4.1. Experimental-Setting Details
Comparison Methods and Evaluation Metrics. In this section, several single-image deraining algorithms, consisting of sequential methods (ReMAEN [
32], RESCAN [
12], and MPRNet [
16]) and multi-branch methods (DID-MDN [
40], MSPFN [
13], and PCNet [
17]), are compared with the proposed PHMNet. All comparison methods are trained with their public codes and setting parameters performed by the same dataset. Furthermore, three quality assessment metrics (peak signal-to-noise ratio (PSNR), structural similarity (SSIM), and learned perceptual image patch similarity (LPIPS) [
60]) are used to evaluate the experimental results for displaying the quality of deraining results. Here, the PSNR is used to measure the degree of image distortion. The higher the PSNR score, the less image distortion. The metric SSIM is based on three comparative measures between the restored image and ground truth, including brightness, contrast, and structure. The higher the SSIM score, the higher the image similarly. Meanwhile, the metric LPIPS is based on the perceptual loss between the restored image and the ground truth. The smaller the LPIPS score, the better the image quality.
Datasets. We construct the training dataset from dataset [
53] and the DID-MDN dataset [
40]. Our training dataset here includes 15,600 image pairs with clear and rainy images. For the testing set, we choose the test samples from [
53], including 200 heavy-rain images, named
Rain200H. Meanwhile, the common synthetic rainy dataset from DID-MDN [
40] with 1200 rainy images, named
Test1200, is also used to evaluate the deraining methods. Furthermore, we choose the real data
Real300 [
61] to evaluate the proposed PHMNet. In particular, an unpaired rain/clear dataset is collected from Gopro [
62], FLIR [
63], and the above training dataset, then used to train the pre-trained rain-classifier network about the CL loss. The unpaired dataset includes 15,560 rainy images and 15,786 clear images. After using data augmentation with this dataset, we train the pre-trained rain-classifier network, which is used to recognize the rainy or clear image. Finally, based on this pre-training classification network, we construct the latent feature-representation model for the CL loss.
Training Details. The overall PHMNet is trained in an end-to-end manner based on the PyTorch framework. To enhance the trained performance of PHMNet, we crop the image patches of size
as the new training sample. During 200 training epochs, we use Adam as the optimizing solver with
and
. Furthermore, the learning rate is set as
initially while changing by the cosine annealing strategy [
64]. Our network is performed on four RTX-2080 GPUs. The batch size is set as 12, which is set based on the validation of the experimental results. In the baseline, the number of HMMs is set as 8 in the CR stage. The parameters
and
of function (
7) are set as 2 and 0.001, respectively, while the parameters
and
of function (
8) are set as 1 and 1, respectively.
4.2. Comparison with Methods
Synthetic Datasets. We evaluate all test images from
Rain200H and
Test1200 on the compared methods and use quantitative measures (PSNR, SSIM, and LPIPS) to measure the reconstructed results, respectively. Thus, the PSNR, SSIM, and LPIPS performances are reported in
Table 1. It is noted that the proposed PHMNet outperforms other compared methods on the dataset
Rain200H and dataset
Test1200. On the dataset
Rain200H, with heavy rain distributions, our method achieves improvement about 0.53 dB on PSNR, 0.0087 on SSIM, and 0.0124 on LPIPS compared to the sequential framework ReMAEN [
32] with the second top performance. Similarly, on the other dataset
Test1200, with multiple types of rain-streak distribution, the proposed method also gets the best results. Furthermore, compared to the existing best multi-stream framework (PCNet [
17]), the proposed method has a large improvement of about 1.31 dB on PSNR, 0.0342 on SSIM, and 0.0128 on LPIPS with dataset
Test1200, further verifying the effectiveness of its feature modulated mechanism between the rain-streak layer and the rain-free layer.
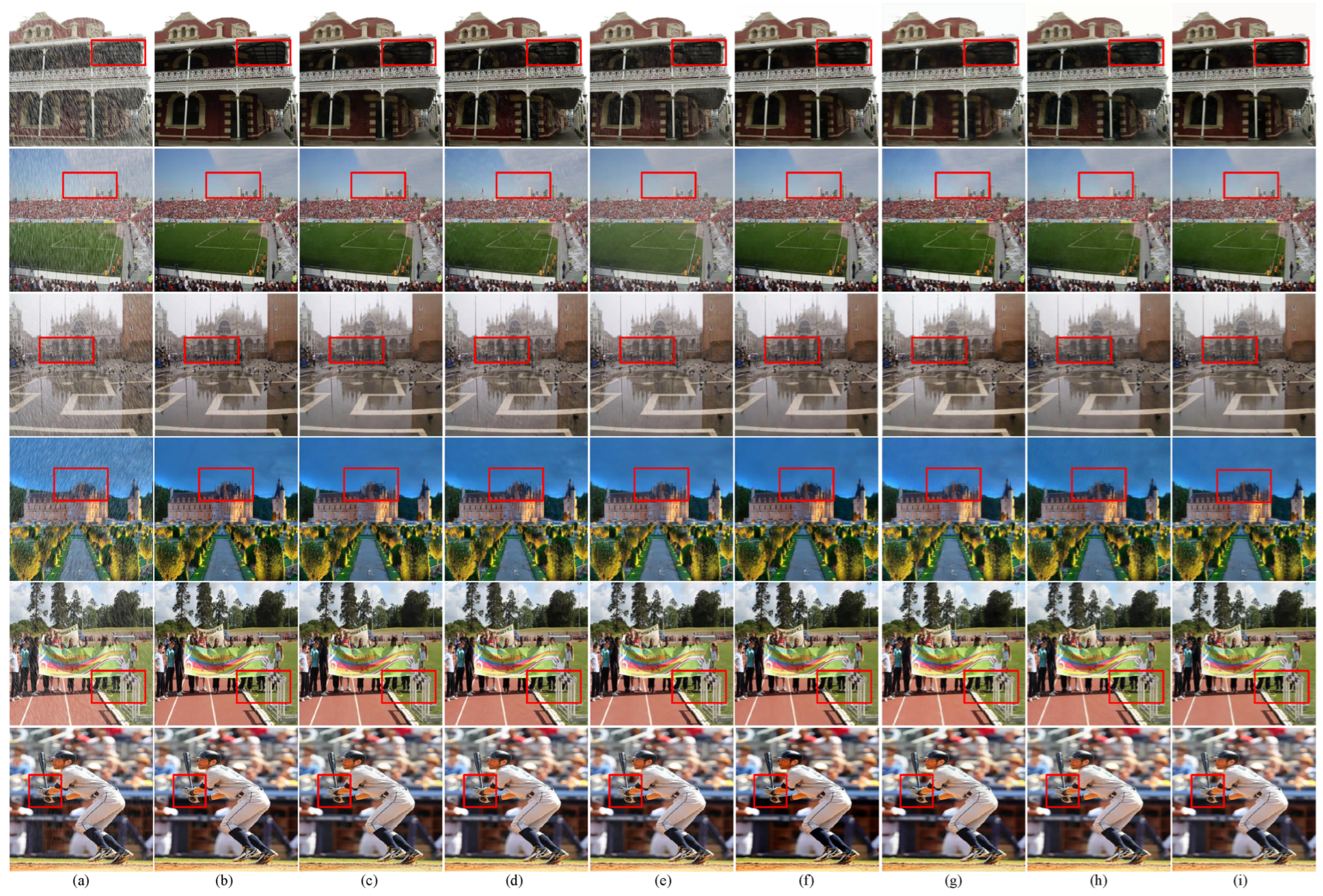
Figure 7 and
Figure 8 show several visual deraining results of different methods from the test dataset. For heavy rainy scenes, the proposed method performs favorably against other deraining methods, including the sequential frameworks and multi-stream frameworks, as shown in
Figure 7. Although the RESCAN [
12] gets high evaluation values for deraining results, there are blurry edges that affect the visual quality (
Figure 7c). As zoomed into the cloudy regions from the second and fourth rows in
Figure 7, the proposed PHMNet removes the rain streak in the sky and enhances the edge details of the cloud. Compared to other deraining methods, the proposed method successfully removes most rain streaks, enhances visibility, and lights up details in edge regions. On the other hand, for scenes with more diverse rainfall distributions, as shown in
Figure 8, due to the feature hybrid-modulation mechanism, the proposed method outperforms other multi-branch framework methods, such as DID-MDN [
40], MSPFN [
13], and PCNet [
17] on dataset
Test1200. Specifically, as shown in the first, third, and fourth rows of
Figure 8, the texture and details of the building structure damaged by rain streaks can be clearly reconstructed by the proposed PHMNet, while other methods are affected by blur and artificial ringing. Similar situations can be found by comparing the restored sky regions of the second row of
Figure 7, the hurdle regions of the fifth row of
Figure 8, and the body regions of the sixth row of
Figure 7.
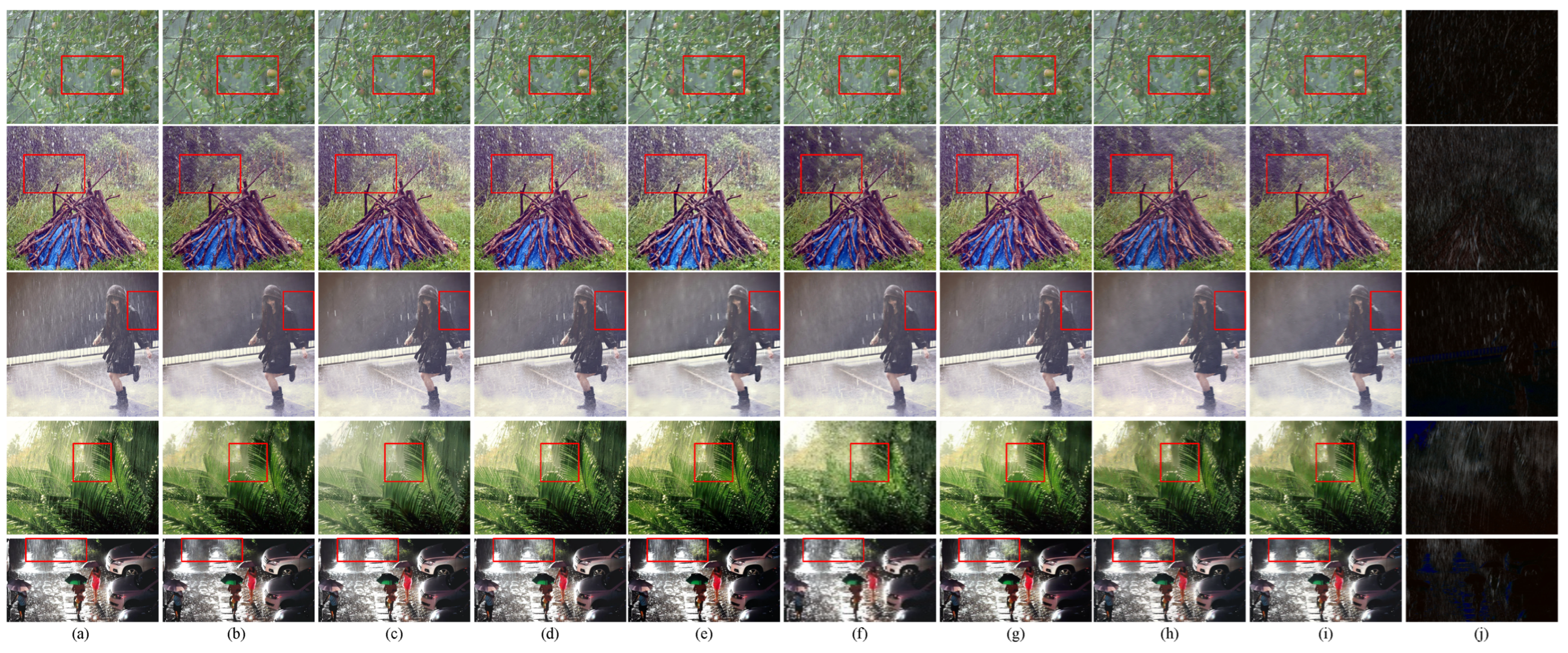
Real-world Dataset. To demonstrate the effect of the proposed method, several experiments by different methods on real-world dataset
Real300 are displayed in
Figure 9. This dataset includes more challenging rainy images with unknown degradation, which have different real-world scenes, including daytime and nighttime. Due to the lack of the corresponding ground-truth clear images, the generated deraining images are only evaluated qualitatively. Compared with other methods, the proposed PHMNet can remove the rain streaks and obtain acceptable deraining results, as shown in
Figure 9i. Our method not only removes the rain streaks and retains the shape’s edges (
Figure 9i) but also obtains the suitable rain-streak image (
Figure 9j). Most other methods cannot process this rainy image well, retaining tiny rain streaks. Specifically, for daytime scences, as shown in the first, second, and fourth rows of
Figure 9, the proposed PHMNet can remove the rain streak and reconstruct the details of the background, including branches, trunks, and leaves of a tree. For black backgrounds or nighttime scences, the deraining result from the proposed method has fewer rain streaks than that of results from other methods. In particular, the proposed method performs better than other methods, generating a clear result with few rainy streaks in the vehicle-light area, as shown in the results in the fifth row of
Figure 9.
Two Downstream Tasks. We use YOLOv5, an optimized version based on YOLOv4 [
5], to verify the image quality restored by different deraining methods in the object detection tasks. The model parameter is provided from
https://github.com/ultralytics/yolov5, accessed on 15 July 2022. Meanwhile, the MTCNN [
65] is also used to demonstrate the image quality restored by different deraining methods in the face detection tasks. For object detection tasks, the proposed method provides restored images with higher quality, which leads to less misdetection. For instance, since the restored images from MPRNet [
16] and PCNet [
17] have noticeable rainy streaks, all cars are recognized as trains or trucks, as shown in the second row of
Figure 10c,d. Furthermore, as shown in the third row of
Figure 10, the deraining image resulted from the proposed method can provide higher quality information to detect the details of two buses, while only one bus can be detected in the other deraining results.
For the face detection task, MTCNN [
65] processes the images recovered by our method with stable detection results, as shown in
Figure 11g. Although the MPRNet [
16] can yeild the deraining results for detecting all facial regions, its deraining results contain tiny rain streaks. Meanwhile, we observe that the recovered images from some deraining methods, such as RESCAN [
12] and DID-MDN [
40], are not able to detect the correct face, while the MTCNN [
65] can detect the face from the corresponding rainy image. Therefore, it is essential to construct a deraining method that can provide highly visual images and does not affect the performance of downstream tasks.
Limitations. Since the training datasets do not include the rainy type of raindrops, the proposed method can not remove the drop-like effect well, as shown in the second row of
Figure 9j. On the other hand, the loss function (
9) is constructed by the physical model (
1). However, if the low-quality image has haze, water vapor, and other degradation factors, the proposed model is hard to trained by using the loss function (
9), which would lead to unpleasant results. As shown in the second row of
Figure 11g, the area of the chair of the deraining result is unclear due to the water vapor. Therefore, future work is planned to develop the new physical model including different degradation factors.
4.3. Ablation Study
To demonstrate the contribution of various parts in PHMNet qualitatively and quantitatively, some ablation experiments trained on the Rain200H dataset are shown as follows. First, we explore the modulated mechanism of PHMNet between feature maps of rain-streak and rain-free layers. Further experiments are shown to evaluate why spatial attention is implemented in the HMM. Then, the effectiveness of each loss term is evaluated. Meanwhile, an ablation study of hyperparameters of a loss function has been provided. Finally, an additional study on finding appropriate latent-feature space to construct contrastive learning loss is presented.
Effect of Modulated Mechanism. Here, a baseline is constructed by removing the feature modulation (FM) of the proposed HMMs. This means that both the rain-free branch and the rain-streak branch of the baseline are constructed by several residual modules.
Figure 12 shows that PHMNet (HMM with FM) can achieve rapid feature modulation and extraction, leading to more meaningful features. As shown in
Figure 12b,c PHMNet’s third module (the third row of
Figure 12) extracts the outline feature of the object approximately, while the third module of baseline (the first row) has not obtained effective features. Meanwhile, PHMNet’s rain-streak branch extracts more effective spatial features of the rain streak, as shown in the fourth row of
Figure 12b,c. Furthermore,
Table 2 shows that the proposed PHMNet performs better than the baseline. In particular, the baseline results in a large decrease of 2.06 dB on PSNR, 0.0077 on SSIM, and 0.0055 on LPIPS with dataset
Rain200H, validating the decision to use the feature modulation between the rain-free branch and rain-streak branch. Thus, the proposed HMM with FM can extract more valuable features, leading to better deraining results.
Effect of the Proposed HMM. As introduced in
Section 3.3, the proposed HMM is designed by using two spatial attention units. Therefore, we compare the proposed HMM with several baseline modules to verify the effect of spatial attention units. It is noted that all baseline modules are designed by using the backbone of
Section 3.3. The baseline modules are shown as follows.
HMM-CC: This baseline module is designed by replacing all attention units of HMM with channel attention.
HMM-CS: This baseline is designed by just using channel attention to replace the 1st attention unit of HMM with channel attention.
HMM-SC: This baseline just replaces the 2nd attention unit of HMM with channel attention.
It is noted that each baseline module is used to replace the HMM of the proposed PHMNet and trained by the same training dataset and same loss terms as that of PHMNet.
Table 3 shows the metric values (PSNR/SSIM/LPIPS) of the deraining network with each baseline module and the proposed HMM. Here, the baseline HMM-SC results in a large decrease of 1.30 dB on PSNR, 0.0099 on SSIM, and 0.0134 on LPIPS with dataset
Rain200H, while the performance of the baseline HMM-SC decreases 1.14 dB on PSNR, 0.0025 on SSIM, and 0.0002 on LPIPS with dataset
Rain200H. Furthermore, the baseline HMM-CC results in a large decrease of 0.65 dB on PSNR, 0.0172 on SSIM, and 0.0096 on LPIPS with dataset
Rain200H. The results show that spatial information plays an important role in hybrid-modulating features within the HMMs, which leads to a better performance of the proposed method.
Effect of Different Loss Terms. In order to prove the effectiveness of the proposed PHMNet loss function (
7), several combinations of loss function terms are used to train PHMNet. As shown in
Table 4, the combination of different loss terms leads to consistent improvement, and the combination of all these loss terms produces the best quantitative results. In particular, after adding the loss term
to train a network with dataset
Rain200H, the network results in an improvement of 0.0068 on SSIM and 0.0144 on LPIPS compared to that of a network trained by loss term
. It demonstrates that the loss term
enhances the quality of the deraining results on the SSIM metric. Furthermore, the network trained without the loss term
with dataset
Rain200H results in a large decrease of 1.23 dB on PSNR, 0.0007 on SSIM, and 0.0007 on LPIPS. Thus, the loss term
combines the information of the input rain image and helps the proposed PHMNet obtain improvement quality of the deraining images. It is noted that the loss term
also improves the visual effect of the deraining result. The usage of the loss term
results in a large improvement of 1.1 dB on PSNR, 0.0008 on SSIM, and 0.0007 on LPIPS for dataset
Rain200H. This benefits from using the latent feature to represent space to measure the similarity and difference among the rainy image, restored image, and ground truth.
Effect of Different Hyperparameters. Taking the dataset
Rain200H as an example, we explore the performance of the proposed method with different hyperparameters of loss function after using various image quality measurement methods (PSNR, SSIM, and LPIPS). Here, we focus mainly on two hyperparameters of function (
7), including
and
.
On the one hand, hyperparameter
is employed mainly to balance the influence of physical model loss terms. Here,
is set from 0.1 to 2. As shown in
Table 5, the performance of the proposed PHMNet is improving, while the value of
is increasing. It is noted that the proposed PHMNet has a very similar performance when
is set to 1 or 2. Therefore,
is set to 2 in this paper. On the other hand, hyperparameter
is used to constrain the importance of a contrastive-learning loss term. Here,
is set from
to
. As shown in
Table 6, the proposed PHMNet can achieve the best performance when
is set to
. Furthermore, the performance of the proposed method would be reduced when
is set to a large term, such as
. Therefore,
is set to 2 in this paper.
Rain Classifier Network for Contrastive-learning Loss. Existing image restoration methods [
58] only construct the latent feature representation space based on a pre-trained VGG. In this paper, we construct the latent feature space as follows. Firstly, we construct a rain-classifier network based on inception network [
59] for discriminating whether the input image is rainy. Then, we lose the last classified layer of the rain-classifier network and fix the other parameter as the latent feature-representation model after training the RC net. Finally, we construct the contrastive-learning loss as shown in Equation (
10).
Table 7 shows that contrastive-learning loss based on the proposed rain classifier network improves the performance of the proposed PHMNet. As shown in
Table 7, the usage of a rain classifier network for constructing contrastive-learning loss results in an excellent improvement of 1.57 dB on PSNR, 0.0085 on SSIM, and 0.0066 on LPIPS for dataset
Rain200H. This means that the rain classifier network can provide stronger supervising information on rain streaks and background to train the proposed method, resulting in better image quality.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}