azerbaijan 2022, 48, 100–117. [Google Scholar] [CrossRef]
- Cui, T.; Din, A.; Liu, P.; Khan, A. Impact of Levy noise on a stochastic Norovirus epidemic model with information intervention. Comput. Methods Biomech. Biomed. Eng. 2023, 26, 1086–1099. [Google Scholar] [CrossRef] [PubMed]
- El Fatini, M.; Sekkak, I. Lévy noise impact on a stochastic delayed epidemic model with Crowly–Martin incidence and crowding effect. Physica A 2020, 541, 123315. [Google Scholar] [CrossRef]
- Huo, L.; Dong, Y.; Lin, T. Dynamics of a stochastic rumor propagation model incorporating media coverage and driven by Lévy noise. Chin. Phys. B 2021, 30, 080201. [Google Scholar] [CrossRef]
- Berrhazi, B.E.; El Fatini, M.; Caraballo, T.; Pettersson, R. A stochastic SIRI epidemic model with Lévy noise. Discret. Contin. Dyn. Syst.-Ser. B 2018, 23, 3645–3661. [Google Scholar] [CrossRef]
- Dubkov, A.A.; Spagnolo, B.; Uchaikin, V.V. Lévy flight super diffusion: An introduction. Int. J. Bifurc. Chaos 2008, 18, 2649–2672. [Google Scholar] [CrossRef]
- Dubkov, A.A.; Spagnolo, B. Verhulst model with Lévy white noise excitation. Eur. Phys. J. B 2008, 65, 361–367. [Google Scholar] [CrossRef]
- Din, A.; Li, Y. Lévy noise impact on a stochastic hepatitis B epidemic model under real statistical data and its fractal–fractional Atangana–Baleanu order model. Phys. Scr. 2021, 96, 124008. [Google Scholar] [CrossRef]
- Guarcello, C.; Valenti, D.; Carollo, A.; Spagnolo, B. Effects of Lévy noise on the dynamics of sine-Gordon solitons in long Josephson junctions. J. Stat. Mech. 2016, 2016, 054012. [Google Scholar] [CrossRef]
- Dubkov, A.A.; Cognata, A.L.; Spagnolo, B. The problem of analytical calculation of barrier crossing characteristics for Lévy flights. J. Stat. Mech. 2009, 1, P01002. [Google Scholar] [CrossRef]
- Dubkov, A.A.; Spagnolo, B. Langevin approach to Lévy flights in fixed potentials: Exact results for stationary probability distributions. Acta Phys. Pol. B 2007, 38, 1745–1758. [Google Scholar]
- Pizzolato, N.; Fiasconaro, A.; Adorno, D.P.; Spagnolo, B. Resonant activation in polymer translocation: New insights into the escape dynamics of molecules driven by an oscillating field. Phys. Biol. 2010, 7, 034001. [Google Scholar] [CrossRef] [PubMed]
- Dubkov, A.A.; Spagnolo, B. Acceleration of diffusion in randomly switching potential with supersymmetry. Phys. Rev. E 2005, 72, 041104. [Google Scholar] [CrossRef]
- Shah, S.M.A.; Nie, Y.; Din, A.; Alkhazzan, A. Stochastic optimal control analysis for HBV epidemic model with vaccination. Res. Sq. 2024, preprint. [Google Scholar] [CrossRef]
- Xing, J.; Li, Y. Explosive solutions for stochastic differential equations driven by Lévy processes. J. Math. Anal. Appl. 2017, 454, 94–105. [Google Scholar] [CrossRef]
- Chunyan, J.; Daqing, J. Threshold behaviour of a stochastic SIR model. Appl. Math. Model. 2014, 38, 5067–5079. [Google Scholar]
- Xu, C.Y.; Li, X.Y. The threshold of a stochastic delayed SIRS epidemic model with temporary immunity and vaccination. Chaos Solitons Fractals 2018, 111, 227–234. [Google Scholar] [CrossRef]
- Zhou, Y.L.; Zhang, W.G. Threshold of a stochastic SIR epidemic model with Le´vy jumps. Physica A 2016, 446, 204–216. [Google Scholar] [CrossRef]
- Khan, T.; Khan, A.; Zaman, G. The extinction and persistence of the stochastic hepatitis B epidemic model. Chaos Solitons Fractals 2018, 108, 123–128. [Google Scholar] [CrossRef]
- Din, A.; Li, Y. Stochastic optimal control for norovirus transmission dynamics by contaminated food and water. Chin. Phys. B 2022, 31, 020202. [Google Scholar] [CrossRef]
- Zhao, Y.; Jiang, D. The threshold of a stochastic SIRS epidemic model with saturated incidence. Appl. Math. Lett. 2014, 34, 90–93. [Google Scholar] [CrossRef]
- Zhao, Y.; Jiang, D. The threshold of a stochastic SIS epidemic model with vaccination. Appl. Math. Comput. 2014, 243, 718–727. [Google Scholar] [CrossRef]
- Zhu, Y.; Wang, L.; Qiu, Z. Dynamics of a stochastic cholera epidemic model with Le´vy process. Physica A 2022, 595, 127069. [Google Scholar] [CrossRef]
- Leng, X.N.; Feng, T.; Meng, X.Z. Stochastic inequalities and applications to dynamics analysis of a novel SIVS epidemic model with jumps. J. Inequal. Appl. 2017, 2017, 138. [Google Scholar] [CrossRef] [PubMed]
- Danane, J.; Allali, K.; Hammouch, Z.; Nisar, K.S. Mathematical analysis and simulation of a stochastic COVID-19 Le´vy jump model with isolation strategy. Results Phys. 2021, 23, 103994. [Google Scholar] [CrossRef]
- Mao, X.; Wei, F.; Wiriyakraikul, T. Positivity preserving truncated Euler-Maruyama method for stochastic Lotka-Volterra competition model. J. Comput. Appl. Math. 2021, 394, 113566. [Google Scholar] [CrossRef]
- Zhai, X.; Li, W.; Wei, F.; Mao, X. Dynamics of an HIV/AIDS transmission model with protection awareness and fluctuations. Chaos Solitons Fractals 2023, 169, 113224. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description of Symbol |
|---|---|
| The birth flux into the susceptible class. | |
| Rate at which the infection spreads from the susceptible to the acute compartment. | |
| Frequency of infections from chronic to susceptible. | |
| Transfer rate of the virus from the acute class to the vaccinated. | |
| Transfer rate of the virus from the chronic class to the vaccinated. | |
| Waning immunity rate of vaccines. | |
| The natural death rate. | |
| Rate of vaccinations of the susceptibles. | |
| Rate at which chronically infected persons recover. | |
| Disease-related death rate in the chronic compartment. | |
| Rate at which acute infections progress to the chronic stage. | |
| Recovery rate of acute individuals. | |
| The rate at which newborn babies do not receive vaccines against the infection. | |
| Hospitalization rates for the acute and chronic populations, respectively. | |
| The recovery rate of hospitalized individuals and the mortality rate due to the infection, respectively. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shah, S.M.A.; Nie, Y.; Din, A.; Alkhazzan, A. Dynamics of Hepatitis B Virus Transmission with a Lévy Process and Vaccination Effects. Mathematics 2024, 12, 1645. https://doi.org/10.3390/math12111645
Shah SMA, Nie Y, Din A, Alkhazzan A. Dynamics of Hepatitis B Virus Transmission with a Lévy Process and Vaccination Effects. Mathematics. 2024; 12(11):1645. https://doi.org/10.3390/math12111645
Chicago/Turabian StyleShah, Sayed Murad Ali, Yufeng Nie, Anwarud Din, and Abdulwasea Alkhazzan. 2024. "Dynamics of Hepatitis B Virus Transmission with a Lévy Process and Vaccination Effects" Mathematics 12, no. 11: 1645. https://doi.org/10.3390/math12111645
APA StyleShah, S. M. A., Nie, Y., Din, A., & Alkhazzan, A. (2024). Dynamics of Hepatitis B Virus Transmission with a Lévy Process and Vaccination Effects. Mathematics, 12(11), 1645. https://doi.org/10.3390/math12111645