
Extended Sliding Mode Observer-Based Output Feedback Control for Motion Tracking of Electro-Hydrostatic Actuators



Abstract
:1. Introduction
- (1)
- For the first time, an ESMO based on a system model was constructed to estimate immeasurable system states, i.e., angular velocity and load pressure, and lumped matched disturbance in the pressure dynamics caused by parameter deviations and modeling errors.
- (2)
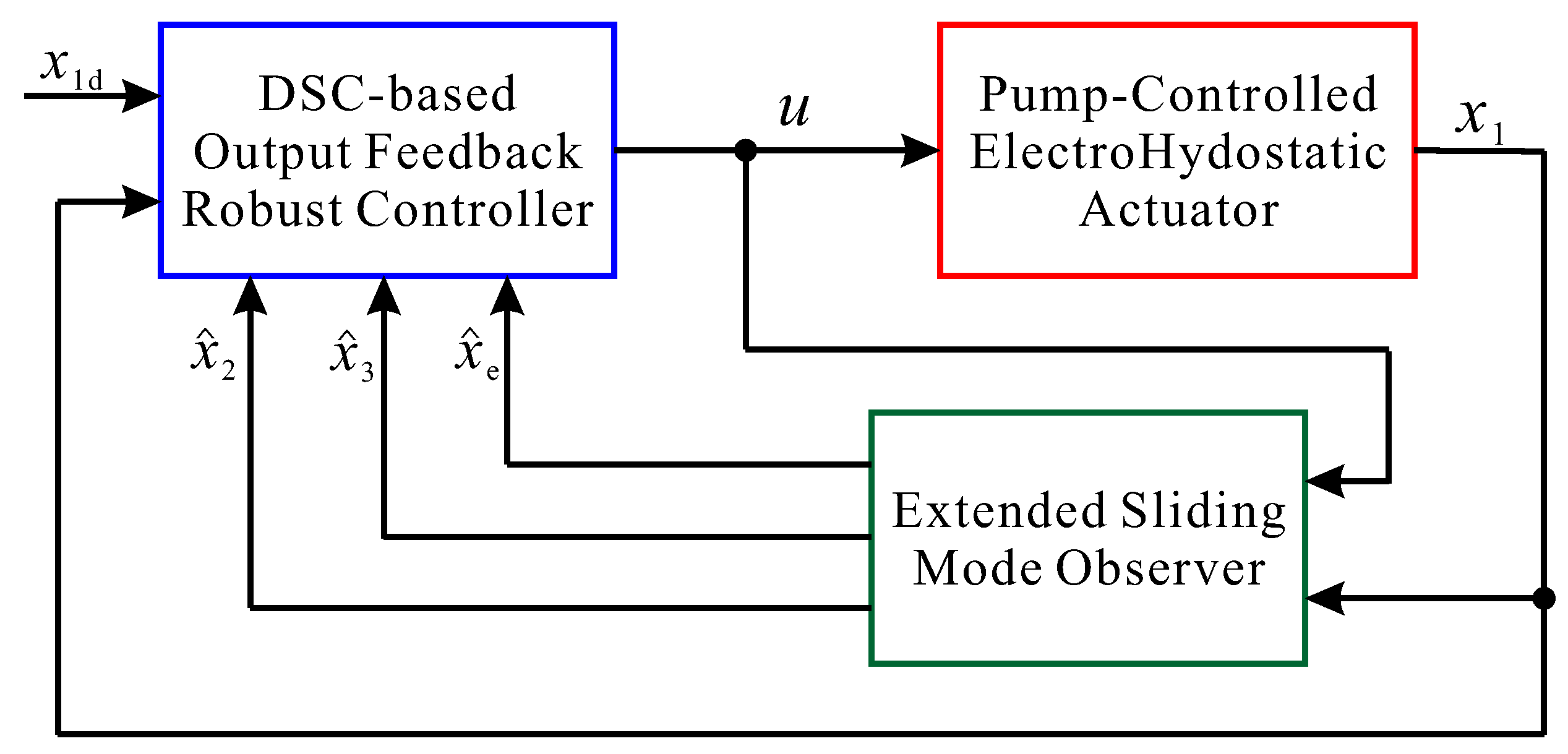
- Based on the designed ESMO, a novel output feedback robust control scheme using the backstepping control framework and dynamic surface control technique is synthesized for the motion-tracking problem of the studied EHA.
- (3)
- The stability of the ESMO and the overall closed-loop system is theoretically verified by the Lyapunov theory. Experiments on the real test bench are conducted to illustrate the practicability and advantage of the suggested controller in comparison with some reference methods under various working scenarios.
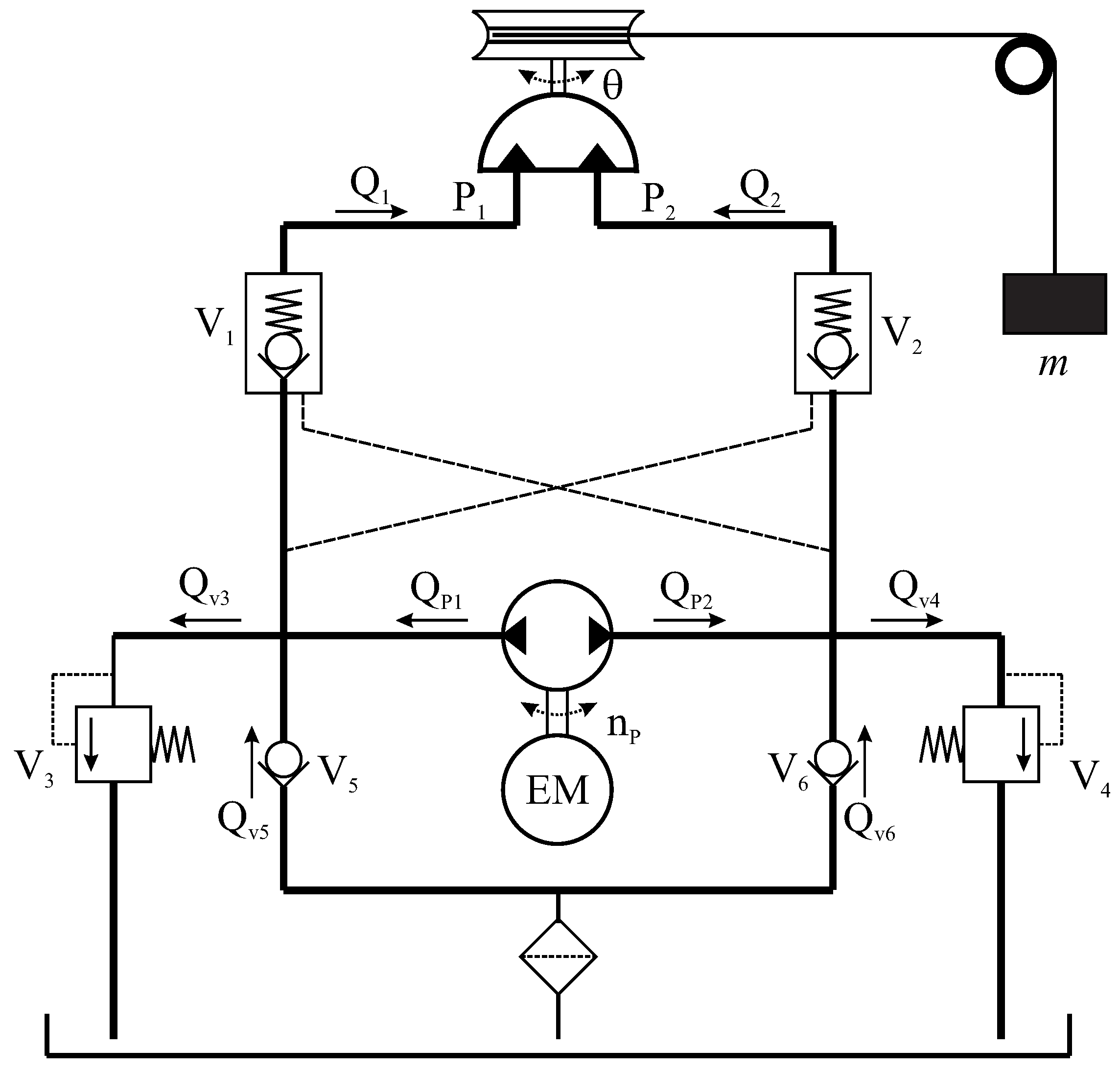
2. System Modeling and Problem Statement
3. Observer-Based Output Feedback Control Design
3.1. Extended Sliding Mode Observer
3.2. Observer-Based Control Design
3.3. Closed-Loop Stability Analysis
4. Experiment Validation
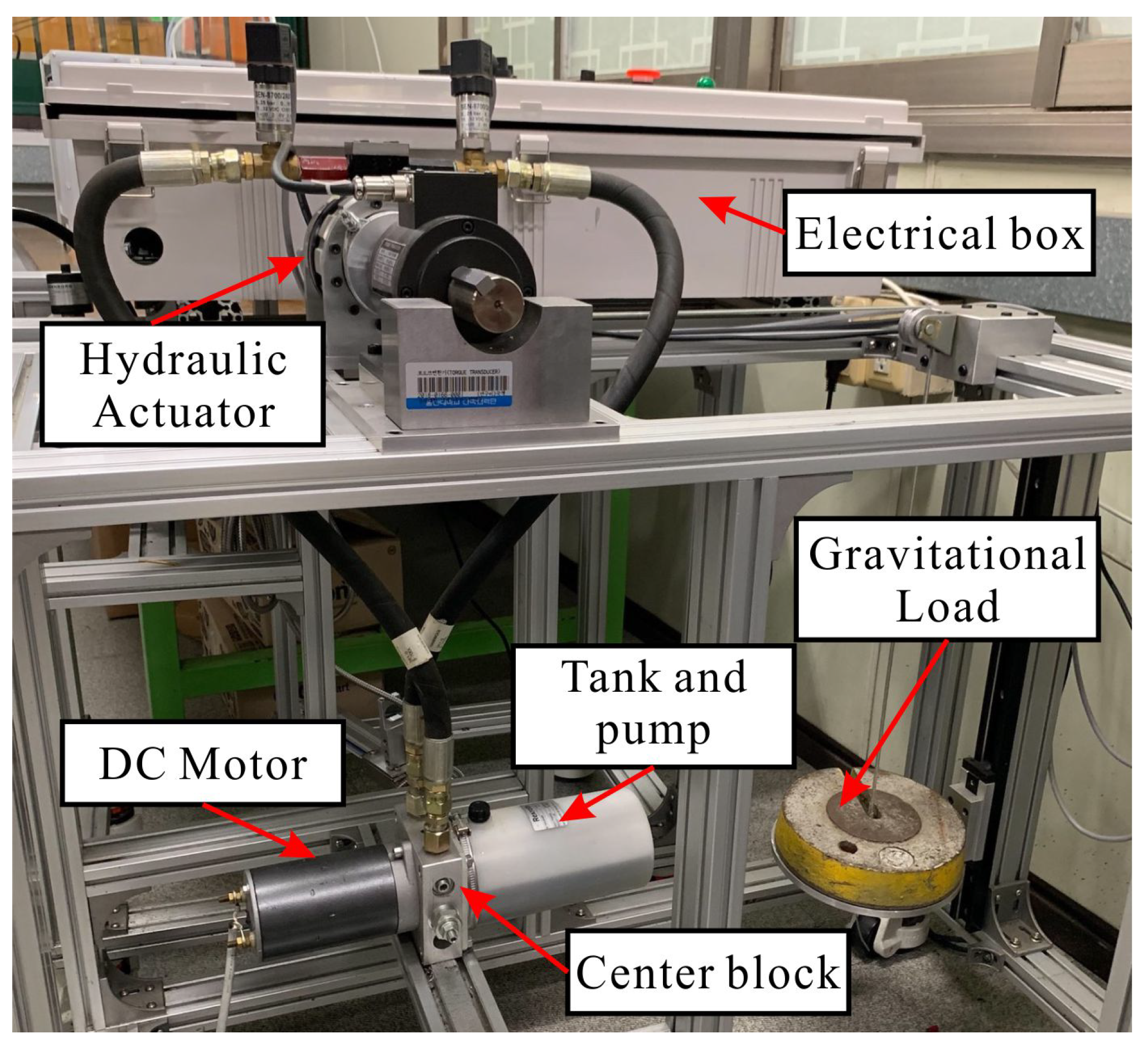
4.1. Experiment Setup
- (1)
- ESMOBC: The proposed controller, whose control gains are chosen as , , . The time constants of the low-pass filters are and the observer bandwidth is .
- (2)
- PID: Proportional-derivative-integral controller (PID), whose controller gains are ultimately selected as , , and . The larger gains would cause the closed-loop system to be unstable due to measurement noise and unmodeled dynamics.
- (3)
- PIDVFF [6]: Velocity feed-forward-based proportional-derivative-integral controller (PIDVFF), whose PID gains are chosen as the same as the above PID controller, and the velocity feed-forward coefficient is selected as .
- (4)
- STW [41]: Super-twisting-based controller, whose structure is designed aswhere and .
- (1)
- Maximal tracking error is defined aswhere N is the number of samples that are used for evaluation.
- (2)
- Average tracking error is computed as
- (3)
- The standard deviation of the tracking errors is formulated as
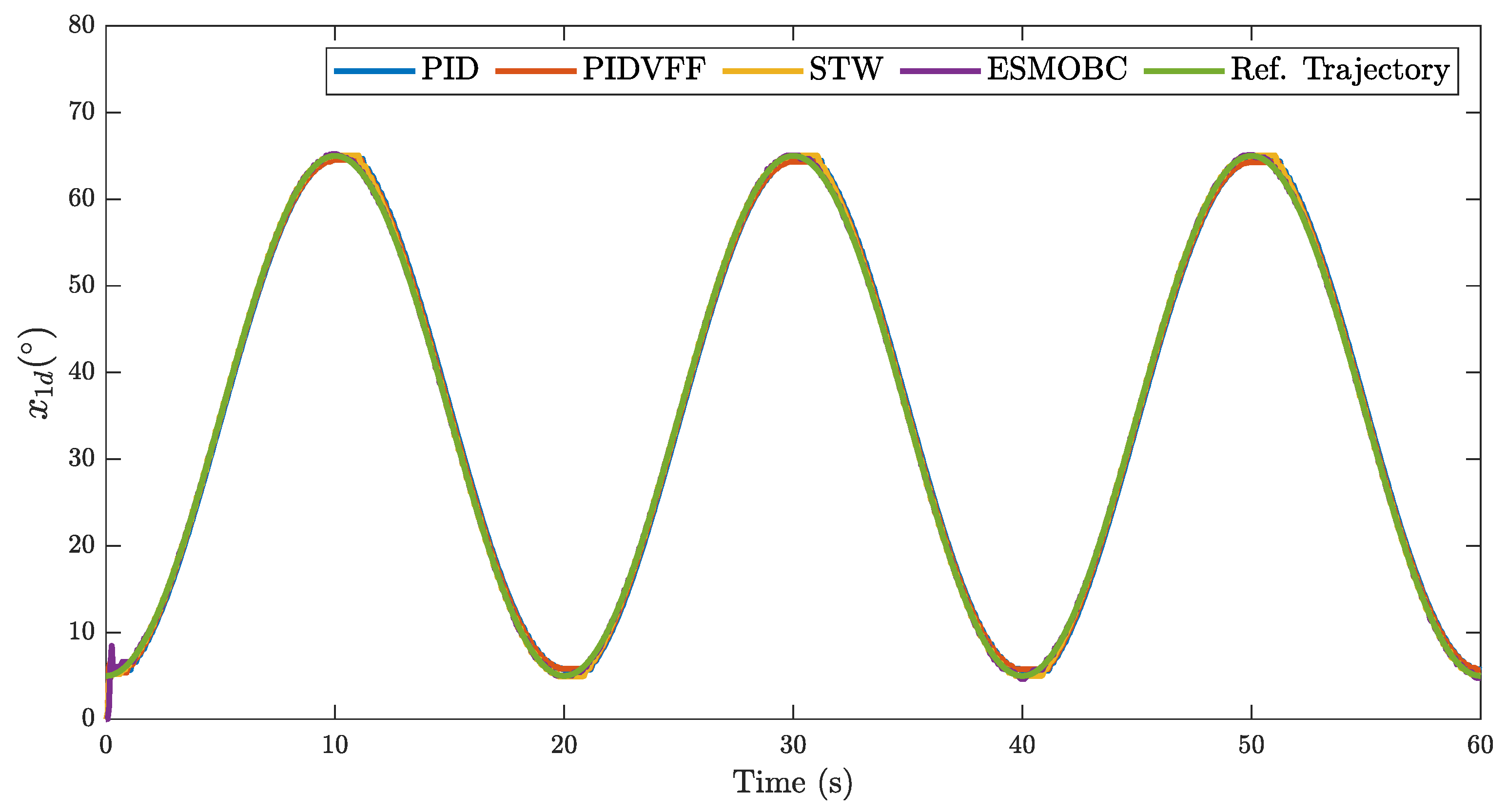
4.2. Experiment Results
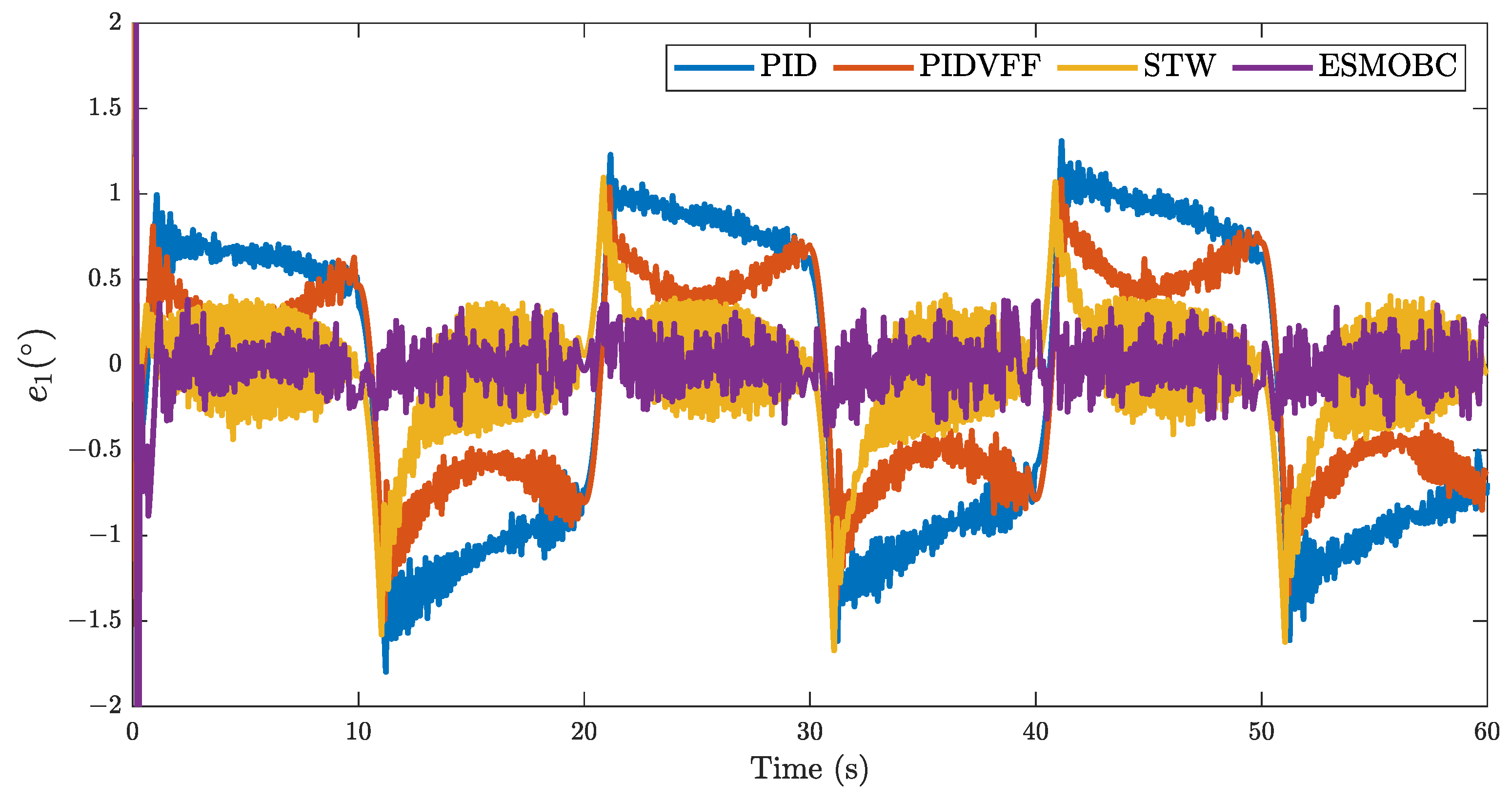
4.2.1. Slow-Motion Reference Trajectory under Light-Load Condition
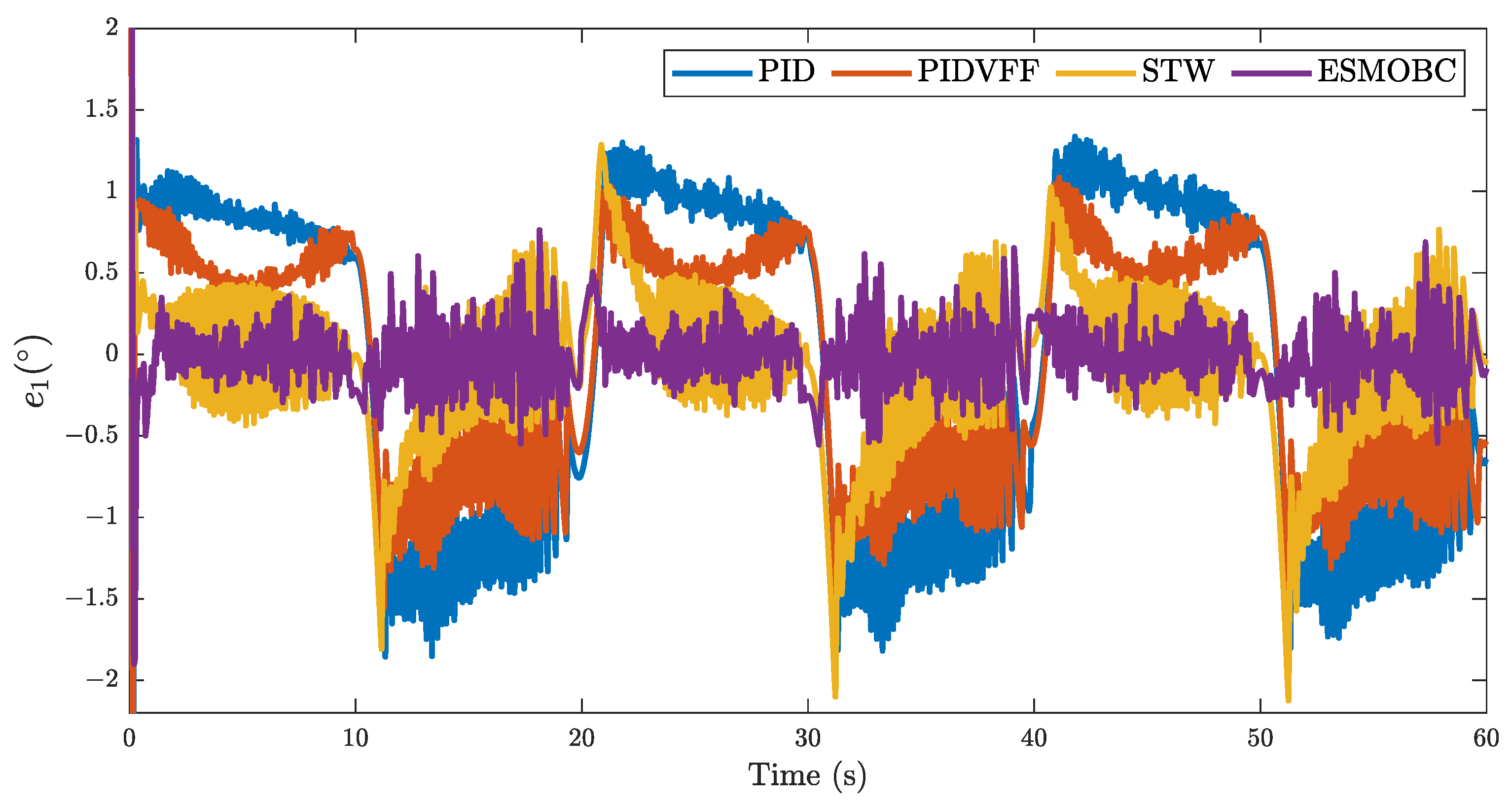
4.2.2. Slow-Motion Reference Trajectory under Heavy-Load Condition
4.2.3. Fast-Motion Reference Trajectory under Light-Load Condition
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| BSC | Backstepping Control |
| DSC | Dynamic Surface Control |
| EHS | Electro-hydraulic System |
| EHA | Electro-Hydrostatic Actuator |
| PID | Proportional-Integral-Derivative |
| PIDVFF | Velocity FeedForward-based PID |
| SMC | Sliding Mode Control |
| STA | Super-Twisting Algorithm |
| DOB | Disturbance Observer |
| ESO | Extended State Observer |
| SMO | Sliding Mode Observer |
| ESMO | Extended Sliding Mode Observer |
| UUB | Ultimately Uniformly Bounded |
References
- Nguyen, M.H.; Ahn, K.K. A Novel Trajectory Adjustment Mechanism-Based Prescribed Performance Tracking Control for Electro-Hydraulic Systems Subject to Disturbances and Modeling Uncertainties. Appl. Sci. 2022, 12, 6034. [Google Scholar] [CrossRef]
- Qin, T.; Li, Y.; Quan, L.; Yang, L. An Adaptive Robust Impedance Control Considering Energy-Saving of Hydraulic Excavator Boom and Stick Systems. IEEE/ASME Trans. Mechatronics 2022, 27, 1928–1936. [Google Scholar] [CrossRef]
- Chiang, M.-H. A novel pitch control system for a wind turbine driven by a variable-speed pump-controlled hydraulic servo system. Mechatronics 2011, 21, 753–761. [Google Scholar] [CrossRef]
- Hänninen, H.; Minav, T.; Pietola, M. Replacing a Constant Pressure Valve Controlled System with a Pump Controlled System. In Proceedings of the BATH/ASME 2016 Symposium on Fluid Power and Motion Control, Bath, UK, 7–9 September 2016. V001T01A039. ASME. [Google Scholar] [CrossRef]
- Nguyen, M.H.; Dao, H.V.; Ahn, K.K. Extended sliding mode observer-based high-accuracy motion control for uncertain electro-hydraulic systems. Int. J. Robust Nonlinear Control 2023, 33, 1351–1370. [Google Scholar] [CrossRef]
- Nguyen, M.H.; Ahn, K.K. Output Feedback Robust Tracking Control for a Variable-Speed Pump-Controlled Hydraulic System Subject to Mismatched Uncertainties. Mathematics 2023, 11, 1783. [Google Scholar] [CrossRef]
- Sun, M.; Ouyang, X.; Mattila, J.; Chen, Z.; Yang, H.; Liu, H. Lightweight Electrohydrostatic Actuator Drive Solution for Exoskeleton Robots. IEEE/ASME Trans. Mechatronics 2022, 27, 4631–4642. [Google Scholar] [CrossRef]
- Staman, K.; Veale, A.J.; Kooij, H.v.d. Design, Control and Evaluation of the Electro-Hydrostatic Actuator, PREHydrA, for Gait Restoration Exoskeleton Technology. IEEE Trans. Med Robot. Bionics 2021, 3, 156–165. [Google Scholar] [CrossRef]
- Shang, Y.; Li, X.; Qian, H.; Wu, S.; Pan, Q.; Huang, L.; Jiao, Z. A Novel Electro Hydrostatic Actuator System with Energy Recovery Module for More Electric Aircraft. IEEE Trans. Ind. Electron. 2020, 67, 2991–2999. [Google Scholar] [CrossRef]
- Zhang, J.; Li, Y.; Xu, B.; Pan, M.; Chao, Q. Experimental study of an insert and its influence on churning losses in a high-speed electro-hydrostatic actuator pump of an aircraft. Chin. J. Aeronaut. 2019, 32, 2028–2036. [Google Scholar] [CrossRef]
- Zhu, T.; Xie, H.; Yang, H. Design and tracking control of an electro-hydrostatic actuator for a disc cutter replacement manipulator. Autom. Constr. 2022, 142, 104480. [Google Scholar] [CrossRef]
- Tessari, F.; Galluzzi, R.; Tonoli, A.; Amati, N.; Michieli, L.D.; Laffranchi, M. Knee prosthesis powered by a fully integrated and highly back-drivable electro-hydrostatic actuator. Mechatronics 2023, 91, 102972. [Google Scholar] [CrossRef]
- Helian, B.; Chen, Z.; Yao, B. Precision Motion Control of a Servomotor-Pump Direct-Drive Electrohydraulic System with a Nonlinear Pump Flow Mapping. IEEE Trans. Ind. Electron. 2020, 67, 8638–8648. [Google Scholar] [CrossRef]
- Helian, B.; Chen, Z.; Yao, B.; Lyu, L.; Li, C. Accurate Motion Control of a Direct-Drive Hydraulic System with an Adaptive Nonlinear Pump Flow Compensation. IEEE/ASME Trans. Mechatronics 2021, 26, 2593–2603. [Google Scholar] [CrossRef]
- Li, C.; Lyu, L.; Helian, B.; Chen, Z.; Yao, B. Precision Motion Control of an Independent Metering Hydraulic System with Nonlinear Flow Modeling and Compensation. IEEE Trans. Ind. Electron. 2022, 69, 7088–7098. [Google Scholar] [CrossRef]
- Guo, K.; Li, M.; Shi, W.; Pan, Y. Adaptive Tracking Control of Hydraulic Systems with Improved Parameter Convergence. IEEE Trans. Ind. Electron. 2022, 69, 7140–7150. [Google Scholar] [CrossRef]
- Huang, S.; Tan, K.K. Intelligent Friction Modeling and Compensation Using Neural Network Approximations. IEEE Trans. Ind. Electron. 2012, 59, 3342–3349. [Google Scholar] [CrossRef]
- Feng, H.; Song, Q.; Ma, S.; Ma, W.; Yin, C.; Cao, D.; Yu, H. A new adaptive sliding mode controller based on the RBF neural network for an electro-hydraulic servo system. ISA Trans. 2022, 129, 472–484. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, M.H.; Dao, H.V.; Ahn, K.K. Adaptive Robust Position Control of Electro-Hydraulic Servo Systems with Large Uncertainties and Disturbances. Appl. Sci. 2022, 12, 794. [Google Scholar] [CrossRef]
- Yao, Z.; Yao, J.; Sun, W. Adaptive RISE Control of Hydraulic Systems with Multilayer Neural-Networks. IEEE Trans. Ind. Electron. 2019, 66, 8638–8647. [Google Scholar] [CrossRef]
- Won, D.; Kim, W.; Shin, D.; Chung, C.C. High-Gain Disturbance Observer-Based Backstepping Control with Output Tracking Error Constraint for Electro-Hydraulic Systems. IEEE Trans. Control Syst. Technol. 2015, 23, 787–795. [Google Scholar] [CrossRef]
- Won, D.; Kim, W. Disturbance observer based backstepping for position control of electro-hydraulic systems. Int. J. Control Autom. Syst. 2015, 13, 488–493. [Google Scholar] [CrossRef]
- Nguyen, M.H.; Dao, H.V.; Ahn, K.K. Active Disturbance Rejection Control for Position Tracking of Electro-Hydraulic Servo Systems under Modeling Uncertainty and External Load. Actuators 2021, 10, 20. [Google Scholar] [CrossRef]
- Guo, Q.; Yin, J.-m.; Yu, T.; Jiang, D. Coupled-disturbance-observer-based position tracking control for a cascade electro-hydraulic system. ISA Trans. 2017, 68, 367–380. [Google Scholar] [CrossRef] [PubMed]
- Razmjooei, H.; Palli, G.; Nazari, M. Disturbance observer-based nonlinear feedback control for position tracking of electro-hydraulic systems in a finite time. Eur. J. Control 2022, 67, 100659. [Google Scholar] [CrossRef]
- Luenberger, D. An introduction to observers. IEEE Trans. Autom. Control 1971, 16, 596–602. [Google Scholar] [CrossRef]
- Luenberger, D. Observers for multivariable systems. IEEE Trans. Autom. Control 1966, 11, 190–197. [Google Scholar] [CrossRef]
- Han, J. From PID to Active Disturbance Rejection Control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Guo, B.-Z.; Zhao, Z.-l. On the convergence of an extended state observer for nonlinear systems with uncertainty. Syst. Control Lett. 2011, 60, 420–430. [Google Scholar] [CrossRef]
- Ran, M.; Li, J.; Xie, L. A new extended state observer for uncertain nonlinear systems. Automatica 2021, 131, 109772. [Google Scholar] [CrossRef]
- Li, S.; Yang, J.; Chen, W.H.; Chen, X. Generalized Extended State Observer Based Control for Systems with Mismatched Uncertainties. IEEE Trans. Ind. Electron. 2012, 59, 4792–4802. [Google Scholar] [CrossRef]
- Xiong, S.; Wang, W.; Liu, X.; Chen, Z.; Wang, S. A novel extended state observer. ISA Trans. 2015, 58, 309–317. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Gao, Z. A comparison study of advanced state observer design techniques. In Proceedings of the 2003 American Control Conference, Denver, CO, USA, 4–6 June 2003; Volume 6, pp. 4754–4759. [Google Scholar] [CrossRef]
- Ke, D.; Wang, F.; He, L.; Li, Z. Predictive Current Control for PMSM Systems Using Extended Sliding Mode Observer with Hurwitz-Based Power Reaching Law. IEEE Trans. Power Electron. 2021, 36, 7223–7232. [Google Scholar] [CrossRef]
- Yu, J.; Sun, Y.; Lin, W.; Li, Z. Fault-tolerant control for descriptor stochastic systems with extended sliding mode observer approach. IET Control Theory Appl. 2017, 11, 1079–1087. [Google Scholar] [CrossRef]
- Yao, J.; Jiao, Z.; Ma, D. Extended-state-observer-based output feedback nonlinear robust control of hydraulic systems with backstepping. IEEE Trans. Ind. Electron. 2014, 61, 6285–6293. [Google Scholar] [CrossRef]
- Xu, Z.; Sun, C.; Hu, X.; Liu, Q.; Yao, J. Barrier Lyapunov Function-Based Adaptive Output Feedback Prescribed Performance Controller for Hydraulic Systems with Uncertainties Compensation. IEEE Trans. Ind. Electron. 2023, 70, 12500–12510. [Google Scholar] [CrossRef]
- Yang, X.; Yao, J.; Deng, W. Output feedback adaptive super-twisting sliding mode control of hydraulic systems with disturbance compensation. ISA Trans. 2021, 109, 175–185. [Google Scholar] [CrossRef] [PubMed]
- Xu, Z.; Deng, W.; Shen, H.; Yao, J. Extended-State-Observer-Based Adaptive Prescribed Performance Control for Hydraulic Systems with Full-State Constraints. IEEE/ASME Trans. Mechatronics 2022, 27, 5615–5625. [Google Scholar] [CrossRef]
- Xu, Z.; Qi, G.; Liu, Q.; Yao, J. ESO-based adaptive full state constraint control of uncertain systems and its application to hydraulic servo systems. Mech. Syst. Signal Process. 2022, 167, 108560. [Google Scholar] [CrossRef]
- Rivera, J.; Garcia, L.; Mora, C.; Raygoza, J.J.; Ortega, S. Super-twisting sliding mode in motion control systems. Sliding Mode Control 2011, 1, 237–254. [Google Scholar]
- Utkin, V. On Convergence Time and Disturbance Rejection of Super-Twisting Control. IEEE Trans. Autom. Control 2013, 58, 2013–2017. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Notation | Value | SI Unit |
|---|---|---|---|
| Moment of inertia of the actuator | |||
| Hydraulic actuator displacement | |||
| Viscous friction coefficient of the actuator | 10 | ||
| Coulomb friction coefficient of the actuator | 10 | ||
| Total leakage coefficient | |||
| Effective bulk modulus of the hydraulic oil | |||
| Hydraulic pump displacement | |||
| Initial control volume of the forward chamber | |||
| Initial control volume of the reverse chamber |
| Controller | |||
|---|---|---|---|
| PID Controller | |||
| PIDVFF Controller | |||
| STW Controller | |||
| ESMOBC Controller |
| Controller | |||
|---|---|---|---|
| PID Controller | |||
| PIDVFF Controller | |||
| STW Controller | |||
| ESMOBC Controller |
| Controller | |||
|---|---|---|---|
| PID Controller | |||
| PIDVFF Controller | |||
| STW Controller | |||
| ESMOBC Controller |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, M.H.; Ahn, K.K. Extended Sliding Mode Observer-Based Output Feedback Control for Motion Tracking of Electro-Hydrostatic Actuators. Mathematics 2023, 11, 4324. https://doi.org/10.3390/math11204324
Nguyen MH, Ahn KK. Extended Sliding Mode Observer-Based Output Feedback Control for Motion Tracking of Electro-Hydrostatic Actuators. Mathematics. 2023; 11(20):4324. https://doi.org/10.3390/math11204324
Chicago/Turabian StyleNguyen, Manh Hung, and Kyoung Kwan Ahn. 2023. "Extended Sliding Mode Observer-Based Output Feedback Control for Motion Tracking of Electro-Hydrostatic Actuators" Mathematics 11, no. 20: 4324. https://doi.org/10.3390/math11204324
APA StyleNguyen, M. H., & Ahn, K. K. (2023). Extended Sliding Mode Observer-Based Output Feedback Control for Motion Tracking of Electro-Hydrostatic Actuators. Mathematics, 11(20), 4324. https://doi.org/10.3390/math11204324