
A Continuous-Time Urn Model for a System of Activated Particles


{kind=link}
Abstract
:1. Introduction
1.1. Physical Motivation
- —
- Activated particle systems:
- Chemical reactions: A chemical reaction where particles change into an active state and start new reactions could be described by the model.
- Biological systems: This model can be used to simulate biological system activation processes, such as the activation of enzymes or signaling pathways.
- —
- Stochastic behavior:
- Random activation events: Particle activation is a stochastic process that is impacted by random events in many physical systems. Randomness can be incorporated into the modeling of activation processes using the continuous-time urn model.
- Noise in physical systems: The model might be used to study how noise or fluctuations in a physical system can impact the activation and deactivation of particles.
- —
- Statistical physics:
- Phase transitions: The model can be connected to the study of phase transitions in statistical physics, where particles undergo a sudden change in behavior or state.
- Thermodynamic equilibrium: Understanding how systems of activated particles reach equilibrium states and the associated thermodynamics.
1.2. Examples
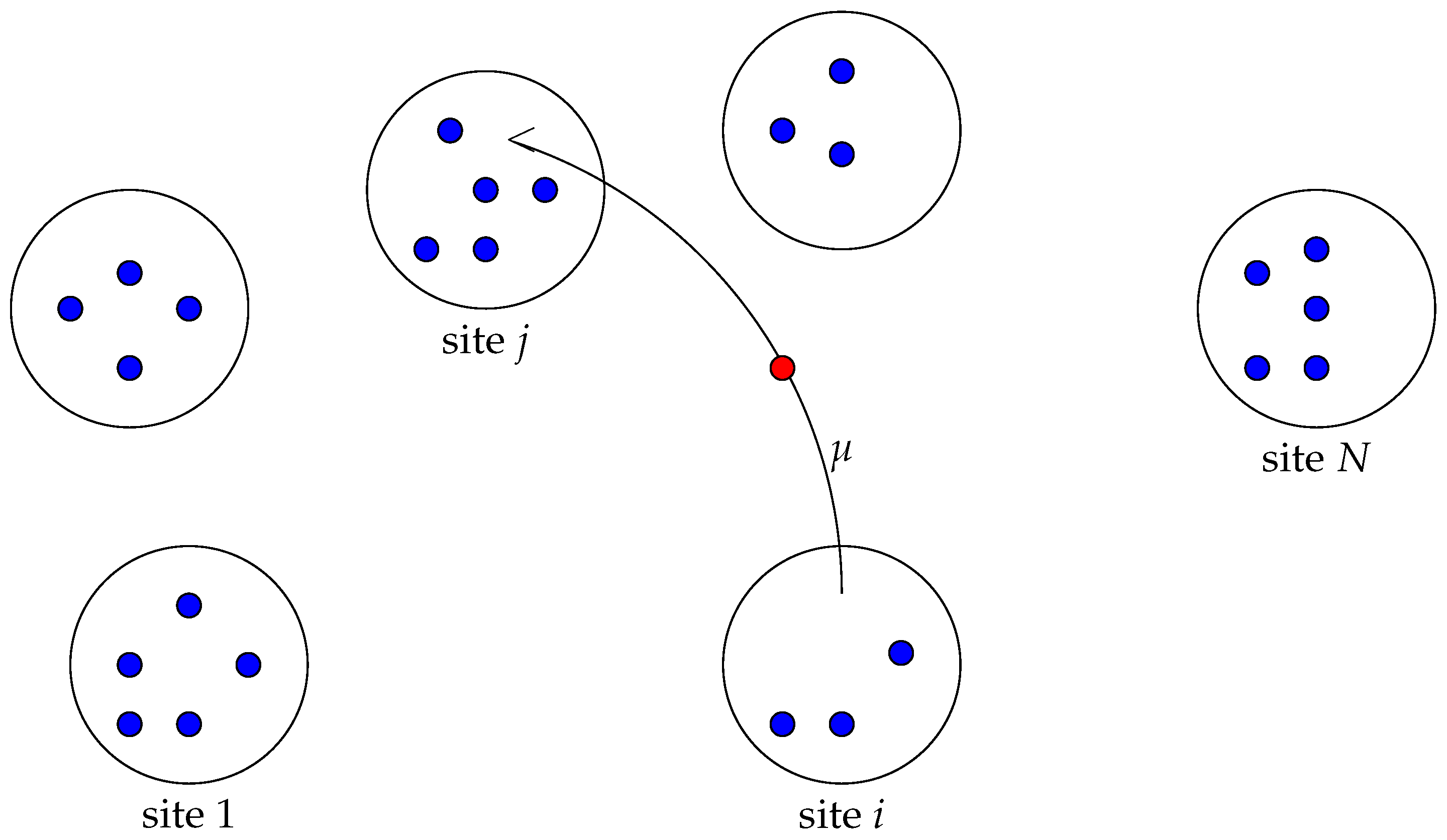
1.3. Continuous-Time Pólya Interpretation
- –
- Activation of a particle on standby at a given site: this concerns a ball of color , which will inevitably be replaced by a ball of color 0.
- –
- Standby mode of a particle initially on the move: this concerns a ball of color 0 which will necessarily be replaced by a ball of color j chosen at random from among colors .
1.4. Related Works
1.5. Outline
2. Average Analysis
- –
- A ball of color 0 if ;
- –
- ball of color j chosen at random among colors if .
2.1. Active Particles or Balls of Type 0
- –
- Note that the average number of balls of color 0 does not depend on the parameter N. Indeed, for balls of color 0 (active particles), the other colors do not differ in terms of behavior and are, therefore, not distinguishable.
- –
- –
- For the trivial case (one ball, two colors), we obtain for all :
2.2. Inactive Particles or Balls of Type 1
3. Distribution Analysis
3.1. Active Particles or Balls of Type 0
3.2. Inactive Particles or Balls of Type 1
4. Discussion
- By in the asymptotic distribution of ;
- By in the asymptotic distribution of .
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Popov, S.Y. Frogs and some other interacting random walks models. In Proceedings of the Discrete Mathematics & Theoretical Computer Science, 4th International Conference, DMTCS 2003, Dijon, France, 7–12 July 2003. [Google Scholar]
- Giakkoupis, G.; Mallmann-Trenn, F.; Saribekyan, H. How to spread a rumor: Call your neighbors or take a walk? In Proceedings of the 2019 ACM Symposium on Principles of Distributed Computing, Toronto, ON, Canada, 29 July–2 August 2019; pp. 24–33. [Google Scholar]
- Benjamini, I.; Fontes, L.R.; Hermon, J.; Machado, F.P. On an epidemic model on finite graphs. Ann. Appl. Probab. 2020, 30, 208–258. [Google Scholar] [CrossRef]
- Saintillan, D.; Shelley, M.J. Emergence of coherent structures and large-scale flows in motile suspensions. J. R. Soc. Interface 2012, 9, 571–585. [Google Scholar] [CrossRef] [PubMed]
- Ehrenfest, P.; Ehrenfest, T. Über zwei bekannte Einwände gegen das Boltzmannsche H-Theorem. Physik 1907, 8, 311–314. [Google Scholar]
- Balaji, S.; Mahmoud, H.M.; Watanabe, O. Distributions in the Ehrenfest process. Stat. Probab. Lett. 2006, 76, 666–674. [Google Scholar] [CrossRef]
- Hoffman, C.; Johnson, T.; Junge, M. From transience to recurrence with Poisson tree frogs. Ann. Appl. Probab. 2016, 26, 1620–1635. [Google Scholar] [CrossRef]
- Hoffman, C.; Johnson, T.; Junge, M. Recurrence and transience for the frog model on trees. Ann. Probab. 2017, 45, 2826–2854. [Google Scholar] [CrossRef]
- Kosygina, E.; Zerner, M.P. A zero-one law for recurrence and transience of frog processes. Probab. Theory Relat. Fields 2017, 168, 317–346. [Google Scholar] [CrossRef]
- Fricker, C.; Gast, N. Incentives and redistribution in homogeneous bike-sharing systems with stations of finite capacity. EURO J. Transp. Logist. 2016, 5, 261–291. [Google Scholar] [CrossRef]
- Fricker, C.; Tibi, D. Equivalence of ensembles for large vehicle-sharing models. Ann. Appl. Probab. 2017, 27, 883–916. [Google Scholar] [CrossRef]
- Fricker, C.; Gast, N.; Mohamed, H. Mean field analysis for inhomogeneous bike sharing systems. In Proceedings of the 23rd International Meeting on Probabilistic, Combinatorial, and Asymptotic Methods for the Analysis of Algorithms (AofA’12), Montreal, QC, Canada, 1 January 2012. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aguech, R.; Mohamed, H. A Continuous-Time Urn Model for a System of Activated Particles. Mathematics 2023, 11, 4967. https://doi.org/10.3390/math11244967
Aguech R, Mohamed H. A Continuous-Time Urn Model for a System of Activated Particles. Mathematics. 2023; 11(24):4967. https://doi.org/10.3390/math11244967
Chicago/Turabian StyleAguech, Rafik, and Hanene Mohamed. 2023. "A Continuous-Time Urn Model for a System of Activated Particles" Mathematics 11, no. 24: 4967. https://doi.org/10.3390/math11244967
APA StyleAguech, R., & Mohamed, H. (2023). A Continuous-Time Urn Model for a System of Activated Particles. Mathematics, 11(24), 4967. https://doi.org/10.3390/math11244967