Abstract
This paper aims to study the distributed control problems of heterogeneous signed networks whose communication topologies are undirected. A distributed control protocol is designed based on neighboring state information. With this protocol be employed, the convergence results of the heterogeneous signed network are provided. It is shown that the heterogeneous signed network can achieve the static bipartite consensus (respectively, state stability) if and only if the signed graph is structurally balanced (respectively, unbalanced). The associated convergence analyses can be developed by constructing a suitable Lyapunov function. In addition, two simulation examples are presented to validate the correctness of the obtained results.
Keywords:
heterogeneous signed network; distributed protocol; static bipartite consensus; structural balance MSC:
37M22
1. Introduction
Networked systems mainly consist of multiple agents and interactions among agents, which can accomplish the tasks that are difficult for single agent. When the dynamics of all agents in the networked system are identical, we refer to this networked system as a homogeneous networked system. The dynamics of agents can include first-order integrators [1], second-order integrators [2], higher-order integrators [3], or general linear dynamics [4]. In order to improve the convergence speed of the networked system, distributed control problems with finite-time/fixed-time convergence have been studied [5]. If the dynamics of agents in the network are different, we refer to this network system as a heterogeneous networked system. Heterogeneous networked systems are quite common in our daily lives [6,7]. Some of these applications include the following:
- (1)
- Internet of Things (IoT): Heterogeneous networks play an important role in IoT applications, where diverse devices such as sensors, actuators, and smart appliances communicate and collaborate to collect and exchange data for monitoring, automation, and optimization purposes.
- (2)
- Smart cities: In urban environments, heterogeneous networked systems enable the integration of various infrastructures such as transportation systems, energy grids, public safety systems, and environmental monitoring systems. This integration facilitates efficient resource management, traffic optimization, waste management, and enhanced public services.
- (3)
- Military and defense: Heterogeneous networked systems are deployed in military and defense applications for situational awareness, battlefield communications, unmanned vehicle control, and intelligence gathering. Integration of various sensors, platforms, and communication technologies enhances military capabilities and mission effectiveness.
When considering only cooperative interactions between agents, this kind of networked systems is referred to as unsigned networks. The distributed control problems of unsigned network systems whose agents contains heterogeneous dynamics have attracted widespread attentions. When the communication topology of unsigned networks is undirected, Ref. [8] has provided the conditions for achieving consensus when the agents’ dynamic simultaneously includes first-order integrators and second-order integrators. Ref. [9] has extended the results of [8] to the case of directed fixed and switching topologies. When the communication topology is disconnected, Ref. [10] investigates the group consensus control problem of heterogeneous unsigned networks. To ensure the convergence speed of the unsigned networks, nonlinear distributed control protocols have been proposed to achieve finite-time consensus [11], fixed-time consensus [12,13], and predetermined-time consensus [14] objectives for all agents. Considering the agent structure as general linear dynamics, Refs. [15,16,17,18] have studied the output consensus problem of heterogeneous unsigned networks. Ref. [19] has further investigated the output control problems under switching topologies based on Lyapunov stability analysis methods. Ref. [20] has designed a sub-linear control protocol based on sliding mode control, which can guarantee achieving consensus within finite time. Ref. [21] has studied the predetermined-time consensus problem, and the distributed control protocol designed can ensure consensus within the predetermined time. In addition, Ref. [22] has investigated the controllability problem of heterogeneous unsigned networks and provided conditions for the controllability.
When the interactions between agents involve not only cooperative but also antagonistic relationships, this class of networked systems is referred to as signed networks. They are termed as signed networks because this class of networked systems can be represented using a signed graph, where positive edge weights represent cooperative relationships between agents and negative edge weights represent antagonistic relationships between agents. Similarly, the distributed control problem of signed networks has also attracted significant attention. Ref. [23] has induced a distributed control protocol based on the Laplacian potential function to ensure the bipartite consensus and established a framework for studying the distributed control problem of signed networks. Considering agents with general linear dynamics, Ref. [24] has provided conditions for how to select the control gain matrix to achieve the bipartite consensus in signed networks. Ref. [25] has investigated the presence of input saturation constraints on agents and designed a distributed control protocol to achieve the bipartite consensus goals, which validated the effectiveness of the proposed protocol through experiments with obstacle avoidance using mobile robots. Ref. [26] has studied the bipartite consensus problems among agents with communication noise and provided solvable conditions. Ref. [27] has designed distributed control protocols using state feedback and output feedback and provided conditions for solving the bipartite consensus problems of signed networks. Ref. [28] has investigated distributed control problems with multiple fixed communication delays among agents, providing an upper bound for the allowable communication delay. Although recent research has yielded many promising results in the analyses of dynamic behaviors in signed networks, most of these studies focus on signed networks with homogeneous dynamics. Currently, there is relatively limited research on the distributed control problems of heterogeneous signed networks. Additionally, due to the existence of different dynamics of signed networks, the eigenvalue-based methods that are suitable for analyzing the convergence of homogeneous signed networks are no longer effective for studying the convergence of heterogeneous signed networks. Therefore, there is a challenge in finding a new approach to study the convergence of dynamic behaviors in heterogeneous signed networks.
Motivated by the above discussions, this paper aims to study the distributed control problems of signed networks with heterogeneous dynamics, where both first-order integrators and second-order integrators are considered. The contributions of this paper include three aspects:
- We propose a distributed control protocol based on the neighbor agents’ information. The proposed protocol can ensure the static bipartite consensus (respectively, state stability) if and only if the communication topology is structurally balanced (respectively, structurally unbalanced).
- We provide a Lyapunov-based approach to analyze the convergence of dynamic behaviors in heterogeneous signed networks. This method is applicable not only to structurally balanced signed networks but also to those that are structurally unbalanced.
- We extend the distributed control problems of homogeneous signed networks to heterogeneous signed networks. We give a method for designing suitable distributed control protocols and analyzing their convergence, which can significantly generalize the existing results of signed networks [23].
The remainder of this paper is organized as follows: Section 2 provides some basic knowledge of signed graphs. Section 3 presents the problem statement. Section 4 gives the main results of static bipartite consensus. Section 5 gives the simulation results. In addition, the conclusions are provided in Section 6.
Notations: we denote , 2, ⋯, , , 1, ⋯, , , 0, ⋯, , and , , ⋯, as a diagonal matrix whose diagonal elements are , , ⋯, and non-diagonal elements are zero. For any real number , let be its absolute value and be its sign, i.e.,
2. Preliminaries
A signed network can be described by a signed graph, where nodes can represent agents, and edges with positive and negative weights can denote the cooperative and antagonistic interactions among agents.
Let , , denote a signed graph of n-order, where , , ⋯, is a node set with n nodes, , is an edge set, and is the adjacent weight matrix whose element satisfies . We assume that there are no self-loops in the signed graph , i.e., for . If the edge exists, then we say that is a neighbor of and all neighbors of can be denoted by . The in-degree of is and the in-degree matrix is given by
The Laplacian matrix of is defined as and its element satisfies
There is a directed path , , , , ⋯, , with m edges, in which , , , ⋯, , are different nodes. For a signed graph , if there exists a directed path between any two nodes, then is referred to as strongly connected. If holds, we refer to the signed graph as undirected. It can be easily developed that also holds when the signed graph is undirected. Below, we present the concepts of structural balance and unbalance, which play a significant role in studying distributed control problems of signed networks.
Definition 1.
For a signed graph , all of its nodes can be divided into two sets: and , such that and . If the two following conditions hold:
- 1.
- When two nodes and belong to the same set, i.e., , , , the weight holds;
- 2.
- When two nodes and belong to different sets, i.e., and , , the weight holds.
then we say that is structurally balanced, and, otherwise, is structurally unbalanced.
When all negative weights in the signed graph are transformed into the associated positive weights, a new induced unsigned graph , , is obtained, where . When the signed graph is structurally balanced, there is a diagonal matrix , , ⋯, , , , such that holds. In the following, we provide an example.
Example 1.
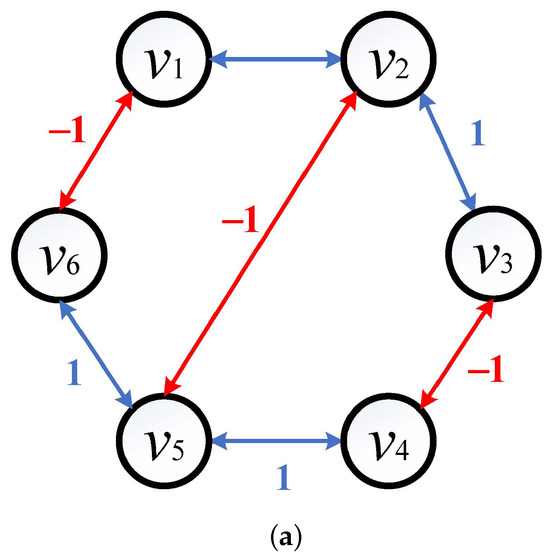
There are two signed undirected graphs in Figure 1. It is easy to see that all the vertices in can be divided into two groups: , , and , , . The weights of all edges within each group are non-negative and the weights of all edges between the two groups are non-positive, which satisfy the definition of structural balance. Therefore, the signed graph is structurally balanced. Conversely, for the signed graph , it is impossible to find two such subsets, which does not satisfy the definition of structural balance. Hence, the signed graph is structurally unbalanced.
Figure 1.
Two signed undirected graphs, (a): and (b): .
It follows from Figure 1 that the adjacent weight matrix of is given by
Since the signed undirected graph is structurally balanced, there exists a diagonal matrix such that holds, i.e.,
3. Problem Statements
A signed network can be depicted through a signed graph, wherein nodes symbolize agents and edges denote interactions between these agents. Positive weights indicate cooperative relationships among agents, while negative weights denote antagonistic relationships. We consider a heterogeneous signed network with n agents whose dynamics are described by
where and are the position state and velocity state, respectively, and is the control input to be designed. For any initial states, we say that the system (1) can achieve the following:
- Static bipartite consensus if
- State stability if
Next, we aim to explore how to ensure that the system (1) can achieve the bipartite consensus and state stability, respectively.
4. Main Results
The distributed control protocol is designed as follows:
with
where is an auxiliary variable.
Theorem 1.
Proof.
We can construct a candidate Lyapunov function:
We can easily verify that is positive definite. Taking the derivative of with respect to the time t, we can obtain
We bring Equation (3) into to get
Because of the fact that the signed graph is undirected and connected, we can deduce that its adjacency weight matrix A is symmetric, i.e., , . We can further induce
Therefore, we can deduce
Due to
we have
Substituting Equations (4)–(6) into and further simplifying, we can obtain
implies for , , ⋯, and for , 2, ⋯, . Because of , we can induce
(1) When is structurally balanced, we can derive
Because is structurally balanced, there exists a diagonal matrix such that holds. Then, we can rewrite (9) as
Therefore, we can derive that implies for some . We can further develop . The position’s states of the system (1) can achieve the bipartite consensus. Based on this, we can further develop , . Hence, we can induce
Hence, the system (1) can achieve the static bipartite consensus under the control of the protocol (2).
(2) When is structurally unbalanced, we can deduce
Because L is symmetric, it can be written as . We can derive
Hence, holds, which implies . This, together with , ensures . Thus,
which indicates the static state stability of the system (1) when the distributed protocol (2) is applied. We complete this proof. □
Remark 1.
According to Theorem 1, we can develop the convergence results of signed networks with heterogeneous dynamics. It is shown that with the proposed protocol being used, the signed network subject to both first-order and second-order integrators can achieve the static bipartite consensus (respectively, state stability) if and only if the associated signed graph is structurally balanced (respectively, unbalanced). Additionally, we should point out that the computational complexity of Theorem 1 is related to the number of agents in signed networks. This computational complexity may grow as the number of nodes increases.
5. Simulations
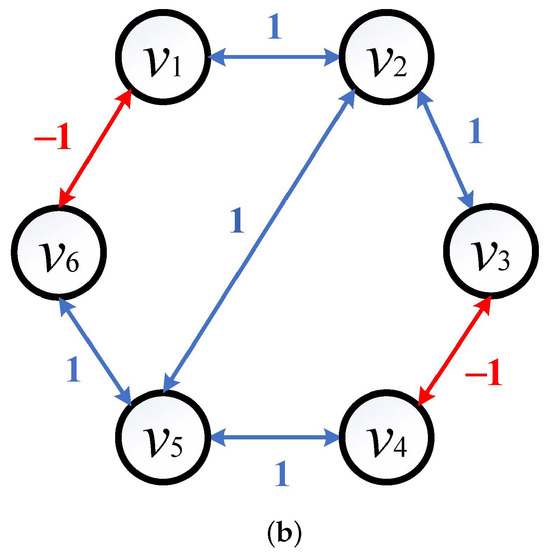
In this section, we introduce two examples to validate the correctness of the obtained results. We consider the system (1) consisting of eight agents, whose communication topology can be represented by Figure 2, where the dynamics of four agents , , , and are second-order integrators and the dynamics of four agents , , , and are first-order integrators. The initial states of these eight agents are selected as follows:
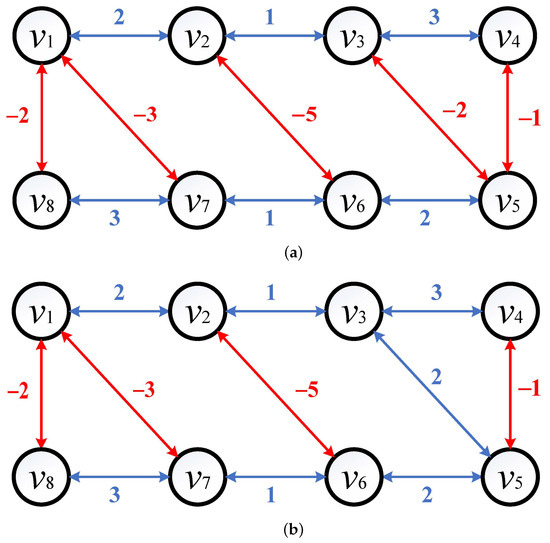
Figure 2.
Two signed undirected graphs, (a): and (b): .
Example 2.
We consider the system (1) whose communication topology is described by Figure 2a. We can easily see that the signed graph is structurally balanced and all nodes can be divided into two groups: and . The Laplacian matrix of is given by
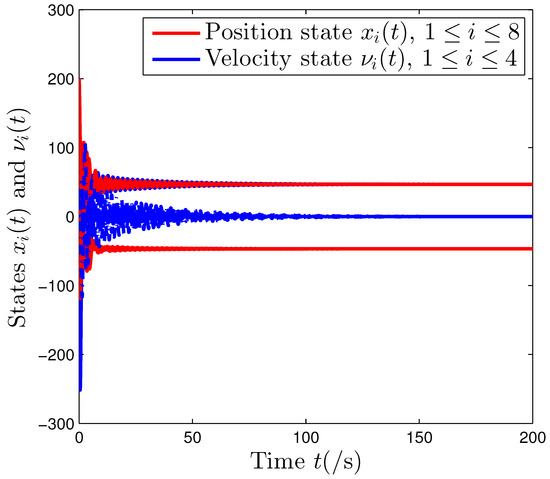
Applying the distributed control protocol (2) to the system (1), the state evolutions of eight agents are shown in Figure 3.
Figure 3.
State evolutions of the system (1) under the signed graph .
From Figure 3, it can be seen that the position states of the eight agents (as indicated by the red lines) can achieve the bipartite consensus, and the velocity states of four agents (as indicated by the blue lines) with second-order integrator dynamics eventually converge to zero. This indicates that, under the distributed control algorithm (2), the system (1) can achieve the goal of static bipartite consensus, which validates the correctness of the results of Theorem 1.
Example 3.
For the system (1) under the signed graph in Figure 2b, let the distributed control protocol (2) be employed. It can be easily seen that the signed graph is structurally unbalanced based on the definition of structural balance. The Laplacian matrix of is given by
The evolution of the states of all eight agents is shown in Figure 4.
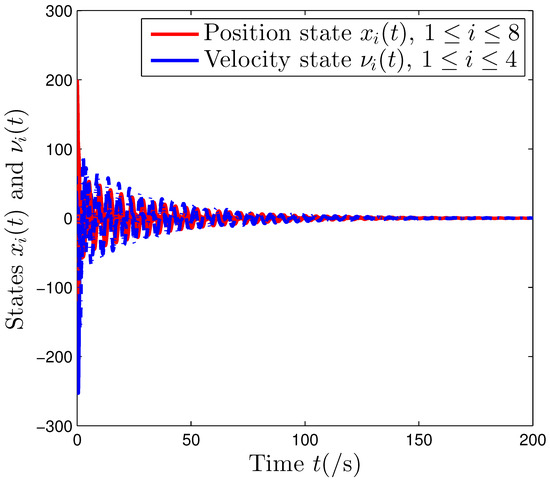
Figure 4.
State evolutions of the system (1) under the signed graph .
From Figure 4, it can be observed that when the communication topology is structurally unbalanced, the positional states of eight agents (as indicated by the red lines) and the velocity states of four agents (as indicated by the blue lines) eventually converge to zero under the control of the distributed protocol (2), which denotes that the system (1) can reach the state stability. Hence, these derived results satisfy Theorem 1.
6. Conclusions
In this paper, we have studied the distributed control problems of heterogeneous signed networks under undirected communication topologies, in which both first-order integrators and second-order integrators are considered. We have designed a distributed control protocol based on only position information. With this protocol being employed, we have developed the convergence results of signed networks. It is shown that the signed network can achieve the static bipartite consensus (respectively, state stability) if and only if the signed undirected graph is structurally balanced (respectively, unbalanced). In addition, we have given two examples to verify the correctness of our derived results.
In our future work, we aim to explore the distributed control problems of heterogeneous signed networks under directed topologies, in addition to those with communication delays and external disturbances.
Author Contributions
Conceptualization, Y.M. and Y.Z.; methodology, J.L. and M.D.; software, Y.M. and P.J.; validation, Y.M., Y.Z., J.L. and M.D.; formal analysis, Y.Z. and J.L.; investigation, Y.M., M.D. and P.J.; resources, Y.M. and M.D.; writing—original draft preparation, Y.M., Y.Z. and J.L.; writing—review and editing, M.D. and P.J.; visualization, Y.M. and Y.Z.; supervision, M.D.; project administration, Y.M., Y.Z. and M.D.; funding acquisition, M.D. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Natural Science Foundation of China under Grant 62103210, in part by Youth Innovation Science and Technology Support Plan of Colleges in Shandong Province under Grant 2021KJ025, in part by the Fundamental Research Funds for the Qilu University of Technology under Grant 2022PY003, and in part by the Undergraduate University Teachers Visiting Research Funds for Shandong Province.
Data Availability Statement
Data are contained within the article.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Olfati-Saber, R.; Murray, R.M. Consensus problems in networks of agents with switching topology and time-delays. IEEE Trans. Autom. Control 2004, 49, 1520–1533. [Google Scholar] [CrossRef]
- Yu, W.; Chen, G.; Cao, M. Some necessary and sufficient conditions for second-order consensus in multi-agent dynamical systems. Automatica 2010, 46, 1089–1095. [Google Scholar] [CrossRef]
- Yu, W.; Chen, G.; Ren, W.; Kurths, J.; Zheng, W.X. Distributed higher order consensus protocols in multiagent dynamical systems. IEEE Trans. Circuits Syst. I Regul. Pap. 2011, 58, 1924–1932. [Google Scholar] [CrossRef]
- Li, Z.; Duan, Z.; Chen, G.; Huang, L. Consensus of multiagent systems and synchronization of complex networks: A unified viewpoint. IEEE Trans. Circuits Syst. I Regul. Pap. 2010, 57, 213–224. [Google Scholar]
- Doostmohammadian, M. Single-bit consensus with finite-time convergence: Theory and applications. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 3332–3338. [Google Scholar] [CrossRef]
- Cecilio, J.; Furtado, P. Wireless Sensors in Heterogeneous Networked Systems; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Chinnasamy, P.; Vinodhini, B.; Praveena, V.; Vinothini, C.; Ben Sujitha, B. Blockchain based access control and data sharing systems for smart devices. J. Phys. Conf. Ser. 2021, 1767, 012056. [Google Scholar] [CrossRef]
- Zheng, Y.; Zhu, Y.; Wang, L. Consensus of heterogeneous multi-agent systems. IET Control Theory Appl. 2011, 5, 1881–1888. [Google Scholar] [CrossRef]
- Wen, G.; Huang, J.; Wang, C.; Chen, Z.; Peng, Z. Group consensus control for heterogeneous multi-agent systems with fixed and switching topologies. Int. J. Control 2016, 89, 259–269. [Google Scholar] [CrossRef]
- Zheng, Y.; Wang, L. Containment control of heterogeneous multi-agent systems. Int. J. Control 2014, 87, 1–8. [Google Scholar] [CrossRef]
- Li, X.; Yu, Z.; Zhong, Z.; Wu, N.; Li, Z. Finite-time group consensus via pinning control for heterogeneous multi-agent systems with disturbances by integral sliding mode. J. Frankl. Inst. 2022, 359, 9618–9635. [Google Scholar] [CrossRef]
- Du, H.; Wen, G.; Wu, D.; Cheng, Y.; Lu, J. Distributed fixed-time consensus for nonlinear heterogeneous multi-agent systems. Automatica 2020, 113, 108797. [Google Scholar] [CrossRef]
- Liu, X.; Wang, L.; Cao, J. Further results on fixed-time leader-following consensus of heterogeneous multiagent systems with external disturbances. IEEE Trans. Circuits Syst. II Express Briefs 2023, 70, 2894–2898. [Google Scholar] [CrossRef]
- Ke, J.; Zeng, J.; Duan, Z. Observer-based prescribed-time consensus control for heterogeneous multi-agent systems under directed graphs. Int. J. Robust Nonlinear Control 2023, 33, 872–898. [Google Scholar] [CrossRef]
- Yaghmaie, F.A.; Lewis, F.L.; Su, R. Output regulation of linear heterogeneous multi-agent systems via output and state feedback. Automatica 2016, 67, 157–164. [Google Scholar] [CrossRef]
- Zuo, S.; Song, Y.; Lewis, F.L.; Davoudi, A. Output containment control of linear heterogeneous multi-agent systems using internal model principle. IEEE Trans. Cybern. 2017, 47, 2099–2109. [Google Scholar] [CrossRef] [PubMed]
- Huang, C.; Ye, X. Cooperative output regulation of heterogeneous multi-agent systems: An criterion. IEEE Trans. Autom. Control 2014, 59, 267–273. [Google Scholar] [CrossRef]
- Han, T.; Guan, Z.H.; Xiao, B.; Wu, J.; Chen, X. Distributed output consensus of heterogeneous multi-agent systems via an output regulation approach. Neurocomputing 2019, 360, 131–137. [Google Scholar] [CrossRef]
- Guo, H.; Meng, M.; Feng, G. Lyapunov-based output containment control of heterogeneous multi-agent systems with Markovian switching topologies and distributed delays. IEEE CAA J. Autom. Sin. 2023, 10, 1421–1433. [Google Scholar] [CrossRef]
- Wu, Y.; Hu, J.; Xiang, L.; Shi, K.; Liang, Q. Finite-time output regulation of linear heterogeneous multi-gent systems using smooth control. IEEE Trans. Circuits Syst. II Express Briefs 2023, 70, 2894–2898. [Google Scholar]
- Chen, C.; Han, Y.; Zhu, S.; Zeng, Z. Prescribed-time cooperative output regulation of heterogeneous multiagent systems. IEEE Trans. Ind. Inform. 2024, 20, 2432–2443. [Google Scholar] [CrossRef]
- Tian, L.; Guan, Y.; Wang, L. Controllability and observability of multi-agent systems with heterogeneous and switching topologies. Int. J. Control 2020, 93, 437–448. [Google Scholar] [CrossRef]
- Altafini, C. Consensus problems on networks with antagonistic interactions. IEEE Trans. Autom. Control 2013, 58, 935–946. [Google Scholar] [CrossRef]
- Valcher, M.E.; Misra, P. On the consensus and bipartite consensus in high-order multi-agent dynamical systems with antagonistic interactions. Syst. Control Lett. 2014, 66, 94–103. [Google Scholar] [CrossRef]
- Qin, J.H.; Fu, W.M.; Zheng, W.X.; Gao, H. On the bipartite consensus for generic linear multiagent systems with input saturation. IEEE Trans. Cybern. 2017, 47, 1948–1958. [Google Scholar] [CrossRef]
- Hu, J.; Wu, Y.Z.; Li, T.; Ghosh, B.K. Consensus control of general linear multiagent systems with antagonistic interactions and communication noises. IEEE Trans. Autom. Control 2019, 64, 2122–2127. [Google Scholar] [CrossRef]
- Zhang, H.W.; Chen, J. Bipartite consensus of multi-agent systems over signed graphs: State feedback and output feedback control approaches. Int. J. Robust Nonlinear Control 2017, 27, 3–14. [Google Scholar] [CrossRef]
- Song, Q.; Lu, G.P.; Wen, G.H.; Cao, J.; Liu, F. Bipartite synchronization and convergence analysis for network of harmonic oscillator systems with signed graph and time delay. IEEE Trans. Circuits Syst. I Regular Pap. 2019, 66, 2723–2734. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).