
Distributed Drive Autonomous Vehicle Trajectory Tracking Control Based on Multi-Agent Deep Reinforcement Learning


Abstract
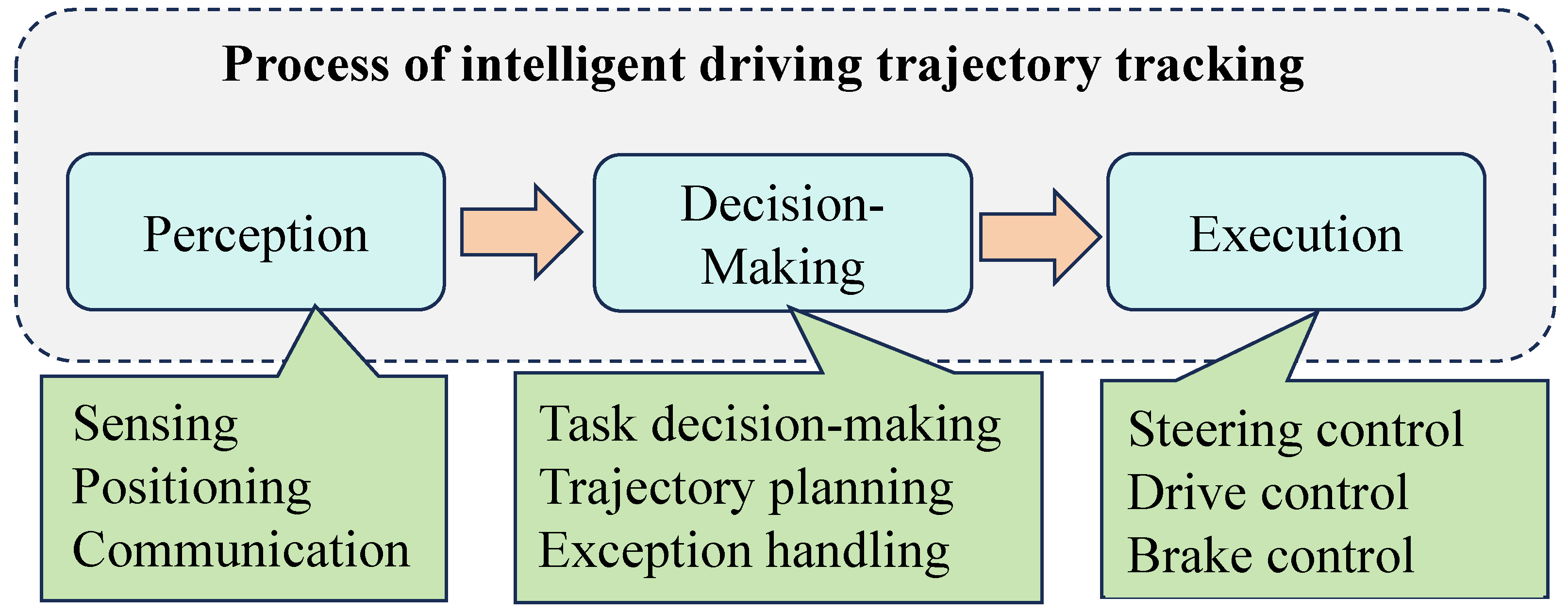
1. Introduction
2. Trajectory Tracking Control for DDAVs Based on MADRL
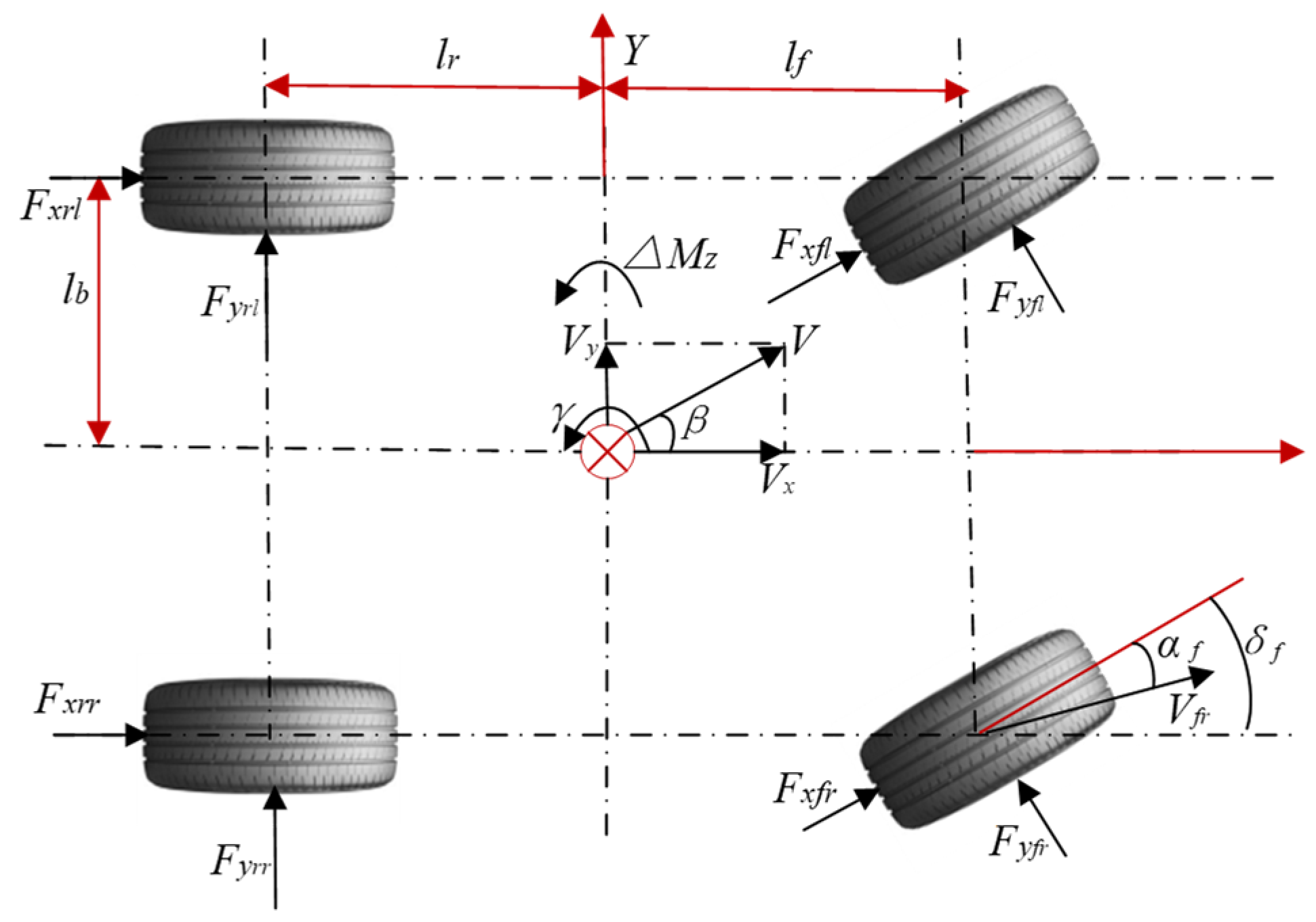
2.1. Analysis of Longitudinal and Lateral Motion Control for DDAVs
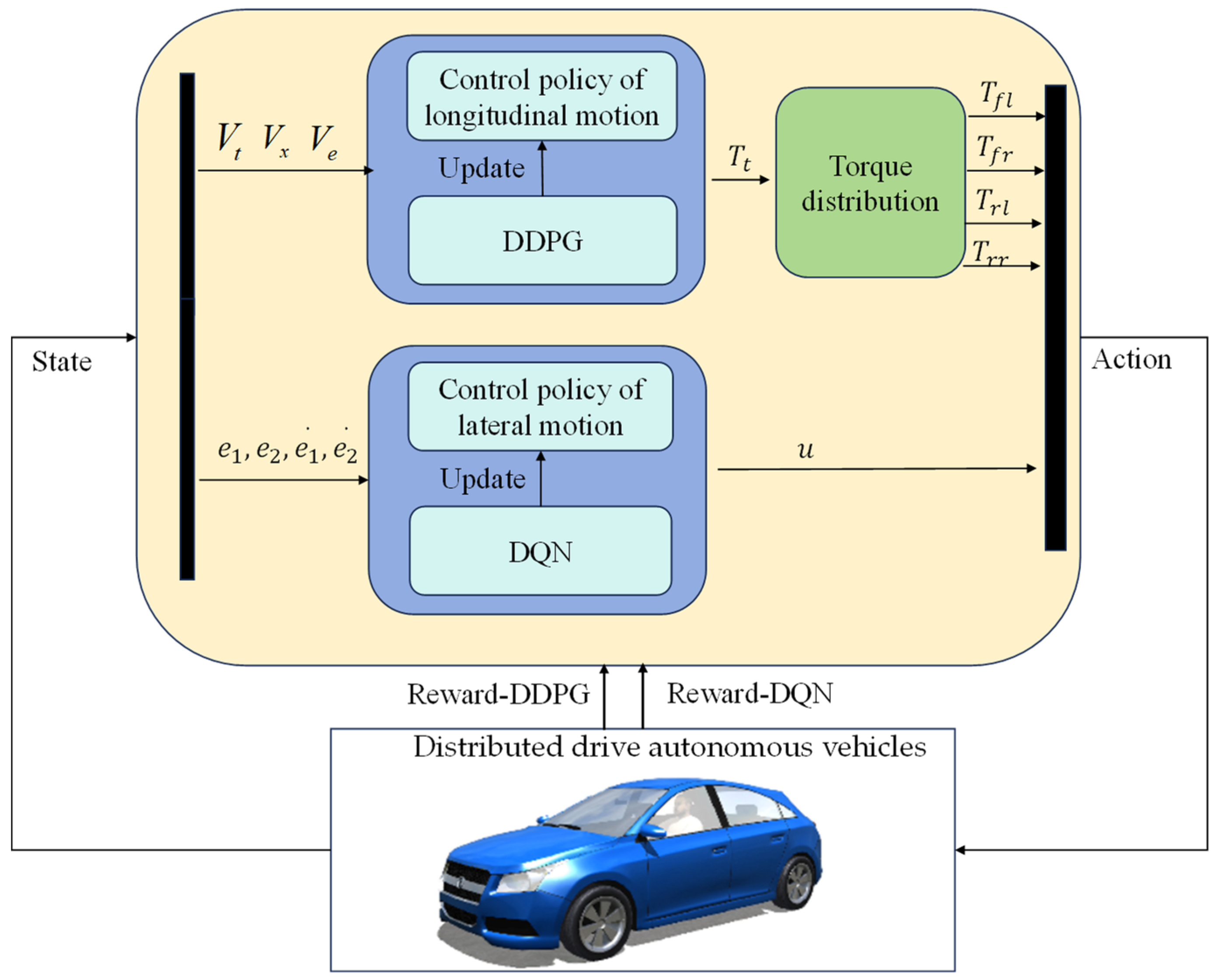
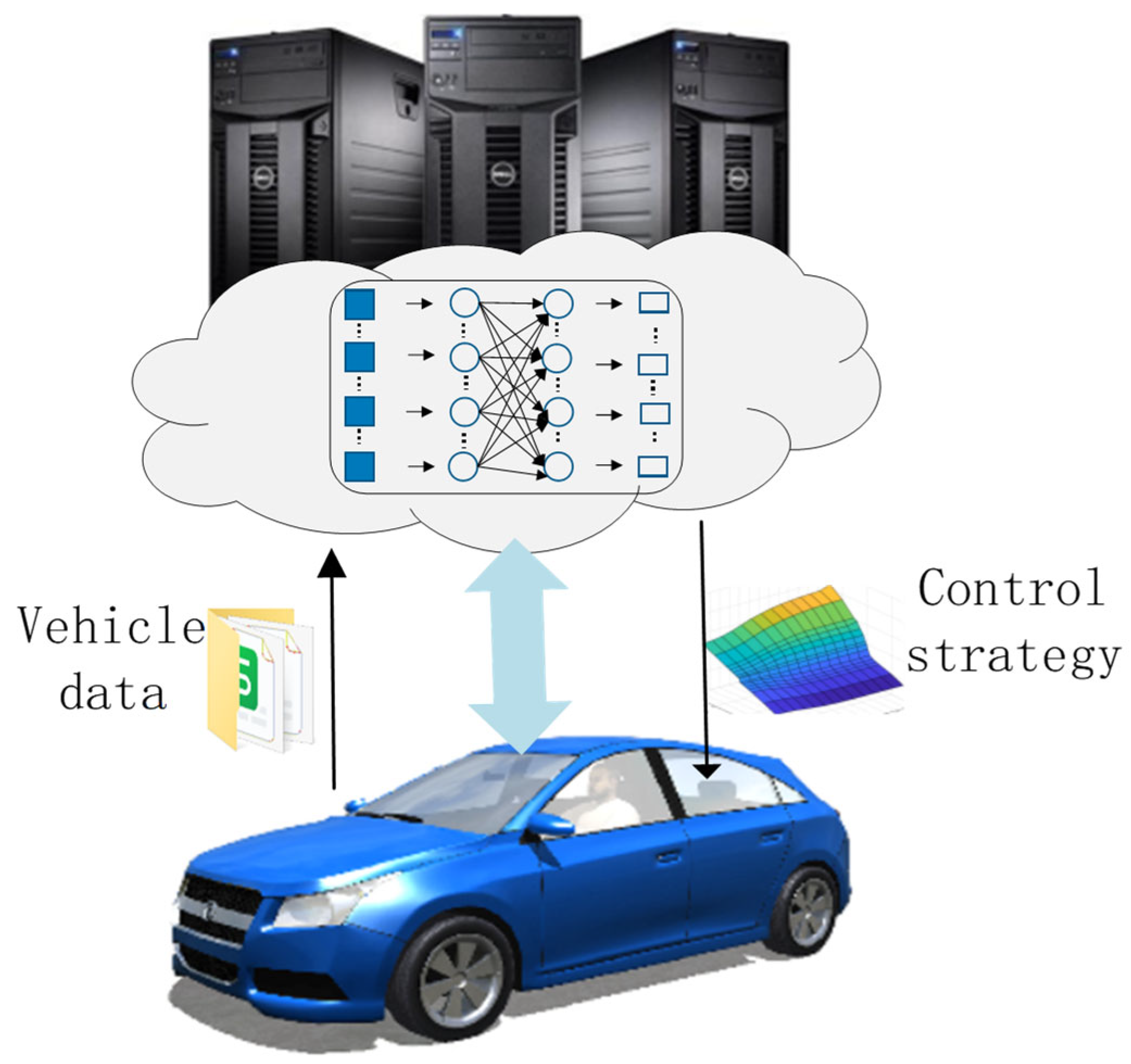
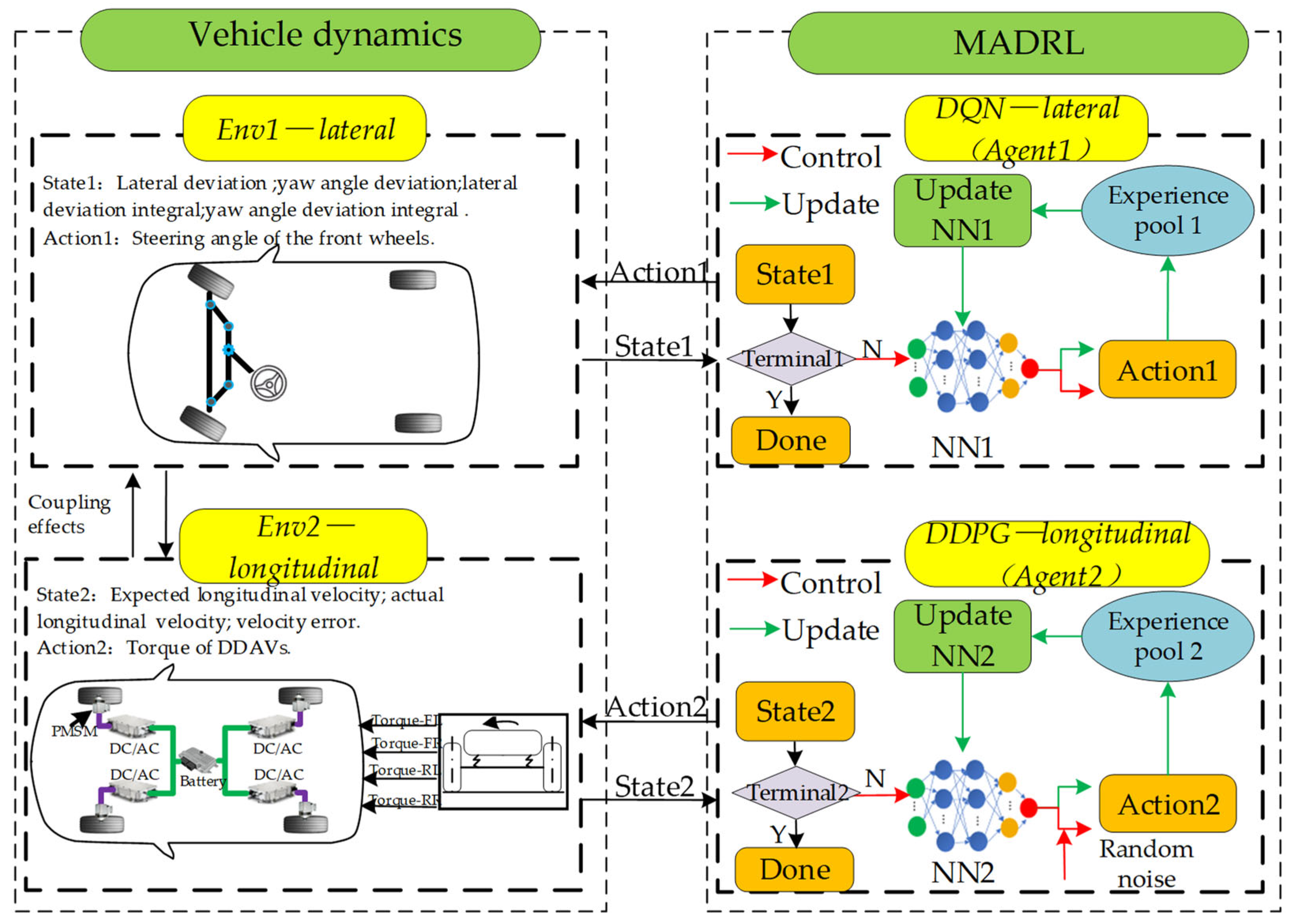
2.2. Design of the MADRL Controller
2.2.1. Design of Reward or Penalty Functions
- (1)
- Agent for lateral control
- (2)
- Agent for longitudinal control
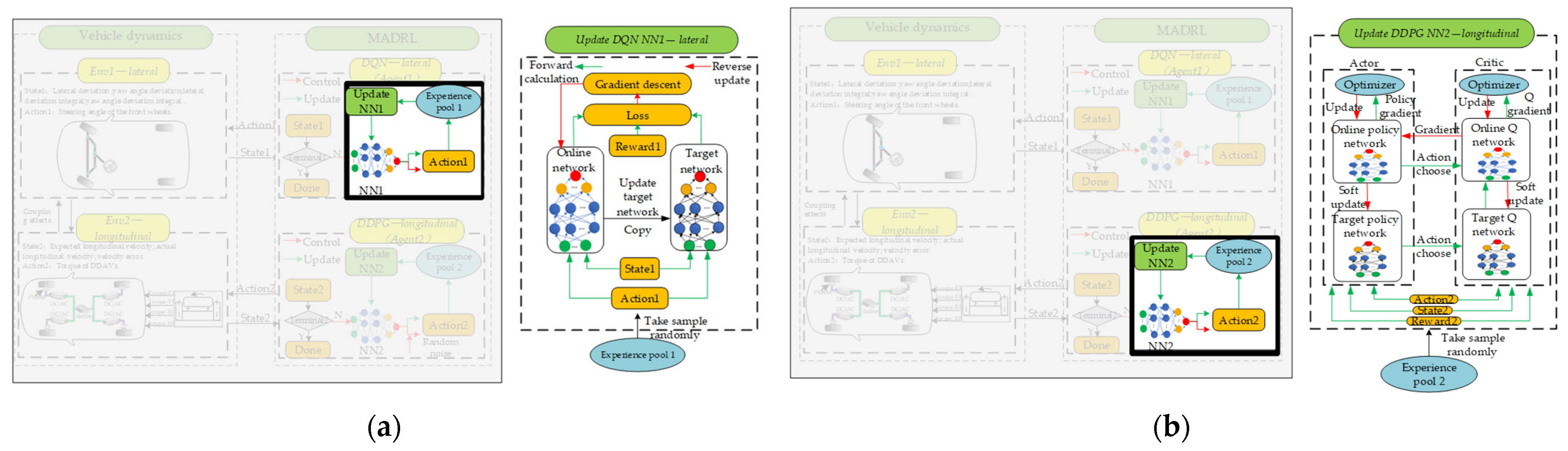
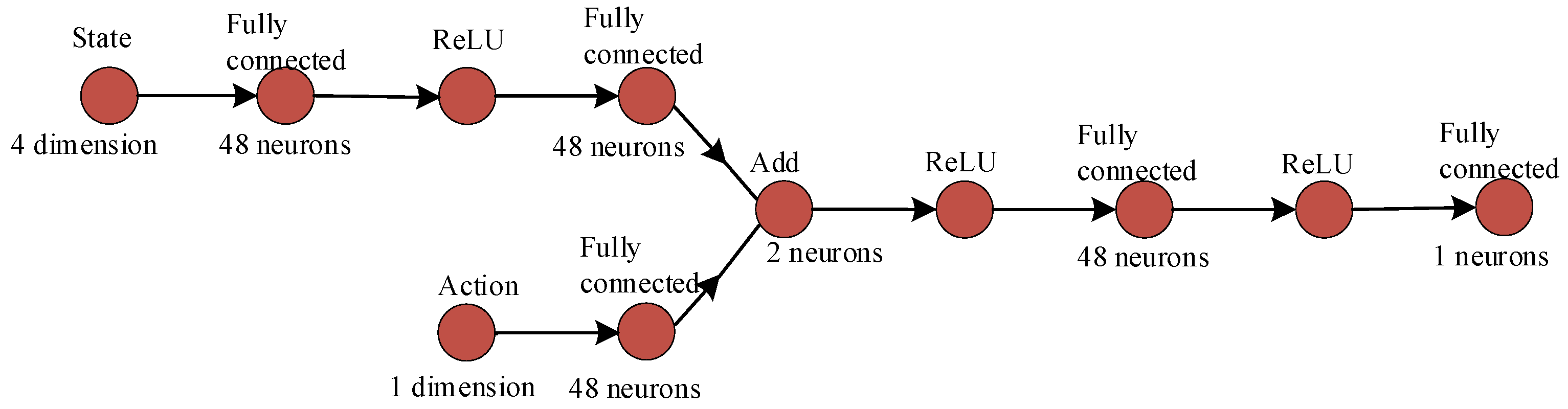
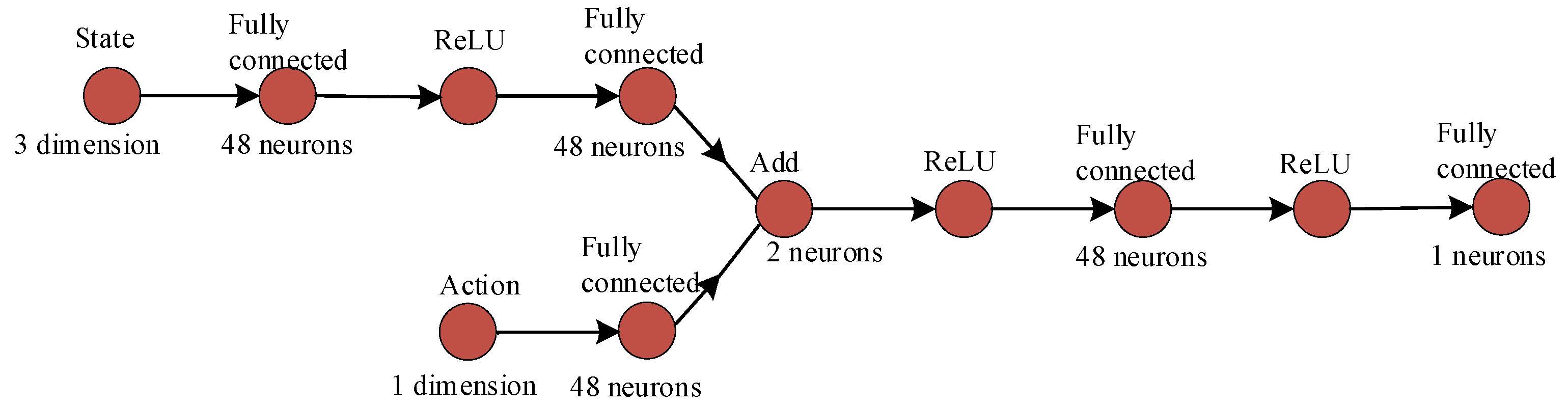
2.2.2. Design of DQN and DDPG Networks
3. Results and Discussion
3.1. Training and Experimental Setup
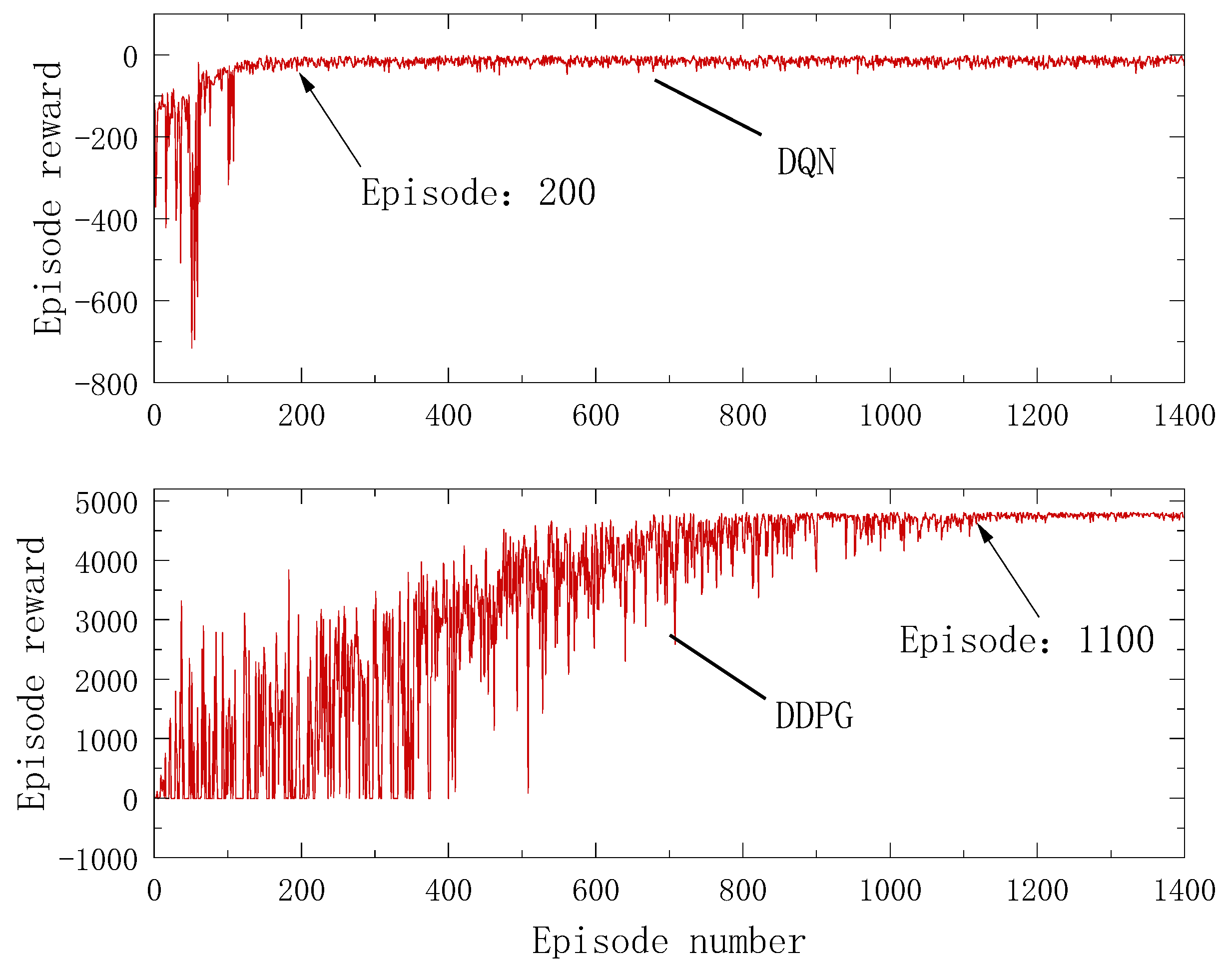
3.2. Iterative Training Results
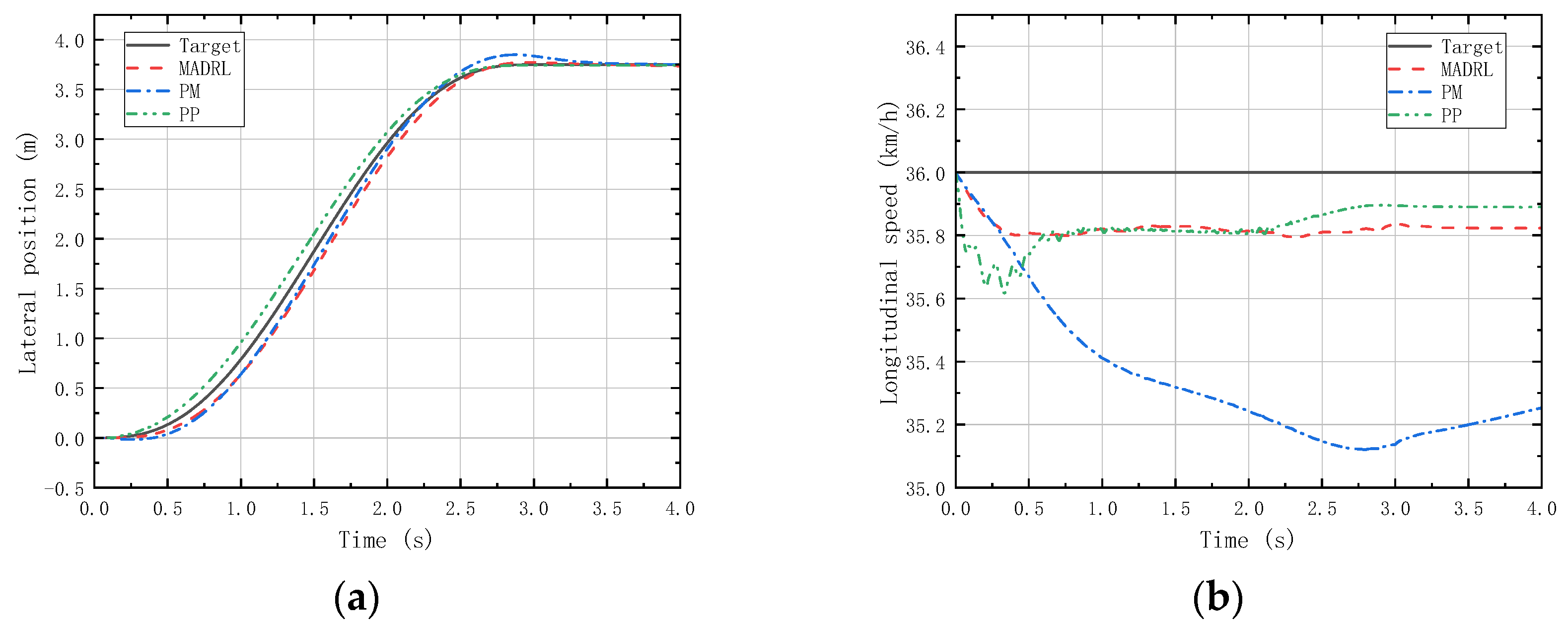
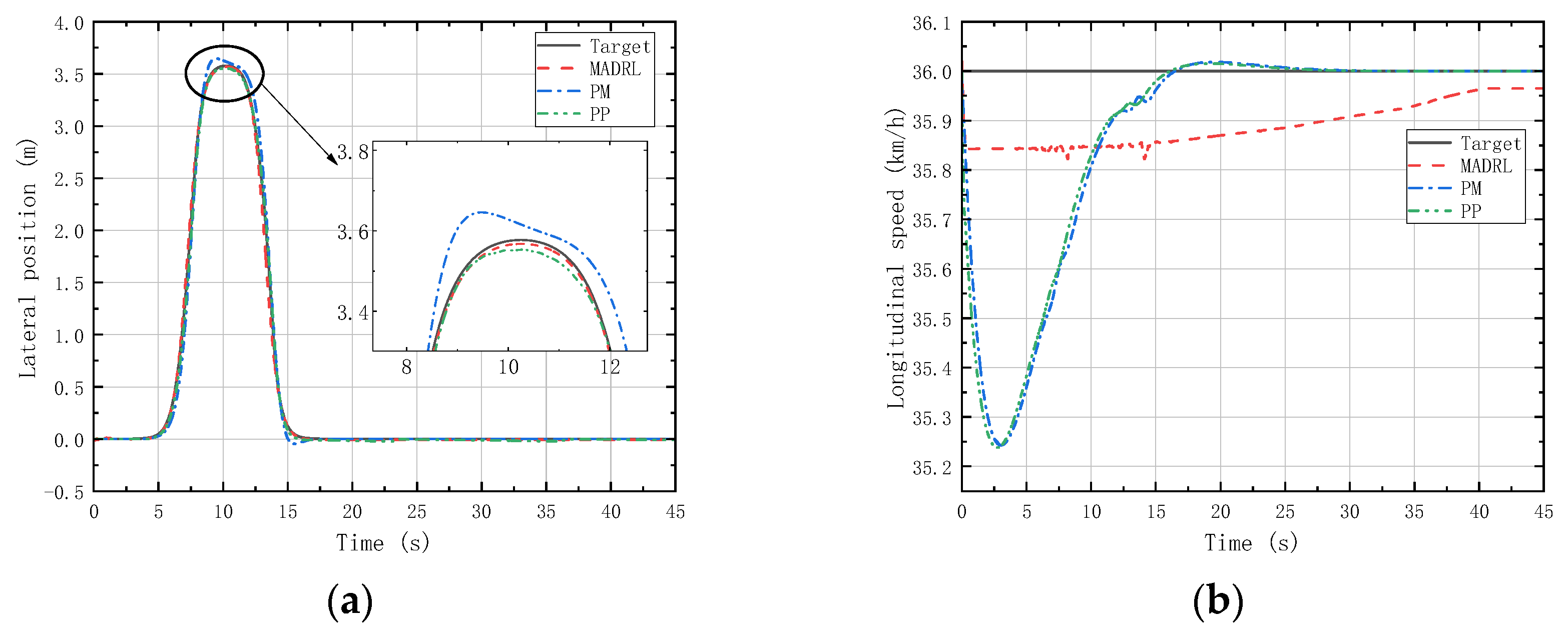
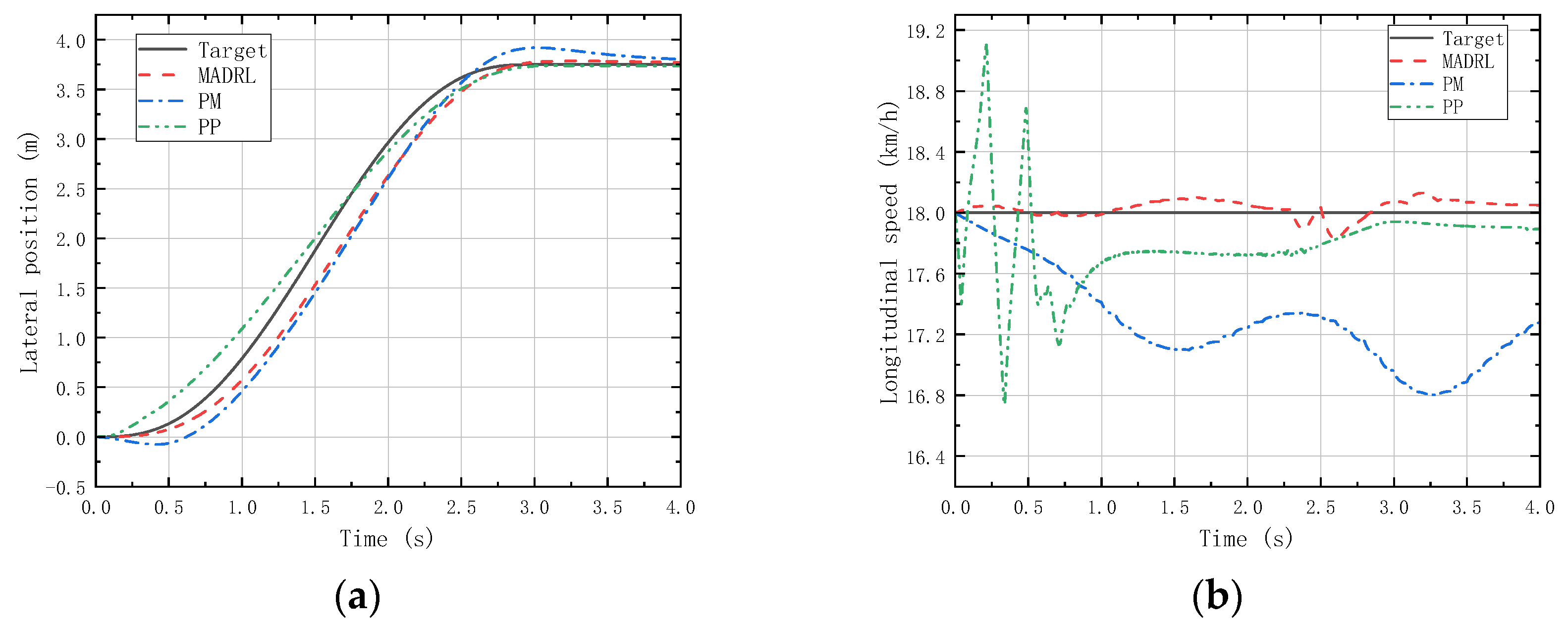
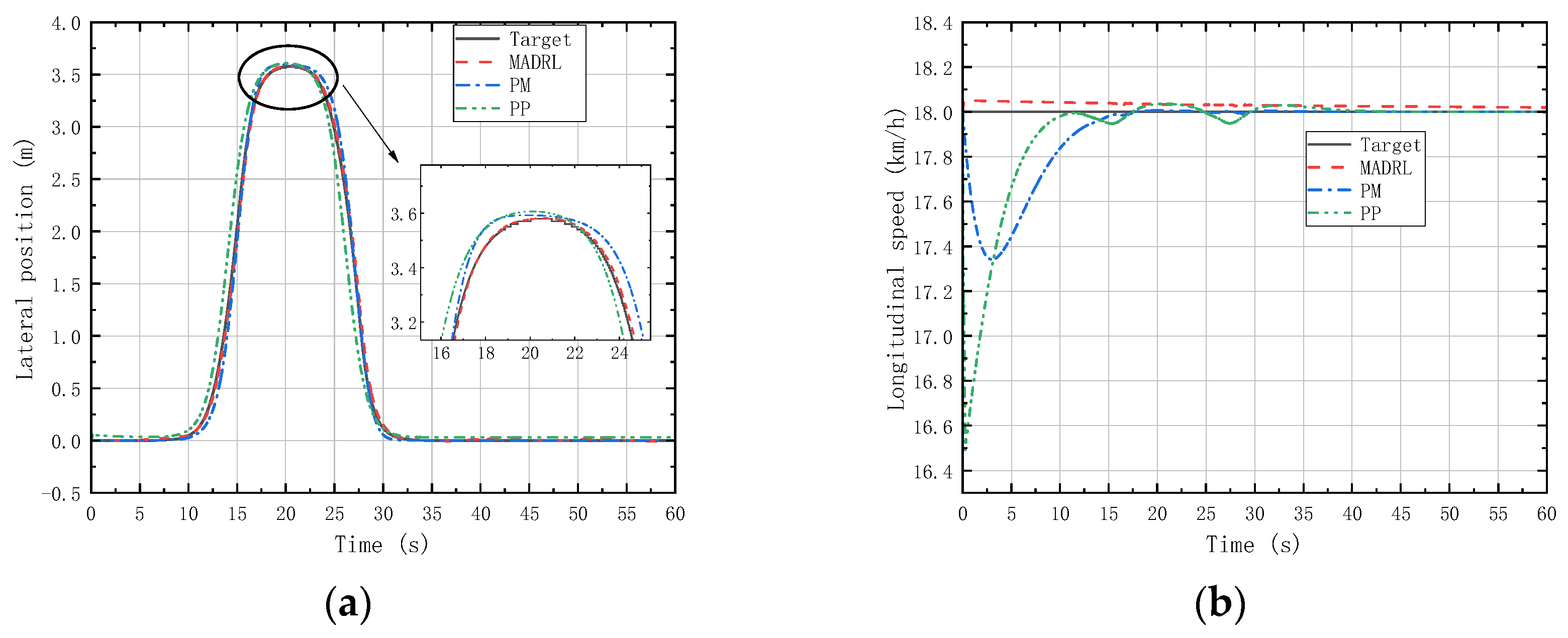
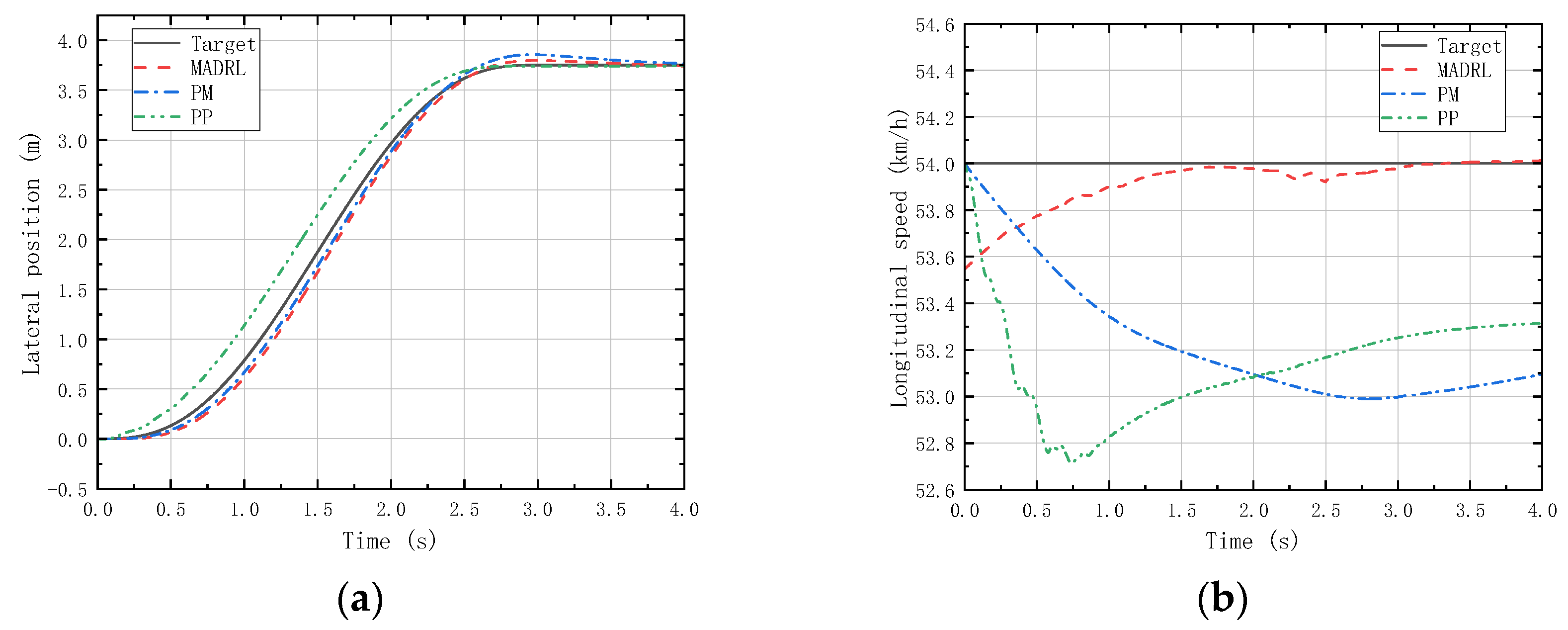
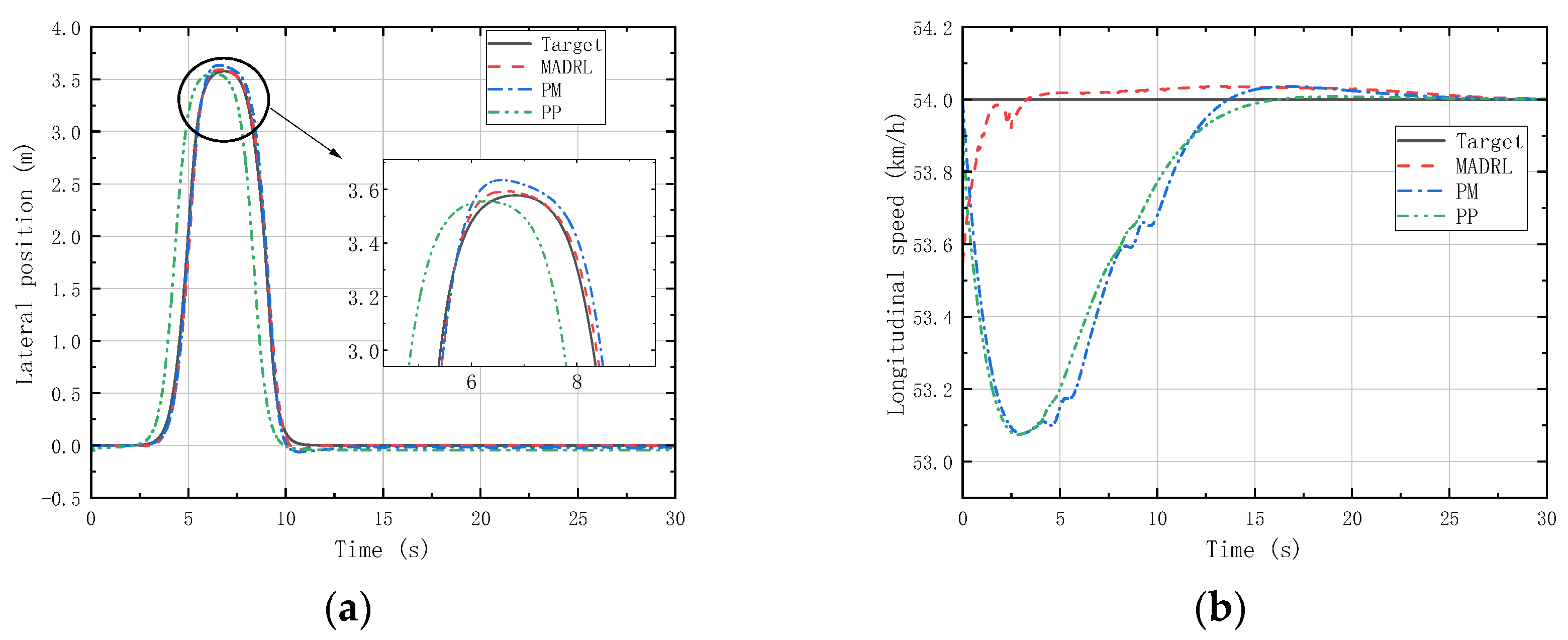
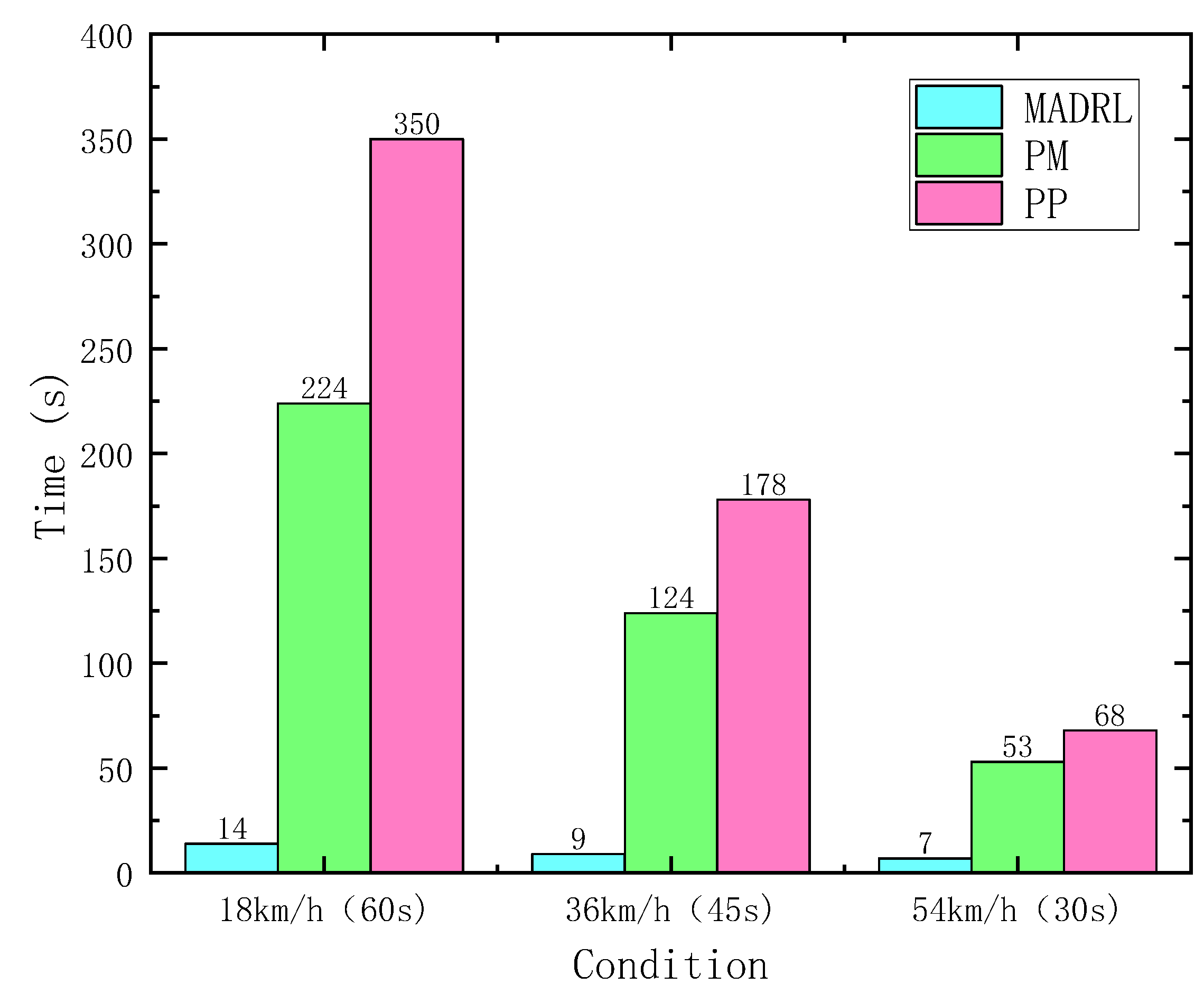
3.3. Validation of Control Policy Effectiveness and Generalization
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| vehicle mass | |
| tire rolling radius | |
| vehicle center of mass height | |
| wheel rotational inertia | |
| road friction coefficient | |
| adhesion coefficient | |
| dc drag coefficient | |
| longitudinal force of the tire | |
| lateral force of the tire | |
| vertical load on the driving wheel | |
| longitudinal velocity of the vehicle | |
| lateral velocity of the vehicle | |
| yaw rate of the vehicle | |
| yaw inertia coefficient of the vehicle | |
| average front wheel steering angle of the vehicle | |
| sideslip angle of the vehicle | |
| and | distances from the center of gravity to the front and rear axles |
| forward speed of the vehicle | |
| half of the wheelbase | |
| expected lateral position of the vehicle at the given moment | |
| actual lateral position of the vehicle at that moment | |
| expected yaw angle of the vehicle at the given moment | |
| actual yaw angle of the vehicle at that moment | |
| lateral position deviation of the vehicle | |
| yaw angle deviation of the vehicle | |
| respective rates of | |
| respective rates of | |
| front wheel steering command | |
| desired longitudinal velocity of the vehicle | |
| deviation of desired and actual longitudinal velocity | |
| accelerations or decelerations of the vehicle | |
| the torque commands sent to each driving motor |
References
- Jin, T.; Ding, W.; Yang, M.; Zhu, H.; Dai, P. Benchmarking Perception to Streaming Inputs in Vision-Centric Autonomous Driving. Mathematics 2023, 11, 4976. [Google Scholar] [CrossRef]
- Jin, T.; Zhang, C.; Zhang, Y.; Yang, M.; Ding, W. A Hybrid Fault Diagnosis Method for Autonomous Driving Sensing Systems Based on Information Complexity. Electronics 2024, 13, 354. [Google Scholar] [CrossRef]
- Lin, F.; Zhang, Y.; Zhao, Y.; Yin, G.; Zhang, H.; Wang, K. Trajectory tracking of autonomous vehicle with the fusion of DYC and longitudinal–lateral control. Chin. J. Mech. Eng. 2019, 32, 1–16. [Google Scholar] [CrossRef]
- Cremean, L.B.; Foote, T.B.; Gillula, J.H.; Hines, G.H.; Kogan, D.; Kriechbaum, K.L.; Lamb, J.C.; Leibs, J.; Lindzey, L.; Rasmussen, C.E. Alice: An information-rich autonomous vehicle for high-speed desert navigation. J. Field Robot. 2006, 23, 777–810. [Google Scholar] [CrossRef]
- Diab, M.K.; Ammar, H.H.; Shalaby, R.E. Self-driving car lane-keeping assist using pid and pure pursuit control. In Proceedings of the 2020 International Conference on Innovation and Intelligence for Informatics, Computing and Technologies (3ICT), Sakheer, Bahrain, 20–21 December 2020; pp. 1–6. [Google Scholar]
- Srinivas, C.; Patil, S.S. A Waypoint Tracking Controller for Autonomous Vehicles Using CARLA Simulator. In Recent Advances in Hybrid and Electric Automotive Technologies: Select Proceedings of HEAT 2021; Springer: Berlin/Heidelberg, Germany, 2022; pp. 197–206. [Google Scholar]
- Samak, C.V.; Samak, T.V.; Kandhasamy, S. Control strategies for autonomous vehicles. In Autonomous Driving and Advanced Driver-Assistance Systems (ADAS); CRC Press: Boca Raton, FL, USA, 2021; pp. 37–86. [Google Scholar]
- Chen, S.; Chen, H. MPC-based path tracking with PID speed control for autonomous vehicles. In Proceedings of the IOP Conference Series: Materials Science and Engineering, Hangzhou, China, 18–20 April 2020; p. 012034. [Google Scholar]
- Samuel, M.; Mohamad, M.; Hussein, M.; Saad, S.M. Lane keeping maneuvers using proportional integral derivative (PID) and model predictive control (MPC). J. Robot. Control (JRC) 2021, 2, 78–82. [Google Scholar] [CrossRef]
- Nie, L.; Guan, J.; Lu, C.; Zheng, H.; Yin, Z. Longitudinal speed control of autonomous vehicle based on a self-adaptive PID of radial basis function neural network. IET Intell. Transp. Syst. 2018, 12, 485–494. [Google Scholar] [CrossRef]
- Jo, A.; Lee, H.; Seo, D.; Yi, K. Model-reference adaptive sliding mode control of longitudinal speed tracking for autonomous vehicles. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2023, 237, 493–515. [Google Scholar] [CrossRef]
- Dahiwale, P.B.; Chaudhari, M.A.; Kumar, R.; Selvaraj, G. Model Predictive Longitudinal Control for Autonomous Driving. In Proceedings of the 2023 IEEE 3rd International Conference on Sustainable Energy and Future Electric Transportation (SEFET), Bhubaneswar, India, 9–12 August 2023; pp. 1–6. [Google Scholar]
- Hang, P. Longitudinal Velocity Tracking Control of a 4WID Electric Vehicle. IFAC-Pap. 2018, 51, 790–795. [Google Scholar] [CrossRef]
- Han, G.; Fu, W.; Wang, W.; Wu, Z. The lateral tracking control for the intelligent vehicle based on adaptive PID neural network. Sensors 2017, 17, 1244. [Google Scholar] [CrossRef]
- Park, M.-W.; Lee, S.-W.; Han, W.-Y. Development of lateral control system for autonomous vehicle based on adaptive pure pursuit algorithm. In Proceedings of the 2014 14th International Conference on Control, Automation and Systems (ICCAS 2014), Gyeonggi-do, Republic of Korea, 22–25 October 2014; pp. 1443–1447. [Google Scholar]
- Chen, G.; Yao, J.; Hu, H.; Gao, Z.; He, L.; Zheng, X. Design and experimental evaluation of an efficient MPC-based lateral motion controller considering path preview for autonomous vehicles. Control Eng. Pract. 2022, 123, 105164. [Google Scholar] [CrossRef]
- Huang, H.; Huang, X.; Ding, W.; Yang, M.; Yu, X.; Pang, J. Vehicle vibro-acoustical comfort optimization using a multi-objective interval analysis method. Expert Syst. Appl. 2023, 213, 119001. [Google Scholar] [CrossRef]
- Huang, H.; Lim, T.C.; Wu, J.; Ding, W.; Pang, J. Multitarget prediction and optimization of pure electric vehicle tire/road airborne noise sound quality based on a knowledge-and data-driven method. Mech. Syst. Signal Process. 2023, 197, 110361. [Google Scholar] [CrossRef]
- Huang, H.; Huang, X.; Ding, W.; Yang, M.; Fan, D.; Pang, J. Uncertainty optimization of pure electric vehicle interior tire/road noise comfort based on data-driven. Mech. Syst. Signal Process. 2022, 165, 108300. [Google Scholar] [CrossRef]
- Gueriani, A.; Kheddar, H.; Mazari, A.C. Deep Reinforcement Learning for Intrusion Detection in IoT: A Survey. In Proceedings of the 2023 2nd International Conference on Electronics, Energy and Measurement (IC2EM), Medea, Algeria, 28–29 November 2023; pp. 1–7. [Google Scholar]
- Karalakou, A.; Troullinos, D.; Chalkiadakis, G.; Papageorgiou, M. Deep Reinforcement Learning Reward Function Design for Autonomous Driving in Lane-Free Traffic. Systems 2023, 11, 134. [Google Scholar] [CrossRef]
- Li, D.; Okhrin, O. Vision-Based DRL Autonomous Driving Agent with Sim2Real Transfer. In Proceedings of the 2023 IEEE 26th International Conference on Intelligent Transportation Systems (ITSC), Bilbao, Spain, 28–29 November 2023; pp. 866–873. [Google Scholar]
- Ashwin, S.H.; Naveen Raj, R. Deep reinforcement learning for autonomous vehicles: Lane keep and overtaking scenarios with collision avoidance. Int. J. Inf. Tecnol. 2023, 15, 3541–3553. [Google Scholar] [CrossRef]
- Vimal Kumar, A.R.; Theerthala, R.R. Reinforcement Learning based Parking Space Egress for Autonomous Driving; SAE Technical Paper: Warrendale, PA, USA, 2024; ISSN 0148-7191. [Google Scholar]
- Fu, Y.; Li, C.; Yu, F.R.; Luan, T.H.; Zhang, Y. A decision-making strategy for vehicle autonomous braking in emergency via deep reinforcement learning. IEEE Trans. Veh. Technol. 2020, 69, 5876–5888. [Google Scholar] [CrossRef]
- Wei, H.; Zhang, N.; Liang, J.; Ai, Q.; Zhao, W.; Huang, T.; Zhang, Y. Deep reinforcement learning based direct torque control strategy for distributed drive electric vehicles considering active safety and energy saving performance. Energy 2022, 238, 121725. [Google Scholar] [CrossRef]
- Lin, X.; Ye, Z.; Zhou, B. DQN Reinforcement Learning-based Steering Control Strategy for Autonomous Driving. J. Mech. Eng. 2023, 59, 315–324. [Google Scholar]
- Yao, J.; Ge, Z. Path-Tracking Control Strategy of Unmanned Vehicle Based on DDPG Algorithm. Sensors 2022, 22, 7881. [Google Scholar] [CrossRef]
- Abe, M. Vehicle Handling Dynamics: Theory and Application; Butterworth-Heinemann: Oxford, UK, 2015. [Google Scholar]
- Lim, E.H.; Hedrick, J.K. Lateral and longitudinal vehicle control coupling for automated vehicle operation. In Proceedings of the 1999 American Control Conference (Cat. No. 99CH36251), San Diego, CA, USA, 2–4 June 1999; pp. 3676–3680. [Google Scholar]
- Han, P.; Zhang, B. Path planning and trajectory tracking strategy of autonomous vehicles. Math. Probl. Eng. 2021, 2021, 8865737. [Google Scholar] [CrossRef]
- Buşoniu, L.; Babuška, R.; De Schutter, B. Multi-agent reinforcement learning: An overview. Innov. Multi-Agent Syst. Appl. 2010, 1, 183–221. [Google Scholar]
- Zhang, S.-L.; Wen, C.-K.; Ren, W.; Luo, Z.-H.; Xie, B.; Zhu, Z.-X.; Chen, Z.-J. A joint control method considering travel speed and slip for reducing energy consumption of rear wheel independent drive electric tractor in ploughing. Energy 2023, 263, 126008. [Google Scholar] [CrossRef]
- Xiong, J.; Wang, Q.; Yang, Z.; Sun, P.; Han, L.; Zheng, Y.; Fu, H.; Zhang, T.; Liu, J.; Liu, H. Parametrized deep q-networks learning: Reinforcement learning with discrete-continuous hybrid action space. arXiv 2018, arXiv:1810.06394. [Google Scholar]
- Pacejka, H. Tire and Vehicle Dynamics; Elsevier: Amsterdam, The Netherlands, 2005. [Google Scholar]
- Burhaumudin, M.S.; Samin, P.M.; Jamaluddin, H.; Rahman, R.; Sulaiman, S. Modeling and validation of magic formula tire model. In Proceedings of the International Conference on the Automotive Industry, Mechanical and Materials Science (ICAMME’2012), Penang, Malaysia, 19 May 2012; pp. 113–117. [Google Scholar]
- Ji, X.; He, X.; Lv, C.; Liu, Y.; Wu, J. Adaptive-neural-network-based robust lateral motion control for autonomous vehicle at driving limits. Control Eng. Pract. 2018, 76, 41–53. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hyperparameters | Values |
|---|---|
| Learn rate | 1 × 10−3 |
| Discount factor | 0.99 |
| Experience buffer | 1 × 106 |
| Minibatch size | 128 |
| Target smooth factor | 1 × 10−3 |
| Maximum episode | 1400 |
| Training time consumed | Almost 300 min |
| Hyperparameters | Values |
|---|---|
| Learn rate of actor network | 1 × 10−4 |
| Learn rate of critic network | 1 × 10−3 |
| Experience buffer | 1 × 106 |
| Minibatch size | 128 |
| Target smooth factor | 1 × 10−3 |
| Discount factor | 0.99 |
| Noise variance | 0.6 |
| Noise variance decay rate | 1 × 10−5 |
| Maximum episode | 1400 |
| Training time consumed | Almost 300 min |
| Symbol | Description | Value |
|---|---|---|
| Vehicle mass/kg | 1412 | |
| Distance from the center of mass to the front axle/m | 1.015 | |
| Distance from the center of mass to the rear axle/m | 1.895 | |
| Front track/m | 1.675 | |
| Rear track/m | 1.675 | |
| Tire rolling radius/m | 0.325 | |
| Vehicle center of mass height/m | 0.54 | |
| Vehicle yaw moment of inertia/kg·m2 | 1536.7 | |
| Wheel rotational inertia/kg·m3 | 0.9 | |
| Road friction coefficient | 0.018 | |
| Adhesion coefficient | 0.8 | |
| dc drag coefficient | 0.4 |
| Comparison Metrics | PP | PM | MADRL | |
|---|---|---|---|---|
| The maximum lateral position deviation/m | 18 km/h | 0.21 | 0.09 | 0.02 |
| 36 km/h | 0.03 | 0.12 | 0.01 | |
| 54 km/h | 0.30 | 0.09 | 0.06 | |
| The maximum longitudinal velocity deviation/km/h | 18 km/h | 1.50 | 0.66 | 0.05 |
| 36 km/h | 0.77 | 0.76 | 0.14 | |
| 54 km/h | 0.94 | 0.93 | 0.40 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Ding, W.; Yang, M.; Zhu, H.; Liu, L.; Jin, T. Distributed Drive Autonomous Vehicle Trajectory Tracking Control Based on Multi-Agent Deep Reinforcement Learning. Mathematics 2024, 12, 1614. https://doi.org/10.3390/math12111614
Liu Y, Ding W, Yang M, Zhu H, Liu L, Jin T. Distributed Drive Autonomous Vehicle Trajectory Tracking Control Based on Multi-Agent Deep Reinforcement Learning. Mathematics. 2024; 12(11):1614. https://doi.org/10.3390/math12111614
Chicago/Turabian StyleLiu, Yalei, Weiping Ding, Mingliang Yang, Honglin Zhu, Liyuan Liu, and Tianshi Jin. 2024. "Distributed Drive Autonomous Vehicle Trajectory Tracking Control Based on Multi-Agent Deep Reinforcement Learning" Mathematics 12, no. 11: 1614. https://doi.org/10.3390/math12111614
APA StyleLiu, Y., Ding, W., Yang, M., Zhu, H., Liu, L., & Jin, T. (2024). Distributed Drive Autonomous Vehicle Trajectory Tracking Control Based on Multi-Agent Deep Reinforcement Learning. Mathematics, 12(11), 1614. https://doi.org/10.3390/math12111614