

Data Assimilation for Agent-Based Models




Abstract
:1. Introduction
2. Method, Scope, and Inclusion Criteria
3. Traditional Crowd Monitoring Systems
4. Data Assimilation: Integrating Real-Time Data with Simulation Engine
4.1. Dynamic Data Driven Simulation: Data Assimilation Method
4.2. DA for Agent-Based Pedestrian/Passenger Simulations
4.3. Bayes Filters
4.4. Particle Filter
4.5. Kalman Filter
4.5.1. Unscented Kalman Filter (UKF)
4.5.2. Ensemble Kalman Filter
5. Relevant Fields
- Tracking and predicting pedestrian trajectories.
- Occupancy estimation in smart buildings.
- Integration of machine learning and data assimilation, often referred to as “data learning” [82].
- Discrete choice models.
5.1. Detecting and Tracking Using Filtering Techniques
5.2. Occupancy Estimation
5.3. Data-Driven Dynamic Systems
- Machine learning-based methods, which largely operate within a black-box framework.
- Analytical approaches that strive to derive the governing equations of the dynamical system.
5.4. Discrete Choice Models
6. Bridging Machine Learning and Data Assimilation: A Case Study on Particle Filters
6.1. Probabilistically Approximate Correct (PAC) Framework
6.2. Particle Filter Derivation
6.3. The Concept of Covering Number in Particle Filters
6.4. Online Learning and Its Implications for Particle Filtering
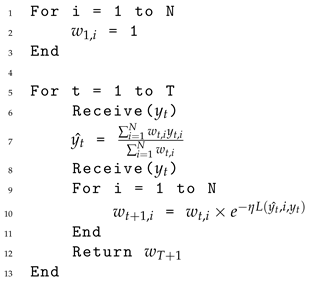
| Listing 1. EWA algorithm |
 |
7. Results and Discussion
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| DDDAS | Dynamic Data-Driven Application Simulation |
| SMC | Sequential Monte Carlo |
| DDDS | Dynamic Data-Driven Simulation |
| DA | Data Assimilation |
| ABM | Agent Based Model |
| ABDA | Agent-based Data Assimilation |
| ML | Machine Learning |
| SINDy | Sparse Identification of Nonlinear Dynamics |
| PF | Particle Filter |
| KF | Kalman Filter |
| CS | Compressed Sensing |
| MLP | Multi-layer Perceptron |
| VarDA | Variational Data Assimilation |
| CMS | Crowd Monitoring System |
| SIR | Sequential Importance Resampling |
| HMM | Hidden Markov Model |
| SBPF | Smart Beam Particle Filter |
| EnKF | Ensemble Kalman Filter |
| EKF | Extended Kalman Filter |
| RJUKF | Reversed Jump Unscented Kalman Filter |
| CCTV | Closed Circuit Television |
| EM | Expectation Maximization |
| GLMP | Global and Local Movement Pattern |
| RVO | Reciprocal Velocity Obstacle |
| BRVO | Bayesian Reciprocal Velocity Obstacle |
| LETKF | Local Ensemble Transform Kalman filter |
| DDA | Deep Data Assimilation |
| DNN | Deep Neural Network |
| LSTM | Long Short-term Memory |
| SSNN | State Space Neural Network |
| DEKF | Decoupled Extended Kalman Filter |
| FDA | Fast Data Assimilation |
| FCNN | Fully Connected Neural Network |
| RODDA | Reduced Order Deep Data Assimilation |
| PCA | Principal Component Analysis |
| NA | Neural Assimilation |
| PBNN | Patched-based Neural Network |
| E-NN | Elman Neural Network |
| CFD | Computational Fluid Dynamics |
| SVM | Support Vector Machine |
| RNN | Recurrent Neural Network |
| N.A | Not Applicable |
| EWA | Exponential Weight Algorithm |
References
- Ternes, P.; Ward, J.A.; Heppenstall, A.; Kumar, V.; Kieu, L.m.; Malleson, N. Data assimilation and agent-based modelling: Towards the incorporation of categorical agent parameters. Open. Res. Eur. 2021, 1, 131. [Google Scholar] [CrossRef]
- Clay, R.; Ward, J.A.; Ternes, P.; Kieu, L.M.; Malleson, N. Real-time agent-based crowd simulation with the Reversible Jump Unscented Kalman Filter. Simul. Model. Pract. Theory 2021, 113, 102386. [Google Scholar] [CrossRef]
- Malleson, N.; Tapper, A.; Ward, J.; Evans, A. Forecasting Short-Term Urban Dynamics: Data Assimilation for Agent-Based Modelling. In Proceedings of the Annual Conference of the European Social Simulation Association (ESSA), Dublin, Ireland, 29 March 2017; pp. 1–11. [Google Scholar]
- Wang, M.; Hu, X. Data assimilation in agent based simulation of smart environments using particle filters. Simul. Model. Pract. Theory 2015, 56, 36–54. [Google Scholar] [CrossRef]
- Swarup, S.; Mortveit, H.S. Live Simulations. In Proceedings of the 19th International Conference on Autonomous Agents and MultiAgent Systems, Auckland, New Zealand, 9–13 May 2020; pp. 1721–1725. [Google Scholar]
- Yang, S.; Li, T.; Gong, X.; Peng, B.; Hu, J. A review on crowd simulation and modeling. Graph. Model. 2020, 111, 101081. [Google Scholar] [CrossRef]
- van Toll, W.; Pettré, J. Algorithms for Microscopic Crowd Simulation: Advancements in the 2010s. Comput. Graph. Forum 2021, 40, 731–754. [Google Scholar] [CrossRef]
- Camara, F.; Bellotto, N.; Cosar, S.; Weber, F.; Nathanael, D.; Althoff, M.; Wu, J.; Ruenz, J.; Dietrich, A.; Markkula, G.; et al. Pedestrian Models for Autonomous Driving Part II: High-Level Models of Human Behavior. IEEE Trans. Intell. Transp. Syst. 2021, 22, 5453–5472. [Google Scholar] [CrossRef]
- Duives, D.C.; Daamen, W.; Hoogendoorn, S.P. State-of-the-art crowd motion simulation models. Transp. Res. Part C Emerg. Technol. 2013, 37, 193–209. [Google Scholar] [CrossRef]
- Siyam, N.; Alqaryouti, O.; Abdallah, S. Research Issues in Agent-Based Simulation for Pedestrians Evacuation. IEEE Access 2020, 8, 134435–134455. [Google Scholar] [CrossRef]
- Bonabeau, E. Agent-based modeling: Methods and techniques for simulating human systems. Proc. Natl. Acad. Sci. USA 2002, 99, 7280–7287. [Google Scholar] [CrossRef]
- Abar, S.; Theodoropoulos, G.K.; Lemarinier, P.; O’Hare, G.M. Agent Based Modelling and Simulation tools: A review of the state-of-art software. Comput. Sci. Rev. 2017, 24, 13–33. [Google Scholar] [CrossRef]
- Talagrand, O. The use of adjoint equations in numerical modelling of the atmospheric circulation. Autom. Differ. Algorit. Theory Implemen. Appl. 1991, 169, 180. [Google Scholar]
- Yilmaz, L. Concepts and Methodologies for Modeling and Simulation; Springer: Berlin/Heidelberg, Germany, 2015; p. 352. [Google Scholar] [CrossRef]
- Long, Y.; Hu, X. Dynamic data driven simulation with soft data. Simul. Ser. 2014, 46, 109–116. [Google Scholar]
- Shigenaka, S.; Takami, S.; Onishi, M. Estimating Pedestrian Flow in Crowded Situations with Data Assimilation. In Proceedings of the 10th International Workshop on Optimization in Multiagent Systems (OptMAS); 2019; pp. 1–16. Available online: https://www2.isye.gatech.edu/~fferdinando3/cfp/OPTMAS19/papers/paper_4.pdf (accessed on 11 October 2023).
- Suchak, K.; Malleson, N.; Ward, J.; Kieu, L.M. Towards Real-time Agent-Based Pedestrian Simulation using the Ensemble Kalman Filter. In Proceedings of the Geographical Information Science Research UK Conference (GISRUK), London, UK, 21 April–24 February 2020. [Google Scholar]
- Nakamura, T.; Shao, X.S.R. A Study on Data Assimilation of People Flow. Geospat. Data Geovis. Environ. Secur. Soc. 2010, 38, 1–6. [Google Scholar]
- Xu, Y.; Shibasaki, R.; Shao, X. Using data assimilation method to predict people flow in areas of incomplete data availability. In Proceedings of the 2016 IEEE Global Humanitarian Technology Conference (GHTC), Seattle, WA, USA, 15–17 October 2016; pp. 845–846. [Google Scholar] [CrossRef]
- Togashi, F.; Misaka, T.; Löhner, R.; Obayashi, S. Application of Ensemble Kalman Filter to Pedestrian Flow. Collect. Dyn. 2020, 5, A101. [Google Scholar] [CrossRef]
- Duives, D.C.; van Oijen, T.; Hoogendoorn, S.P. Enhancing Crowd Monitoring System Functionality through Data Fusion: Estimating Flow Rate from Wi-Fi Traces and Automated Counting System Data. Sensors 2020, 20, 6032. [Google Scholar] [CrossRef]
- Liu, M.; Li, L.; Li, Q.; Bai, Y.; Hu, C. Pedestrian flow prediction in open public places using graph convolutional network. ISPRS Int. J. Geo-Inf. 2021, 10, 455. [Google Scholar] [CrossRef]
- Singh, U.; Determe, J.F.; Horlin, F.; De Doncker, P. Crowd Monitoring: State-of-the-Art and Future Directions. IETE Tech. Rev. 2020, 38, 578–594. [Google Scholar] [CrossRef]
- Khan, K.; Albattah, W.; Khan, R.U.; Qamar, A.M.; Nayab, D. Advances and Trends in Real Time Visual Crowd Analysis. Sensors 2020, 20, 5073. [Google Scholar] [CrossRef]
- Miyaki, T.; Yamasaki, T.; Aizawa, K. Multi-sensor fusion tracking using visual information and Wi-Fi location estimation. In Proceedings of the 1st ACM/IEEE International Conference on Distributed Smart Cameras, ICDSC, Vienna, Austria, 25–28 September 2007; pp. 275–282. [Google Scholar] [CrossRef]
- Davies, A.C. Crowd monitoring using image processing. Electron. Commun. Eng. J. 1995, 7, 37–47. [Google Scholar] [CrossRef]
- Barandiaran, J.; Murguia, B.; Boto, F. Real-time people counting using multiple lines. In Proceedings of the WIAMIS 2008 Proceedings of the 9th International Workshop on Image Analysis for Multimedia Interactive Services, Klagenfurt, Austria, 7–9 May 2008; pp. 159–162. [Google Scholar] [CrossRef]
- Bera, A.; Manocha, D. Realtime Multilevel Crowd Tracking Using Reciprocal Velocity Obstacles. In Proceedings of the 22nd International Conference on Pattern Recognition, Stockholm, Sweden, 24–28 August 2014; pp. 4164–4169. [Google Scholar] [CrossRef]
- Chen, Y.c.; Chiang, J.r.; Chu, H.h.; Huang, P.; Wen, A. Sensor-assisted wi-fi indoor location system for adapting to environmental dynamics. In Proceedings of the 8th International Symposium on Modeling, Analysis and Simulation of Wireless and Mobile Systems, Montréal, QC, Canada, 10–13 October 2005; pp. 118–125. [Google Scholar]
- Danalet, A.; Farooq, B.; Bierlaire, M. A Bayesian approach to detect pedestrian destination-sequences from WiFi signatures. Transp. Res. Part C Emerg. Technol. 2014, 44, 146–170. [Google Scholar] [CrossRef]
- Xu, Z.; Sandrasegaran, K.; Kong, X.; Zhu, X.; Zhao, J.; Hu, B.; Chung Lin, C. Pedestrain Monitoring System using Wi-Fi Technology And RSSI Based Localization. Int. J. Wirel. Mob. Netw. 2013, 5, 17–34. [Google Scholar] [CrossRef]
- Hoogendoorn, S.P.; Daamen, W.; Duives, D.C.; Yuan, Y. Estimating travel times using Wi-Fi sensor data. In Proceedings of the TRISTAN 2016: The Triennial Symposium on Transportation Analysis, Oranjestad, Aruba, 13–17 June 2016; pp. 1–4. [Google Scholar]
- Bellini, P.; Cenni, D.; Nesi, P.; Paoli, I. Wi-Fi based city users’ behaviour analysis for smart city. J. Vis. Lang. Comput. 2017, 42, 31–45. [Google Scholar] [CrossRef]
- Alessandrini, A.; Gioia, C.; Sermi, F.; Sofos, I.; Tarchi, D.; Vespe, M. WiFi positioning and Big Data to monitor flows of people on a wide scale. In Proceedings of the 2017 European Navigation Conference, ENC 2017, Lausanne, Switzerland, 9–12 May 2017; pp. 322–328. [Google Scholar] [CrossRef]
- Fukuzaki, Y.; Murao, K.; Mochizuki, M.; Nishio, N. Statistical analysis of actual number of pedestrians for Wi-Fi packet-based pedestrian flow sensing. In Proceedings of the UbiComp and ISWC 2015—Proceedings of the 2015 ACM International Joint Conference on Pervasive and Ubiquitous Computing and the Proceedings of the 2015 ACM International Symposium on Wearable Computers; Osaka, Japan, 7–11 September 2015, pp. 1519–1526. [CrossRef]
- Yuan, Y.; Daamen, W.; Duives, D.; Hoogendoorn, S. Comparison of three algorithms for real-time pedestrian state estimation—Supporting a monitoring dashboard for large-scale events. In Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016; pp. 2601–2606. [Google Scholar] [CrossRef]
- Duives, D.C.; Wang, G.; Kim, J. Forecasting pedestrian movements using recurrent neural networks: An application of crowd monitoring data. Sensors 2019, 19, 382. [Google Scholar] [CrossRef] [PubMed]
- Botta, F.; Moat, H.S.; Preis, T. Quantifying crowd size with mobile phone and Twitter data. R. Soc. Open Sci. 2015, 2, 150162. [Google Scholar] [CrossRef]
- Gong, Y.; Liu, W.; Li, Z.; Zheng, Y.; Zhang, J.; Kirsch, C. Network-wide crowd flow prediction of Sydney trains via customized online non-negative matrix factorization. In Proceedings of the International Conference on Information and Knowledge Management, Torino, Italy, 22–26 October 2018; pp. 1243–1252. [Google Scholar] [CrossRef]
- Nassir, N.; Khani, A.; Lee, S.G.; Noh, H.; Hickman, M. Transit Stop-Level Origin–Destination Estimation through Use of Transit Schedule and Automated Data Collection System. Transp. Res. Rec. 2011, 2263, 140–150. [Google Scholar] [CrossRef]
- Nassir, N.; Hickman, M.; Ma, Z.L. Activity detection and transfer identification for public transit fare card data. Transportation 2015, 42, 683–705. [Google Scholar] [CrossRef]
- Nassir, N.; Hickman, M.; Ma, Z.L. A strategy-based recursive path choice model for public transit smart card data. Transp. Res. Part B Methodol. 2019, 126, 528–548. [Google Scholar] [CrossRef]
- Zhang, J.; Zheng, Y.; Qi, D.; Li, R.; Yi, X.; Li, T. Predicting citywide crowd flows using deep spatio-temporal residual networks. Artif. Intell. 2018, 259, 147–166. [Google Scholar] [CrossRef]
- Jiang, R.; Song, X.; Wang, Z.; Huang, D.; Song, X.; Kim, K.S.; Xia, T.; Cai, Z.; Shibasaki, R. Deepurbanevent: A system for predicting citywide crowd dynamics at big events. In Proceedings of the ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, Anchorage, AK, USA, 4–8 August 2019; pp. 2114–2122. [Google Scholar] [CrossRef]
- Gong, Y.; Li, Z.; Zhang, J.; Liu, W.; Zheng, Y. Online Spatio-temporal Crowd Flow Distribution Prediction for Complex Metro System. IEEE Trans. Knowl. Data Eng. 2020, 34, 865–880. [Google Scholar] [CrossRef]
- Xie, P.; Li, T.; Liu, J.; Du, S.; Yang, X.; Zhang, J. Urban flow prediction from spatiotemporal data using machine learning: A survey. Inf. Fusion 2020, 59, 1–12. [Google Scholar] [CrossRef]
- Sohn, S.S.; Zhou, H.; Moon, S.; Yoon, S.; Pavlovic, V.; Kapadia, M. Laying the Foundations of Deep Long-Term Crowd Flow Prediction. In Proceedings of the Computer Vision—ECCV 2020, Glasgow, UK, 23–28 August 2020; Springer: Berlin/Heidelberg, Germany, 2020; pp. 711–728. [Google Scholar] [CrossRef]
- Pan, Z.; Wang, Z.; Wang, W.; Yu, Y.; Zhang, J.; Zheng, Y. Matrix Factorization for Spatio-Temporal Neural Networks with Applications to Urban Flow Prediction. In Proceedings of the 28th ACM International Conference on Information and Knowledge Management, Beijing, China, 3–7 November 2019; pp. 2683–2691. [Google Scholar] [CrossRef]
- Bain, D. Pedestrian monitoring techniques for crowd-flow prediction. In Proceedings of the Institution of Civil Engineers-Smart Infrastructure and Construction; Thomas Telford Ltd: London, UK, 2017; Volume 170, pp. 17–27. [Google Scholar]
- Bera, A.; Kim, S.; Randhavane, T.; Pratapa, S.; Manocha, D. GLMP- realtime pedestrian path prediction using global and local movement patterns. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 5528–5535. [Google Scholar] [CrossRef]
- Bera, A.; Galoppo, N.; Sharlet, D.; Lake, A.; Manocha, D. AdaPT: Real-time adaptive pedestrian tracking for crowded scenes. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 1801–1808. [Google Scholar] [CrossRef]
- Darema, F. Dynamic data driven applications systems: A new paradigm for application simulations and measurements. Lect. Notes Comput. Sci. 2004, 3038, 662–669. [Google Scholar] [CrossRef]
- Wang, M. ScholarWorks @ Georgia State University Data Assimilation for Agent-Based Simulation of Smart Environment. Ph.D. Dissertation, Georgia State University, Atlanta, GA, USA, 2014. [Google Scholar]
- Carrassi, A.; Bocquet, M.; Bertino, L.; Evensen, G. Data assimilation in the geosciences: An overview of methods, issues, and perspectives. Wiley Interdiscip. Rev. Clim. Chang. 2018, 9, 1–50. [Google Scholar] [CrossRef]
- Fujimoto, R.; Blasch, E.; Jin, D.; Barjis, J.; Cai, W.; Lee, S.; Son, Y.J. Dynamic data driven application systems: Research challenges and opportunities. Proc. Winter Simul. Conf. 2019, 2018, 664–678. [Google Scholar] [CrossRef]
- Ward, J.A.; Evans, A.J.; Malleson, N.S. Dynamic calibration of agent-based models using data assimilation. R. Soc. Open Sci. 2016, 3, 150703. [Google Scholar] [CrossRef]
- Malleson, N.; Minors, K.; Kieu, L.M.; Ward, J.A.; West, A.A.; Heppenstall, A. Simulating crowds in real time with agent-based modelling and a particle filter. J. Artif. Soc. Soc. Simul. 2019, 23, 3. [Google Scholar] [CrossRef]
- Tang, D. Data Assimilation in Agent-Based Models using Creation and Annihilation Operators; University of Leeds: Leeds, UK, 2019. [Google Scholar] [CrossRef]
- Yazdani, M.; Sarvi, M.; Asadi Bagloee, S.; Nassir, N.; Price, J.; Parineh, H. Intelligent vehicle pedestrian light (IVPL): A deep reinforcement learning approach for traffic signal control. Transp. Res. Part C Emerg. Technol. 2023, 149, 103991. [Google Scholar] [CrossRef]
- Kang, D.O.; Bae, J.W.; Lee, C.; Jung, J.Y.; Paik, E. Data Assimilation Technique for Social Agent-Based Simulation by Using Reinforcement Learning. In Proceedings of the 2018 IEEE/ACM 22nd International Symposium on Distributed Simulation and Real Time Applications, DS-RT 2018, Madrid, Spain, 15–17 October 2018; pp. 220–221. [Google Scholar] [CrossRef]
- Van Leeuwen, P.J. Particle filtering in geophysical systems. Mon. Weather. Rev. 2009, 137, 4089–4114. [Google Scholar] [CrossRef]
- Lueck, J.; Rife, J.H.; Swarup, S.; Uddin, N. Who goes there? Using an agent-based simulation for tracking population movement. In Proceedings of the 2019 Winter Simulation Conference (WSC), National Harbor, MD, USA, 8–11 December 2019; pp. 227–238. [Google Scholar] [CrossRef]
- Flury, T.; Shephard, N. Learning and Filtering via Simulation: Smoothly Jittered Particle Filters; University of Oxford: Oxford, UK, 2009; pp. 1–27. [Google Scholar]
- Rai, S.; Hu, X. Behavior pattern detection for data assimilation in agent-based simulation of smart environments. In Proceedings of the 2013 IEEE/WIC/ACM International Conference on Intelligent Agent Technology, IAT 2013, Atlanta, GA, USA, 17–20 November 2013; Volume 2, pp. 171–178. [Google Scholar] [CrossRef]
- Snyder, C.; Bengtsson, T.; Bickel, P.; Anderson, J. Obstacles to high-dimensional particle filtering. Mon. Weather. Rev. 2008, 136, 4629–4640. [Google Scholar] [CrossRef]
- Feng, X.; Yan, X.; Hu, X. Dynamic data driven particle filter for agent-based traffic state estimation. Lect. Notes Comput. Sci. 2015, 9483, 321–331. [Google Scholar] [CrossRef]
- Sun, C.; Richard, S.; Miyoshi, T.; Tsuzu, N. Analysis of COVID-19 Spread in Tokyo through an Agent-Based Model with Data Assimilation. J. Clin. Med. 2022, 11, 2401. [Google Scholar] [CrossRef]
- Cocucci, T.; Pulido, M.; Aparicio, J.; Ruíz, J.; Simoy, M.; Rosa, S. Inference in epidemiological agent-based models using ensemble-based data assimilation. PLoS ONE 2022, 17, e026489. [Google Scholar] [CrossRef] [PubMed]
- Kreuger, K.; Osgood, N. Particle filtering using agent-based transmission models. In Proceedings of the Winter Simulation Conference, Huntington Beach, CA, USA, 6–9 December 2016; Volume 2016, pp. 737–747. [Google Scholar] [CrossRef]
- Tabataba, F.S.; Lewis, B.; Hosseinipour, M.; Tabataba, F.S.; Venkatramanan, S.; Chen, J.; Higdon, D.; Marathe, M. Epidemic forecasting framework combining agent-based models and smart beam particle filtering. In Proceedings of the IEEE International Conference on Data Mining, ICDM, New Orleans, LA, USA, 18–21 November 2017; Volume 20, pp. 1099–1104. [Google Scholar] [CrossRef]
- Kalman, R.E. A New Approach to Linear Filtering and Prediction Problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef]
- Humpherys, J.; Redd, P.; West, J. A fresh look at the kalman filter. SIAM Rev. 2012, 54, 801–823. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K. New extension of the Kalman filter to nonlinear systems. Signal Process. Sens. Fusion Target Recognit. 1997, 3068, 182. [Google Scholar] [CrossRef]
- Cai, Z.; Zhao, D. Unscented Kalman Filter for Non-Linear Estimation; Geomatics and Information Science of Wuhan University: Wuhan, China, 2006; Volume 31, pp. 180–183. [Google Scholar]
- Clay, R.; Kieu, L.M.; Ward, J.A.; Heppenstall, A.; Malleson, N. Towards Real-Time Crowd Simulation Under Uncertainty Using an Agent-Based Model and an Unscented Kalman Filter. In Advances in Practical Applications of Agents, Multi-Agent Systems, and Trustworthiness; Springer: Berlin/Heidelberg, Germany, 2020; pp. 68–79. [Google Scholar] [CrossRef]
- Evensen, G. Sequential data assimilation with a nonlinear quasi-geostrophic model using Monte Carlo methods to forecast error statistics. J. Geophys. Res. 1994, 99, 10143–10162. [Google Scholar] [CrossRef]
- Mandel, J. A Brief Tutorial on the Ensemble Kalman Filter. arXiv 2009, arXiv:0901.3725. [Google Scholar]
- Hager, W.W. Updating the Inverse of a Matrix. SIAM Rev. 1989, 31, 221–239. [Google Scholar] [CrossRef]
- Pasetto, D.; Camporese, M.; Putti, M. Ensemble Kalman filter versus particle filter for a physically-based coupled surface-subsurface model. Adv. Water Resour. 2012, 47, 1–13. [Google Scholar] [CrossRef]
- Togashi, F.; Misaka, T.; Löhner, R.; Obayashi, S. Using ensemble Kalman filter to determine parameters for computational crowd dynamics simulations. Eng. Comput. 2018, 35, 2612–2628. [Google Scholar] [CrossRef]
- Lohner, R.; Baqui, M.; Haug, E.; Muhamad, B. Real-time micro-modelling of a million pedestrians. Eng. Comput. 2016, 33, 217–237. [Google Scholar] [CrossRef]
- Buizza, C.; Casas, C.Q.; Nadler, P.; Mack, J.; Marrone, S.; Titus, Z.; Cornec, C.L.; Heylen, E.; Dur, T.; Ruiz, L.B.; et al. Data Learning: Integrating Data Assimilation and Machine Learning. J. Comput. Sci. 2022, 2022, 101525. [Google Scholar] [CrossRef]
- Camara, F.; Bellotto, N.; Cosar, S.; Nathanael, D.; Althoff, M.; Wu, J.; Ruenz, J.; Dietrich, A.; Fox, C. Pedestrian Models for Autonomous Driving Part I: Low-Level Models, from Sensing to Tracking. IEEE Trans. Intell. Transp. Syst. 2021, 22, 6131–6151. [Google Scholar] [CrossRef]
- Liao, L.; Fox, D.; Hightower, J.; Kautz, H.; Schulz, D. Voronoi Tracking: Location Estimation Using Sparse and Noisy Sensor Data. IEEE Int. Conf. Intell. Robot. Syst. 2003, 1, 723–728. [Google Scholar] [CrossRef]
- Luber, M.; Stork, J.A.; Tipaldi, G.D.; Arras, K.O. People tracking with human motion predictions from social forces. In Proceedings of the IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 464–469. [Google Scholar] [CrossRef]
- Bera, A.; Manocha, D. REACH—Realtime crowd tracking using a hybrid motion model. In Proceedings of the IEEE International Conference on Robotics and Automation, Seattle, WA, USA, 26–30 May 2015; Volume 2015, pp. 740–747. [Google Scholar] [CrossRef]
- Bera, A.; Wolinski, D.; Pettré, J.; Manocha, D. Realtime Pedestrian Tracking and Prediction in Dense Crowds. In Group and Crowd Behavior for Computer Vision; Academic Press: Cambridge, MA, USA, 2017; pp. 391–415. [Google Scholar] [CrossRef]
- Hoes, P.; Hensen, J.L.; Loomans, M.G.; de Vries, B.; Bourgeois, D. User behavior in whole building simulation. Energy Build. 2009, 41, 295–302. [Google Scholar] [CrossRef]
- Tomastik, R.; Lin, Y.; Banaszuk, A. Video-based estimation of building occupancy during emergency egress. In Proceedings of the American Control Conference, Seattle, WA, USA, 11–13 June 2008; pp. 894–901. [Google Scholar] [CrossRef]
- Masood, M.K.; Yeng, C.S.; Chang, V.W.C. Real-time occupancy estimation using environmental parameters. In Proceedings of the 2015 International Joint Conference on Neural Networks (IJCNN), Killarney, Ireland, 12–17 July 2015; Volume 2015, pp. 1–8. [Google Scholar] [CrossRef]
- Rai, S. ScholarWorks @ Georgia State University Building Occupancy Simulation and Data Assimilation. Ph.D. Thesis, Georgia State University, Atlanta, GA, USA, 2016. [Google Scholar]
- Rai, S.; Hu, X. Data assimilation with sensor-informed resampling for building occupancy simulation. In Proceedings of the 2017 Winter Simulation Conference (WSC), Las Vegas, NV, USA, 3–6 December 2017; pp. 1145–1156. [Google Scholar] [CrossRef]
- Brunton, S.L.; Proctor, J.L.; Kutz, J.N.; Bialek, W. Discovering governing equations from data by sparse identification of nonlinear dynamical systems. Proc. Natl. Acad. Sci. USA 2016, 113, 3932–3937. [Google Scholar] [CrossRef]
- Rani, M.; Dhok, S.B.; Deshmukh, R.B. A Systematic Review of Compressive Sensing: Concepts, Implementations and Applications. IEEE Access 2018, 6, 4875–4894. [Google Scholar] [CrossRef]
- Foucart, S.; Rauhut, H. A Mathematical Introduction to Compressive Sensing; Number 9780817649470; Birkhauser: Basel, Switzerland, 2013; pp. 1–615. [Google Scholar]
- Rudy, S.H.; Brunton, S.L.; Proctor, J.L.; Kutz, J.N. Data-driven discovery of partial differential equations. Sci. Adv. 2017, 3, e1602614. [Google Scholar] [CrossRef]
- Baddoo, P.J.; Herrmann, B.; McKeon, B.J.; Brunton, S.L. Kernel Learning for Robust Dynamic Mode Decomposition: Linear and Nonlinear Disambiguation Optimization (LANDO). Proc. R. Soc. A 2021, 478, 20210830. [Google Scholar] [CrossRef]
- Cranmer, M.; Sanchez-Gonzalez, A.; Battaglia, P.; Xu, R.; Cranmer, K.; Spergel, D.; Ho, S. Discovering symbolic models from deep learning with inductive biases. arXiv 2020, arXiv:2006.11287. [Google Scholar]
- Ghorbani, A.; Nassir, N.; Lavieri, P.S.; Beeramoole, P.B. A sparse identification approach for automating choice models’ specification. arXiv 2023, arXiv:2305.00912. [Google Scholar]
- Misaka, T. Image-based fluid data assimilation with deep neural network. Struct. Multidiscip. Optim. 2020, 62, 805–814. [Google Scholar] [CrossRef]
- Wu, P.; Chang, X.; Yuan, W.; Sun, J.; Zhang, W.; Arcucci, R.; Guo, Y. Fast data assimilation (FDA): Data assimilation by machine learning for faster optimize model state. J. Comput. Sci. 2021, 51, 101323. [Google Scholar] [CrossRef]
- Amendola, M.; Arcucci, R.; Mottet, L.; Casas, C.Q.; Fan, S.; Pain, C.; Linden, P.; Guo, Y.K. Data Assimilation in the Latent Space of a Convolutional Autoencoder. In Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2021; Volume 12746 LNCS, pp. 373–386. [Google Scholar] [CrossRef]
- Elman, J.L. Finding structure in time. Cogn. Sci. 1990, 14, 179–211. [Google Scholar] [CrossRef]
- Härter, F.P.; de Campos Velho, H.F. New approach to applying neural network in nonlinear dynamic model. Appl. Math. Model. 2008, 32, 2621–2633. [Google Scholar] [CrossRef]
- ichi Funahashi, K.; Nakamura, Y. Approximation of dynamical systems by continuous time recurrent neural networks. Neural Netw. 1993, 6, 801–806. [Google Scholar] [CrossRef]
- Schäfer, A.M.; Zimmermann, H.G. Recurrent Neural Networks Are Universal Approximators. In Proceedings of the Artificial Neural Networks—ICANN 2006, Athens, Greece, 10–14 September 2006; Kollias, S.D., Stafylopatis, A., Duch, W., Oja, E., Eds.; Springer: Berlin/Heidelberg, Germany, 2006; pp. 632–640. [Google Scholar]
- Härter, F.; De Campos Velho, H. Data assimilation procedure by recurrent neural network. Eng. Appl. Comput. Fluid Mech. 2012, 6, 224–233. [Google Scholar] [CrossRef]
- De Campos Velho, H.F.; Stephany, S.; Preto, A.J.; Vijaykumar, N.L.; Nowosad, A.G. A neural network implementation for data assimilation using MPI. Adv. High Perform. Comput. 2002, 7, 211–220. [Google Scholar]
- Hsieh, W.W.; Tang, B. Applying Neural Network Models to Prediction and Data Analysis in Meteorology and Oceanography. Bull. Am. Meteorol. Soc. 1998, 79, 1855–1870. [Google Scholar] [CrossRef]
- Liaqat, A.; Fukuhara, M.; Takeda, T. Applying a neural network collocation method to an incompletely known dynamical system via weak constraint data assimilation. Mon. Weather. Rev. 2003, 131, 1696–1714. [Google Scholar] [CrossRef]
- Furtado, H.C.M.; Velho, H.F.D.C.; MacAu, E.E.N. Data assimilation: Particle filter and artificial neural networks. J. Phys. Conf. Ser. 2008, 135. [Google Scholar] [CrossRef]
- Cintra, R.; De Campos Velho, H.; Cocke, S. Tracking the model: Data assimilation by artificial neural network. In Proceedings of the International Joint Conference on Neural Networks, Vancouver, BC, Canada, 24–29 July 2016; pp. 403–410. [Google Scholar] [CrossRef]
- Duane, G. “fORCE” learning in recurrent neural networks as data assimilation. Chaos 2017, 27, 126804. [Google Scholar] [CrossRef] [PubMed]
- Arcucci, R.; Zhu, J.; Hu, S.; Guo, Y.K. Deep data assimilation: Integrating deep learning with data assimilation. Appl. Sci. 2021, 11, 1114. [Google Scholar] [CrossRef]
- Taguchi, S.; Yoshimura, T. Online Estimation and Prediction of Large-Scale Network Traffic From Sparse Probe Vehicle Data. IEEE Trans. Intell. Transp. Syst. 2021, 23, 7233–7243. [Google Scholar] [CrossRef]
- Fan, M.; Bai, Y.; Wang, L.; Ding, L. Combining a fully connected neural network with an ensemble Kalman filter to emulate a dynamic model in data assimilation. IEEE Access 2021, 9, 144952–144964. [Google Scholar] [CrossRef]
- Casas, C.Q.; Arcucci, R.; Wu, P.; Pain, C.; Guo, Y.K. A Reduced Order Deep Data Assimilation model. Phys. D Nonlin. Phenom. 2020, 412, 132615. [Google Scholar] [CrossRef]
- Arcucci, R.; Moutiq, L.; Guo, Y.K. Neural Assimilation. In Proceedings of the Computational Science—ICCS 2020, Amsterdam, The Netherlands, 3–5 June 2020; Krzhizhanovskaya, V.V., Závodszky, G., Lees, M.H., Dongarra, J.J., Sloot, P.M.A., Brissos, S., Teixeira, J., Eds.; Springer: Cham, Switzerland, 2020; pp. 155–168. [Google Scholar]
- Zhang, Z.; Li, C.W.; Qi, Y.; Li, Y.S. Incorporation of artificial neural networks and data asssimilation techniques into a third-generation wind-wave model for wave forecasting. J. Hydroinform. 2006, 8, 65–76. [Google Scholar] [CrossRef]
- Härter, F.P.; de Campos Velho, H.F.; Rempel, E.L.; Chian, A.C. Neural networks in auroral data assimilation. J. Atmos. Sol.-Terr. Phys. 2008, 70, 1243–1250. [Google Scholar] [CrossRef]
- Furtado, H.; De Campos Velho, H.; Macau, E. Neural networks for emulation variational method for data assimilation in nonlinear dynamics. Proc. J. Phys. Conf. Ser. 2011, 285, 012036. [Google Scholar] [CrossRef]
- Furtado, H.C.M.; Velho, H.F.D.C. Data assimilation by neural network emulating representer method applied to the wave equation. Chin. J. Theoret. Appl. Mech. 2012, 42, 476–484. [Google Scholar]
- Cintra, R.S.; Velho, H.F.d.C. Data Assimilation by Artificial Neural Networks for an Atmospheric General Circulation Model. In Advanced Applications for Artificial Neural Networks; InTech: London, UK, 2018; Volume 32, pp. 137–144. [Google Scholar] [CrossRef]
- Ouala, S.; Fablet, R.; Herzet, C.; Chapron, B.; Pascual, A.; Collard, F.; Gaultier, L. Neural network based Kalman filters for the spatio-temporal interpolation of satellite-derived sea surface temperature. Remote Sens. 2018, 10, 1864. [Google Scholar] [CrossRef]
- Zhu, J.; Hu, S.; Arcucci, R.; Xu, C.; Zhu, J.; Guo, Y.K. Model error correction in data assimilation by integrating neural networks. Big Data Min. Anal. 2019, 2, 83–91. [Google Scholar] [CrossRef]
- Lang, J.; Qiu, F.; Wu, P. Data assimilation model based on machine learning. J. Phys. Conf. Ser. 2021, 1883, 012035. [Google Scholar] [CrossRef]
- Huang, L.; Leng, H.; Li, X.; Ren, K.; Song, J.; Wang, D. A Data-Driven Method for Hybrid Data Assimilation with Multilayer Perceptron. Big Data Res. 2021, 23, 100179. [Google Scholar] [CrossRef]
- Train, K.E. Discrete Choice Methods with Simulation; Cambridge University Press: Cambridge, UK, 2009. [Google Scholar]
- Sifringer, B.; Lurkin, V.; Alahi, A. Enhancing discrete choice models with representation learning. Transp. Res. Part B Methodol. 2020, 140, 236–261. [Google Scholar] [CrossRef]
- Rodrigues, F.; Ortelli, N.; Bierlaire, M.; Pereira, F. Bayesian Automatic Relevance Determination for Utility Function Specification in Discrete Choice Models. arXiv 2019, arXiv:1906.03855. [Google Scholar] [CrossRef]
- Mohri, M.; Rostamizadeh, A.; Talwalkar, A. Foundations of Machine Learning, 2nd ed.; Adaptive Computation and Machine Learning; MIT Press: Cambridge, MA, USA, 2018. [Google Scholar]
- Law, K.; Stuart, A.; Zygalakis, K. Data Assimilation; Springer: Cham, Switzerland, 2015; Volume 214. [Google Scholar]
- Hoeffding, W. Probability inequalities for sums of bounded random variables. In The Collected Works of Wassily Hoeffding; Springer: Berlin/Heidelberg, Germany, 1994; pp. 409–426. [Google Scholar]
- Paris, Q. Online Learning with Exponential Weights in Metric Spaces. arXiv 2021, arXiv:2103.14389. [Google Scholar]
- Ngom, B.; Diallo, M.; Seyc, M.; Drame, M.; Cambier, C.; Marilleau, N. PM10 Data Assimilation on Real-time Agent-based Simulation using Machine Learning Models: Case of Dakar Urban Air Pollution Study. In Proceedings of the 2021 IEEE/ACM 25th International Symposium on Distributed Simulation and Real Time Applications, DS-RT 2021, Valencia, Spain, 27–29 September 2021. [Google Scholar] [CrossRef]
- Ghorbani, A. Spacetime metric for pedestrian movement. arXiv 2022, arXiv:2211.10792. [Google Scholar]
- Ghorbani, A. A field approach for pedestrian movement modelling. arXiv 2022, arXiv:2211.06734. [Google Scholar]

{kind=link}
| Category | Keywords |
|---|---|
| Method | |
| reinforcement learning, Kalman filter, particle filter extended Kalman, game, neural network | |
| Technique | data assimilation, data association, modeling, agent-based, multi-agent |
| Concept | |
| data-driven dynamic, real-time pedestrian simulation dynamic data-driven | |
| Application | tracking pedestrian, route choice modeling, behavior prediction |
| DA | CMS | |
|---|---|---|
| Computaional cost | >CMS | DA> |
| Systemic data noise consideration | 🗸 | × |
| Detailed pedestrian dynamic | 🗸 | × |
| Handling spatiotemporal sparsity in data | 🗸 | × |
| Application in practice | Not Common | Common method |
| Paper | Method | Estimated Variables | Number of Agents | Number of Ensembles (Particles) | Sampling/Resampling Method | Efficacy Metric | Observation Source | Main Finding or Application |
|---|---|---|---|---|---|---|---|---|
| [2] | RJUKF | Agents’ location, Destination | 10, 20, 30 | — | N.A | Grand median L2 norm between estimated and true locations, Indicator function(for destination) | Synthetic data | Combining RJMCMC with UKF |
| [75] | UKF | Agents’ location | 10, 20, 30 | — | N.A | Grand median L2 norm between estimated and true locations | Synthetic data | Applying UKF for ABDA for the first time |
| [4] | PF | Agents’ location, Destination | 1–6 | 800–2000 | Standard +mixed component | Average of L2 norm | Synthetic data | New resampling method |
| [62] | PF | Agents’ location+behavior (both integer) | 100 | 50 | Metropolis-Hastings (M-H) | Absolute distance between normalized particle count and true count(summed over all nodes) | Synthetic data | PF for evacuation scenario + mapping method for efficient measurement update |
| [57] | PF | Agents’ location | 2–40 | 1–10,000 | SIR | Median of mean L2 norm between estimated and true Agnets’ locations | Synthetic data | Attempting to apply data assimilation to a system that exhibits emergence—Performing extensive experiments to assess PFs for DA |
| [57] | PF | Agents’ parameters, variables and global model parameter | 2–40 | 1–10,000 | SIR | Median of mean L2 norm between estimated and true Agents’ state | Synthetic data | Performing extensive experiments to assess PFs for DA |
| [1] | PF | Agents’ location+destination+desired speed | 274 | 5000 | SIR+ Adapted SIR | Mean distance | CCTV camera | Adapted resampling method + testing PF on real world scenario (proof of concept) |
| [18] | PF | Trajectory | 323–2299 | 108–640 | Custom | RMSE of destinations | Real world trajectory | Model based method for estimating people flow |
| [64] | PF | Agents’ location+destination+velocity | —- | — | — | — | — | Behavior pattern informed data assimilation |
| [17] | EnKF | Agents’ location | 20 | 10 | N.A | Distances | Synthetic Data | Applying EnKF to ABM |
| [3] | EnKF | Agents’ location +model parameters | 600 | 30 | N.A | RMSE | Synthetic data | AMB parameter optimization |
| [56] | EnKF | Num. of people +model parameters | (0, 19,820) | 1, 100, 1000 | N.A | RMSE | Synthetic data + camera counts | Applying EnKF to ABM |
| [80] | EnKF | Model parameters | middle to high (more than 1000) | 20,32 | N.A | costume cost function | Camera | Applying EnKF for ABM calibration |
| [16] | Genetic algorithm | parameter estimation | 10 k–100 k | N.A | N.A | Nash–Sutcliffe model efficiency coefficient (NSE) | Camera count + GPS | 78.1% accuracy for parameter space |
| Characteristic | PF | EnKF | RJUKF | UKF |
|---|---|---|---|---|
| Computational cost | High | Less than PF | Less than EnKF | Less than EnKF |
| Categorical variables | 🗸 | × | 🗸 | × |
| Non-linearity | 🗸 | 🗸 | 🗸 | 🗸 |
| Closed form formula | × | 🗸 | × | 🗸 |
| Assumption on pdf form | × | 🗸 | 🗸 | 🗸 |
| Paper | NN Type | Integrated DA Method | Dynamical Model |
|---|---|---|---|
| [108] | MLP | KF | Lorenz model |
| [119] | - | Statistical Interpolation(SI) | Wave model |
| [111] | MLP | PF | Lorenz model |
| [120] | MLP | KF | Three-wave model |
| [121] | MLP | Variational | Lorenz model |
| [122] | MLP | Variational | Wave model |
| [107] | Elman | KF | Shallow water 1D model (DYNAMO-1D) |
| [104] | RBF | KF | Shallow water 1D model (DYNAMO-1D) |
| [112] | MLP | LETKF | Atmospheric general circulation model (FSUGSM) |
| [123] | MLP | LETKF | Atmospheric general circulation model (SPEEDY) |
| [124] | Mixed Type | KF | Satellite-Derived Sea Surface Temperature data |
| [125] | Fully Connected | Variational, KF | Dot system and Lorenz models |
| [117] | LSTM | Variational (3DVAR) | CFD model (Fluidity) |
| [114] | Elman | Variational | Dot system and Lorenz models |
| [102] | LSTM | KF | CFD model (Fluidity) |
| [101] | MLP | Variational | Lorenz model |
| [126] | LSTM | Variational | Lorenz model |
| [127] | MLP | Variational and EnKF | Lorenz model |
| [118] | LSTM | KF | Oxygen diffusion across the Blood–Brain Barrier model |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ghorbani, A.; Ghorbani, V.; Nazari-Heris, M.; Asadi, S. Data Assimilation for Agent-Based Models. Mathematics 2023, 11, 4296. https://doi.org/10.3390/math11204296
Ghorbani A, Ghorbani V, Nazari-Heris M, Asadi S. Data Assimilation for Agent-Based Models. Mathematics. 2023; 11(20):4296. https://doi.org/10.3390/math11204296
Chicago/Turabian StyleGhorbani, Amir, Vahid Ghorbani, Morteza Nazari-Heris, and Somayeh Asadi. 2023. "Data Assimilation for Agent-Based Models" Mathematics 11, no. 20: 4296. https://doi.org/10.3390/math11204296
APA StyleGhorbani, A., Ghorbani, V., Nazari-Heris, M., & Asadi, S. (2023). Data Assimilation for Agent-Based Models. Mathematics, 11(20), 4296. https://doi.org/10.3390/math11204296