
Hermitian Solutions of the Quaternion Algebraic Riccati Equations through Zeroing Neural Networks with Application to Quadrotor Control

 ,
,  ,
,  ,
, 
 and
and 
Abstract
:1. Introduction
- A novel ZNN model, termed ’ZQ-ARE’, for solving the TQARE by identifying only Hermitian solutions is introduced.
- A theoretical analysis is carried out in order to validate the ZQ-ARE model.
- Sim tests and a real-world application to quadrotor control are carried out to supplement the theoretical study.
- For the task of stabilizing the flight control system of a quadrotor, a comparison is given between the solution adaptations provided by the traditional DARE, the ZQ-ARE, and the SDRE methods.
2. Preliminaries and Reformulation of the TQARE
3. ZNN Modification for the TQARE System
| Algorithm 1 Calculation of matrix R |
| Require: The order n of the square matrix . |
|
| Ensure: The matrix R. |
| Algorithm 2 Calculation of matrix Z |
| Require: The order n of the square matrix . |
|
| Ensure: The matrix Z. |
4. Convergence and Stability Analysis
5. Simulations and Application
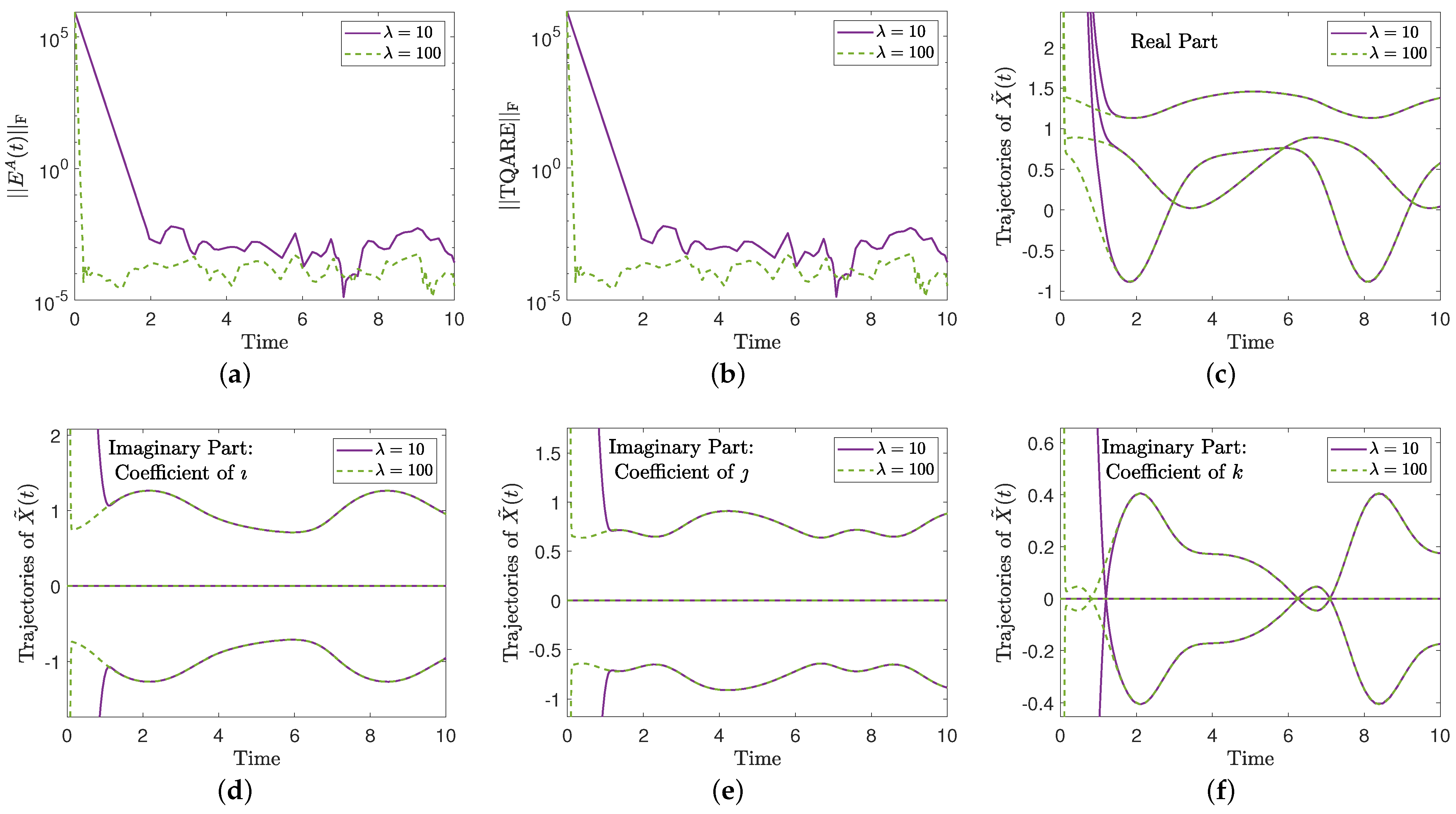
5.1. Walkthrough Tests
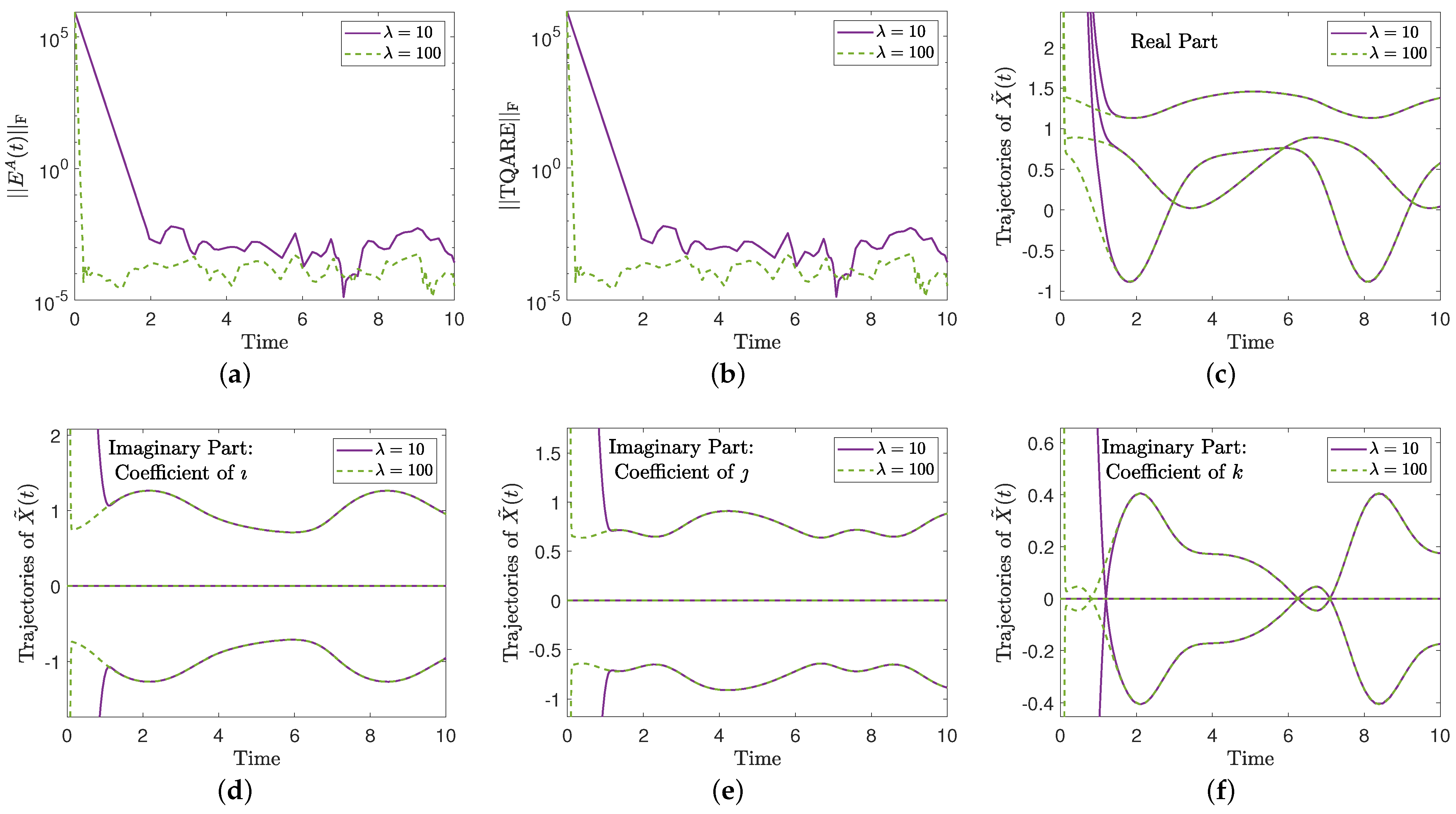
5.1.1. Example 1
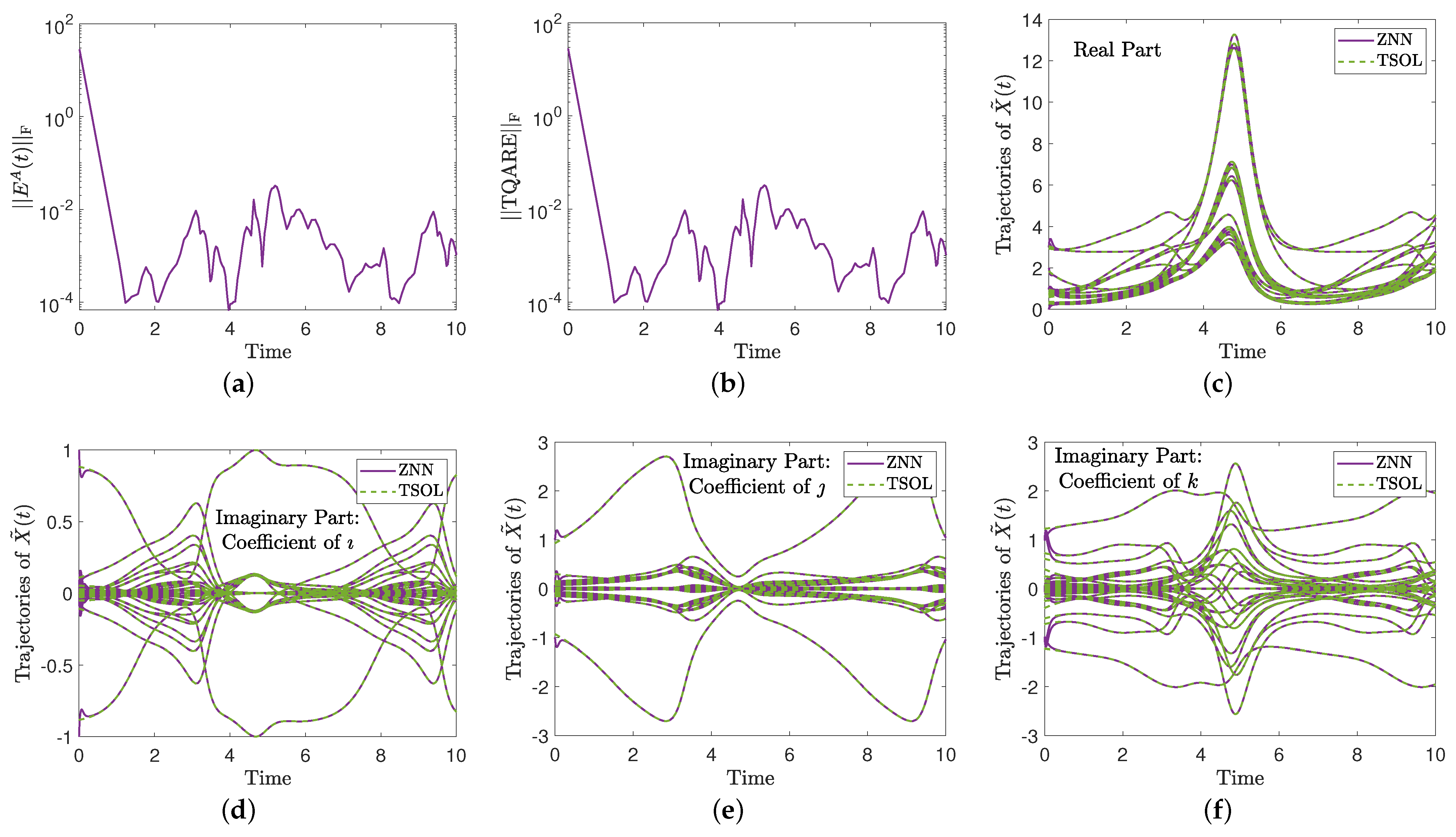
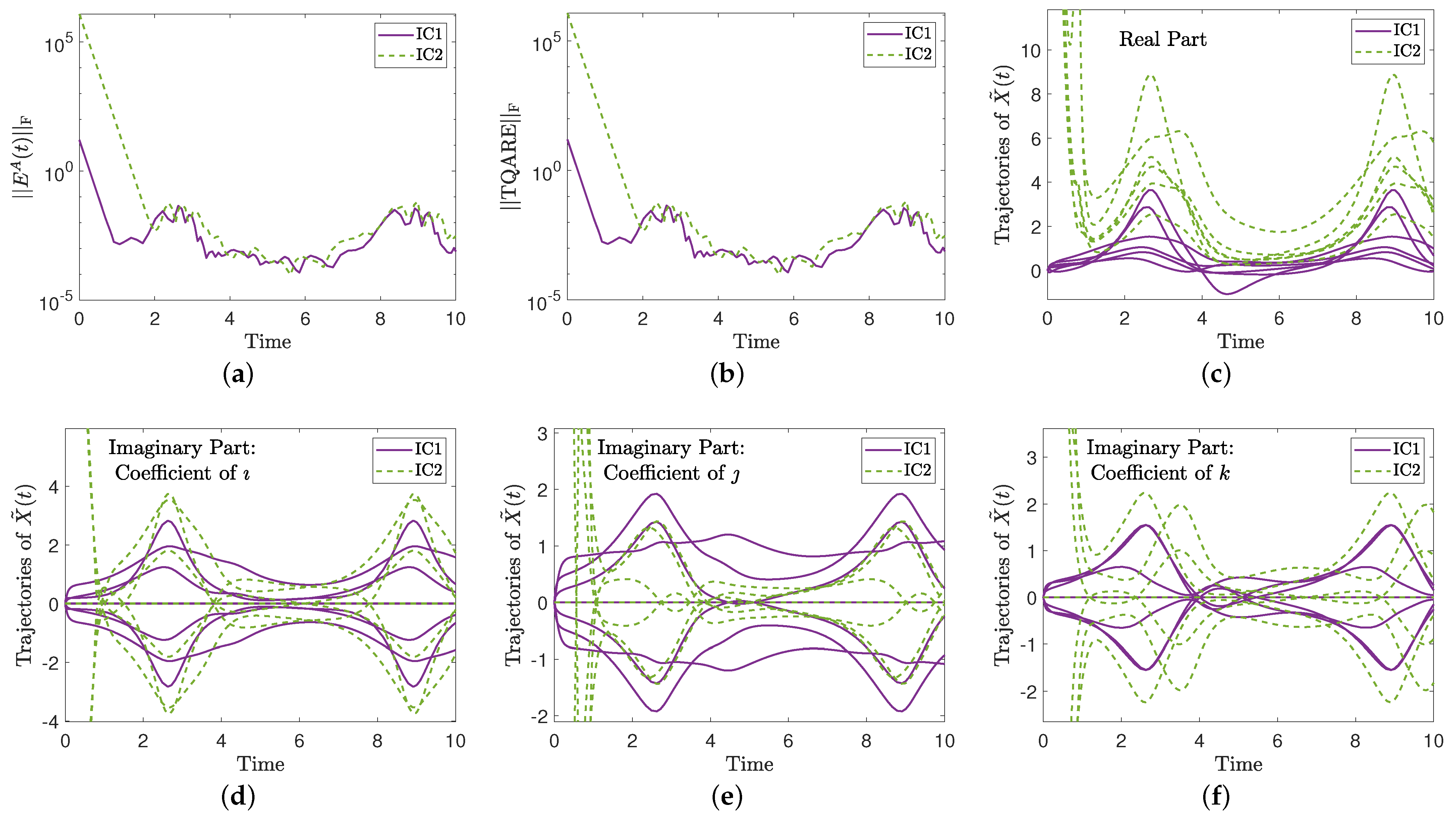
5.1.2. Example 2
- IC1: ;
- IC2: .
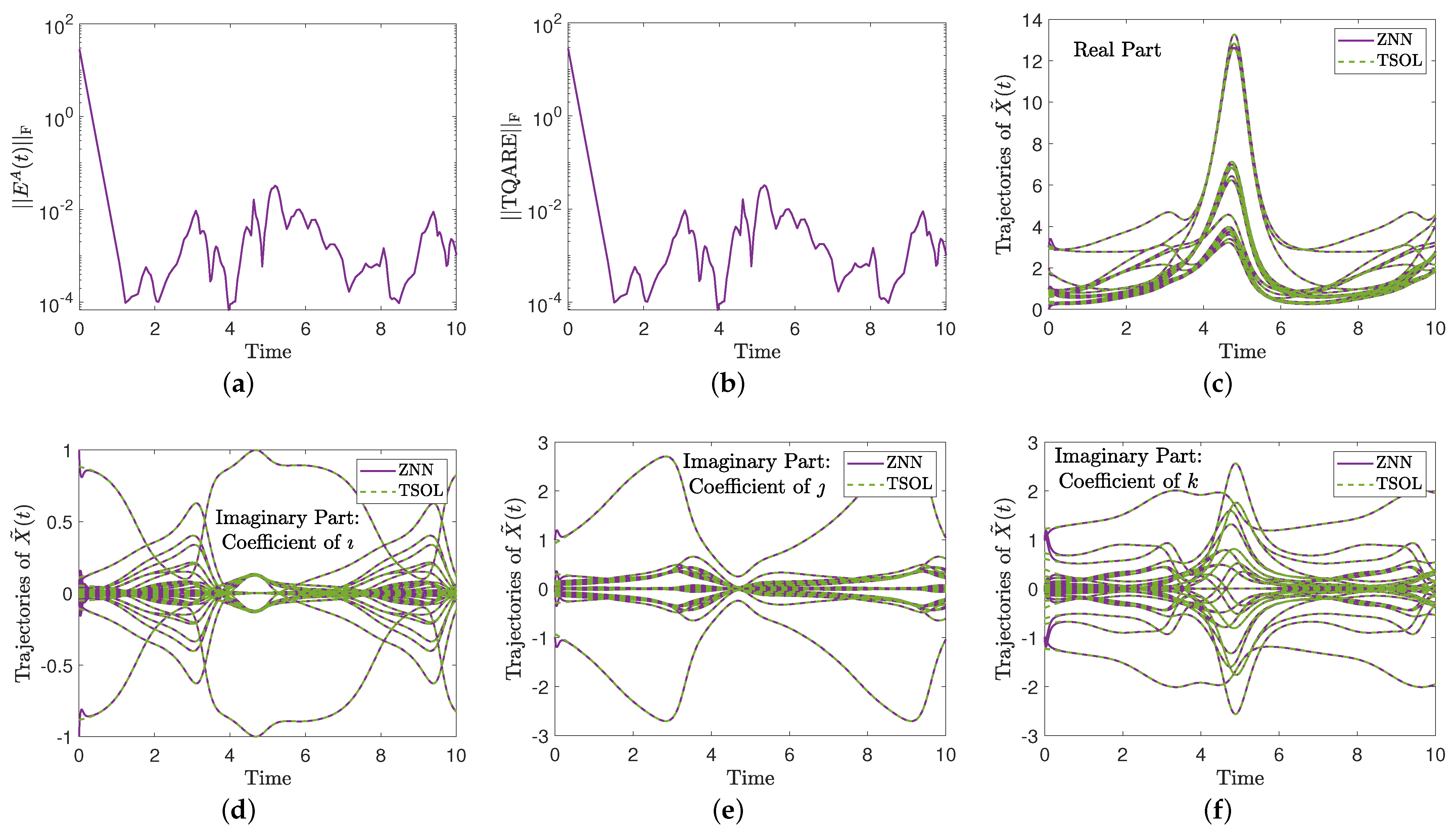
5.1.3. Example 3
5.2. Discussion of the SE Findings
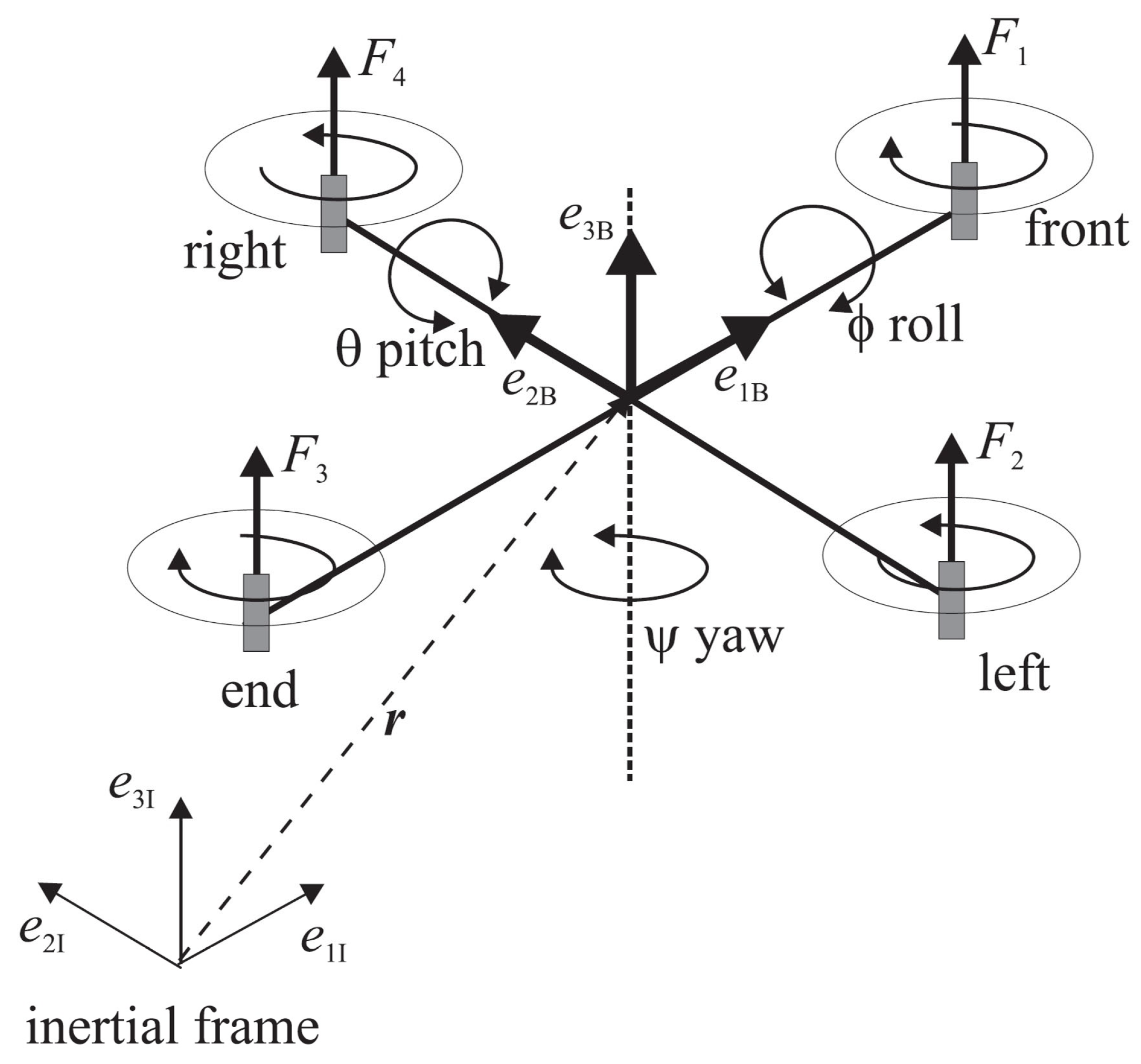
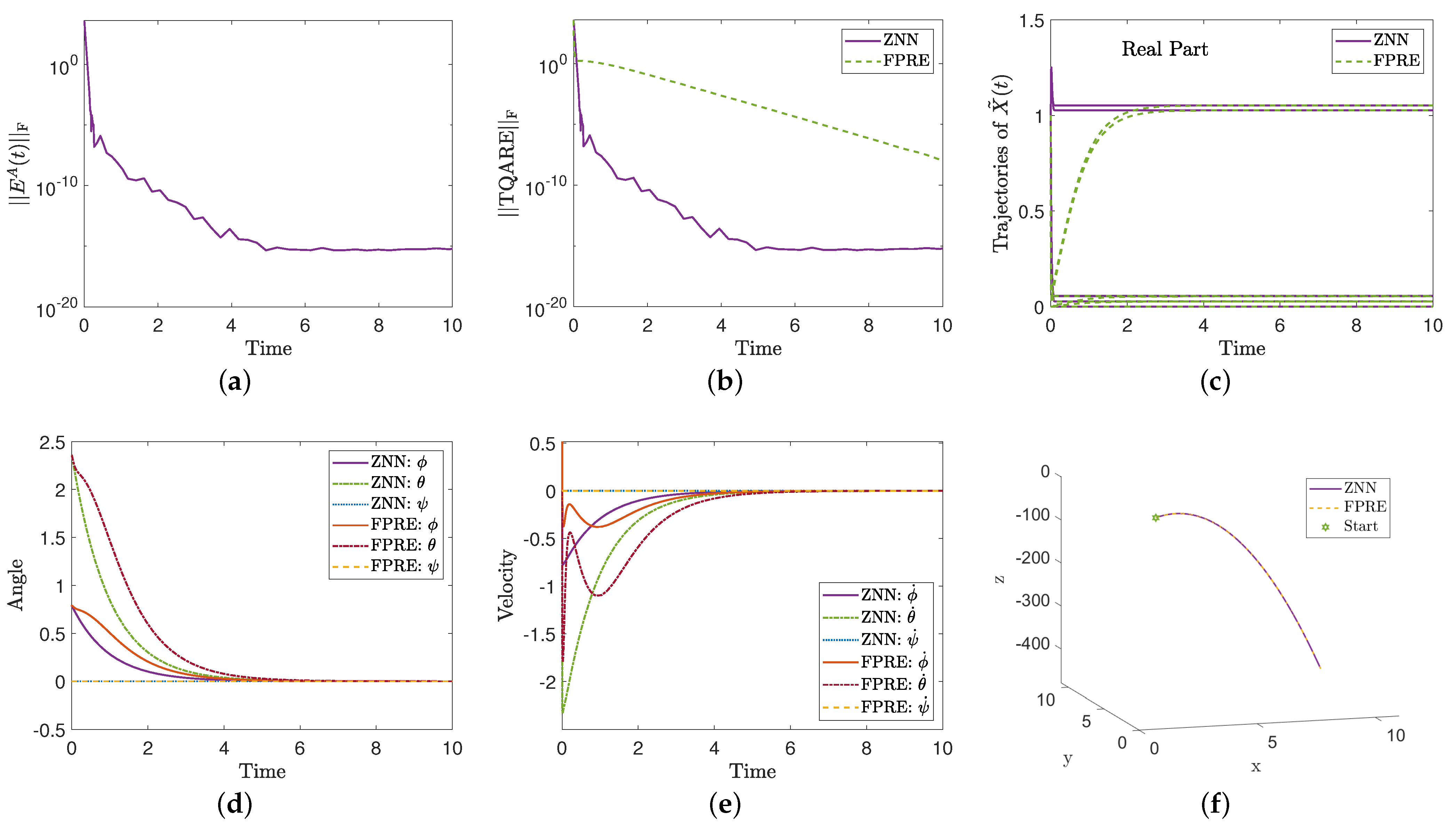
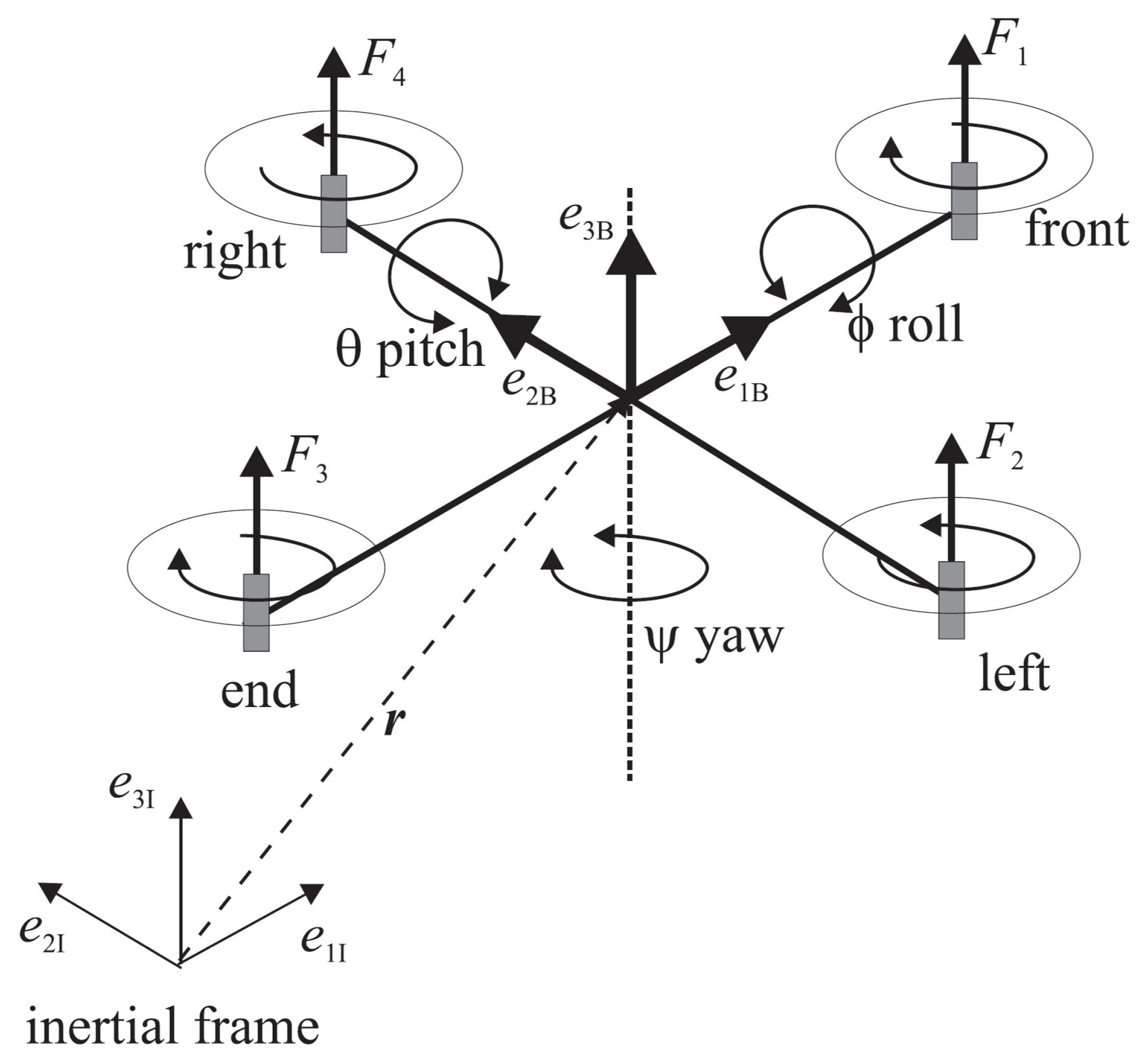
5.3. Application to Quadrotor Control
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kalman, R.E. Contributions to the theory of optimal control. Bol. Soc. Mat. Mex. 1960, 5, 102–119. [Google Scholar]
- Qin, B.; Sun, H.; Ma, J.; Li, W.; Ding, T.; Wang, Z.; Zomaya, A.Y. Robust H∞ control of doubly fed wind generator via state-dependent Riccati equation technique. IEEE Trans. Power Syst. 2019, 34, 2390–2400. [Google Scholar] [CrossRef]
- Dong, X.; Hu, G. Time-varying formation tracking for linear multiagent systems with multiple leaders. IEEE Trans. Autom. Control 2017, 62, 3658–3664. [Google Scholar] [CrossRef]
- Rigatos, G.; Busawon, K.; Pomares, J.; Abbaszadeh, M. Nonlinear optimal control for the wheeled inverted pendulum system. Robotica 2020, 38, 29–47. [Google Scholar] [CrossRef]
- Laub, A. A Schur method for solving algebraic Riccati equations. IEEE Trans. Autom. Control. 1979, 24, 913–921. [Google Scholar] [CrossRef]
- Aguilar, L.T.; Orlov, Y.; Acho, L. Nonlinear H∞-control of nonsmooth time-varying systems with application to friction mechanical manipulators. Automatica 2003, 39, 1531–1542. [Google Scholar] [CrossRef]
- Mohammadi, H.; Zare, A.; Soltanolkotabi, M.; Jovanović, M.R. Convergence and sample complexity of gradient methods for the model-free linear-quadratic regulator problem. IEEE Trans. Autom. Control. 2022, 67, 2435–2450. [Google Scholar] [CrossRef]
- Hambly, B.; Xu, R.; Yang, H. Policy gradient methods for the noisy linear quadratic regulator over a finite horizon. SIAM J. Control Optim. 2021, 59, 3359–3391. [Google Scholar] [CrossRef]
- Hossain, M.; Haque, M.E.; Arif, M.T. Kalman filtering techniques for the online model parameters and state of charge estimation of the Li-ion batteries: A comparative analysis. J. Energy Storage 2022, 51, 104174. [Google Scholar] [CrossRef]
- Hamidi, F.; Jerbi, H.; Alharbi, H.; Leiva, V.; Popescu, D.; Rajhi, W. Metaheuristic solution for stability analysis of nonlinear systems using an intelligent algorithm with potential applications. Fractal Fract. 2023, 7, 78. [Google Scholar] [CrossRef]
- Kchaou, M.; Regaieg, M.A.; Jerbi, H.; Abbassi, R.; Stefanoiu, D.; Popescu, D. Admissible control for non-linear singular systems subject to time-varying delay and actuator saturation: An interval type-2 fuzzy approach. Actuators 2023, 12, 30. [Google Scholar] [CrossRef]
- Oshman, Y.; Bar-Itzhack, I. Eigenfactor solution of the matrix Riccati equation—A continuous square root algorithm. IEEE Trans. Autom. Control. 1985, 30, 971–978. [Google Scholar] [CrossRef]
- Dooren, P.V. A generalized eigenvalue approach for solving Riccati equations. SIAM J. Sci. Stat. Comput. 1981, 2, 121–135. [Google Scholar] [CrossRef]
- Zhang, F. Quaternions and matrices of quaternions. Linear Algebra Its Appl. 1997, 251, 21–57. [Google Scholar] [CrossRef]
- Rodman, L. Topics in Quaternion Linear Algebra; Princeton Series in Applied Mathematics; Princeton University Press: Princeton, NJ, USA, 2014. [Google Scholar] [CrossRef]
- Hamilton, W.R. On a new species of imaginary quantities, connected with the theory of quaternions. Proc. R. Ir. Acad. 1840, 2, 424–434. [Google Scholar]
- Joldeş, M.; Muller, J.M. Algorithms for manipulating quaternions in floating-point arithmetic. In Proceedings of the 2020 IEEE 27th Symposium on Computer Arithmetic (ARITH), Portland, OR, USA, 7–10 June 2020; pp. 48–55. [Google Scholar]
- Szynal-Liana, A.; Włoch, I. Generalized commutative quaternions of the Fibonacci type. Bol. Soc. Mat. Mex. 2022, 28, 1. [Google Scholar] [CrossRef]
- Pavllo, D.; Feichtenhofer, C.; Auli, M.; Grangier, D. Modeling human motion with quaternion-based neural networks. Int. J. Comput. Vis. 2020, 128, 855–872. [Google Scholar] [CrossRef]
- Giardino, S. Quaternionic quantum mechanics in real Hilbert space. J. Geom. Phys. 2020, 158, 103956. [Google Scholar] [CrossRef]
- Goodyear, A.M.S.; Singla, P.; Spencer, D.B. Analytical state transition matrix for dual-quaternions for spacecraft pose estimation. In Proceedings of the AAS/AIAA Astrodynamics Specialist Conference, Maui, HI, USA, 13–17 January 2019; Univelt Inc.: Escondido, CA, USA, 2020; pp. 393–411. [Google Scholar]
- Kansu, M.E. Quaternionic representation of electromagnetism for material media. Int. J. Geom. Methods Mod. Phys. 2019, 16, 1950105. [Google Scholar] [CrossRef]
- Özgür, E.; Mezouar, Y. Kinematic modeling and control of a robot arm using unit dual quaternions. Robot. Auton. Syst. 2016, 77, 66–73. [Google Scholar] [CrossRef]
- Xiao, L.; Zhang, Y.; Huang, W.; Jia, L.; Gao, X. A dynamic parameter noise-tolerant zeroing neural network for time-varying quaternion matrix equation with applications. IEEE Trans. Neural Netw. Learn. Syst. 2022, 1–10. [Google Scholar] [CrossRef]
- Kovalnogov, V.N.; Fedorov, R.V.; Demidov, D.A.; Malyoshina, M.A.; Simos, T.E.; Mourtas, S.D.; Katsikis, V.N. Computing quaternion matrix pseudoinverse with zeroing neural networks. AIMS Math. 2023, 8, 22875–22895. [Google Scholar] [CrossRef]
- Xiao, L.; Cao, P.; Song, W.; Luo, L.; Tang, W. A fixed-time noise-tolerance ZNN model for time-variant inequality-constrained quaternion matrix least-squares problem. IEEE Trans. Neural Netw. Learn. Syst. 2023, 1–10. [Google Scholar] [CrossRef]
- Xiao, L.; Liu, S.; Wang, X.; He, Y.; Jia, L.; Xu, Y. Zeroing neural networks for dynamic quaternion-valued matrix inversion. IEEE Trans. Ind. Inform. 2022, 18, 1562–1571. [Google Scholar] [CrossRef]
- Aoun, S.B.; Derbel, N.; Jerbi, H.; Simos, T.E.; Mourtas, S.D.; Katsikis, V.N. A quaternion Sylvester equation solver through noise-resilient zeroing neural networks with application to control the SFM chaotic system. AIMS Math. 2023, 8, 27376–27395. [Google Scholar] [CrossRef]
- Tan, N.; Yu, P.; Ni, F. New varying-parameter recursive neural networks for model-free kinematic control of redundant manipulators with limited measurements. IEEE Trans. Instrum. Meas. 2022, 71, 1–14. [Google Scholar] [CrossRef]
- Abbassi, R.; Jerbi, H.; Kchaou, M.; Simos, T.E.; Mourtas, S.D.; Katsikis, V.N. Towards higher-order zeroing neural networks for calculating quaternion matrix inverse with application to robotic motion tracking. Mathematics 2023, 11, 2756. [Google Scholar] [CrossRef]
- Kovalnogov, V.N.; Fedorov, R.V.; Demidov, D.A.; Malyoshina, M.A.; Simos, T.E.; Katsikis, V.N.; Mourtas, S.D.; Sahas, R.D. Zeroing neural networks for computing quaternion linear matrix equation with application to color restoration of images. AIMS Math. 2023, 8, 14321–14339. [Google Scholar] [CrossRef]
- Kovalnogov, V.N.; Fedorov, R.V.; Shepelev, I.I.; Sherkunov, V.V.; Simos, T.E.; Mourtas, S.D.; Katsikis, V.N. A novel quaternion linear matrix equation solver through zeroing neural networks with applications to acoustic source tracking. AIMS Math. 2023, 8, 25966–25989. [Google Scholar] [CrossRef]
- Zhang, Y.; Ge, S.S. Design and analysis of a general recurrent neural network model for time-varying matrix inversion. IEEE Trans. Neural Netw. 2005, 16, 1477–1490. [Google Scholar] [CrossRef]
- Chai, Y.; Li, H.; Qiao, D.; Qin, S.; Feng, J. A neural network for Moore-Penrose inverse of time-varying complex-valued matrices. Int. J. Comput. Intell. Syst. 2020, 13, 663–671. [Google Scholar] [CrossRef]
- Wu, W.; Zheng, B. Improved recurrent neural networks for solving Moore-Penrose inverse of real-time full-rank matrix. Neurocomputing 2020, 418, 221–231. [Google Scholar] [CrossRef]
- Jiang, W.; Lin, C.L.; Katsikis, V.N.; Mourtas, S.D.; Stanimirović, P.S.; Simos, T.E. Zeroing neural network approaches based on direct and indirect methods for solving the Yang–Baxter-like matrix equation. Mathematics 2022, 10, 1950. [Google Scholar] [CrossRef]
- Jerbi, H.; Alharbi, H.; Omri, M.; Ladhar, L.; Simos, T.E.; Mourtas, S.D.; Katsikis, V.N. Towards higher-order zeroing neural network dynamics for solving time-varying algebraic Riccati equations. Mathematics 2022, 10, 4490. [Google Scholar] [CrossRef]
- Katsikis, V.N.; Stanimirović, P.S.; Mourtas, S.D.; Xiao, L.; Karabasević, D.; Stanujkić, D. Zeroing neural network with fuzzy parameter for computing pseudoinverse of arbitrary matrix. IEEE Trans. Fuzzy Syst. 2022, 30, 3426–3435. [Google Scholar] [CrossRef]
- Alharbi, H.; Jerbi, H.; Kchaou, M.; Abbassi, R.; Simos, T.E.; Mourtas, S.D.; Katsikis, V.N. Time-varying pseudoinversion based on full-rank decomposition and zeroing neural networks. Mathematics 2023, 11, 600. [Google Scholar] [CrossRef]
- Mourtas, S.D.; Katsikis, V.N. Exploiting the Black-Litterman framework through error-correction neural networks. Neurocomputing 2022, 498, 43–58. [Google Scholar] [CrossRef]
- Kovalnogov, V.N.; Fedorov, R.V.; Generalov, D.A.; Chukalin, A.V.; Katsikis, V.N.; Mourtas, S.D.; Simos, T.E. Portfolio insurance through error-correction neural networks. Mathematics 2022, 10, 3335. [Google Scholar] [CrossRef]
- Mourtas, S.D.; Kasimis, C. Exploiting mean-variance portfolio optimization problems through zeroing neural networks. Mathematics 2022, 10, 3079. [Google Scholar] [CrossRef]
- Qiao, S.; Wei, Y.; Zhang, X. Computing time-varying ML-weighted pseudoinverse by the Zhang neural networks. Numer. Funct. Anal. Optim. 2020, 41, 1672–1693. [Google Scholar] [CrossRef]
- Wang, X.; Stanimirovic, P.S.; Wei, Y. Complex ZFs for computing time-varying complex outer inverses. Neurocomputing 2018, 275, 983–1001. [Google Scholar] [CrossRef]
- Dai, J.; Tan, P.; Yang, X.; Xiao, L.; Jia, L.; He, Y. A fuzzy adaptive zeroing neural network with superior finite-time convergence for solving time-variant linear matrix equations. Knowl.-Based Syst. 2022, 242, 108405. [Google Scholar] [CrossRef]
- Groß, J.; Trenkler, G.; Troschke, S.O. Quaternions: Further contributions to a matrix oriented approach. Linear Algebra Its Appl. 2001, 326, 205–213. [Google Scholar] [CrossRef]
- Gupta, A.K. Numerical Methods Using MATLAB; MATLAB Solutions Series; Apress: Berkeley, CA, USA; New York, NY, USA, 2014. [Google Scholar]
- Simos, T.E.; Katsikis, V.N.; Mourtas, S.D.; Stanimirović, P.S. Unique non-negative definite solution of the time-varying algebraic Riccati equations with applications to stabilization of LTV systems. Math. Comput. Simul. 2022, 202, 164–180. [Google Scholar] [CrossRef]
- Carino, J.; Abaunza, H.; Castillo, P. Quadrotor quaternion control. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; IEEE: Denver, CO, USA, 2015. [Google Scholar] [CrossRef]
- Fresk, E.; Nikolakopoulos, G. Experimental evaluation of a full quaternion based attitude quadrotor controller. In Proceedings of the 2015 IEEE 20th Conference on Emerging Technologies & Factory Automation (ETFA), Luxembourg, 8–11 September 2015; IEEE: Luxembourg, 2015. [Google Scholar] [CrossRef]
- Chen, Y.; Perez-Arancibia, N.O. Adaptive control of aerobatic quadrotor maneuvers in the presence of propeller-aerodynamic-coefficient and torque-latency time-variations. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; IEEE: Montreal, QC, Canada, 2019. [Google Scholar] [CrossRef]
- Nekoo, S.R.; Acosta, J.Á.; Ollero, A. Quaternion-based state-dependent differential Riccati equation for quadrotor drones: Regulation control problem in aerobatic flight. Robotica 2022, 40, 3120–3135. [Google Scholar] [CrossRef]
- Liang, T.; Yang, K.; Han, Q.; Li, C.; Li, J.; Deng, Q.; Chen, S.; Tuo, X. Attitude estimation of quadrotor UAV based on QUKF. IEEE Access 2023, 11, 111133–111141. [Google Scholar] [CrossRef]
- Li, J.; Chen, P.; Chang, Z.; Zhang, G.; Guo, L.; Zhao, C. Trajectory tracking control of quadrotor based on fractional-order s-plane model. Machines 2023, 11, 672. [Google Scholar] [CrossRef]
- Stepień, S.; Superczyńska, P. Modified infinite-time state-dependent Riccati equation method for nonlinear affine systems: Quadrotor control. Appl. Sci. 2021, 11, 10714. [Google Scholar] [CrossRef]
- Voos, H. Nonlinear state-dependent Riccati equation control of a quadrotor UAV. In Proceedings of the 2006 IEEE Conference on Computer Aided Control System Design, 2006 IEEE International Conference on Control Applications, 2006 IEEE International Symposium on Intelligent Control, Munich, Germany, 4–6 October 2006; IEEE: Munich, Germany, 2006. [Google Scholar] [CrossRef]
- Tan, S.; Zhong, W. Numerical solutions of linear quadratic control for time-varying systems via symplectic conservative perturbation. Appl. Math. Mech. 2007, 28, 277–287. [Google Scholar] [CrossRef]
- Weiss, A.; Kolmanovsky, I.; Bernstein, D.S. Forward-integration Riccati-based output-feedback control of linear time-varying systems. In Proceedings of the 2012 American Control Conference (ACC), Montreal, QC, Canada, 27–29 June 2012; pp. 6708–6714. [Google Scholar]
- Mracek, C.P.; Cloutier, J.R. Control designs for the nonlinear benchmark problem via the state-dependent Riccati equation method. Int. J. Robust Nonlinear Control 1998, 8, 401–433. [Google Scholar] [CrossRef]
- Erdem, E.B.; Alleyne, A.G. Design of a class of nonlinear controllers via state dependent Riccati equations. IEEE Trans. Control. Syst. Technol. 2004, 12, 133–137. [Google Scholar] [CrossRef]
- Prach, A.; Tekinalp, O.; Bernstein, D.S. A numerical comparison of frozen-time and forward-propagating Riccati equations for stabilization of periodically time-varying systems. In Proceedings of the American Control Conference, Portland, OR, USA, 4–6 June 2014; pp. 5633–5638. [Google Scholar]
- Simos, T.E.; Katsikis, V.N.; Mourtas, S.D.; Stanimirović, P.S. Solving time-varying nonsymmetric algebraic Riccati equations with zeroing neural dynamics. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 6575–6587. [Google Scholar] [CrossRef]
- He, W.; Luo, T.; Tang, Y.; Du, W.; Tian, Y.; Qian, F. Secure communication based on quantized synchronization of chaotic neural networks under an event-triggered strategy. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 3334–3345. [Google Scholar] [CrossRef] [PubMed]
- Su, H.; Luo, R.; Huang, M.; Fu, J. Robust fixed time control of a class of chaotic systems with bounded uncertainties and disturbances. Int. J. Control Autom. Syst. 2022, 20, 813–822. [Google Scholar] [CrossRef]
- Singer, J.; Wang, Y.; Bau, H.H. Controlling a chaotic system. Phys. Rev. Lett. 1991, 66, 1123. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| m | 0.5 | kg |
| g | 9.81 | m/s |
| l | 0.3 | m |
| 0.01 | N | |
| 0.0081 | kg·m | |
| 0.0081 | kg·m | |
| 0.0162 | kg·m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jerbi, H.; Alshammari, O.; Aoun, S.B.; Kchaou, M.; Simos, T.E.; Mourtas, S.D.; Katsikis, V.N. Hermitian Solutions of the Quaternion Algebraic Riccati Equations through Zeroing Neural Networks with Application to Quadrotor Control. Mathematics 2024, 12, 15. https://doi.org/10.3390/math12010015
Jerbi H, Alshammari O, Aoun SB, Kchaou M, Simos TE, Mourtas SD, Katsikis VN. Hermitian Solutions of the Quaternion Algebraic Riccati Equations through Zeroing Neural Networks with Application to Quadrotor Control. Mathematics. 2024; 12(1):15. https://doi.org/10.3390/math12010015
Chicago/Turabian StyleJerbi, Houssem, Obaid Alshammari, Sondess Ben Aoun, Mourad Kchaou, Theodore E. Simos, Spyridon D. Mourtas, and Vasilios N. Katsikis. 2024. "Hermitian Solutions of the Quaternion Algebraic Riccati Equations through Zeroing Neural Networks with Application to Quadrotor Control" Mathematics 12, no. 1: 15. https://doi.org/10.3390/math12010015
APA StyleJerbi, H., Alshammari, O., Aoun, S. B., Kchaou, M., Simos, T. E., Mourtas, S. D., & Katsikis, V. N. (2024). Hermitian Solutions of the Quaternion Algebraic Riccati Equations through Zeroing Neural Networks with Application to Quadrotor Control. Mathematics, 12(1), 15. https://doi.org/10.3390/math12010015