Abstract
Traffic patterns in urban areas present a complex and dynamic system that is characterized by inherent uncertainties. The presented study is a traffic light control system with feedback. The controller of the system is designed in a fuzzy and conventional way and is applied to a network of two junctions. The verification is performed using the MATLAB fuzzy toolbox platform (for designing the fuzzy controller) and Aimsun platform for microsimulation of the two junctions using the two types of controllers. To accomplish the control of the system a fuzzy controller on heuristic rules proposed to allow adaptive traffic control on signalized junctions in urban environments. The Fuzzy Toolbox in MATLAB is used to simulate the fuzzy controller. The Aimsun traffic simulator is used to model and simulate a traffic network of two intersections. The green light duration in the Aimsun model is based on the results for the two controllers from two separated experiments. Simulations of Aimsun models with the two types of controllers, the fuzzy and the conventional one, are compared. The experiment is performed under the premise that the traffic flow is oversaturated. Findings show that in a network of two junctions both controllers perform in a similar manner for the first junction. However, for the second junction, the fuzzy controller tends to have some advantages over the conventional controller with regard to higher traffic flow. In conclusion, the overall performance of the fuzzy controller is better than the one of the conventional controller, but further research is needed for more complex traffic networks.
MSC:
03E72; 93C95; 93C42; 90C70; 90B20
1. Introduction
Traffic signal control is essential in urban areas where vehicles meet at junctions and pedestrians need to cross junctions as well. Traffic signal control allocates time for each stream of vehicles and pedestrians. Finding traffic control settings that correspond to traffic conditions in the most appropriate manner is a task pursued by many scientists and traffic experts worldwide [1,2,3,4,5,6,7] and locally [8,9,10].
Traffic features and traffic control are subject of many studies with different methods. Other researchers worked with the same method but in different context, e.g., under mixed traffic conditions typical for the developing countries in Asia [11,12]. Other strategies for traffic optimization are presented in [13,14] related to road traffic control using iterations for each cycle of traffic optimization. This study presents design of fuzzy and conventional controllers for the modeling and simulation of an urban traffic light control system with feedback.
There are different applications of fuzzy logic especially for complex systems operating under uncertainty such as ill- defined environment, noisy data, insufficient information about input and output parameters. One of these applications is related to expert decision-making system for rock slope block-toppling modeling and assessment [15,16]. Another application of fuzzy logic is related to transportation problems, where system inputs, such as the number of cars or traffic conditions, are not well defined.
Unlike the classical optimization methods that rely on iterations for each cycle length of the green light, the proposed approach in this paper focuses on the feedback control of green light and number of cars. The novelty of the study is in the design of a fuzzy controller with heuristic fuzzy rules using expert knowledge and feedback control. The paper presents an experiment with the use of fuzzy logic for traffic signal control modeled via the Fuzzy Toolbox in MATLAB [17]. Additionally, the traffic simulation software Aimsun is used to simulate a single junction and a network of two junctions in urban environment. The fuzzy controller is compared to a conventional controller and conclusions are drawn. From the number of iterations needed, it becomes obvious that the fuzzy controller has advantages over the conventional controller when a network of junctions is considered. In contrast, when only one junction was considered, both controllers performed in a similar manner.
The control parameter is the duration of the green light within the cycle length of the traffic light. The duration of the green light is in relationship to the traffic flow. The duration of the green light is the output of the traffic light control system with feedback.
The aim of this research is to present how the fuzzy and conventional controllers behave in the case of traffic flow on an oversaturated network.
2. Design of Fuzzy Controller
The fuzzy controller is designed as a Mamdani fuzzy system with two inputs, i.e., e1 and e2, and the output u1 [18,19,20,21]. Once output u1 for Section 1 has been derived from the simulation of the fuzzy system, output u2 for Section 2 is calculated as the difference between the fixed duration of the full cycle of the green light and the duration of u1. In this case, the fixed duration of the full cycle of the green light is 100 s and the following equation holds:
u1 + u2 = 100
Figure 1 depicts the fuzzy system with two inputs and one output as well as the nine rules.
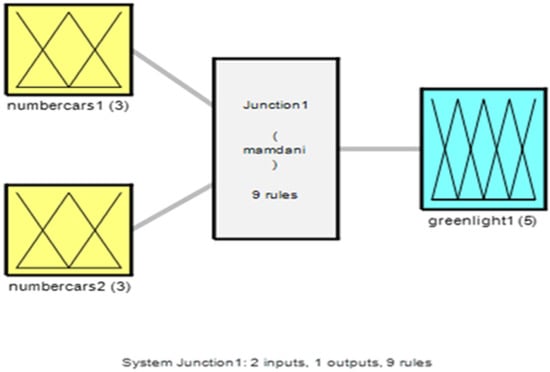
Figure 1.
Fuzzy controller for junction 1 with two inputs, one output and nine rules.
A triangular membership functions are presented for modeling of the fuzzy system with two inputs and the output. This is the simplest and most commonly used membership function. It depicts the first input for junction 1 of the fuzzy controller with three linguistic values for the different number of vehicles per hour.
Figure 2 presents the first input to fuzzy controller for junction 1 with three linguistic values.
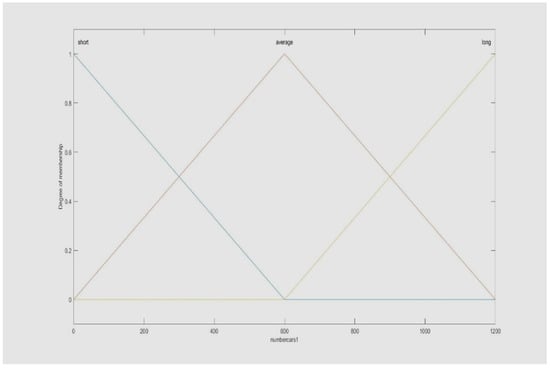
Figure 2.
First input to the fuzzy controller for junction 1 with three linguistic values.
Figure 3 is for the second input and is similar to Figure 2, but with different traffic flow (x-axis represents traffic flow in vehicles per hour).
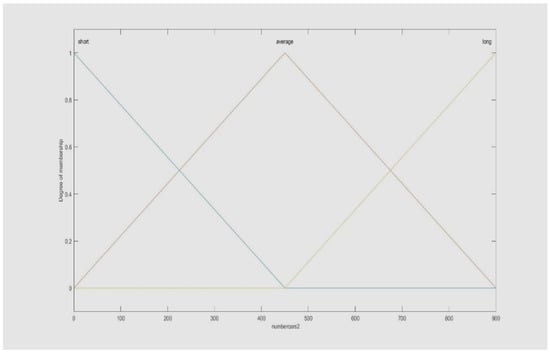
Figure 3.
Second input to fuzzy controller for junction 1 with three linguistic values.
Figure 3 presents the second input to fuzzy controller for junction 1 with three linguistic values.
Figure 4 presents the output from fuzzy controller for junction 1 with five linguistic values. The x-axis presents the duration of the cycle length which is the sum of green and red light. The yellow light is a constant, and for this reason, it is not considered.
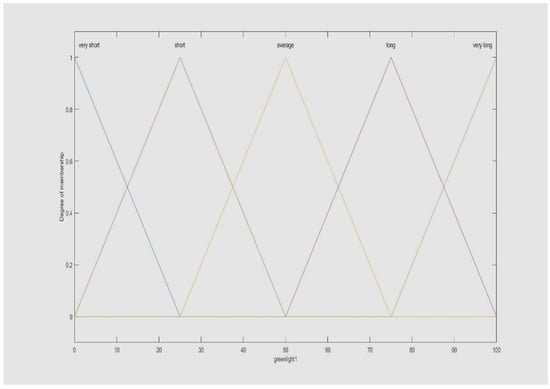
Figure 4.
Output from fuzzy controller for junction 1 with five linguistic values.
The control surface plot depicts two independent input variables (numbercars1 and numbercars2) and an output variable (greenlight1–duration of green light for Section 1)—Figure 5. The color of the surface is of no significant importance here as it corresponds to the value of the z axis—the lower the value, the colder the color, and the higher the value, the hotter the color. Mainly, there are three colors: blue, green, and yellow for low, middle, and high values of the duration of the green light for Section 1, respectively. The control surface plot is uneven. It has peaks and valleys caused by the heuristic rules that are defined.
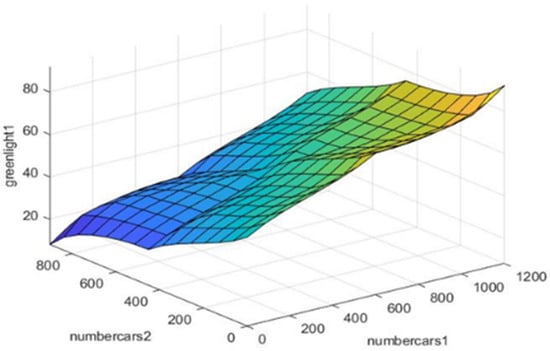
Figure 5.
Surface of the fuzzy controller with one output and two inputs for junction 1.
The MATLAB code of fuzzy controller for junction 1 is given bellow. There are two inputs (NumInputs), one output (NumOutputs), and nine rules based on expert knowledge (NumRules). The first input represents the main street with traffic flow of 1200 vehicles per hour (Range = [0 1200]). This input has a triangular membership function with three intervals. The second input represents the opposite street of the intersection which has lower traffic flow of 900 vehicles per hour (Range = [0 900]) and the same number of intervals for the membership function but with different values due to the different traffic flow. The output represents the duration of the green light for the first street (main street). The duration of the green light is in the range 0 to 100 s (Range = [0 100]). The triangular membership function has five intervals presented in the code form MF1 to MF5. After the green light for the main street is calculated, a simple formula is used to calculate the green light duration of the opposite street. The green light duration of the opposite street is equal to 100 minus the green light duration of the main street.
| Name = ‘junction1’ |
| Type = ‘mamdani’ |
| Version = 2.0 |
| NumInputs = 2 |
| NumOutputs = 1 |
| NumRules = 9 |
| AndMethod = ‘min’ |
| OrMethod = ‘max’ |
| ImpMethod = ‘min’ |
| AggMethod = ‘max’ |
| DefuzzMethod = ‘centroid’ |
| [Input1] |
| Name = ‘numbercars1’ |
| Range = [0 1200] |
| NumMFs = 3 |
| MF1 = ‘short’:’trimf’, [0 0 600] |
| MF2 = ‘average’:’trimf’, [0 600 1200] |
| MF3 = ‘long’:’trimf’, [600 1200 1200] |
| [Input2] |
| Name = ‘numbercars2’ |
| Range = [0 900] |
| NumMFs = 3 |
| MF1 = ‘short’:’trimf’, [0 0 450] |
| MF2 = ‘average’:’trimf’, [0 450 900] |
| MF3 = ‘long’:’trimf’, [450 900 900] |
| [Output1] |
| Name = ‘greenlight1’ |
| Range = [0 100] |
| NumMFs = 5 |
| MF1 = ‘very short’:’trimf’, [0 0 25] |
| MF2 = ‘short’:’trimf’, [0 25 50] |
| MF3 = ‘average’:’trimf’, [25 50 75] |
| MF4 = ‘long’:’trimf’, [50 75 100] |
| MF5 = ‘very long’:’trimf’, [75 100 100] |
| [Rules] |
| 1 1, 3 (1): 1 |
| 1 2, 2 (1): 1 |
| 1 3, 1 (1): 1 |
| 2 1, 4 (1): 1 |
| 2 2, 3 (1): 1 |
| 2 3, 2 (1): 1 |
| 3 1, 5 (1): 1 |
| 3 2, 4 (1): 1 |
| 3 3, 3 (1): 1 |
The Rules for junction 1 are:
- If (numbercars1 is short) and (numbercars2 is short) then (greenlight1 is average)
- If (numbercars1 is short) and (numbercars2 is average) then (greenlight1 is short)
- If (numbercars1 is short) and (numbercars2 is long) then (greenlight1 is very short)
- If (numbercars1 is average) and (numbercars2 is short) then (greenlight1 is long)
- If (numbercars1 is average) and (numbercars2 is average) then (greenlight1 is average)
- If (numbercars1 is average) and (numbercars2 is long) then (greenlight1 is short)
- If (numbercars1 is long) and (numbercars2 is short) then (greenlight1 is very long)
- If (numbercars1 is long) and (numbercars2 is average) then (greenlight1 is long)
- If (numbercars1 is long) and (numbercars2 is long) then (greenlight1 is average)
The design of the fuzzy controller for junction 2 is similar to the fuzzy controller for junction 1, except for the range values for the inputs. The rules for the fuzzy controller for junction 2 are equivalent the rules for junction 1.
The MATLAB code of fuzzy controller for junction 2 is identical to the MATLAB code of junction 1 with different inputs for the range. As in the case of junction 1, there are two inputs (NumInputs), one output (NumOutputs), and nine rules based on expert knowledge (NumRules) for junction 2. The first input represents the main street with a flow of 1700 vehicles per hour (Range = [0 1700]). This input has a triangular membership function with three linguistic values. The second input represents the opposite street of the intersection, which has a lower traffic flow of 210 vehicles per hour (Range = [0 210]) and the same number of intervals for the membership function but with different values due to the different traffic flow. The output represents the duration of the green light for the first street (main street). The duration of the green light is in the range 0 to 100 s (Range = [0 100]), as in the case with junction 1, and the calculations for the output are identical to the calculations for junction 1.
A better illustration is presented on the chart of Figure 6 for the fuzzy controller of junction 2 with inputs, output, and the surface of the whole fuzzy system. Figure 6 shows the first input to the fuzzy controller for junction 2 with three linguistic values.
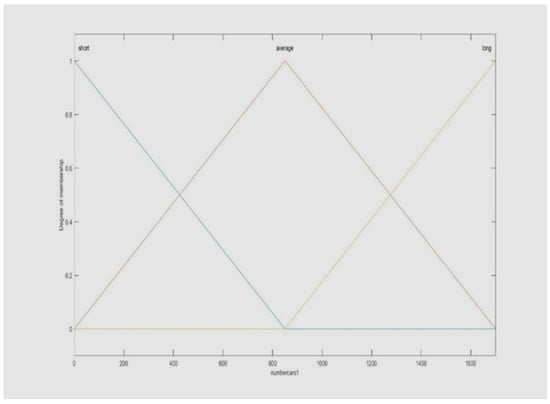
Figure 6.
First input to fuzzy controller for junction 2 with three linguistic values.
Figure 7 shows the second input to fuzzy controller for junction 2 with three linguistic values.
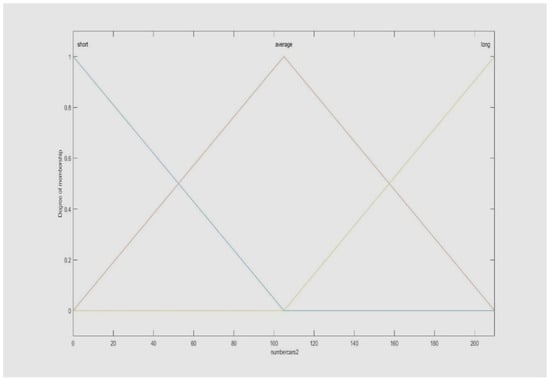
Figure 7.
Second input to fuzzy controller for junction 2 with three linguistic values.
Figure 8 shows the output from fuzzy regulator for junction 2 with five linguistic values.
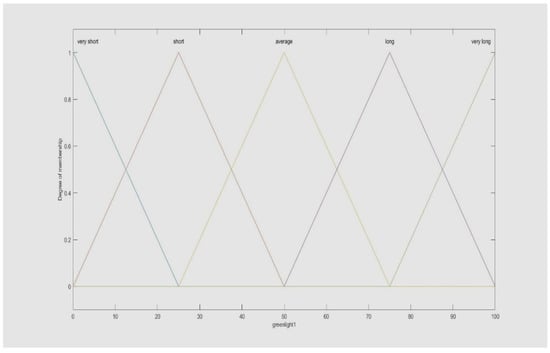
Figure 8.
Output from fuzzy regulator for junction 2 with five linguistic values.
The second output of the fuzzy system u2 is calculated using Equation (1).
Figure 9 presents the control surface plot of Mamdani fuzzy system for junction 2. The description of the surface is similar to Figure 5 but with different input values.
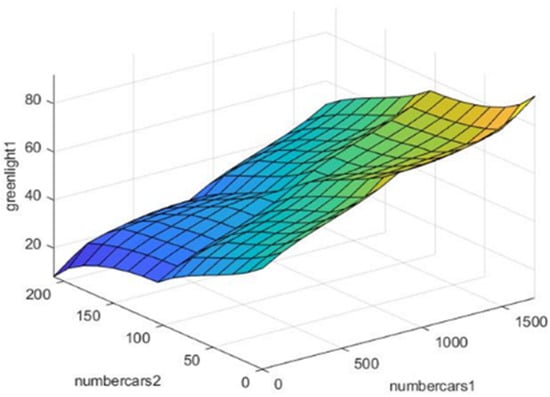
Figure 9.
Surface of the fuzzy controller with one output and two inputs for junction 2.
3. Design of Conventional Controller
The conventional controller is designed analytically under the assumption that the ratio between the green light durations for the two sections u1 for Section 1 and u2 for Section 2, which should be equal to the ratio between e1 and e2. In this case, e1 is number of cars for Section 1 and e2 is number of cars for Section 2, see Figure 10. In this case, the conventional controller is defined by the following system of algebraic equations with two unknowns:
e1/e2 = u1/u2
u2 = 100 − u1
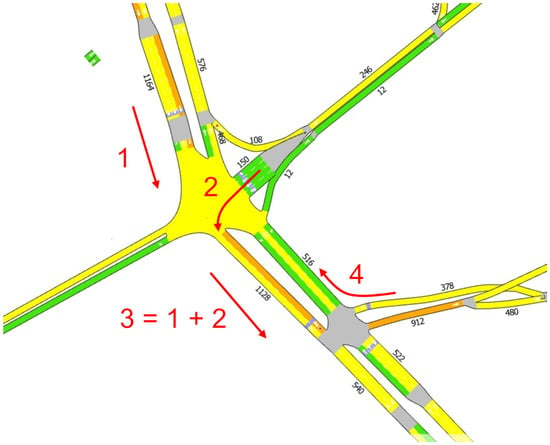
Figure 10.
Network of two junctions regulated by traffic lights.
Equation (3) for the conventional controller is identical with Equation (1) for the fuzzy controller. However, the presentation format used in this section shows the way in which the system of algebraic equations could be solved, i.e., by replacing u2 from Equation (3) in Equation (2) [18,19].
4. Results and Discussion
The developed controllers are used in the context of defining of signal timing in a network of two junctions—junction 1 and junction 2. The model of the network of junctions is presented on Figure 10. Junction 1 presents the flows 1 and 2, which join in flow 3. Flow 3 and flow 4 are presented in junction 2.
The traffic simulation software Aimsun was used for the experiments. Table 1 shows the results for junction 1 in terms of traffic flow and duration of green light for the fuzzy and the conventional controllers.

Table 1.
Results of traffic simulation for junction 1.
It took three iterations for both controllers for junction 1 to reach saturation in terms of traffic flow. Iteration lasts for one hour so that the numbers under e1 and e2 present the vehicles per hour [18,19].
Table 2 shows the results for junction 2 in terms of traffic flow and duration of green light for the fuzzy and the conventional controllers. It took three iterations for the fuzzy controller for junction 2 to reach saturation in terms of traffic flow, and it took five iterations for the conventional controller for junction 2 to reach saturation in terms of traffic flow.
Table 2.
Results of traffic simulation for junction 2.
From Table 1 and Table 2, it is obvious that the fuzzy controller performs better for junction 2, whereas for junction 1, both controllers perform similarly. This evaluation is given on the basis of the number of iterations each controller needs to reach saturation. In this way, a lower number of controller iterations leads to faster clearance of traffic flow from the intersection.
Figure 11 presents total trave time indicator—a comparison between the fuzzy and conventional controller. The x-axis presents the iterations for fuzzy and the conventional controller. The y-axis presents the total travel time in hours for all vehicles that traveled the network.
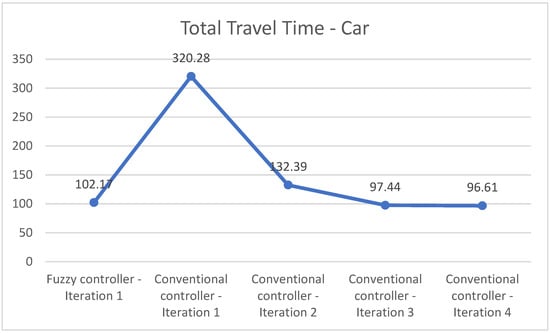
Figure 11.
Total travel time for fuzzy and conventional controller for each iteration.
As becomes obvious from Figure 11, the fuzzy controller performs better compared to the conventional controller because it provides higher network throughput and needs only one iteration to reach a steady state, while the same performance of the conventional controller is reached after three iterations.
5. Conclusions
The aim of this paper is to present the performance of two types of controllers in an oversaturated urban network for the modeling and simulation of a traffic light control system with feedback. The paper focuses on the design of fuzzy and conventional controllers, which are tested separately in AIMSUN platform for modeling and traffic simulation in case of an oversaturated urban network. The fuzzy controller performs better in both experiments for junction 1 and junction 2 in comparison to the conventional controller. This is because the fuzzy controller provides higher network throughput and needs only one iteration to reach a steady state, while the steady state of the conventional controller is reached after three iterations. The fuzzy controller also reaches faster saturation in both experiments in comparison to the conventional controller. The novelty in the paper is in the design and simulation of a traffic light control system that uses feedback from the number of cars on the crossroads to determine the duration of the green light.
Similar experiments as the ones presented here are performed for undersaturated traffic conditions in [19]. Future research will investigate larger traffic networks.
Author Contributions
Conceptualization, B.V. and Y.B.; methodology, B.V.; software, B.V. and Y.B.; validation, B.V. and Y.B.; formal analysis, B.V.; investigation, B.V.; resources, Y.B.; data curation, B.V. and Y.B.; writing—original draft preparation, B.V. and Y.B; writing—review and editing, B.V.; visualization, B.V.; supervision, B.V.; project administration, B.V.; funding acquisition, Not applicable. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by Project KP-06-H37/6, 6.12.2019: “Modelling and optimization of urban traffic in network of crossroads” with the Bulgarian National Science Fund.
Data Availability Statement
Not applicable.
Acknowledgments
© 2022 Yordanka Boneva, Boriana Vatchova, Alexander Gegov. Reproduced with permission from "Fuzzy Control of Traffic Junctions in Oversaturated Urban Networks.” IFAC-PapersOnLine, 55/11 (2022), pp. 144–149.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Lu, J.; Chen, F.; Ma, V. Signal Timing for an Isolated Intersection Based on the Two-Stage Fuzzy Logic Controller. Adv. Eng. Res. 2018, 127, 111–114. [Google Scholar] [CrossRef]
- Murat, S.Y.; Gedizlioglu, E. A fuzzy logic multi-phased signal control model for isolated junctions. Transp. Res. Part C Emerg. Technol. 2005, 13, 19–36. [Google Scholar] [CrossRef]
- Dobrota, N.; Mitrovic, N.; Gavric, S.; Stevanovic, A. Comprehensive Data Analysis Approach for Appropriate Scheduling of Signal Timing Plans. Future Transp. 2022, 2, 27. [Google Scholar] [CrossRef]
- Liao, Z.; Xiao, H.; Liu, S.; Liu, Y.; Yi, A. Impact Assessing of Traffic Lights via GPS Vehicle Trajectories. ISPRS Int. J. Geo-Inf. 2021, 10, 769. [Google Scholar] [CrossRef]
- Alemdar, K.D.; Tortum, A.; Kaya, Ö.; Atalay, A. Interdisciplinary Evaluation of Intersection Performances—A Microsimulation-Based MCDA. Sustainability 2021, 13, 1859. [Google Scholar] [CrossRef]
- Rahmani, A.M.; Naqvi, R.A.; Yousefpoor, E.; Yousefpoor, M.S.; Ahmed, O.H.; Hosseinzadeh, M.; Siddique, K. A Q-Learning and Fuzzy Logic-Based Hierarchical Routing Scheme in the Intelligent Transportation System for Smart Cities. Mathematics 2022, 10, 4192. [Google Scholar] [CrossRef]
- Elbaum, Y.; Novoselsky, A.; Kagan, E. A Queueing Model for Traffic Flow Control in the Road Intersection. Mathematics 2022, 10, 3997. [Google Scholar] [CrossRef]
- Pavlova, K.; Stoilov, T.; Stoilova, K. Bi-level model for public rail transportation under incomplete data. J. Cybern. Inf. Technol. 2017, 17, 75–91. [Google Scholar] [CrossRef]
- Stoilova, K.; Stoilov, T. Bi-level optimizatio application for urban traffic management. Annals of Computer science and Information Systems. In Proceedings of the 2020 Federated Conference on Computer Science and Information Systems, Sofia, Bulgaria, 6–9 September 2020; Volume 21, pp. 327–336. [Google Scholar] [CrossRef]
- Trichkova-Kashamova, E. Modeling and optimization of traffic flows in a network. Proceedings of International Conference Automatics and Informatics—ICAI, Varna, Bulgaria, 1–3 October 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Lee, J.-H.; Lee, K.-M.; Lee-Kwang, H. Fuzzy controller for intersection group. In Proceedings of the IEEE Conference on Industrial Automation and Control Emerging Technology Applications, Taipei, Taiwan, 22–27 May 1995; IEEE Xplore: Piscataway, NJ, USA, 2002; pp. 376–382. [Google Scholar] [CrossRef]
- Yulianto, B. Application of fuzzy logic to traffic signal control under mixed traffic conditions. Traffic Eng. Control 2003, 44, 332–336. [Google Scholar]
- Papageorgiou, M.; Diakaki, C.; Dinopoulou, V.; Kotsialos, A.; Wang, Y. Review of road traffic control strategies. Proc. IEEE 2003, 91, 2043–2067. [Google Scholar] [CrossRef]
- Papageorgiou, M.; Kotsialos, A. Freeway ramp metering: An overview. IEEE Trans. Intell. Transp. Syst. 2003, 3, 271–281. [Google Scholar] [CrossRef]
- Azarafza, M.; Akgün, H.; Feizi-Derakhshi, M.; Azarafza, M.; Rahnamarad, J.; Derakhshani, R. Discontinuous rock slope stability analysis under blocky structural sliding by fuzzy key-block analysis method. Heliyon 2020, 6, e03907. [Google Scholar] [CrossRef] [PubMed]
- Azarafza, M.; Asghari-Kaljahi, E.; Ghazifard, A.; Akgün, H. Application of fuzzy expert decision-making system for rock slope block-toppling modeling and assessment: A case study. Model. Earth Syst. Environ. 2021, 7, 159–168. [Google Scholar] [CrossRef]
- Fuzzy Logic Toolbox—MATLAB. Available online: www.mathworks.com (accessed on 22 November 2022).
- Boneva, Y.; Vatchova, B.; Gegov, A. Fuzzy Control of Traffic Junctions in Oversaturated Urban Networks. Proceedings of IFAC Workshop on Control for Smart Cities—CSC 2022, Sozopol, Bulgaria, 27–30 June 2022; IFAC: New York, NY, USA, 2022; Volume 55, pp. 144–149. [Google Scholar] [CrossRef]
- Vatchova, B.; Mo, A.; Boneva, Y.; Gegov, A. Fuzzy Control of Traffic Junctions in Undersaturated Urban Networks. In Proceedings of the IEEE International Black Sea Conference on Communications and Networking—IEEE BlackSeaCom 2022, Sofia, Bulgaria, 6–9 June 2022; IEEE Xplore: Piscataway, NJ, USA, 2022; pp. 96–101. [Google Scholar] [CrossRef]
- Gegov, A. Distributes Fuzzy Control of Multivariable Systems; International Series in Intelligent Technologies (ISIT); Springer: Berlin/Heidelberg, Germany, 1996; Volume 6, pp. 1–186. ISBN 978-94-015-8640-5. [Google Scholar] [CrossRef]
- Gegov, A. Complexity Management in Fuzzy Systems; Studies in Fuzziness and Soft Computing (STUDFUZZ); Springer: Berlin/Heidelberg, Germany, 2007; Volume 211, pp. 1–249. ISBN 978-3-540-38885-2. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).