
Cooperative Control for Signalized Intersections in Intelligent Connected Vehicle Environments


Abstract
1. Introduction
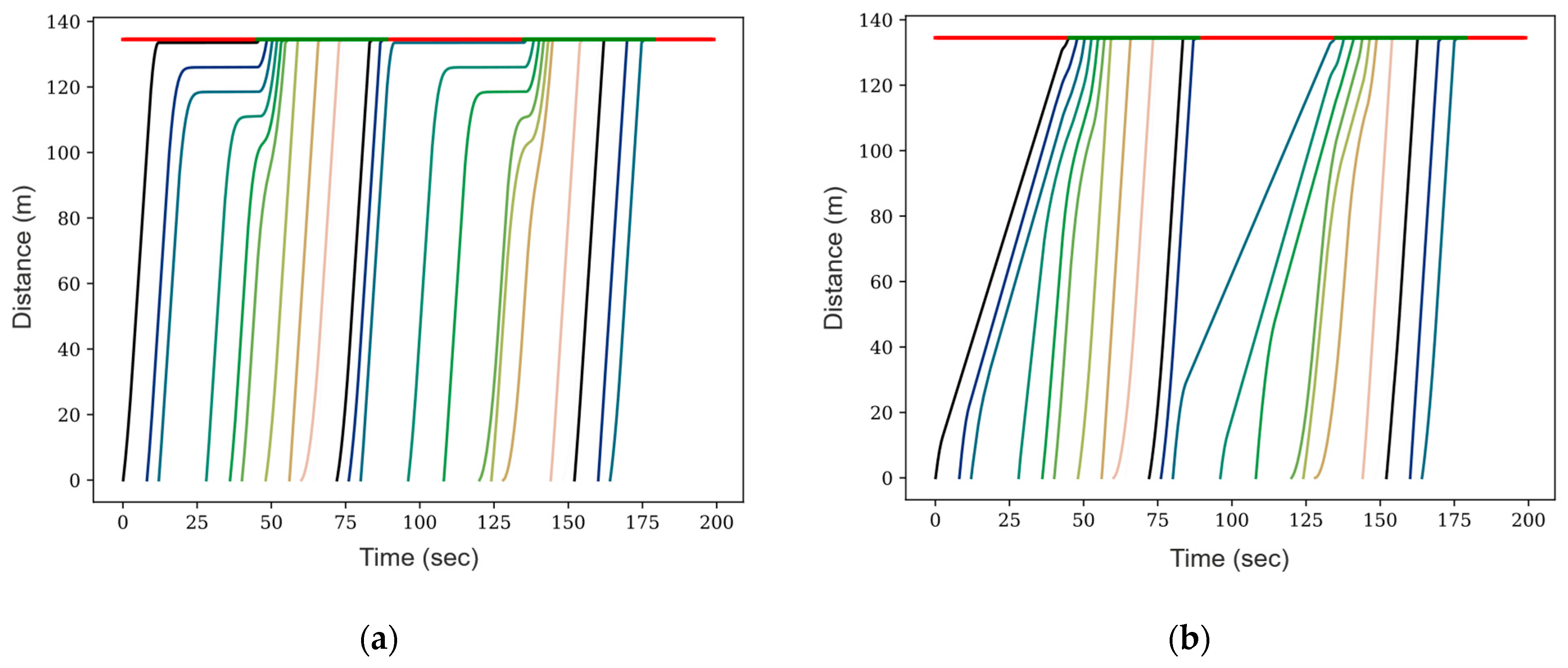
- Construction of vehicle trajectories with the condition that the intersection will be reached when the green traffic light is on;
- Estimation of the vehicle arrival time at the intersection, taking into account the vehicle trajectory or using a neural network prediction model;
- Assessment of the observed state of the transport network, including the stop delay for vehicles at the intersection and the arrival time at the intersection for each vehicle;
- Selection of the traffic signal phase based on the observed state using the selected adaptive traffic signal control algorithm; and
- Reconstruction of the vehicle trajectory, for which the predictive traffic signal phase has changed.
- A method of coordinated control of vehicle trajectories and traffic signals; and
- An algorithm for adaptive traffic signal control that maximizes the number of vehicles passing through the intersection, taking into account the trajectory of their movement and/or the arrival time at the intersection predicted by the neural network model.
2. Related Works
2.1. Traffic Signal Control
2.2. Trajectory Construction
2.3. Cooperative Control
3. Cooperative Control Method
3.1. Problem Formulation
3.2. Adaptive Traffic Signal Control
3.2.1. MPC-Based Algorithm
| Algorithm 1: MaxPWFlow algorithm |
| 1: Input data: 2: Output data: 3: if then 4: 5: 6: else 7: 8: 9: end if |
- For vehicles with the known (constructed) trajectory, the crossing time is calculated precisely according to the trajectory since the trajectory determines the vehicle speed at each time moment; and
- For other vehicles, the crossing time is estimated using a prediction model based on the deep neural network (DNN) model.
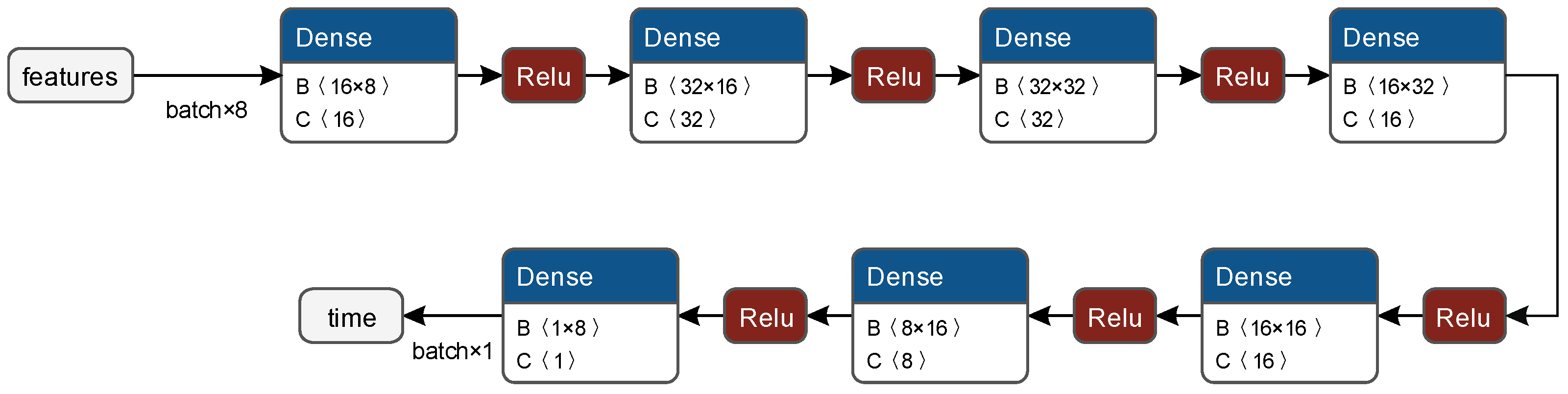
3.2.2. Crossing Time Prediction Algorithm
- Distance from the current vehicle position to the intersection;
- Vehicle speed;
- Vehicle acceleration;
- Maximum allowed speed;
- Number of preceding vehicles;
- Type of the expected movement direction at the intersection; and
- Speed and position of the nearest vehicle on the outgoing lane.
3.3. Trajectory Construction
3.4. Cooperative Control
- Construct trajectories for all lead vehicles on each lane assuming for all lanes;
- Calculate the crossing time :
- For the lead vehicles, is calculated based on the constructed trajectory;
- For other vehicles, is calculated using the crossing time prediction algorithm described in Section 3.2.2;
- Select the next phase using the adaptive traffic signal control algorithm MaxPWFlow described in Section 3.2:
- Calculate the traffic demand using (2);
- Select the next phase that maximizes the traffic demand; and
- Given the predicted next phase , reconstruct trajectories for all lead vehicles for which the assumption is not satisfied.
4. Experiments
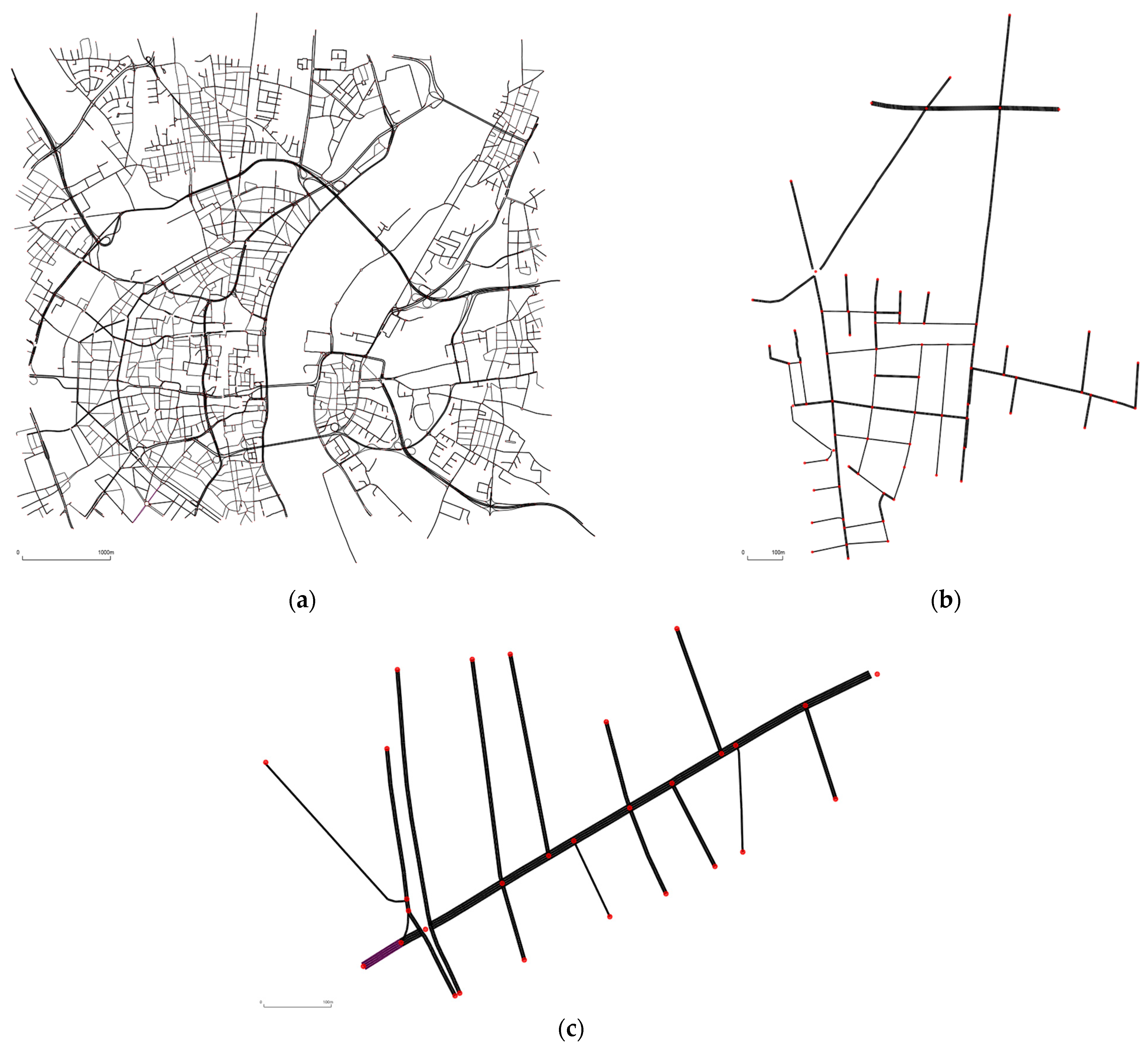
4.1. Case Study
4.2. Baseline Methods
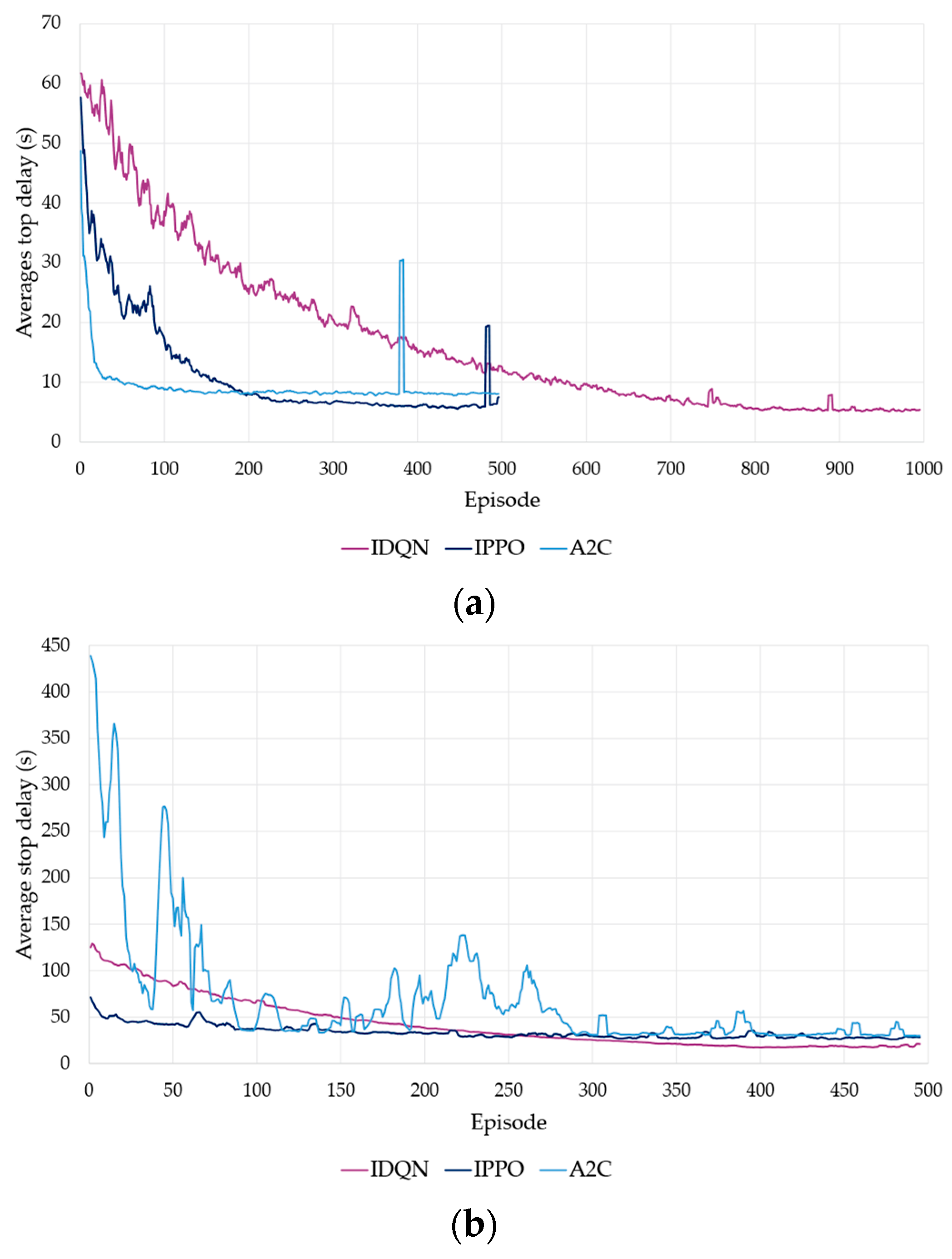
- IDQN: the independent DQN adaptive traffic signal control algorithm, in which each intersection is controlled by 1 RL agent [65];
- IPPO: the independent proximal policy optimization algorithm [65];
- A2C: the advantage actor–critic algorithm [66];
- MaxPWFlow: the MPC-based algorithm described in Section 3.2.1 [17];
- Trajectory Control: the semicooperative algorithm with MPC-based adaptive TSC control [17];
- Trajectory Control + RL: the semicooperative algorithm with IDQN-based adaptive TSC control; and
- Cooperative Control: the method of cooperative control proposed in this paper.
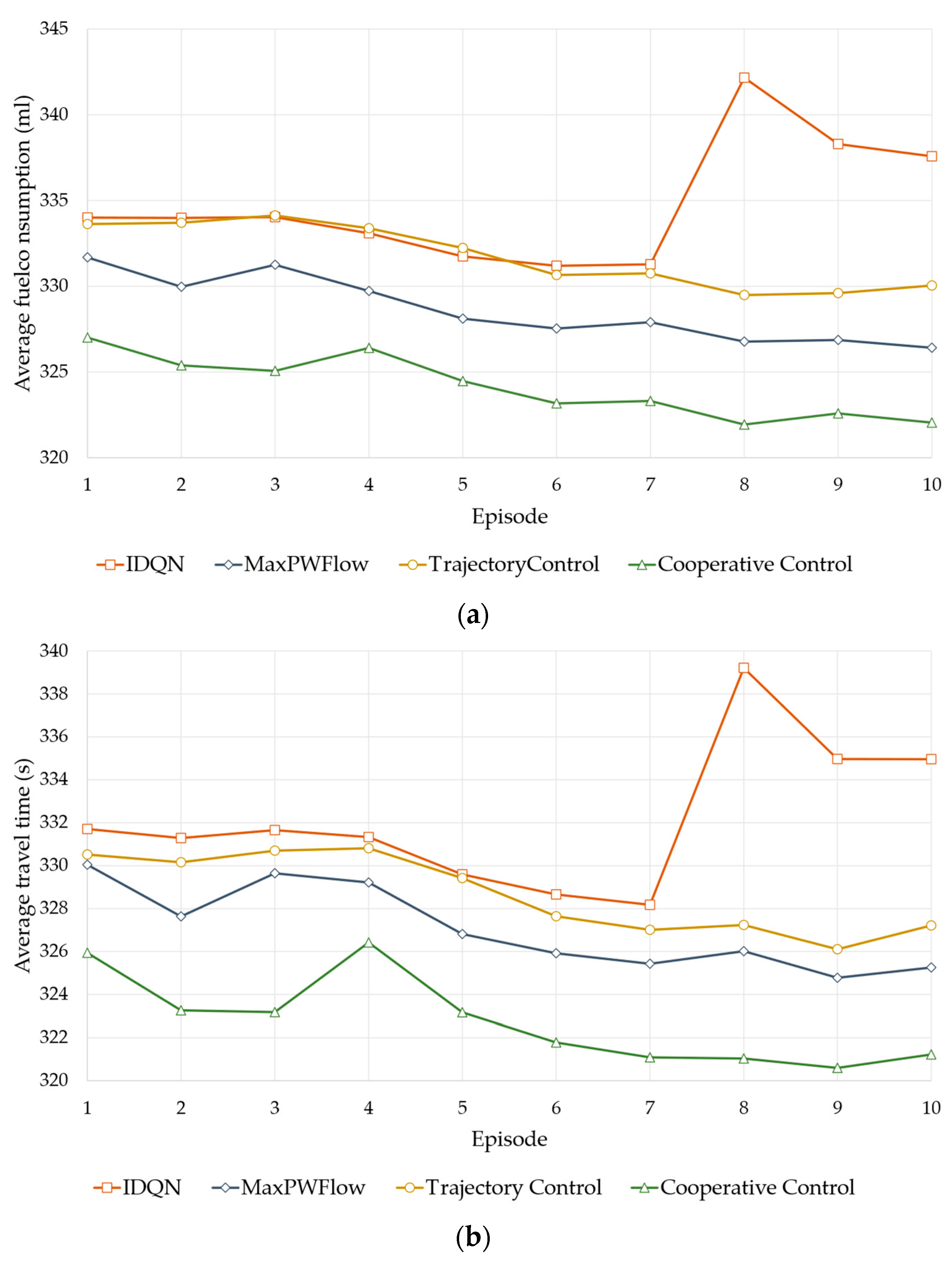
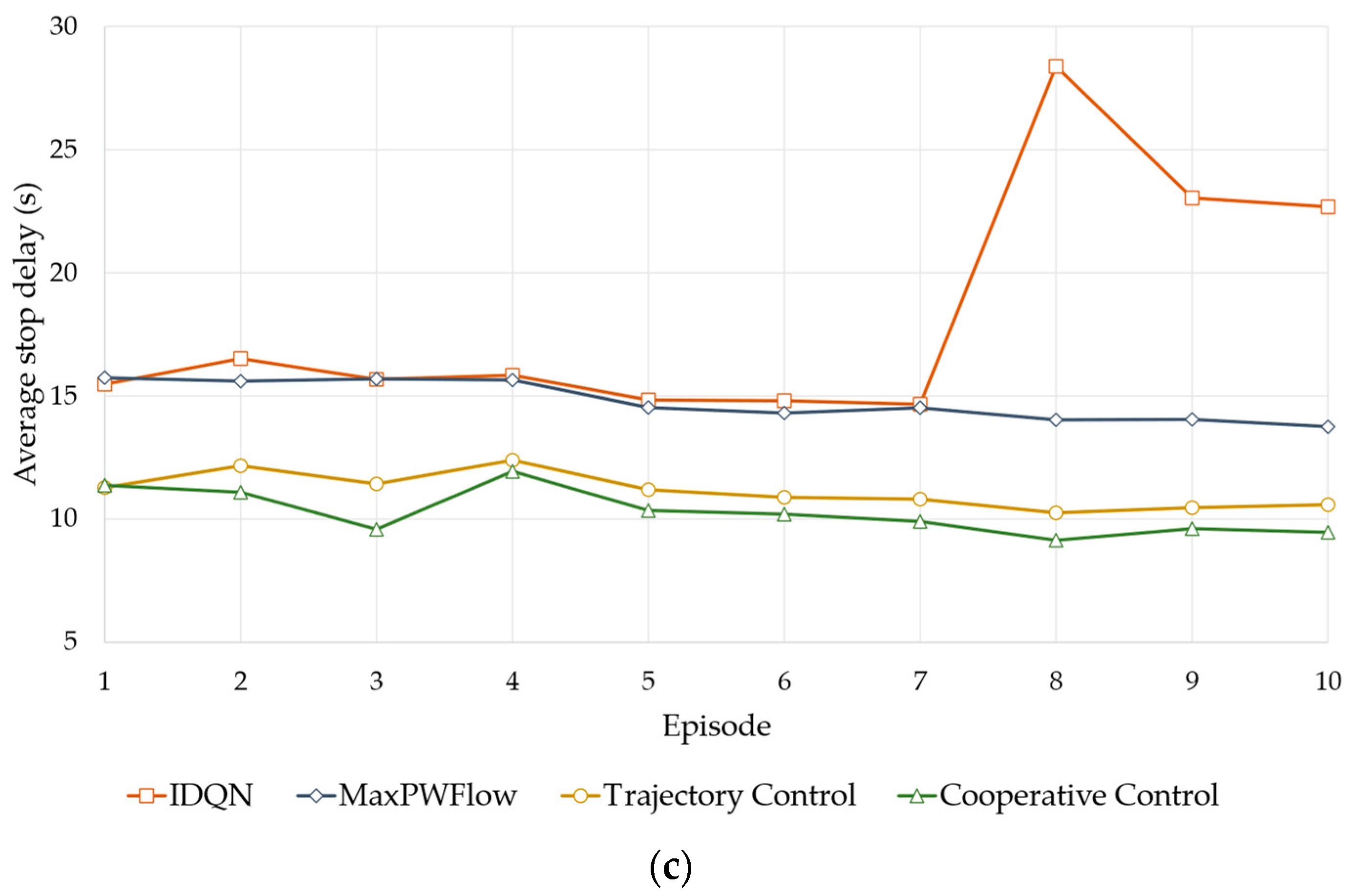
4.3. Experimental Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- United States. Department of Transportation. Bureau of Transportation Statistics. Transportation Statistics Annual Report 2022; United States. Department of Transportation. Bureau of Transportation Statistics: Washington, DC, USA, 2022. [CrossRef]
- Pishue, B. 2022 INRIX Global Traffic Scorecard. Available online: https://inrix.com/scorecard/ (accessed on 18 February 2023).
- Balid, W.; Tafish, H.; Refai, H.H. Intelligent Vehicle Counting and Classification Sensor for Real-Time Traffic Surveillance. IEEE Trans. Intell. Transp. Syst. 2018, 19, 1784–1794. [Google Scholar] [CrossRef]
- Zhao, S.; Xing, S.; Mao, G. An Attention and Wavelet Based Spatial-Temporal Graph Neural Network for Traffic Flow and Speed Prediction. Mathematics 2022, 10, 3507. [Google Scholar] [CrossRef]
- Gu, Y.; Deng, L. STAGCN: Spatial–Temporal Attention Graph Convolution Network for Traffic Forecasting. Mathematics 2022, 10, 1599. [Google Scholar] [CrossRef]
- Kholodov, Y.; Alekseenko, A.; Kazorin, V.; Kurzhanskiy, A. Generalization Second Order Macroscopic Traffic Models via Relative Velocity of the Congestion Propagation. Mathematics 2021, 9, 2001. [Google Scholar] [CrossRef]
- Wei, H.; Zheng, G.; Gayah, V.; Li, Z. A Survey on Traffic Signal Control Methods. arXiv 2020, arXiv:1904.08117. [Google Scholar]
- Haydari, A.; Yılmaz, Y. Deep Reinforcement Learning for Intelligent Transportation Systems: A Survey. IEEE Trans. Intell. Transp. Syst. 2022, 23, 11–32. [Google Scholar] [CrossRef]
- Moreira-Matias, L.; Mendes-Moreira, J.; de Sousa, J.F.; Gama, J. Improving Mass Transit Operations by Using AVL-Based Systems: A Survey. IEEE Trans. Intell. Transp. Syst. 2015, 16, 1636–1653. [Google Scholar] [CrossRef]
- Sarvi, M.; Kuwahara, M. Using ITS to Improve the Capacity of Freeway Merging Sections by Transferring Freight Vehicles. IEEE Trans. Intell. Transp. Syst. 2008, 9, 580–588. [Google Scholar] [CrossRef]
- Agafonov, A.A.; Yumaganov, A.S. Bus Arrival Time Prediction Using Recurrent Neural Network with LSTM Architecture. Opt. Mem. Neural Netw. 2019, 28, 222–230. [Google Scholar] [CrossRef]
- Lv, Z.; Shang, W. Impacts of Intelligent Transportation Systems on Energy Conservation and Emission Reduction of Transport Systems: A Comprehensive Review. Green Technol. Sustain. 2023, 1, 100002. [Google Scholar] [CrossRef]
- Gupta, M.; Benson, J.; Patwa, F.; Sandhu, R. Secure V2V and V2I Communication in Intelligent Transportation Using Cloudlets. IEEE Trans. Serv. Comput. 2022, 15, 1912–1925. [Google Scholar] [CrossRef]
- Wang, Y.; Yan, Y.; Shen, T.; Bai, S.; Hu, J.; Xu, L.; Yin, G. An Event-Triggered Scheme for State Estimation of Preceding Vehicles under Connected Vehicle Environment. IEEE Trans. Intell. Veh. 2023, 8, 583–593. [Google Scholar] [CrossRef]
- Xu, B.; Ban, X.J.; Bian, Y.; Wang, J.; Li, K. V2I Based Cooperation between Traffic Signal and Approaching Automated Vehicles. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017. [Google Scholar]
- Agafonov, A.; Yumaganov, A.; Myasnikov, V. An Algorithm for Cooperative Control of Traffic Signals and Vehicle Trajectories. In Proceedings of the 2022 4th International Conference on Control Systems, Mathematical Modeling, Automation and Energy Efficiency (SUMMA), Lipetsk, Russia, 9–11 November 2022; pp. 675–680. [Google Scholar]
- Agafonov, A.A.; Yumaganov, A.S.; Myasnikov, V.V. Adaptive Traffic Signal Control Based on Neural Network Prediction of Weighted Traffic Flow. Optoelectron. Instrum. Data Process. 2022, 58, 503–513. [Google Scholar] [CrossRef]
- Lopez, P.A.; Wiessner, E.; Behrisch, M.; Bieker-Walz, L.; Erdmann, J.; Flotterod, Y.-P.; Hilbrich, R.; Lucken, L.; Rummel, J.; Wagner, P. Microscopic Traffic Simulation Using SUMO. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 2575–2582. [Google Scholar]
- Nguyen, D.D.; Rohacs, J. Smart City Total Transport-Managing System: (A Vision Including the Cooperating, Contract-Based and Priority Transport Management). In Lecture Notes of the Institute for Computer Sciences, Social Informatics and Telecommunications Engineering; Springer International Publishing: Cham, Switzerland, 2019; pp. 74–85. ISBN 9783030058722. [Google Scholar]
- Nguyen, D.D.; Rohács, J.; Rohács, D.; Boros, A. Intelligent Total Transportation Management System for Future Smart Cities. Appl. Sci. 2020, 10, 8933. [Google Scholar] [CrossRef]
- Webster, F.V. Traffic Signal Settings; H.M. Stationery Office: Richmond, UK, 1958. [Google Scholar]
- Little, J.; Kelson, M.; Gartner, N. MAXBAND: A Program for Setting Signals on Arteries and Triangular Networks. Transp. Res. Rec. J. Transp. Res. Board 1981, 795, 40–46. [Google Scholar]
- Papageorgiou, M.; Kiakaki, C.; Dinopoulou, V.; Kotsialos, A.; Wang, Y. Review of Road Traffic Control Strategies. Proc. IEEE 2003, 91, 2043–2067. [Google Scholar] [CrossRef]
- Ribeiro, I.M.; Simões, M.d.L.d.O. The Fully Actuated Traffic Control Problem Solved by Global Optimization and Complementarity. Eng. Optim. 2016, 48, 199–212. [Google Scholar] [CrossRef]
- Cools, S.-B.; Gershenson, C.; D’Hooghe, B. Self-Organizing Traffic Lights: A Realistic Simulation. In Advances in Applied Self-Organizing Systems; Prokopenko, M., Ed.; Advanced Information and Knowledge Processing; Springer: London, UK, 2013; pp. 45–55. ISBN 978-1-4471-5113-5. [Google Scholar]
- Varaiya, P. The Max-Pressure Controller for Arbitrary Networks of Signalized Intersections. In Advances in Dynamic Network Modeling in Complex Transportation Systems; Ukkusuri, S.V., Ozbay, K., Eds.; Complex Networks and Dynamic Systems; Springer: New York, NY, USA, 2013; pp. 27–66. ISBN 978-1-4614-6243-9. [Google Scholar]
- Savithramma, R.M.; Sumathi, R. Road Traffic Signal Control and Management System: A Survey. In Proceedings of the 2020 3rd International Conference on Intelligent Sustainable Systems (ICISS), Thoothukudi, India, 3–5 December 2020; pp. 104–110. [Google Scholar]
- Lin, H.; Han, Y.; Cai, W.; Jin, B. Traffic Signal Optimization Based on Fuzzy Control and Differential Evolution Algorithm. IEEE Trans. Intell. Transp. Syst. 2022, 1–12. [Google Scholar] [CrossRef]
- Jafari, S.; Shahbazi, Z.; Byun, Y.-C. Improving the Road and Traffic Control Prediction Based on Fuzzy Logic Approach in Multiple Intersections. Mathematics 2022, 10, 2832. [Google Scholar] [CrossRef]
- Kamal, M.A.S.; Imura, J.; Ohata, A.; Hayakawa, T.; Aihara, K. Control of Traffic Signals in a Model Predictive Control Framework. IFAC Proc. Vol. 2012, 45, 221–226. [Google Scholar] [CrossRef]
- Yazici, A.; Seo, G.; Ozguner, U. A Model Predictive Control Approach for Decentralized Traffic Signal Control. IFAC Proc. Vol. 2008, 41, 13058–13063. [Google Scholar] [CrossRef]
- Nakanishi, H.; Namerikawa, T. Optimal Traffic Signal Control for Alleviation of Congestion Based on Traffic Density Prediction by Model Predictive Control. In Proceedings of the 2016 55th Annual Conference of the Society of Instrument and Control Engineers of Japan (SICE), Tsukuba, Japan, 20–23 September 2016; pp. 1273–1278. [Google Scholar]
- Shen, X.; Zhang, X.; Ouyang, T.; Li, Y.; Raksincharoensak, P. Cooperative Comfortable-Driving at Signalized Intersections for Connected and Automated Vehicles. IEEE Robot. Autom. Lett. 2020, 5, 6247–6254. [Google Scholar] [CrossRef]
- Li, L.; Wen, D.; Yao, D. A Survey of Traffic Control with Vehicular Communications. IEEE Trans. Intell. Transp. Syst. 2014, 15, 425–432. [Google Scholar] [CrossRef]
- Roess, R.; Prassas, E.; McShane, W. Traffic Engineering, 4th ed.; Pearson: Upper Saddle River, NJ, USA, 2010; ISBN 978-0-13-613573-9. [Google Scholar]
- Miao, W.; Li, L.; Wang, Z. A Survey on Deep Reinforcement Learning for Traffic Signal Control. In Proceedings of the 2021 33rd Chinese Control and Decision Conference (CCDC), Kunming, China, 22–24 May 2021; pp. 1092–1097. [Google Scholar]
- Tomar, I.; Indu, S.; Pandey, N. Traffic Signal Control Methods: Current Status, Challenges, and Emerging Trends. In Proceedings of Data Analytics and Management; Gupta, D., Polkowski, Z., Khanna, A., Bhattacharyya, S., Castillo, O., Eds.; Springer Nature: Singapore, 2022; pp. 151–163. [Google Scholar]
- Watkins, C.J.C.H.; Dayan, P. Q-Learning. Mach. Learn. 1992, 8, 279–292. [Google Scholar] [CrossRef]
- van der Pol, E.; Oliehoek, F.A. Coordinated Deep Reinforcement Learners for Traffic Light Control. In Proceedings of the Learning, Inference and Control of Multi-Agent Systems (at NIPS 2016), Barcelona, Spain, 5–10 December 2016; Available online: https://pure.uva.nl/ws/files/10793554/vanderpol_oliehoek_nipsmalic2016.pdf (accessed on 18 February 2023).
- Tan, T.; Bao, F.; Deng, Y.; Jin, A.; Dai, Q.; Wang, J. Cooperative Deep Reinforcement Learning for Large-Scale Traffic Grid Signal Control. IEEE Trans. Cybern. 2020, 50, 2687–2700. [Google Scholar] [CrossRef]
- Gao, J.; Shen, Y.; Liu, J.; Ito, M.; Shiratori, N. Adaptive Traffic Signal Control: Deep Reinforcement Learning Algorithm with Experience Replay and Target Network. arXiv 2017. [Google Scholar] [CrossRef]
- Ducrocq, R.; Farhi, N. Deep Reinforcement Q-Learning for Intelligent Traffic Signal Control with Partial Detection. Int. J. Intell. Transp. Syst. Res. 2023. [Google Scholar] [CrossRef]
- Boukerche, A.; Zhong, D.; Sun, P. A Novel Reinforcement Learning-Based Cooperative Traffic Signal System Through Max-Pressure Control. IEEE Trans. Veh. Technol. 2022, 71, 1187–1198. [Google Scholar] [CrossRef]
- van Hasselt, H.; Guez, A.; Silver, D. Deep Reinforcement Learning with Double Q-Learning. In Proceedings of the Thirtieth AAAI Conference on Artificial Intelligence; AAAI Press: Phoenix, Arizona, 2016; pp. 2094–2100. [Google Scholar]
- Agafonov, A.A.; Myasnikov, V.V. Hybrid Prediction-Based Approach for Traffic Signal Control Problem. Opt. Mem. Neural Netw. 2022, 31, 277–287. [Google Scholar] [CrossRef]
- Casas, N. Deep Deterministic Policy Gradient for Urban Traffic Light Control. arXiv 2017. [Google Scholar] [CrossRef]
- Zhu, Y.; Cai, M.; Schwarz, C.W.; Li, J.; Xiao, S. Intelligent Traffic Light via Policy-Based Deep Reinforcement Learning. Int. J. Intell. Transp. Syst. Res. 2022, 20, 734–744. [Google Scholar] [CrossRef]
- An, Y.; Zhang, J. Traffic Signal Control Method Based on Modified Proximal Policy Optimization. In Proceedings of the 2022 10th International Conference on Traffic and Logistic Engineering (ICTLE), Macau, China, 12–14 August 2022; pp. 83–88. [Google Scholar]
- Aslani, M.; Mesgari, M.S.; Seipel, S.; Wiering, M. Developing Adaptive Traffic Signal Control by Actor–Critic and Direct Exploration Methods. Proc. Inst. Civ. Eng.-Transp. 2019, 172, 289–298. [Google Scholar] [CrossRef]
- Chu, T.; Wang, J.; Codecà, L.; Li, Z. Multi-Agent Deep Reinforcement Learning for Large-Scale Traffic Signal Control. IEEE Trans. Intell. Transp. Syst. 2019, 21, 1086–1095. [Google Scholar] [CrossRef]
- Ma, D.; Zhou, B.; Song, X.; Dai, H. A Deep Reinforcement Learning Approach to Traffic Signal Control with Temporal Traffic Pattern Mining. IEEE Trans. Intell. Transp. Syst. 2022, 23, 11789–11800. [Google Scholar] [CrossRef]
- Genders, W.; Razavi, S. Evaluating Reinforcement Learning State Representations for Adaptive Traffic Signal Control. Procedia Comput. Sci. 2018, 130, 26–33. [Google Scholar] [CrossRef]
- Minnikhanov, R.; Anikin, I.; Mardanova, A.; Dagaeva, M.; Makhmutova, A.; Kadyrov, A. Evaluation of the Approach for the Identification of Trajectory Anomalies on CCTV Video from Road Intersections. Mathematics 2022, 10, 388. [Google Scholar] [CrossRef]
- Shepelev, V.; Zhankaziev, S.; Aliukov, S.; Varkentin, V.; Marusin, A.; Marusin, A.; Gritsenko, A. Forecasting the Passage Time of the Queue of Highly Automated Vehicles Based on Neural Networks in the Services of Cooperative Intelligent Transport Systems. Mathematics 2022, 10, 282. [Google Scholar] [CrossRef]
- Yu, C.; Sun, W.; Liu, H.X.; Yang, X. Managing Connected and Automated Vehicles at Isolated Intersections: From Reservation- to Optimization-Based Methods. Transp. Res. Part B Methodol. 2019, 122, 416–435. [Google Scholar] [CrossRef]
- Wang, Q.; Gong, Y.; Yang, X. Connected Automated Vehicle Trajectory Optimization along Signalized Arterial: A Decentralized Approach under Mixed Traffic Environment. Transp. Res. Part C Emerg. Technol. 2022, 145, 103918. [Google Scholar] [CrossRef]
- Zhou, F.; Li, X.; Ma, J. Parsimonious Shooting Heuristic for Trajectory Design of Connected Automated Traffic Part I: Theoretical Analysis with Generalized Time Geography. Transp. Res. Part B Methodol. 2017, 95, 394–420. [Google Scholar] [CrossRef]
- Ma, J.; Li, X.; Zhou, F.; Hu, J.; Park, B.B. Parsimonious Shooting Heuristic for Trajectory Design of Connected Automated Traffic Part II: Computational Issues and Optimization. Transp. Res. Part B Methodol. 2017, 95, 421–441. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, Y.; Zhu, H. Theory and Experiment of Cooperative Control at Multi-Intersections in Intelligent Connected Vehicle Environment: Review and Perspectives. Sustainability 2022, 14, 1542. [Google Scholar] [CrossRef]
- Guo, Y.; Ma, J. DRL-TP3: A Learning and Control Framework for Signalized Intersections with Mixed Connected Automated Traffic. Transp. Res. Part C Emerg. Technol. 2021, 132, 103416. [Google Scholar] [CrossRef]
- Du, Y.; Shangguan, W.; Chai, L. A Coupled Vehicle-Signal Control Method at Signalized Intersections in Mixed Traffic Environment. IEEE Trans. Veh. Technol. 2021, 70, 2089–2100. [Google Scholar] [CrossRef]
- Tajalli, M.; Hajbabaie, A. Traffic Signal Timing and Trajectory Optimization in a Mixed Autonomy Traffic Stream. IEEE Trans. Intell. Transp. Syst. 2022, 23, 6525–6538. [Google Scholar] [CrossRef]
- HBEFA—Handbook Emission Factors for Road Transport. Available online: https://www.hbefa.net/e/index.html (accessed on 14 February 2023).
- TAPASCologne. Available online: https://sumo.dlr.de/docs/Data/Scenarios/TAPASCologne.html (accessed on 15 February 2023).
- Ault, J.; Sharon, G. Reinforcement Learning Benchmarks for Traffic Signal Control. In Proceedings of the Neural Information Processing Systems Track on Datasets and Benchmarks (Round 1), Virtual-only Conference, 6–14 December 2021; Available online: https://datasets-benchmarks-proceedings.neurips.cc/paper/2021/file/f0935e4cd5920aa6c7c996a5ee53a70f-Paper-round1.pdf (accessed on 18 February 2023).
- PFRL. Available online: https://github.com/pfnet/pfrl (accessed on 15 February 2023).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scenario | Traffic Signals | Intersections | Segments | Trips |
|---|---|---|---|---|
| “Cologne-3” | 3 | 29 | 48 | 2830 |
| “Cologne-8” | 8 | 78 | 149 | 1740 |
| “Cologne-316” | 316 | 2928 | 5808 | 13,530 |
| Model | “Cologne-3” | “Cologne-8” | “Cologne-316” |
|---|---|---|---|
| IDQN | 64.24 ± 0.84 | 88.51 ± 1.76 | 334.74 ± 3.37 |
| IPPO | 64.42 ± 0.88 | 88.52 ± 1.74 | 416.93 ± 8.85 |
| A2C | 66 ± 0.6 | 93.68 ± 1.75 | 355.62 ± 9.36 |
| MaxPWFlow | 62.15 ± 0.4 | 86.48 ± 1.77 | 328.62 ± 1.81 |
| TrajectoryControl | 60.55 ± 0.46 | 84.42 ± 1.58 | 331.76 ± 1.75 |
| Trajectory Control + RL | 61.76 ± 0.43 | 86.52 ± 1.6 | 333.82 ± 1.7 |
| Cooperative Control | 59.57 ± 0.43 | 83.41 ± 1.5 | 325.25 ± 1.71 |
| Model | “Cologne-3” | “Cologne-8” | “Cologne-316” |
|---|---|---|---|
| IDQN | 57.9 ± 1.08 | 89.89 ± 2.07 | 332.15 ± 3.19 |
| IPPO | 58.25 ± 1.01 | 89.51 ± 1.98 | 406.94 ± 7.92 |
| A2C | 60.57 ± 0.9 | 95.15 ± 2.09 | 350.28 ± 8.32 |
| MaxPWFlow | 55.01 ± 0.57 | 87.69 ± 2.03 | 327.08 ± 1.85 |
| TrajectoryControl | 53.48 ± 0.7 | 85.57 ± 1.88 | 328.68 ± 1.72 |
| Trajectory Control + RL | 54.5 ± 0.52 | 88.11 ± 1.83 | 331.83 ± 1.85 |
| Cooperative Control | 52.12 ± 0.44 | 84.32 ± 1.89 | 323.96 ± 1.95 |
| Model | “Cologne-3” | “Cologne-8” | “Cologne-316” |
|---|---|---|---|
| IDQN | 7.49 ± 0.82 | 4.46 ± 0.28 | 18.2 ± 4.52 |
| IPPO | 7.57 ± 0.81 | 4.01 ± 0.14 | 101.45 ± 9.24 |
| A2C | 8.9 ± 0.67 | 7.44 ± 0.31 | 29.12 ± 9.41 |
| MaxPWFlow | 6.08 ± 0.36 | 3.18 ± 0.15 | 14.79 ± 0.75 |
| TrajectoryControl | 3.65 ± 0.4 | 0.71 ± 0.18 | 11.15 ± 0.67 |
| Trajectory Control + RL | 3.27 ± 0.34 | 0.86 ± 0.1 | 12.52 ± 1.46 |
| Cooperative Control | 3.38 ± 0.37 | 0.62 ± 0.07 | 10.76 ± 0.87 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Agafonov, A.; Yumaganov, A.; Myasnikov, V. Cooperative Control for Signalized Intersections in Intelligent Connected Vehicle Environments. Mathematics 2023, 11, 1540. https://doi.org/10.3390/math11061540
Agafonov A, Yumaganov A, Myasnikov V. Cooperative Control for Signalized Intersections in Intelligent Connected Vehicle Environments. Mathematics. 2023; 11(6):1540. https://doi.org/10.3390/math11061540
Chicago/Turabian StyleAgafonov, Anton, Alexander Yumaganov, and Vladislav Myasnikov. 2023. "Cooperative Control for Signalized Intersections in Intelligent Connected Vehicle Environments" Mathematics 11, no. 6: 1540. https://doi.org/10.3390/math11061540
APA StyleAgafonov, A., Yumaganov, A., & Myasnikov, V. (2023). Cooperative Control for Signalized Intersections in Intelligent Connected Vehicle Environments. Mathematics, 11(6), 1540. https://doi.org/10.3390/math11061540