

A Coupled Machine Learning and Lattice Boltzmann Method Approach for Immiscible Two-Phase Flows

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Method
2.1. Governing Equations of the Front-Tracking Method
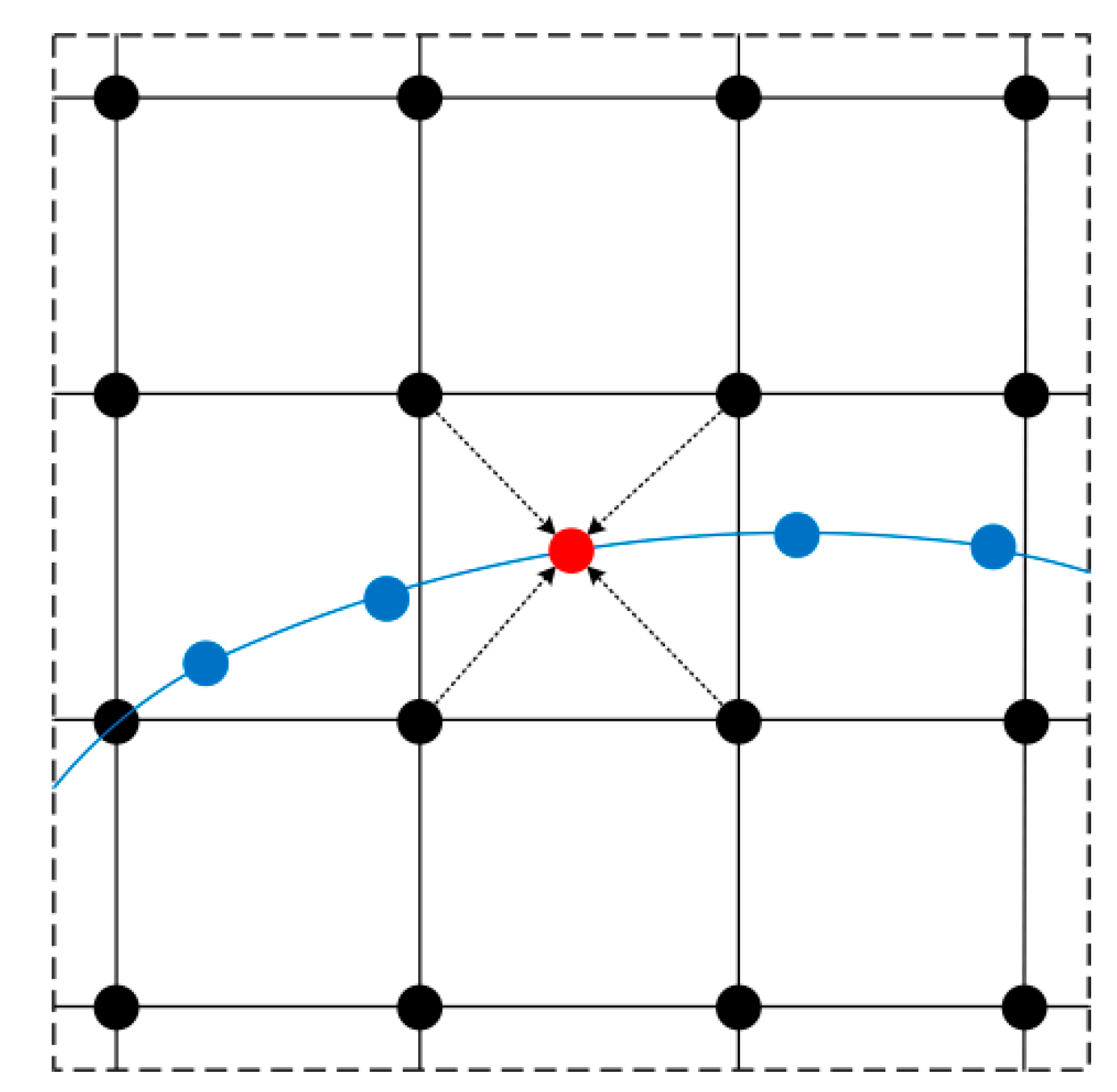
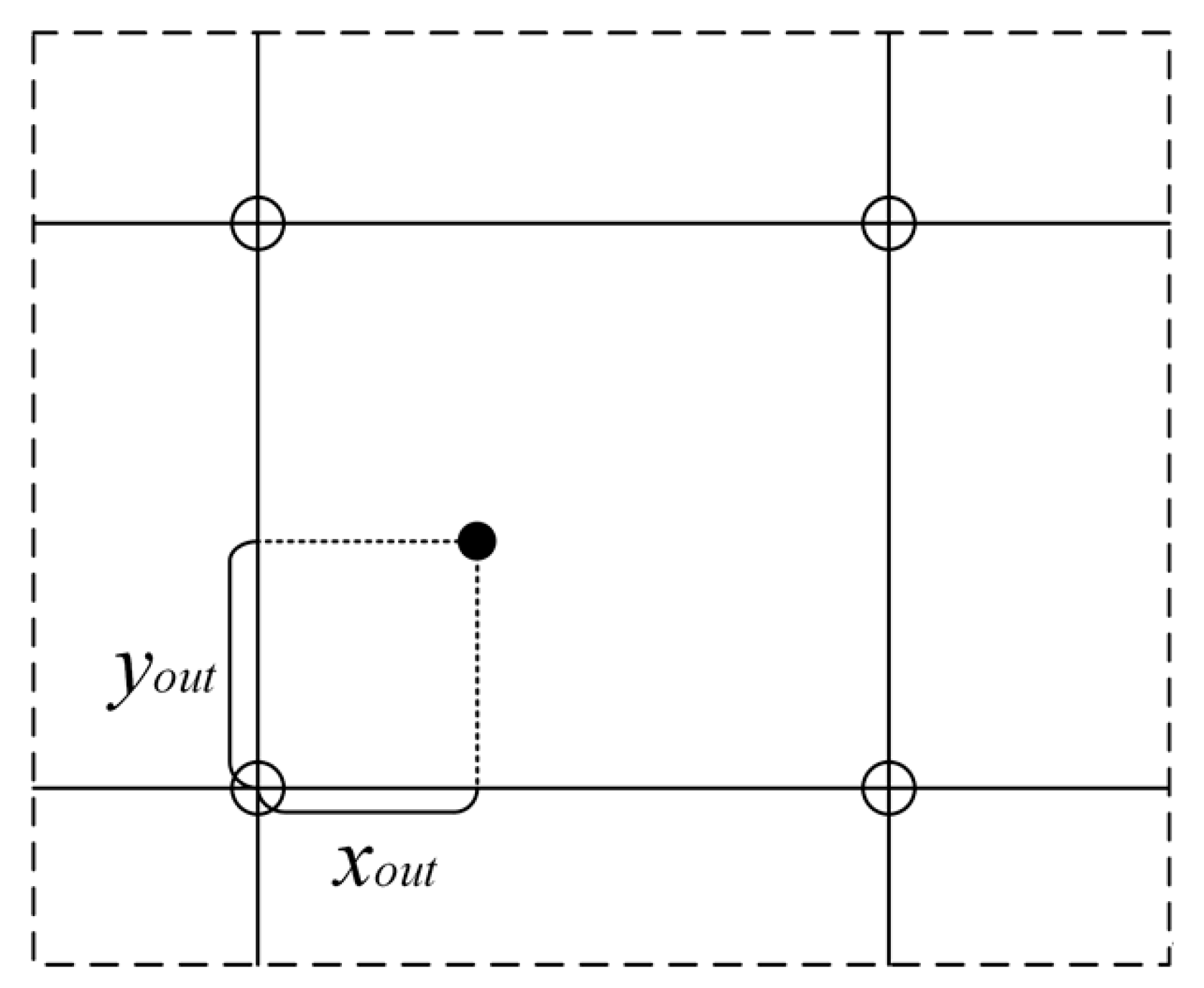
2.2. Marking and Tracing of Interfaces
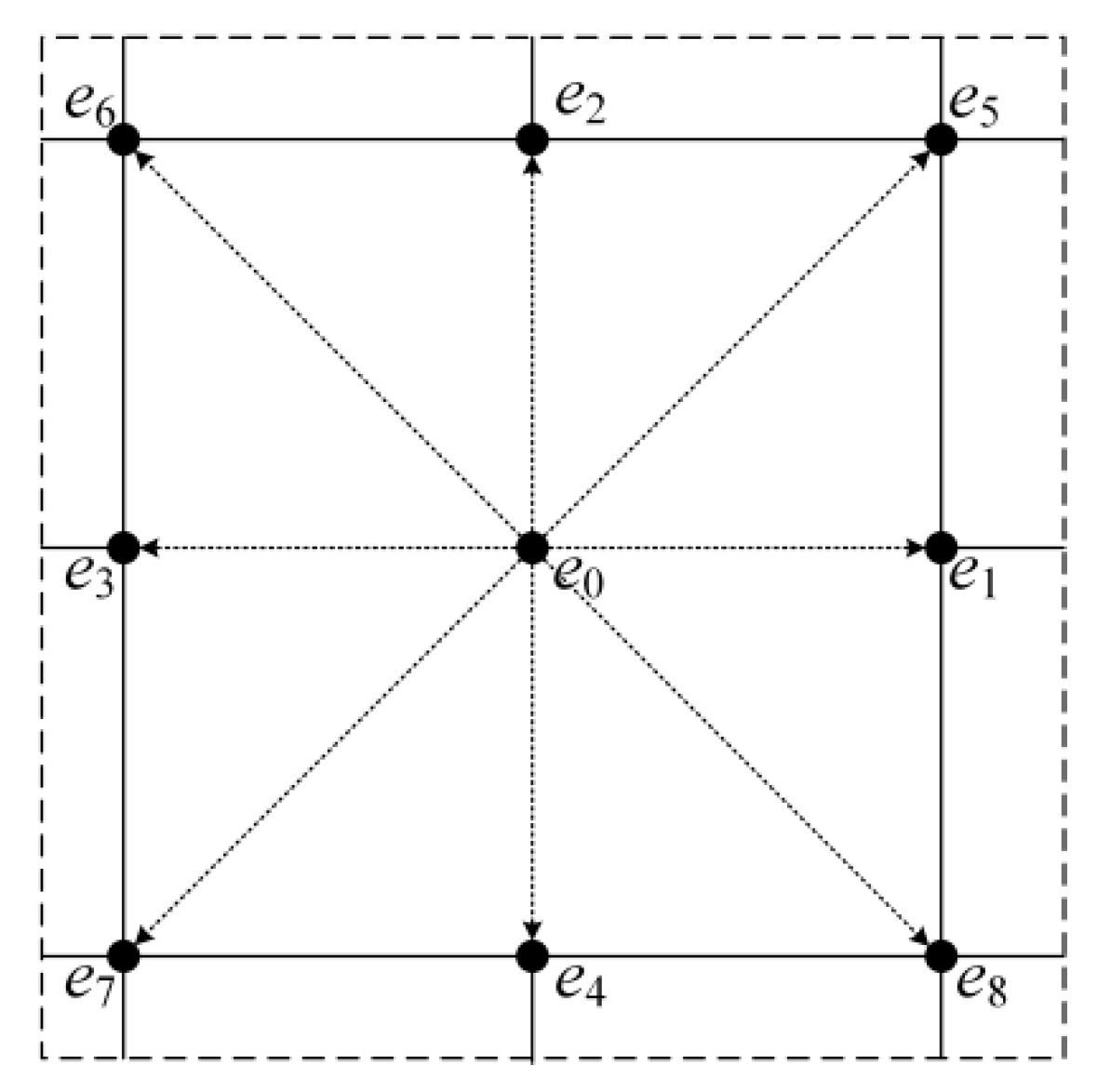
2.3. Lattice Boltzmann Method Modeling
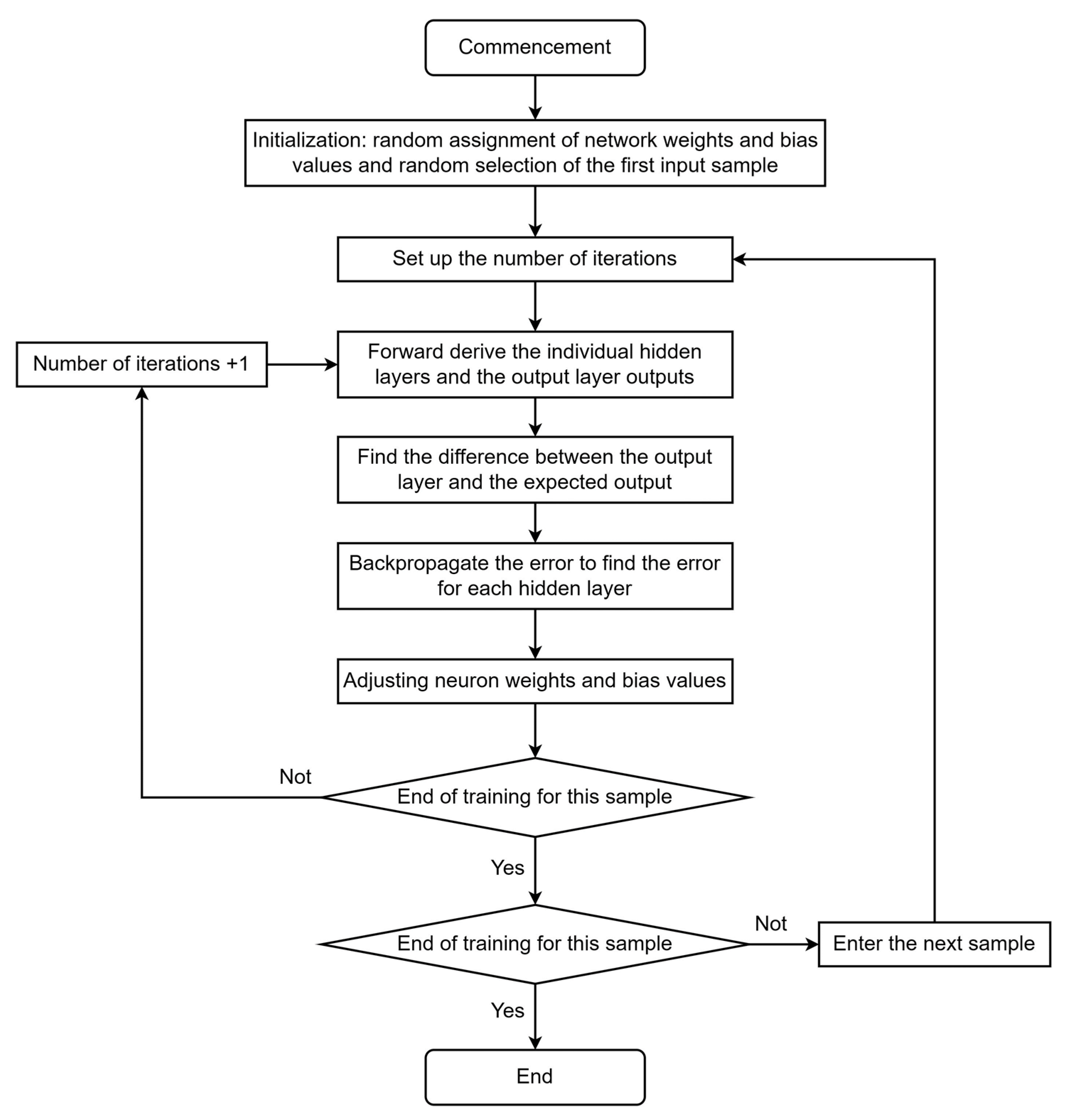
2.4. Bayesian Regularized Backpropagation Neural Network Model
- Initialize the network weights and bias values.
- 2.
- Perform forward propagation.
- as the weight between the ith neuron of Layer (n) and the jth neuron of Layer (n + 1).
- as the bias term of the ith neuron of Layer (n + 1).
- as the input value of the jth neuron of Layer (n + 1).
- as the output of the jth neuron of Layer (n + 1) after the activation function.
- 3.
- Calculate the error and back propagate.
- 4.
- Updating the network weights.
- 5.
- Determine if training is over.
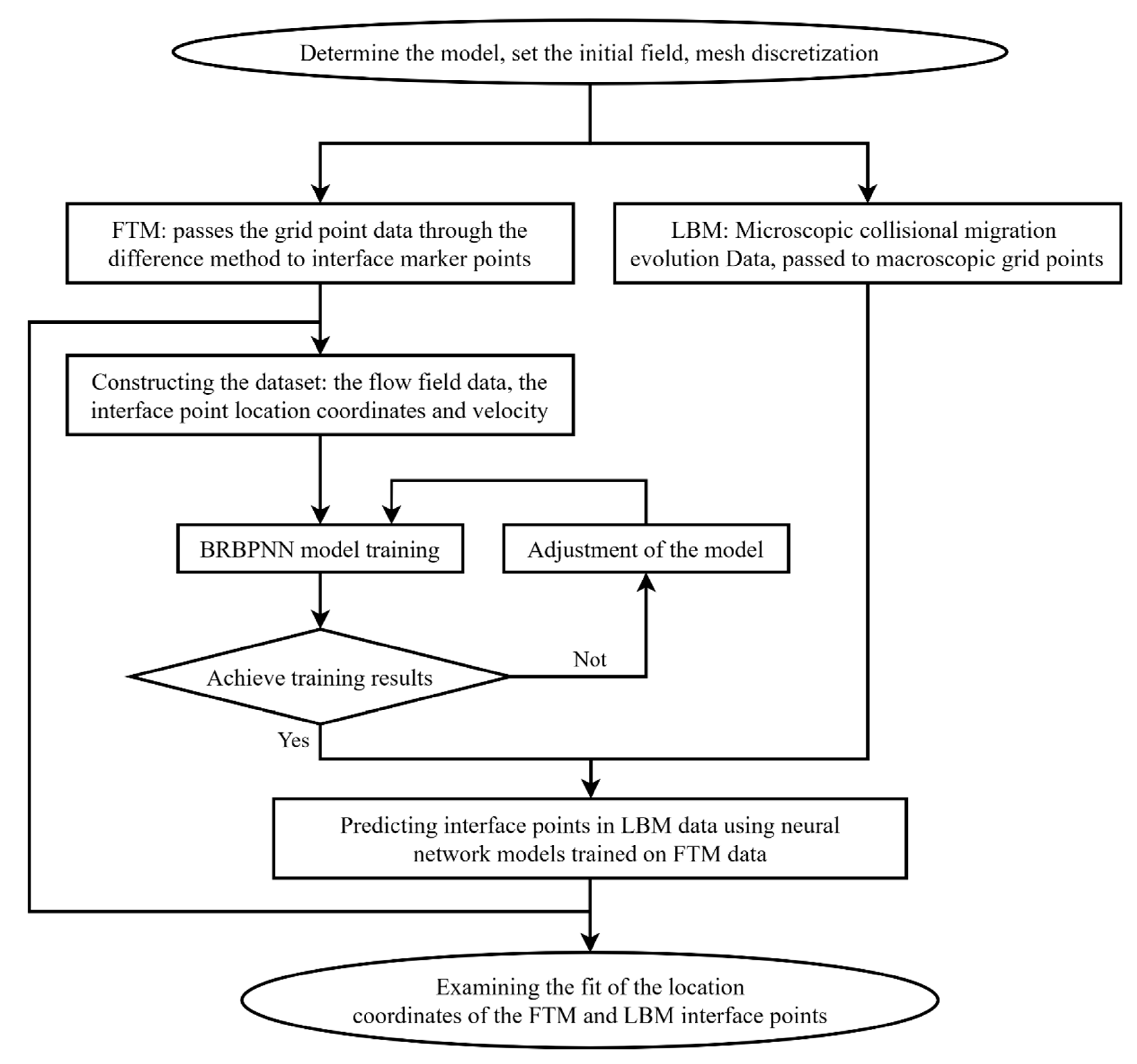
2.5. Technical Route to Machine-Learning-Based FT-LB Coupled Modeling
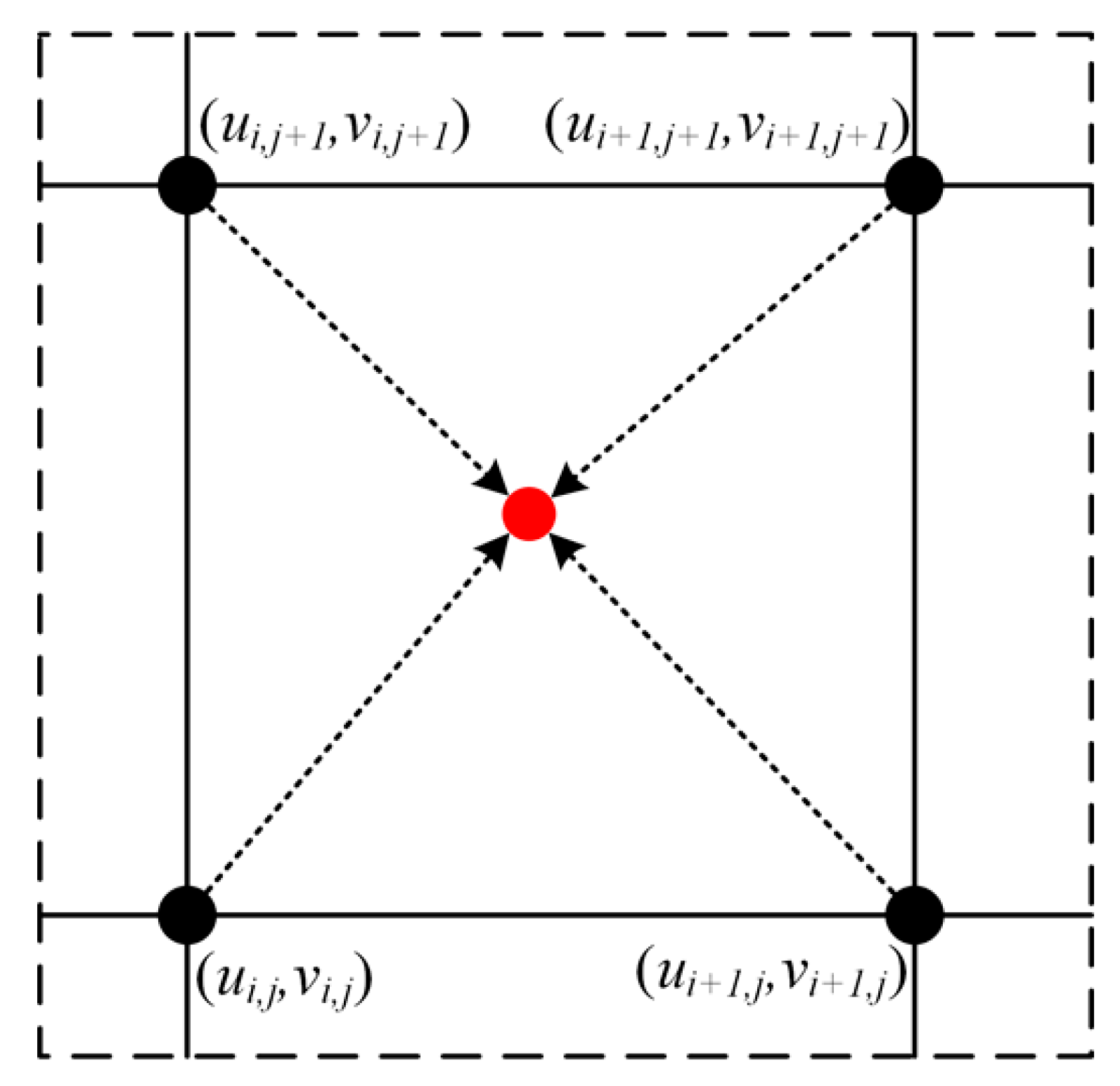
- By using the FTM to simulate the motion process of single bubble ascent, the flow field information updated with time is obtained, and the position coordinates of each interface point, the position coordinates of each grid point, and the velocity corresponding to them are recorded, which are used to construct the input and output sets of the machine learning neural network.
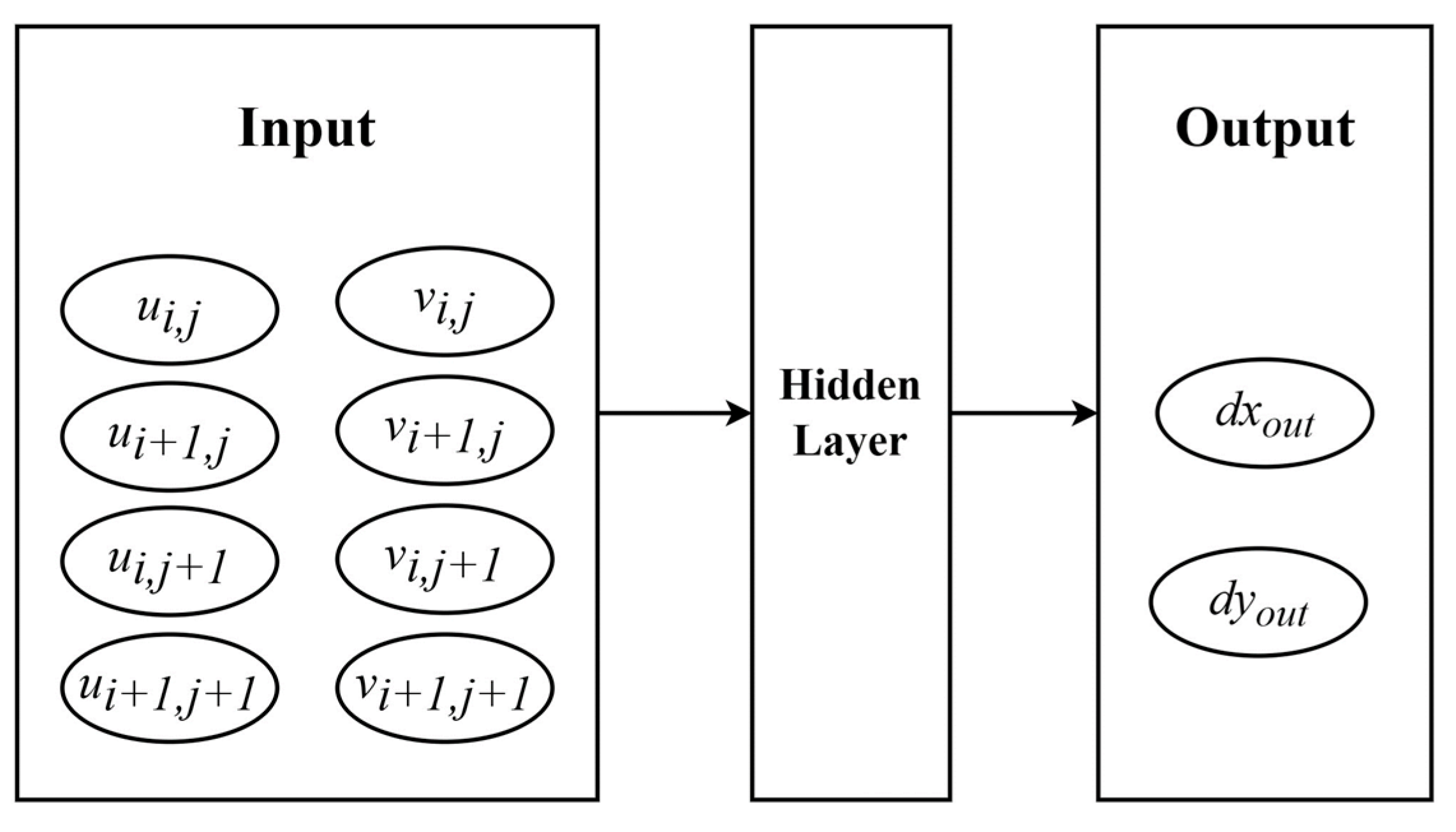
- In the current paper, the BRBPNN model is used to train the neural network for single bubble ascent, with the velocity field information of the basin as the input set of the neural network port and the interface marking point positions as the output set of the neural network port. The purpose of this is to construct the dataset and the test set, to study the optimal optimization and screening of the dataset, and then to study the optimization of the parameters of the neural network model in order to achieve the best training effect.
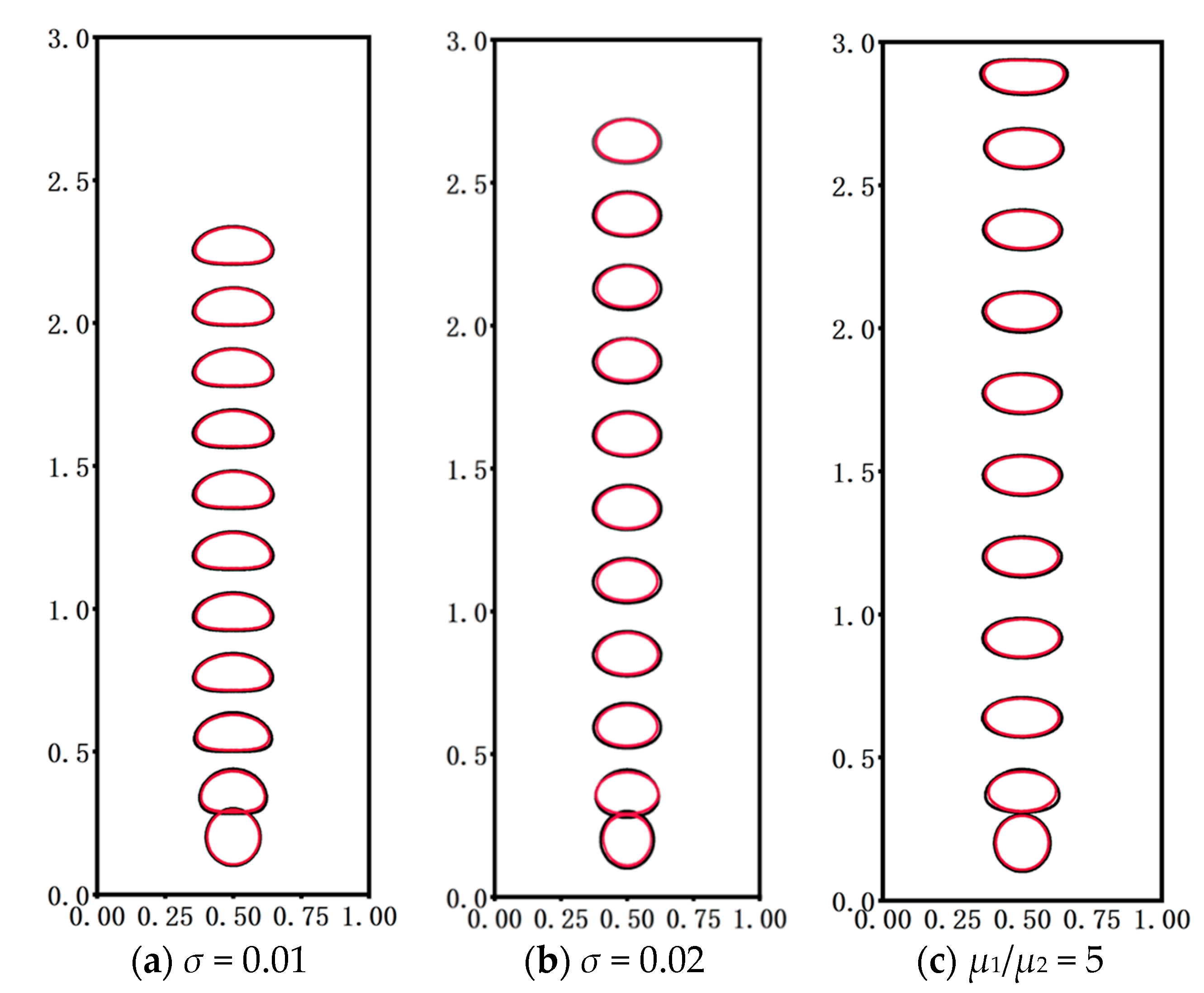
- The upward motion process of a single bubble is simulated by using the LBM to obtain its flow field information, the velocity at the maximum density gradient in the basin is taken as the input to the trained neural network model, the predicted interface marking points in the Eulerian mesh of the LBM are output and compared with the interface marking points simulated by the FTM, and then the algorithms are verified in terms of their stability, accuracy, efficiency of the solution, and adaptability of the physical model. The FT-LB coupled computational model is then improved.
3. Modeling and Discussion
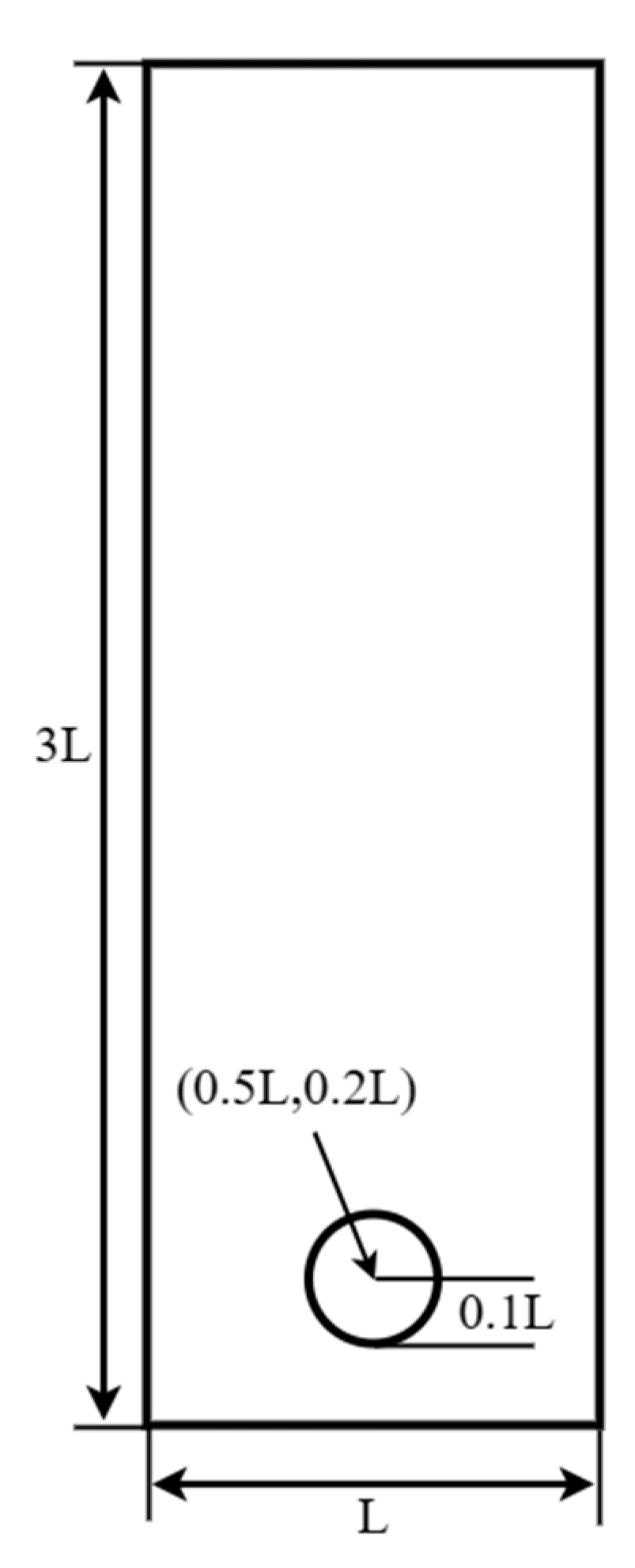
3.1. Front-Tracking Method Modeling
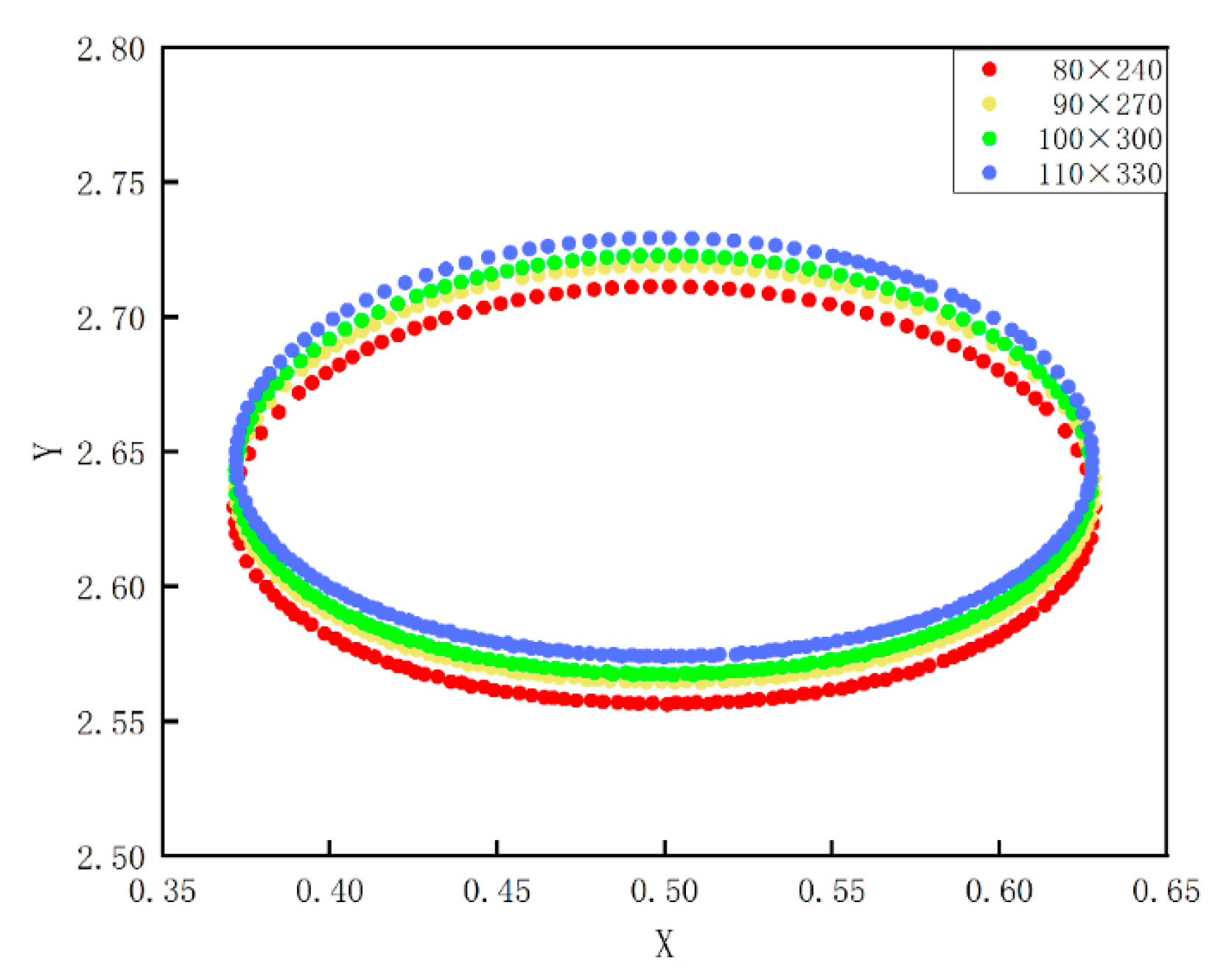
3.2. Grid-Independent Validation of the Front-Tracking Method Model
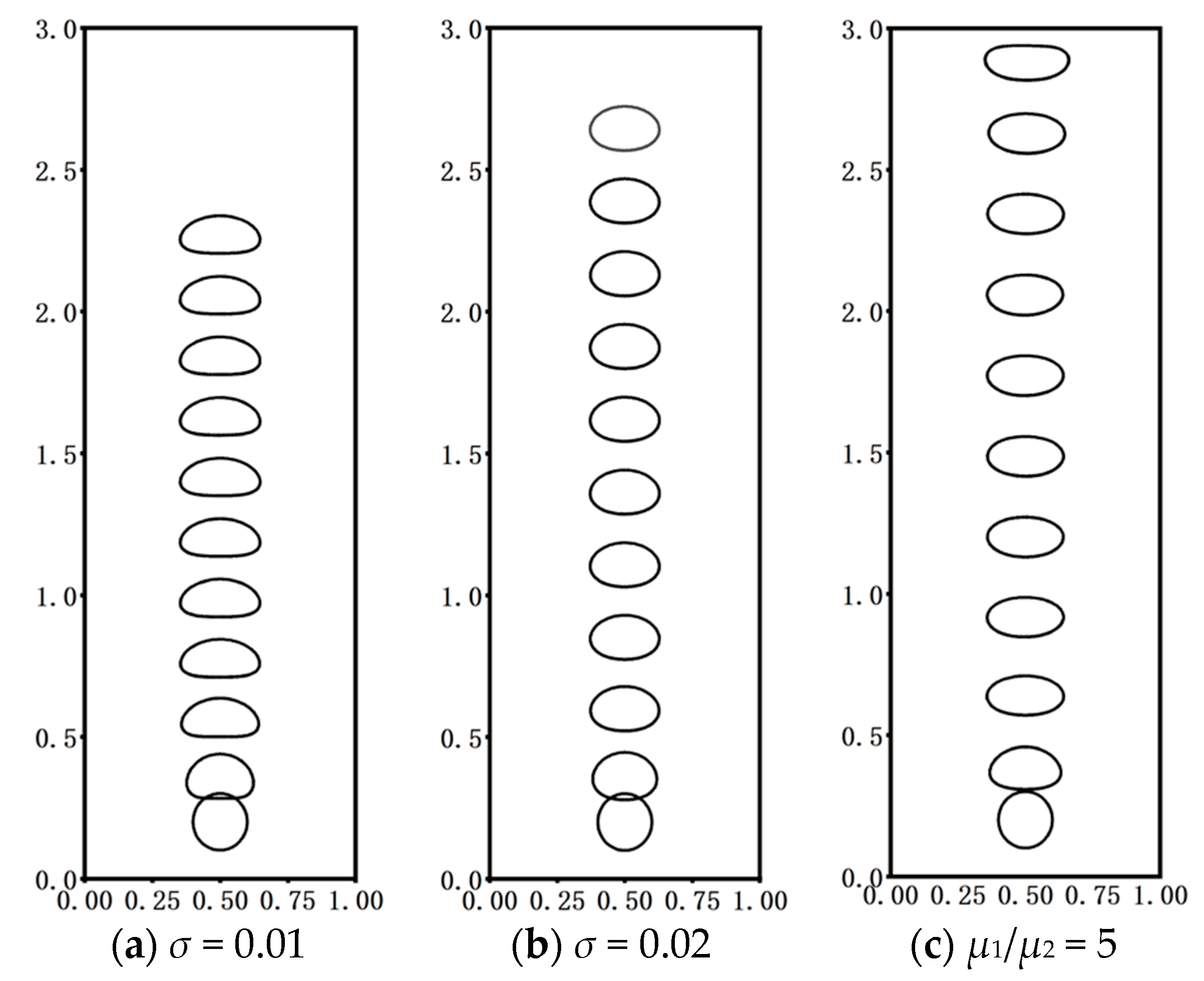
3.3. Influence of the FTM-Based Surface Tension Coefficient and Kinetic Viscosity on the Rise of a Single Vacuole
3.4. Neural Network Modeling
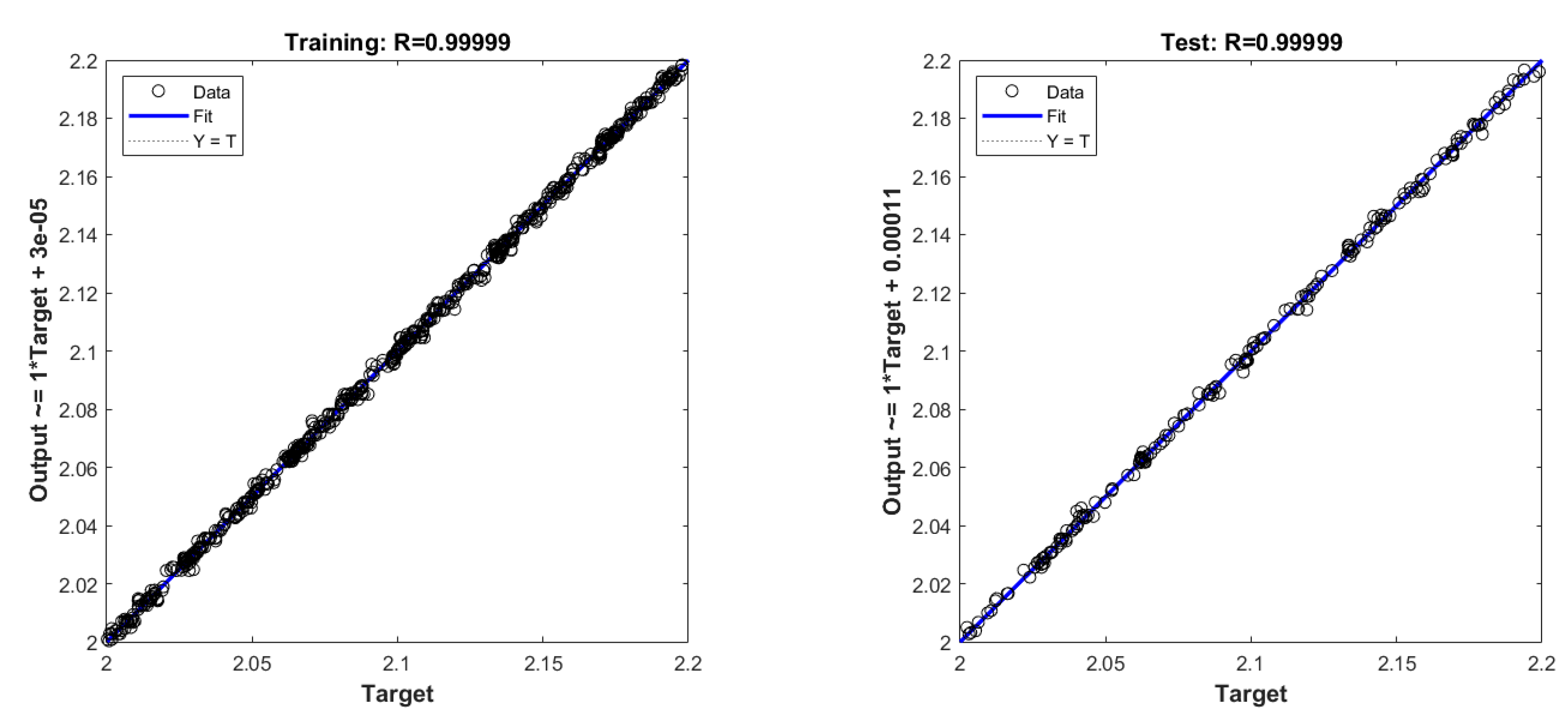
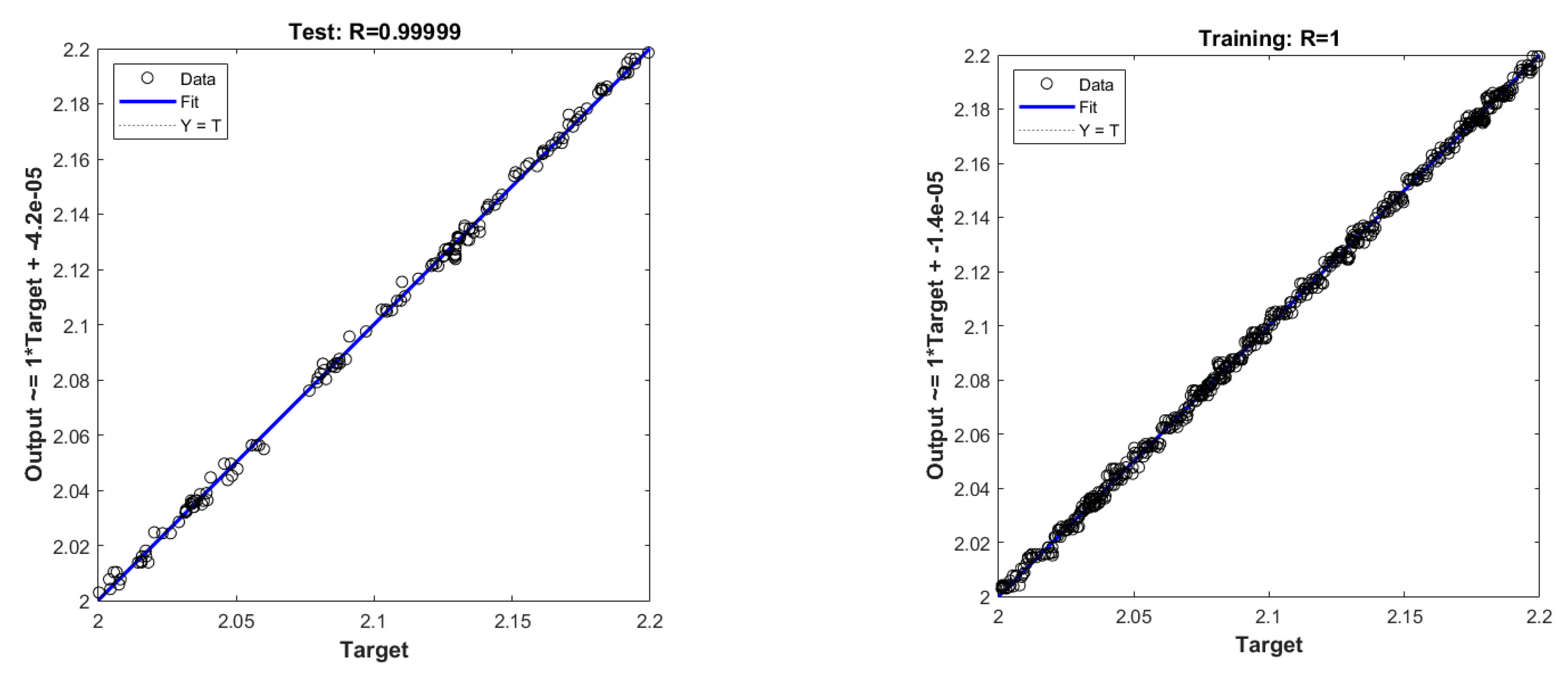
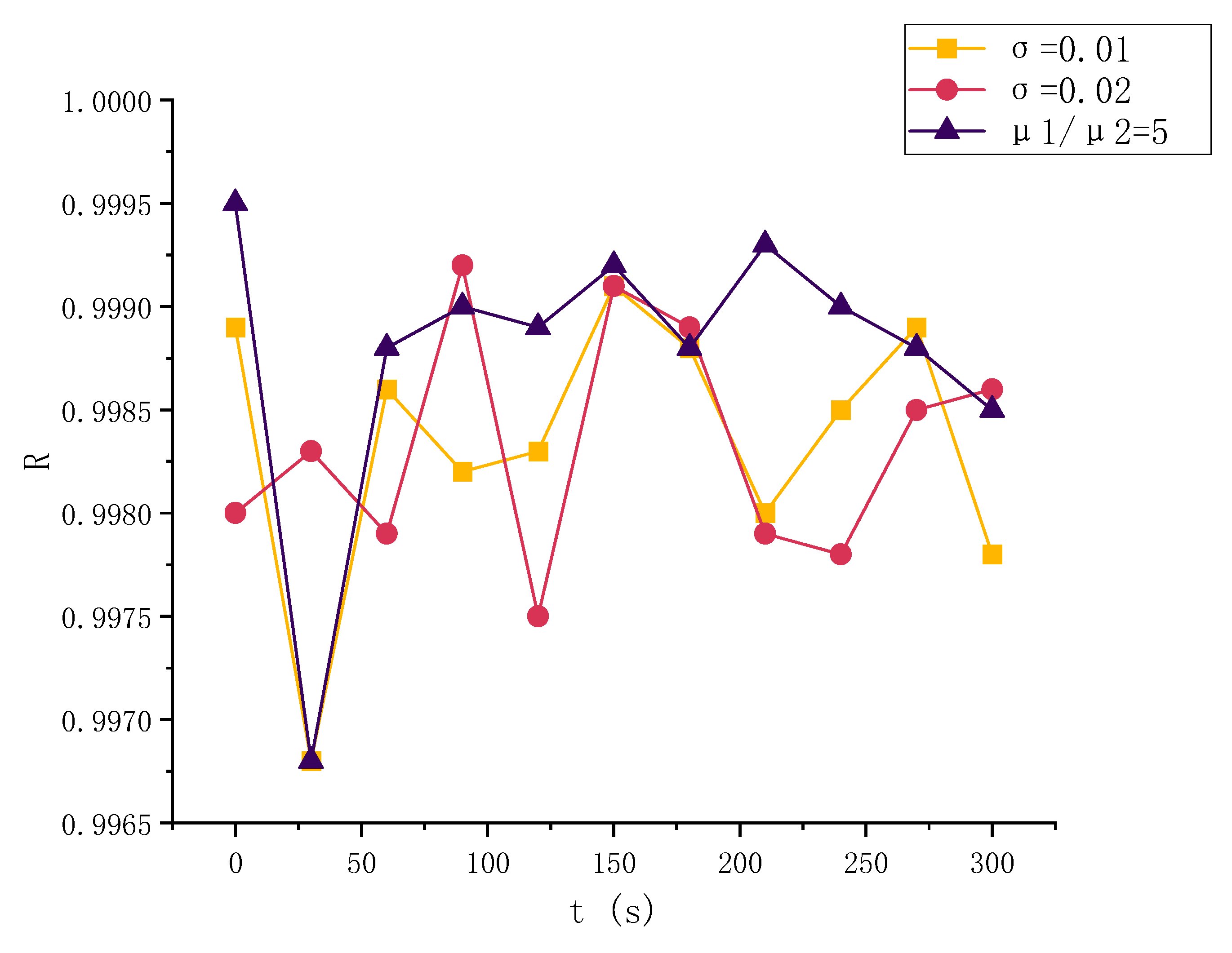
3.5. Training Results of the BRBPNN Model with Different Surface Tension Coefficients and Dynamic Viscosity Ratios
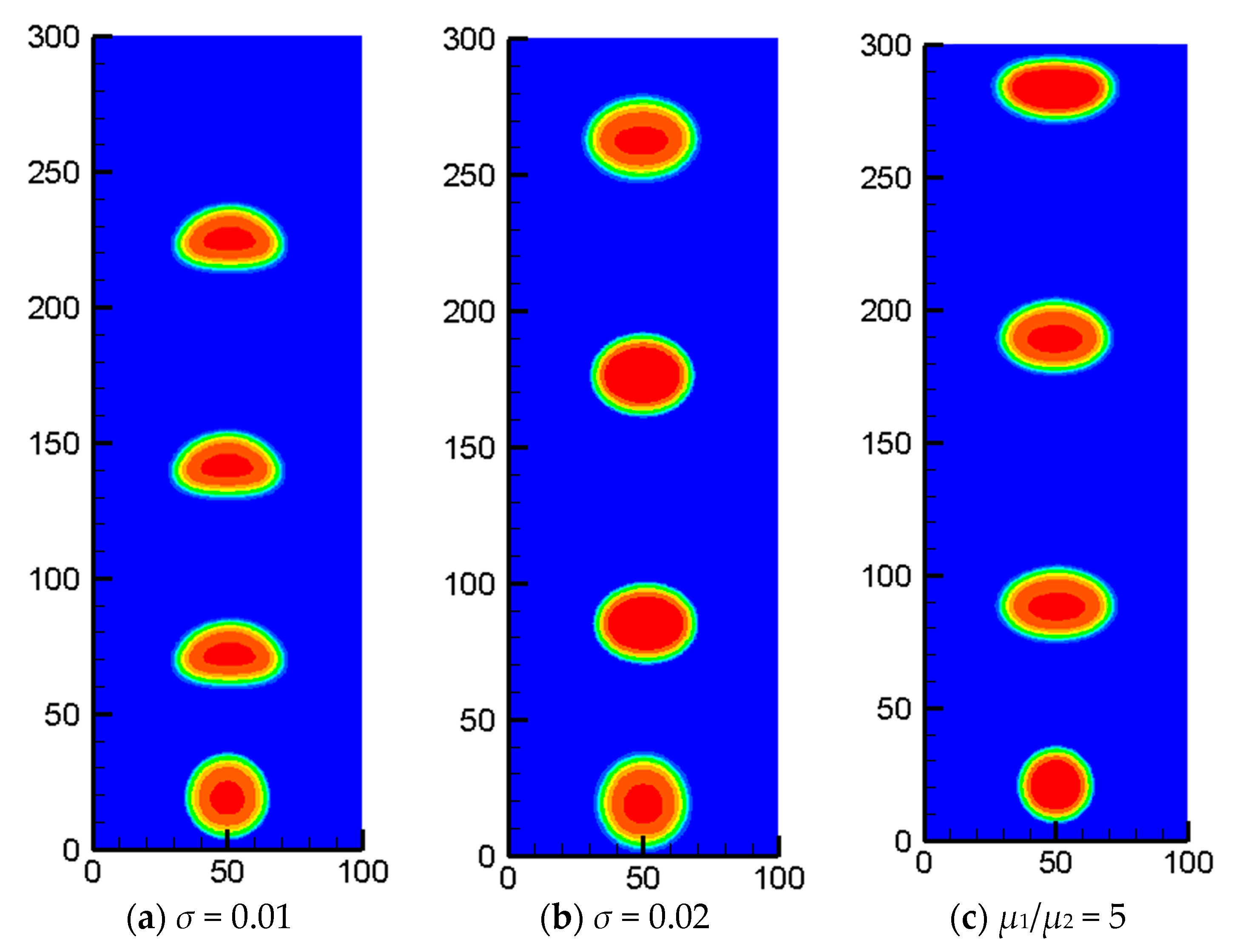
3.6. Simulation Results of the Multi-Relaxation Lattice Boltzmann Pseudopotential Model
3.7. Lattice Boltzmann Method Model Interface Point Prediction
4. Conclusions
- (1)
- By inputting the LBM’s grid point velocities into the trained neural network, the location of the phase interface is accurately labeled and the problem of ambiguous descriptions of the phase interface in LBM simulations is successfully solved.
- (2)
- The accuracy and feasibility of the BRBPNN model meet the requirements of the FT-LB coupling model. The FT-LB coupling model based on BRBPNN machine learning is constructed, and its feasibility regarding adjustability and accuracy is verified by simulations of different working conditions.
- (3)
- Considering a more complex multiphase flow process, three-dimensional physical models can be considered in future studies. It is expected that future research will delve further into the phenomenon of liquid structural damage and expand the scope of the study to cover more complex scenarios.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| a | Acceleration of the Particle (m/s2) | Sample Expectation | |
| b | Bias Term | (x, y) | Cartesian Coordinate Components |
| c | Lattice Velocity (m/s) | (u, v) | Velocity Component along x,y Direction |
| C | Motion Velocity of the Particle (m/s) | Greek Symbols | |
| e | Discrete Velocity (m/s) | γ | Relaxation Time |
| Ed | Mean Square Error | δt | Particle Movement Time (s) |
| F | Interaction Force | δ | Reverse Output |
| f | Particle Distribution Function | ζ | Regulation Rate |
| Equilibrium Distribution Function | θ | Activation Function | |
| h(x) | Output Result | μ | Viscosity |
| g | Gravitational Acceleration (m/s2) | Density (kg/m3) | |
| G | Strength of Interaction | Surface Tension Coefficient | |
| L | Constant | Interaction Potential | |
| p | Pressure (pa) | ω | Weight Factor of Interaction |
| r | Position Coordinate of the Particle | Suberscripts | |
| R | Fitting Degree Coefficient | h | Step Size |
| s | Input Value | i | Neuron Code |
| t | Time (s) | j | Neuron Code |
| Time Step | k | Neuron Code | |
| u | Velocity Vector (m/s) | n | Certain Moment |
| u* | Temporary Velocity (m/s) | n + 1 | Next Moment of Moment |
| w | Weighting Factor Constant | Cartesian Coordinate Components | |
| Space Step | out | Output Item | |
| xi | Sample Value | t | Number of Iterations |
References
- Yuan, Z.; Wu, R.; Wu, X. Numerical simulations of multi-hop jumping on Superhydrophobic Surfaces. Int. J. Heat Mass Transf. 2019, 135, 345–353. [Google Scholar] [CrossRef]
- Lin, S.; Lu, J.; Tryggvason, G.; Zhang, Y. The effect of fluid shear on oscillating bubbly flows. Phys. Fluids 2019, 31, 042110. [Google Scholar] [CrossRef]
- Lu, M.; Lu, J.; Zhang, Y.; Gretar, T. Effect of electrostatic forces on the distribution of drops in turbulent channel flows. Phys. Fluids 2019, 31, 105104. [Google Scholar] [CrossRef]
- Tryggvason, G.; Bunner, B.; Esmaeeli, A.; Juric, D.; Al-Rawahi, N.; Tauber, W.; Han, J.; Nas, S.; Jan, Y.J. A Front-Tracking Method for the Computations of Multiphase Flow. J. Comput. Phys. 2001, 169, 708–759. [Google Scholar] [CrossRef]
- Unverdi, S.O.; Tryggvason, G. A Front-Tracking Method for Viscous, Incompressible, Multi-Fluid Flows. J. Comput. Phys. 1992, 100, 25–37. [Google Scholar] [CrossRef]
- Li, W.; Lu, J.; Tryggvason, G.; Zhang, Y. Numerical study of droplet motion on discontinuous wetting gradient surface with rough strip. Phys. Fluids 2021, 33, 012111. [Google Scholar] [CrossRef]
- Lu, J.; Fernández, A.; Tryggvason, G. The Effect of Bubbles on The Wall Drag in A Turbulent Channel Flow. Phys. Fluids 2005, 17, 095102–095113. [Google Scholar] [CrossRef]
- Min, L.; Jiacai, L.; Ying, Z.; Gretar, T. Numerical Study of Thermocapillary Migration of a Bubble in A Channel with An Obstruction. Phys. Fluids 2019, 31, 062101. [Google Scholar]
- Juric, D.; Tryggvason, G. Computations of Boiling Flows. Int. J. Multiph. Flow 1998, 24, 387–410. [Google Scholar] [CrossRef]
- Li, Q.; Luo, K.H.; Kang, Q.J.; He, Y.L.; Chen, Q.; Liu, Q. Lattice Boltzmann Methods for Multiphase Flow and Phase-Change Heat Transfer. Physics 2015, 52, 62–105. [Google Scholar] [CrossRef]
- Zhaoli, G.; Chuguang, Z. Principles and Applications of The Lattice Boltzmann Method; Science Press: Beijing, China, 2009. [Google Scholar]
- Yaling, H.; Qing, L.; Yong, W. Theory and Application of Lattice Boltzmann Method; China Education Publishing Media Group: Beijing, China; Higher Education Press: Beijing, China, 2023. [Google Scholar]
- Wandong, Z. Theoretical and Applied Study of The Pseudopotential Multiphase Lattice Boltzmann Model. Ph.D. Thesis, Nanchang University, Nanchang, China.
- Shan, X.; Chen, H. Lattice Boltzmann Model for Simulating Flows with Multiple Phases and Components. Phys. Rev. E 1993, 47, 1815–1819. [Google Scholar] [CrossRef] [PubMed]
- Kupershtokh, A.L.; Karpov, D.I.; Medvedev, D.A. Stochastic Models of Partial Discharge Activity in Solid and Liquid Dielectrics. Sci. Meas. Technol. IET 2007, 1, 303–311. [Google Scholar] [CrossRef]
- Guo, Z.L.; Zhao, T.S. Discrete Velocity and Lattice Boltzmann Models for Binary Mixtures of Nonideal Fluids. Phys. Review. E Stat. Nonlinear Soft Matter Phys. 2003, 68, 035302. [Google Scholar] [CrossRef] [PubMed]
- Li, Q.; Luo, K.H.; Li, X.J. Forcing Scheme in Pseudopotential Lattice Boltzmann Model for Multiphase Flows. Phys. Rev. E Stat. Nonlinear Soft Matter Phys. 2012, 86, 016709. [Google Scholar] [CrossRef]
- Kupershtokh, A.L.; Medvedev, D.A.; Karpov, D.I. On Equations of State in A Lattice Boltzmann Method. Comput. Math. Appl. 2009, 58, 965–974. [Google Scholar] [CrossRef]
- Zhao, Y.; Liang-Shih, F. Multirelaxation-Time Interaction-Potential-Based Lattice Boltzmann Model for Two-Phase Flow. Phys. Rev. E. Stat. Nonlinear Soft Matter Phys. 2010, 82, 046708. [Google Scholar]
- McCracken, M.E.; Abraham, J. Multiple-Relaxation-Time Lattice-Boltzmann Model for Multiphase Flow. Phys. Rev. E 2005, 71, 036701. [Google Scholar] [CrossRef] [PubMed]
- Lallemand, P.; Luo, L.-S.; Peng, Y. A Lattice Boltzmann Front-Tracking Method for Interface Dynamics with Surface Tension in Two Dimensions. J. Comput. Phys. 2008, 226, 1367–1384. [Google Scholar] [CrossRef]
- Sui, Y.; Low, H.T.; Chew, Y.T.; Roy, P. A Front-Tracking Lattice Boltzmann Method to Study Flow-Induced Deformation of Three-Dimensional Capsules. Comput. Fluids 2010, 39, 499–511. [Google Scholar] [CrossRef]
- Haiqiong, X.; Zhong, Z.; Liangqi, Z. Three-Dimensional Multi-Relaxation-Time Lattice Boltzmann Front-Tracking Method for Two-Phase Flow. Chin. Phys. B 2016, 25, 667–672. [Google Scholar]
- Yuan, Z.; Gao, S.; Hu, Z.; Dai, L.; Hou, H.; Chu, F.; Wu, X. Ultimate jumping of coalesced droplets on superhydrophobic surfaces. J. Colloid Interface Sci. 2020, 587, 429–436. [Google Scholar] [CrossRef] [PubMed]
- Yuan, Z.; Hou, H.; Dai, L.; Wu, X.; Tryggvason, G. Controlling the Jumping Angle of Coalescing Droplets Using Surface Structures. ACS Appl. Mater. Interfaces 2020, 12, 52221–52228. [Google Scholar] [CrossRef] [PubMed]
- Bishop, C.M.; James, G.D. Analysis of Multiphase Flows Using Dual-Energy Gamma Densitometry and Neural Networks. Nucl. Instrum. Methods Phys. Res. Sect. A-Accel. Spectrometers Detect. Assoc. Equip. 1993, 327, 580–593. [Google Scholar] [CrossRef]
- Milano, M.; Koumoutsakos, P. Neural Network Modeling for Near Wall Turbulent Flow. J. Comput. Phys. 2002, 182, 1–26. [Google Scholar] [CrossRef]
- Ma, X.; Wang, C.; Huang, B.; Wang, G. Application of Two-Branch Deep Neural Network to Predict Bubble Migration Near Elastic Boundaries. Phys. Fluids 2019, 31, 102003. [Google Scholar] [CrossRef]
- Han, R.; Wang, Y.; Zhang, Y.; Chen, G. A Novel Spatial-Temporal Prediction Method for Unsteady Wake Flows Based on Hybrid Deep Neural Network. Phys. Fluids 2019, 31, 127101. [Google Scholar] [CrossRef]
- Chen, R.; Jin, X.; Li, H. A machine learning based solver for pressure Poisson equations. Theor. Appl. Mech. Lett. 2022, 12, 100362. [Google Scholar] [CrossRef]
- Brenner, M.P.; Eldredge, J.D.; Freund, J.B. Perspective on machine learning for advancing fluid mechanics. Phys. Rev. Fluids 2019, 4, 100501. [Google Scholar] [CrossRef]
- Qian, Y.X.; Zhang, T. The Second Order Projection Method in Time for The Time-Dependent Natural Convection Problem. Appl. Math. 2016, 61, 299–315. [Google Scholar] [CrossRef]
- Bell, J.; Solomon, J.; Szymczak, W. A Second-Order Projection Method for The Incompressible Navier Stokes Equations on Quadrilateral Grids. In Proceedings of the 9th Computational Fluid Dynamics Conference, Buffalo, NY, USA, 13–15 June 1989. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, P.; Zhou, H.; Ke, Z.; Zhao, S.; Zhang, Y.; Liu, J.; Tian, Y. A Coupled Machine Learning and Lattice Boltzmann Method Approach for Immiscible Two-Phase Flows. Mathematics 2024, 12, 109. https://doi.org/10.3390/math12010109
Li P, Zhou H, Ke Z, Zhao S, Zhang Y, Liu J, Tian Y. A Coupled Machine Learning and Lattice Boltzmann Method Approach for Immiscible Two-Phase Flows. Mathematics. 2024; 12(1):109. https://doi.org/10.3390/math12010109
Chicago/Turabian StyleLi, Peisheng, Hongsheng Zhou, Zhaoqing Ke, Shuting Zhao, Ying Zhang, Jiansheng Liu, and Yuan Tian. 2024. "A Coupled Machine Learning and Lattice Boltzmann Method Approach for Immiscible Two-Phase Flows" Mathematics 12, no. 1: 109. https://doi.org/10.3390/math12010109
APA StyleLi, P., Zhou, H., Ke, Z., Zhao, S., Zhang, Y., Liu, J., & Tian, Y. (2024). A Coupled Machine Learning and Lattice Boltzmann Method Approach for Immiscible Two-Phase Flows. Mathematics, 12(1), 109. https://doi.org/10.3390/math12010109