

A Predictive Maintenance Strategy for Multi-Component Systems Based on Components’ Remaining Useful Life Prediction



Abstract
:1. Introduction
- (1)
- We propose a data and model fusion method for accurately predicting the remaining useful life (RUL) of components in multi-component systems. Our approach utilizes particle filtering to develop an RUL prediction model that continuously updates and refines degradation parameters based on sensor data. This enables more accurate RUL predictions compared to traditional methods.
- (2)
- Additionally, we introduce an optimized maintenance model aimed at minimizing maintenance costs. By considering RUL thresholds of individual components, our model determines optimal maintenance actions for each component, improving overall system efficiency and cost-effectiveness. Moreover, we address the limitations of focusing solely on individual components by proposing an integrated system-wide maintenance strategy. This strategy incorporates opportunistic maintenance, scheduling proactive actions based on predicted RUL information to significantly reduce total system maintenance costs.
- (3)
- To validate our strategy, we conducted experiments using open-source lithium-ion batteries at the NASA PCoE Center. The empirical validation provides real-world evidence supporting the effectiveness and applicability of our proposed strategy in multi-component systems.
2. Literature Review
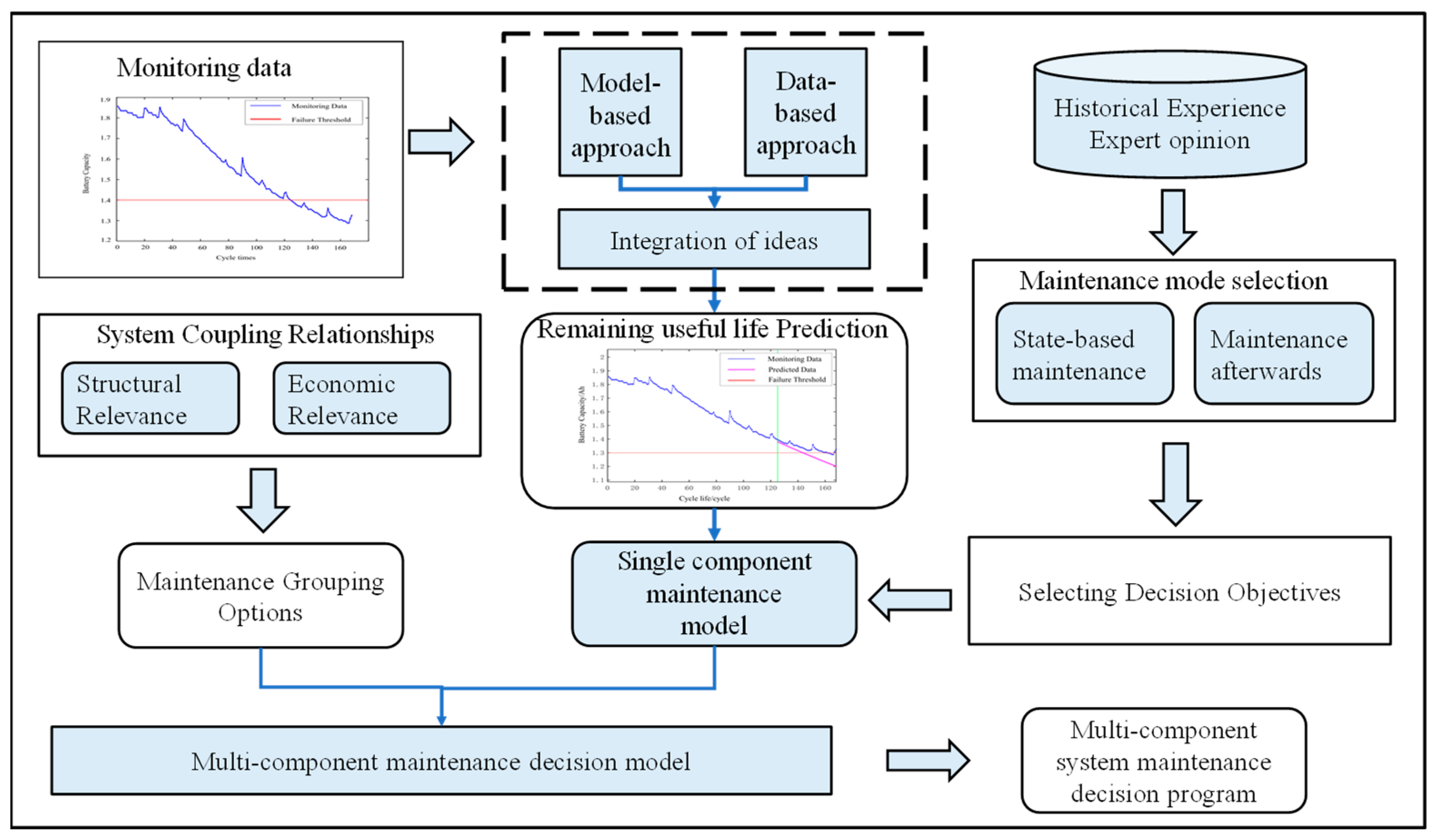
3. Framework of the Proposed System
- (1)
- The system under consideration comprises one independent component, where the failure of one component does not affect the reliability of others.
- (2)
- External environmental factors are disregarded during system operation analysis. Specifically, we focus solely on two distinct maintenance activities: preventive replacement and failure replacement. Following any maintenance intervention, the condition of the respective component immediately reverts to brand new status with a perfect restoration effect.
- (3)
- Economic considerations come into play when evaluating maintenance strategies for multi-component systems. The cost associated with the simultaneous maintenance of different components is not merely an accumulation of individual component costs. In this study, each instance of maintenance results in system downtime and incurs a fixed configuration cost denoted as S. This cost includes lost production due to downtime, utility expenses, and preparation costs related to setting up overhaul equipment [31]. Importantly, S is independent of the maintenance cost associated with any specific component. Moreover, if opportunistic maintenance is carried out whereby some components are replaced prematurely at the expense of their remaining useful life, additional losses may arise as a consequence.
- (1)
- To accurately predict the remaining service life of components, a sophisticated approach combining number–model fusion and particle filtering theory is implemented. This method leverages actual monitoring data to model component degradation and estimate the failure probabilities. The optimal moment for maintenance, denoted as , is determined by selecting the more cost-efficient option between preventive and non-preventive replacement costs based on the predicted probability of component failure.
- (2)
- It is assumed that maintenance execution time is minimal, resulting in instantaneous actions. Any downtime experienced during maintenance can be quantified as a fixed configuration cost S, encompassing utility expenses, lost production opportunities, and overhaul-related expenditures. Thus, each instance of maintenance incurs this fixed configuration cost S. On the other hand, preventive replacement costs encompass all expenses associated with proactive maintenance measures such as component replacements, spare parts inventory management, and reservation expenses.
- (3)
- Recognizing that sudden component failures can lead to undesirable system downtime consequences, emphasis is placed on avoiding such scenarios through proactive preventive replacement actions. If preventive replacement is not carried out at some future time point t, implying an increased risk of component failure, conducting an assessment of expected costs associated with not opting for preventive replacement becomes necessary. This evaluation encompasses both failure replacement costs and potential financial losses due to the unavailability of spare parts.
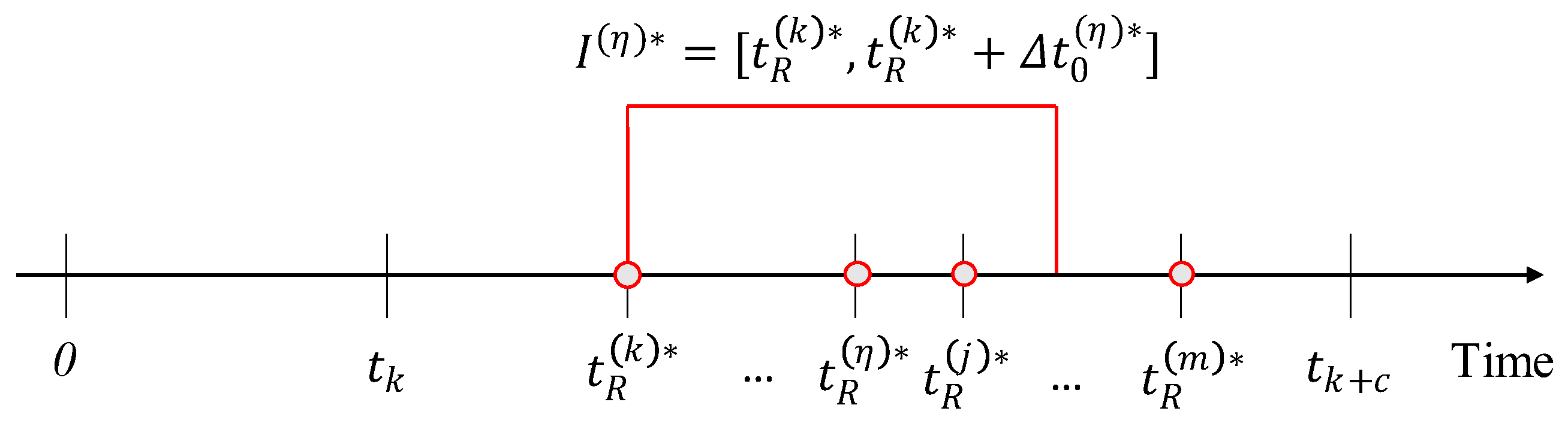
- (4)
- During the maintenance process of a single component within a multi-component system, there exists an opportunity to perform additional maintenance on other components while the entire system comes to a halt temporarily. For instance, when maintaining component k at its optimal moment , if there exists another component η whose optimal moment falls within the interval , an opportunity for maintenance on component η at the system level arises. Here, represents the time threshold at which minimizing setup costs S can be achieved, consequently reducing the overall maintenance cost of the system.
- (5)
- The combination of components for opportunity maintenance in a multi-component system can be organized into a grouping structure. Each part’s preventive replacement cost within this opportunity maintenance grouping remains as , but certain parts may have their service life partially wasted due to earlier maintenance moments, resulting in increased penalty costs denoted as , per unit time. By quantifying cost savings, we determine the optimal maintenance grouping.
3.1. RUL Prediction Based on Particle Filtering Algorithm
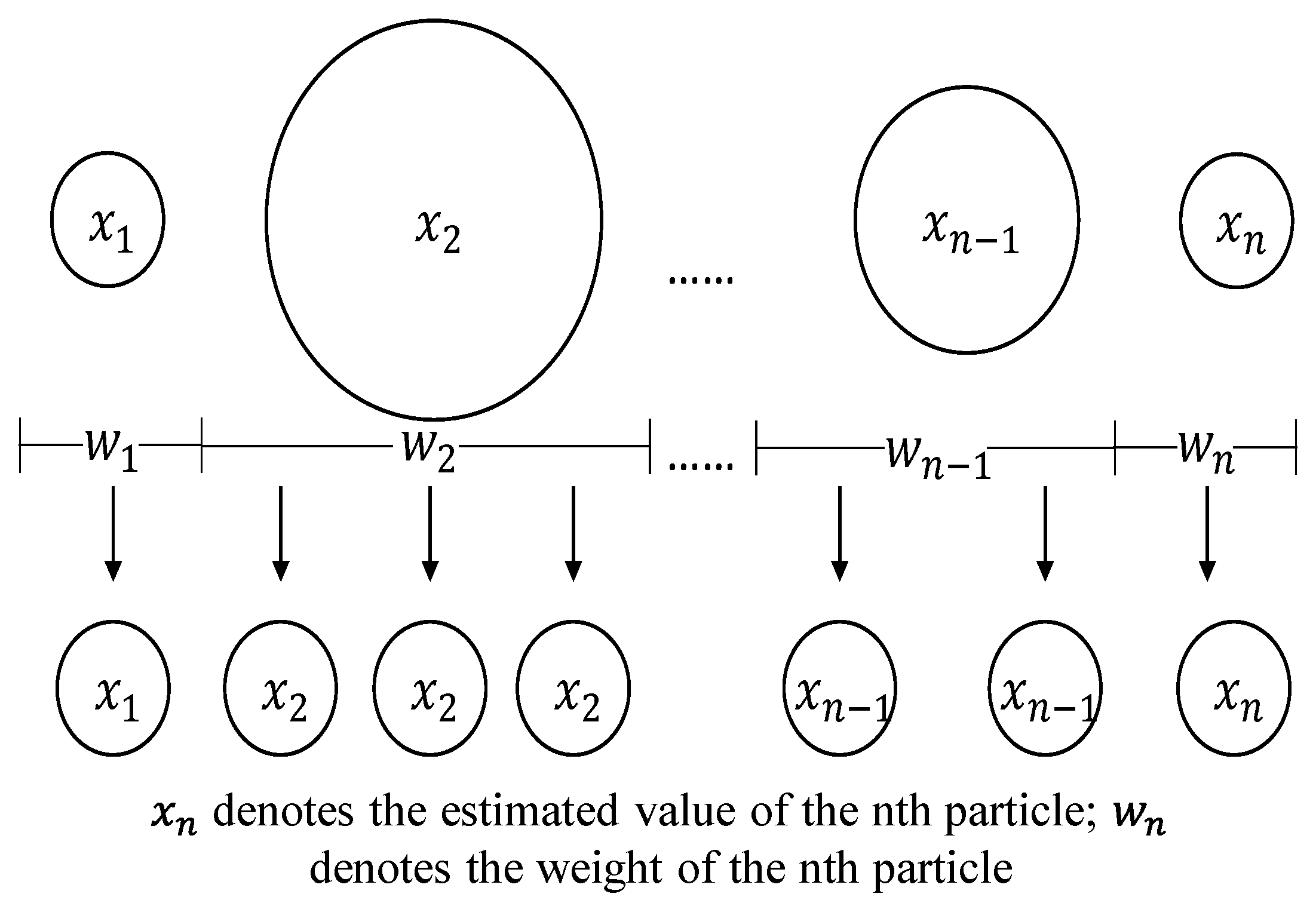
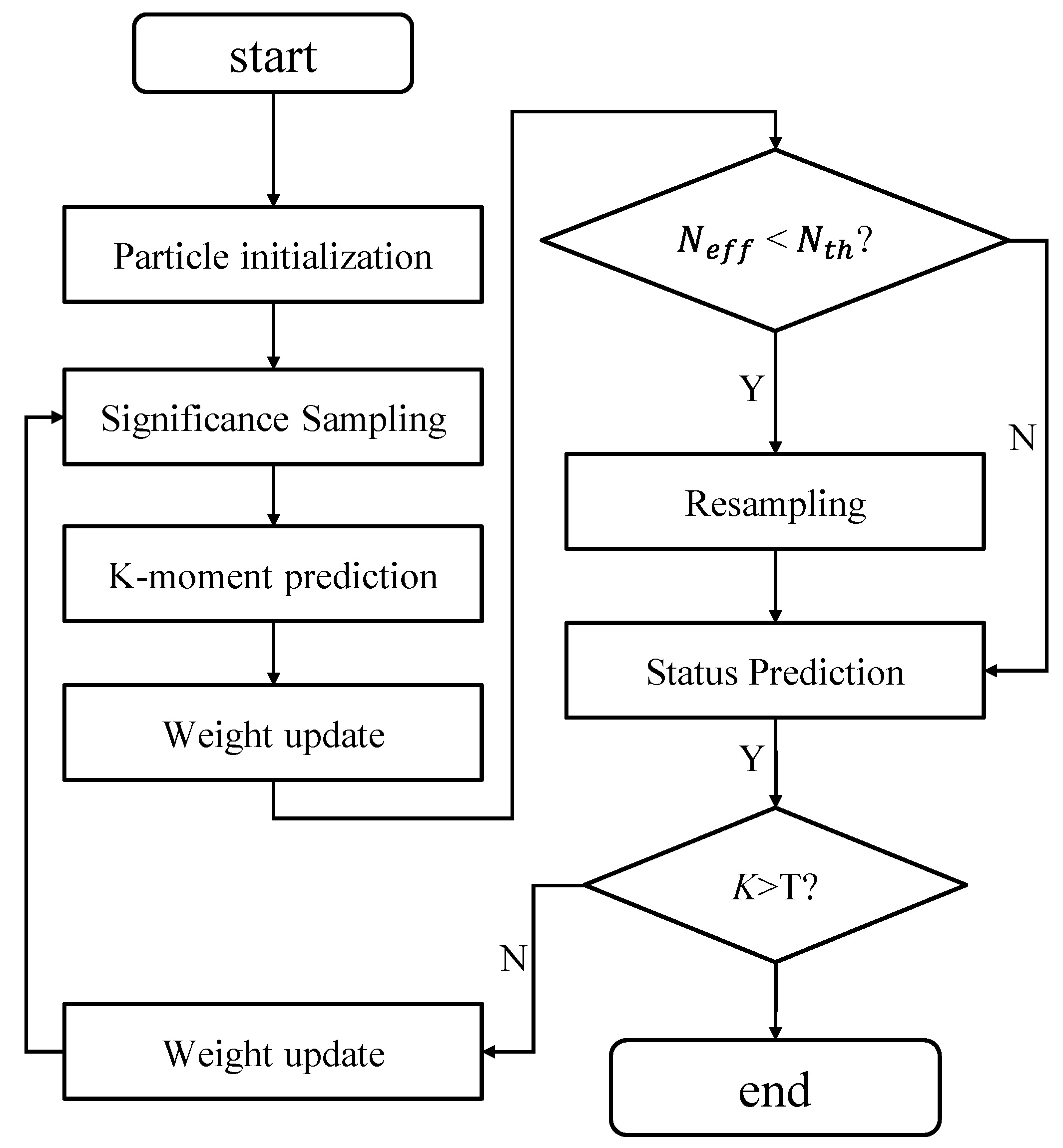
- (1)
- Initialization: at the moment , the set of particles is generated from the known a priori probability of the system state, , and the initial weights of all the particles are all .
- (2)
- Importance sampling and weights calculation: at the moment k > 0, according to , the particle weights can be updated as , where , and the weights are normalized .
- (3)
- Resampling: according to the effective sampling scale of resampling and preset to determine whether to resample combined with the weights obtained in (2), copy the particles with larger weights and eliminate the particles with smaller weights to obtain the new set of particles ; the weights of each particle are all .
- (4)
- Output state estimate: .
- (5)
- Judge the number of times the algorithm is executed: if ( is the number of known observations), exit this algorithm; otherwise, and return to (2).
- (1)
- Determine the initial parameters of the degradation model using the MATLAB data fitting tool;
- (2)
- Execute the particle filtering algorithm using the parameters obtained from 1) and the degradation data monitored by the sensors (battery capacity data from installation to use up to the th cycle) to update the particle set in real time, where and .
- (3)
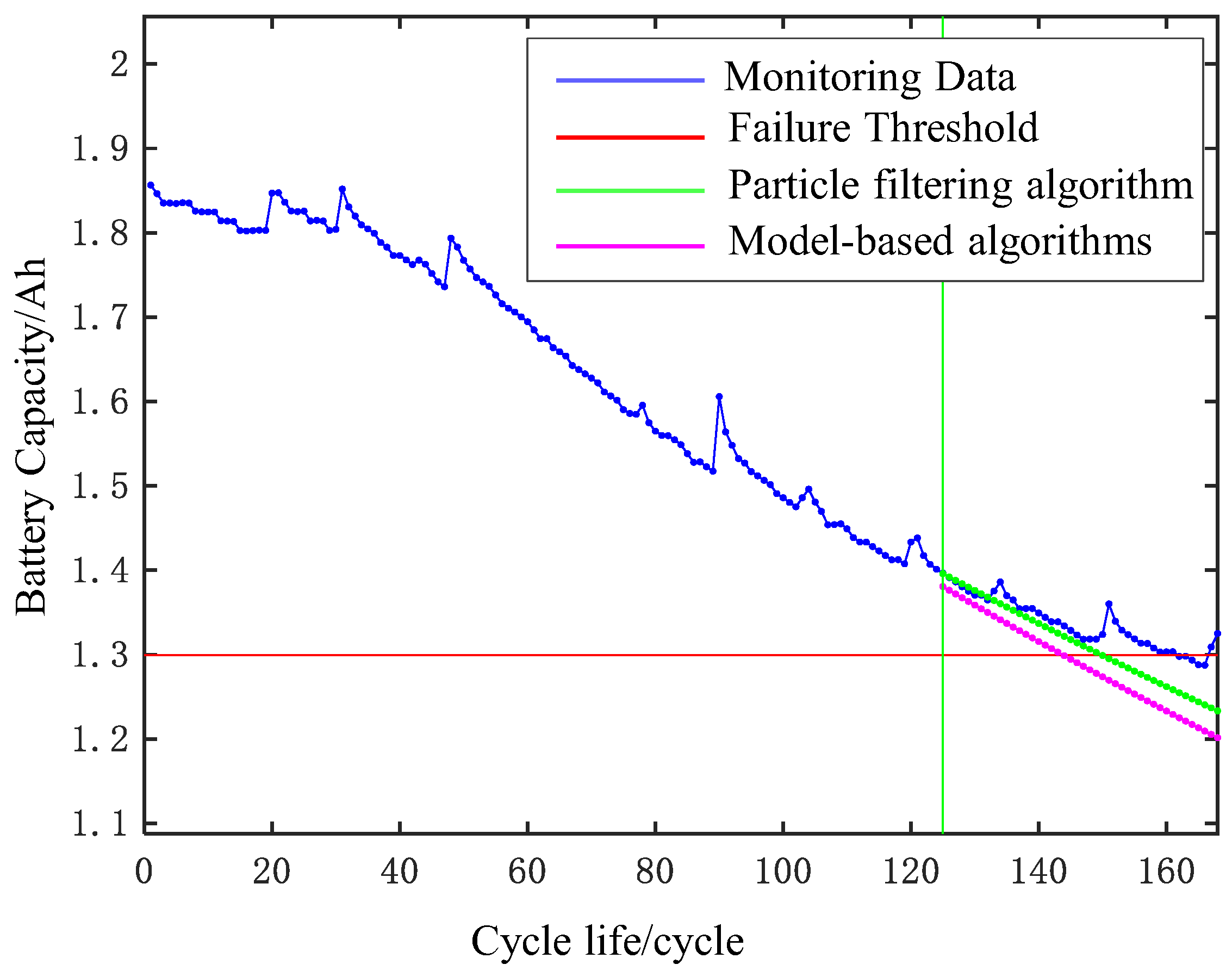
- Applying the particle filtering algorithm in (2), we update the model parameters at different cycle periods until we reach the th cycle, at which point the predicted value of the battery capacity of the ith particle at the kth cycle forward steps is calculated as follows:
- (4)
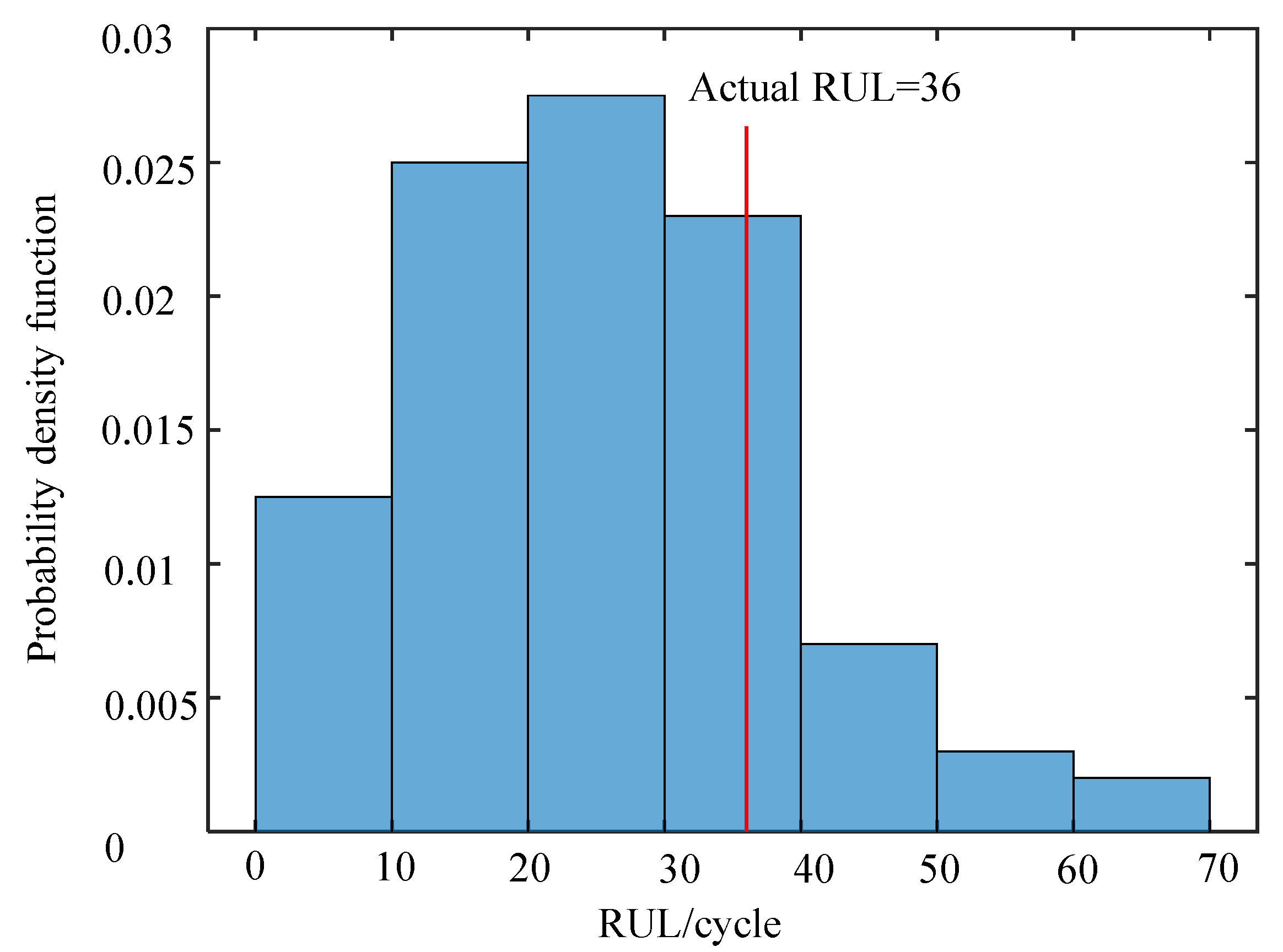
- From Equation (9), the battery RUL is the number of cycles from the current number of cycles to the first time the battery reaches its life threshold, assuming a life threshold of 0.72 Ah; then, we calculate the estimate of the RUL of the ith particle at the th cycle:
3.2. Single Component Maintenance Model
- (1)
- If we perform preventive replacement maintenance operation at some future h moment, the total cost of performing maintenance is denoted as , where denotes the preventive replacement cost and denotes the fixed configuration cost incurred for each performed maintenance.
- (2)
- If we do not consider performing preventive replacement in the future h moments, the system will not bear the preventive replacement cost from the current moment to the future h moments, but there is a risk of failure due to sudden failure of internal components at h moments and in the subsequent period, in which case we must consider the occurrence of non-preventive replacement operations, and we denote the expected cost of non-preventive replacement as , which includes the replacement cost due to unexpectedly caused sudden failures. The fixed configuration cost denotes the predicted probability of failure of the obtained component at moment h, denotes the sum of the failure replacement cost and the spare parts out-of-stock cost, and denotes the fixed configuration cost.
- (1)
- If the predicted moment for executing maintenance based on our strategy precedes the actual failure moment of a part, preventive replacement activities can be carried out. In such cases, spare parts are readily available as they have been scheduled in advance. The MCR for this part η can be calculated using the following equation:
- (2)
- If the actual moment of failure of the part is earlier than the predictive maintenance moment (which rarely happens because it would imply a large error in the prediction), then the failure replacement maintenance activity must be performed immediately for the part, in which case the non-preventive replacement cost must be paid because no spare parts are scheduled. In this case, the maintenance cost rate of the component is given by the following equation:where denotes the actual moment of failure of the component.
3.3. Opportunity Maintenance Cost Model
- (1)
- The optimal maintenance moment of the component ;
- (2)
- The moment of opportunity maintenance of the system;
- (3)
- The penalty cost per unit time of the component η.
4. Experimental Study and Results
4.1. Experiment Description
4.2. Remaining Useful Life Prediction
4.3. Analysis of Maintenance Strategies
- (1)
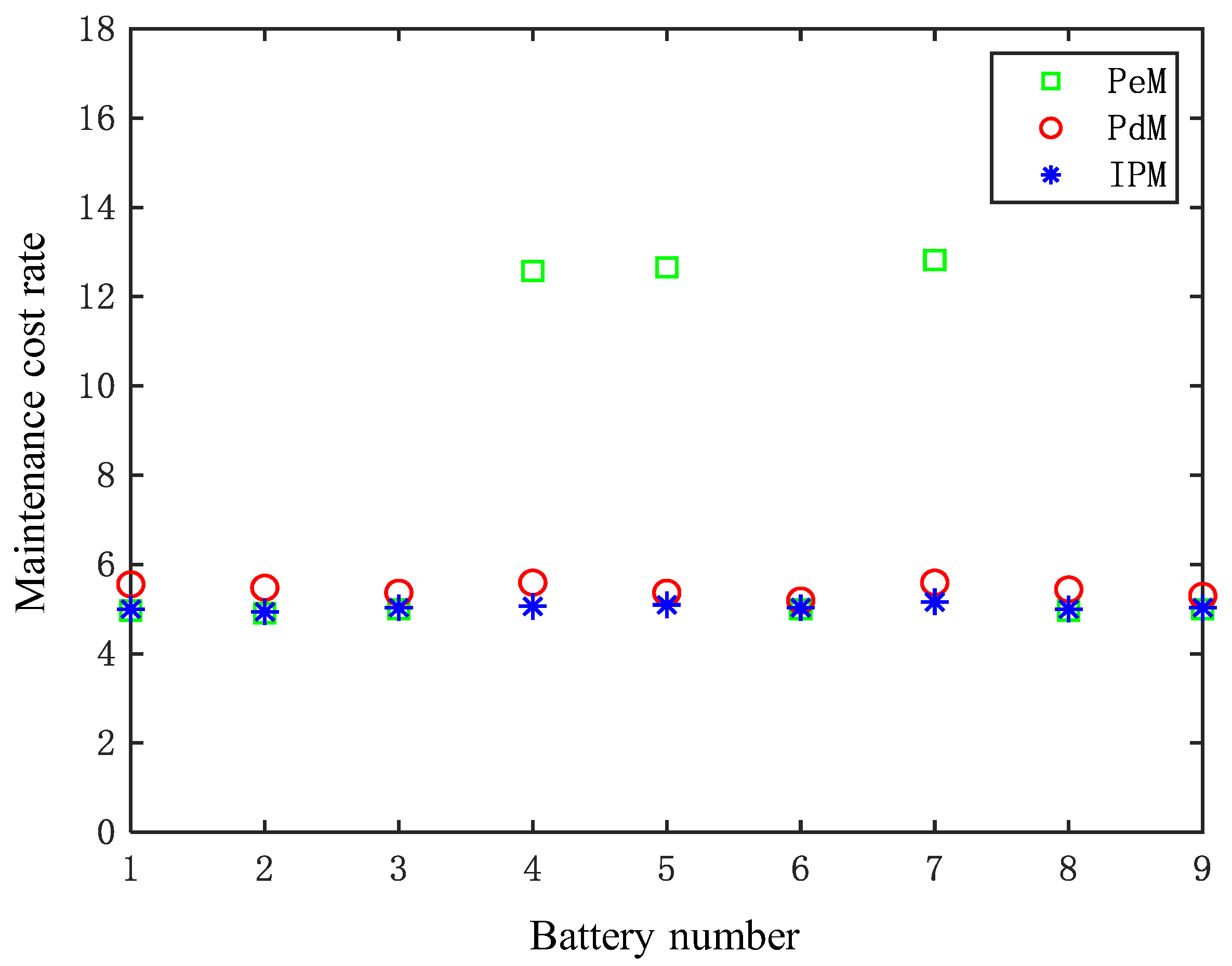
- Periodic preventive maintenance strategy, which is executed when based on the historical reliability data of components. Specifically, the average failure time of components is first obtained using the historical reliability data of multiple components, and then periodic preventive maintenance with a cost of is executed at time as follows:where denotes taking the smallest integer greater than or equal to the real number x.
- (2)
- Ideal predictive maintenance strategy, which is executed based on the assumption of perfectly predicted failure times. In this case, we assume that the remaining life is accurately predicted; then, the maintenance execution moment should be one cycle before the actual failure moment of the component.
5. Conclusions
- (1)
- Based on economic correlations within multi-component systems, component remaining useful life (RUL) predictions, and cost-based maintenance approaches, this study presents an integrated maintenance model that incorporates appropriate assumptions and provides a comprehensive analysis of the overall maintenance strategy. Additionally, we employ a particle-filter-based RUL prediction technique in this paper, which combines model and data-driven approaches to achieve enhanced prediction performance. This approach offers significant advantages over traditional model-based methods.
- (2)
- The proposed methodology is validated through an empirical analysis conducted on lithium battery group data. The findings demonstrate that the RUL prediction method presented in this paper outperforms traditional model-based methods in terms of accuracy. Furthermore, probability density function analysis offers valuable insights for determining optimal system maintenance moments. The suggested maintenance strategy allows for a more precise estimation of the optimal execution moment for opportunity-based maintenance within the system context. Compared to conventional periodic preventive measures, this approach can potentially reduce total system maintenance costs by approximately 45%.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhao, W.; Lv, Y.; Liu, J.; Lee, C.K.; Tu, L. Early fault diagnosis based on reinforcement learning optimized-SVM model with vibration-monitored signals. Qual. Eng. 2023, 1–16. [Google Scholar] [CrossRef]
- Lv, Y.; Zhao, W.; Zhao, Z.; Li, W.; Ng, K.K.H. Vibration signal-based early fault prognosis: Status quo and applications. Adv. Eng. Inform. 2022, 52, 101609. [Google Scholar] [CrossRef]
- Keizer, M.C.O.; Flapper, S.D.P.; Teunter, R.H. Condition-based maintenance policies for systems with multiple dependent components: A review. Eur. J. Oper. Res. 2017, 261, 405–420. [Google Scholar] [CrossRef]
- Peng, H.; Feng, Q.; Coit, D.W. Reliability and maintenance modeling for systems subject to multiple dependent competing failure processes. IIE Trans. 2010, 43, 12–22. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, X.; Zeng, J. Dynamic group-maintenance strategy for wind farms based on imperfect maintenance model. Ocean Eng. 2022, 259, 111311. [Google Scholar] [CrossRef]
- Zheng, P.; Zhao, W.; Lv, Y.; Qian, L.; Li, Y. Health Status-Based Predictive Maintenance Decision-Making via LSTM and Markov Decision Process. Mathematics 2023, 11, 109. [Google Scholar] [CrossRef]
- Liu, C.; Tang, D.; Zhu, H.; Nie, Q. A novel predictive maintenance method based on deep adversarial learning in the intelligent manufacturing system. IEEE Access 2021, 9, 49557–49575. [Google Scholar] [CrossRef]
- Kuncham, E.; Sen, S.; Kumar, P.; Pathak, H. An online model-based fatigue life prediction approach using extended Kalman filter. Theor. Appl. Fract. Mech. 2022, 117, 103143. [Google Scholar] [CrossRef]
- Guo, J.; Cai, J.; Jiang, H.; Li, X. Remaining useful life prediction for auxiliary power unit based on particle filter. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2020, 234, 2211–2217. [Google Scholar] [CrossRef]
- de León Hijes, F.G.; Robles, J.S.; García, F.M.; García, M.A. Dynamic Management of Periodicity between Measurements in Predictive Maintenance. Measurement 2023, 213, 112721. [Google Scholar] [CrossRef]
- Tsao, Y.C.; Vu, T.L. Electricity pricing, capacity, and predictive maintenance considering reliability. Ann. Oper. Res. 2023, 322, 991–1011. [Google Scholar] [CrossRef]
- Chen, C.; Wang, C.; Lu, N.; Jiang, B.; Xing, Y. A data-driven predictive maintenance strategy based on accurate failure prognostics. Eksploat. Iniezawodność—Maint. Reliab. 2021, 23, 387–394. [Google Scholar] [CrossRef]
- Lv, Y.; Guo, X.; Zhou, Q.; Qian, L.; Liu, J. Predictive maintenance decision-making for variable faults with non-equivalent costs of fault severities. Adv. Eng. Inform. 2023, 56, 102011. [Google Scholar] [CrossRef]
- Bouabdallaoui, Y.; Lafhaj, Z.; Yim, P.; Ducoulombier, L.; Bennadji, B. Predictive Maintenance in Building Facilities: A Machine Learning-Based Approach. Sensors 2021, 21, 1044. [Google Scholar] [CrossRef]
- Orth, P.; Yacout, S.; Adjengue, L. Accuracy and robustness of decision making techniques in condition based maintenance. J. Intell. Manuf. 2012, 23, 255–264. [Google Scholar] [CrossRef]
- Huynh, K.T.; Grall, A.; Bérenguer, C. Assessment of diagnostic and prognostic condition indices for efficient and robust maintenance decision-making of systems subject to stress corrosion cracking. Reliab. Eng. Syst. Saf. 2017, 159, 237–254. [Google Scholar] [CrossRef]
- Wang, H.; Lin, D.; Qiu, J.; Ao, L.; Du, Z.; He, B. Research on Multiobjective Group Decision-Making in Condition-Based Maintenance for Transmission and Transformation Equipment Based on D-S Evidence Theory. IEEE Trans. Smart Grid 2015, 6, 1035–1045. [Google Scholar] [CrossRef]
- Lin, L.; Luo, B.; Zhong, S. Development and application of maintenance decision-making support system for aircraft fleet. Adv. Eng. Softw. 2017, 114, 192–207. [Google Scholar] [CrossRef]
- Vališ, D.; Žák, L.; Pokora, O.; Lánský, P. Perspective analysis outcomes of selected tribodiagnostic data used as input for condition based maintenance. Reliab. Eng. Syst. Saf. 2016, 145, 231–242. [Google Scholar] [CrossRef]
- Zhang, C.; Qi, F.; Zhang, N.; Li, Y.; Huang, H. Maintenance policy optimization for multi-component systems considering dynamic importance of components. Reliab. Eng. Syst. Saf. 2022, 226, 108705. [Google Scholar] [CrossRef]
- Sheikhalishahi, M.; Azadeh, A.; Pintelon, L. Dynamic maintenance planning approach by considering grouping strategy and human factors. Trans. Inst. Chem. Eng. Process Saf. Environ. Prot. Part B 2017, 107, 289–298. [Google Scholar] [CrossRef]
- Van, P.D.; Barros, A.; Bérenguer, C.; Bouvard, K.; Brissaud, F. Dynamic grouping maintenance with time limited opportunities. Reliab. Eng. Syst. Saf. 2013, 120, 51–59. [Google Scholar] [CrossRef]
- Vu, H.C.; Do, P.; Barros, A.; Bérenguer, C. Maintenance grouping strategy for multi-component systems with dynamic contexts. Reliab. Eng. Syst. Saf. 2014, 132, 233–249. [Google Scholar] [CrossRef]
- Do, P.; Vu, H.C.; Barros, A.; Bérenguer, C. Maintenance grouping for multi-component systems with availability constraints and limited maintenance teams. Reliab. Eng. Syst. Saf. 2015, 142, 56–67. [Google Scholar] [CrossRef]
- Vu, H.C.; Do, P.; Barros, A. A study on the impacts of maintenance duration on dynamic grouping modeling and optimization of multicomponent systems. IEEE Trans. Reliab. 2018, 67, 1377–1392. [Google Scholar] [CrossRef]
- de Pater, I.; Mitici, M. Predictive maintenance for multi-component systems of repairables with Remaining-Useful-Life prognostics and a limited stock of spare components. Reliab. Eng. Syst. Saf. 2021, 214, 107761. [Google Scholar] [CrossRef]
- Alhourani, F.; Essila, J.; Farkas, B. Preventive maintenance planning considering machines’ reliability using group technology. J. Qual. Maint. Eng. 2023, 29, 136–154. [Google Scholar] [CrossRef]
- Carvalho, T.P.; Soares, F.A.; Vita, R.; Francisco, R.D.P.; Basto, J.P.; Alcalá, S.G. A systematic literature review of machine learning methods applied to predictive maintenance. Comput. Ind. Eng. 2019, 137, 106024. [Google Scholar] [CrossRef]
- Chang, F.; Zhou, G.; Zhang, C.; Xiao, Z.; Wang, C. A service-oriented dynamic multi-level maintenance grouping strategy based on prediction information of multi-component systems. J. Manuf. Syst. 2019, 53, 49–61. [Google Scholar] [CrossRef]
- Gorenstein, A.; Kalech, M. Predictive maintenance for critical infrastructure. Expert Syst. Appl. 2022, 210, 118413. [Google Scholar] [CrossRef]
- Shi, H.; Zeng, J. Real-time prediction of remaining useful life and preventive opportunistic maintenance strategy for multi-component systems considering stochastic dependence. Comput. Ind. Eng. 2016, 93, 192–204. [Google Scholar] [CrossRef]
- Nguyen, K.T.; Medjaher, K. A new dynamic predictive maintenance framework using deep learning for failure prognostics. Reliab. Eng. Syst. Saf. 2019, 188, 251–262. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbolic | Meaning |
|---|---|
| Single preventive replacement cost | |
| Single maintenance fixed configuration cost | |
| Sum of single-failure replacement cost and spare parts out-of-stock cost | |
| Penalty Costs | |
| Probability of failure of a single component at moment h | |
| The best time to maintain a single part | |
| Current monitoring moments | |
| Maintenance cost rate of component η | |
| Component η optimal opportunity maintenance time window threshold | |
| System maintenance cost rate considering opportunity maintenance | |
| Cost saving rate | |
| Number of parts that can be executed for maintenance | |
| A collection of parts that can be maintained by execution opportunities |
| Parameters | RMSE | R2 | ||||
|---|---|---|---|---|---|---|
| Value | 2.0750 | −0.0033 | −0.2613 | −0.0420 | 0.0194 | 0.9837 |
| Approach | Relative Error | |||
|---|---|---|---|---|
| Particle-filtering-based approach | 161 | 150 | 11 | 6.88% |
| Model-based approach | 161 | 143 | 18 | 11.18% |
| Relative Error | ||||
|---|---|---|---|---|
| 120 | 161 | 153 | 8 | 4.969% |
| 125 | 161 | 150 | 11 | 6.883% |
| 130 | 161 | 150 | 11 | 6.883% |
| 150 | 1500 | 1/10 | 142 | 4.58 |
| 300 | 1500 | 1/5 | 144 | 5.56 |
| 450 | 1500 | 3/10 | 147 | 6.56 |
| 600 | 1500 | 2/5 | 150 | 7.33 |
| Maintenance Strategy | Decision-Making | |
|---|---|---|
| Order Spare Parts | Maintenance Activities | |
| State-based maintenance strategy | Spare parts are not ordered | Do not perform maintenance |
| The maintenance strategy proposed in our paper | Predicted to order spare parts in cycle 134 | Predicted to perform at cycle 144 Replacement |
| System | Component | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 144 | 30 | - | 16.40 | 12.01 | 670 | 4.65 | 3 | ||
| 146 | 40 | 12.5 | ||||||||
| 149 | 50 | 10 | ||||||||
| 2 | 143 | 30 | - | 16.16 | 14.57 | 260 | 1.82 | 2 | ||
| 149 | 40 | 12.5 | ||||||||
| 154 | 50 | 10 | ||||||||
| 3 | 143 | 30 | - | 16.33 | 13.71 | 440 | 3.08 | 3 | ||
| 147 | 40 | 12.5 | ||||||||
| 151 | 50 | 10 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lv, Y.; Zheng, P.; Yuan, J.; Cao, X. A Predictive Maintenance Strategy for Multi-Component Systems Based on Components’ Remaining Useful Life Prediction. Mathematics 2023, 11, 3884. https://doi.org/10.3390/math11183884
Lv Y, Zheng P, Yuan J, Cao X. A Predictive Maintenance Strategy for Multi-Component Systems Based on Components’ Remaining Useful Life Prediction. Mathematics. 2023; 11(18):3884. https://doi.org/10.3390/math11183884
Chicago/Turabian StyleLv, Yaqiong, Pan Zheng, Jiabei Yuan, and Xiaohua Cao. 2023. "A Predictive Maintenance Strategy for Multi-Component Systems Based on Components’ Remaining Useful Life Prediction" Mathematics 11, no. 18: 3884. https://doi.org/10.3390/math11183884
APA StyleLv, Y., Zheng, P., Yuan, J., & Cao, X. (2023). A Predictive Maintenance Strategy for Multi-Component Systems Based on Components’ Remaining Useful Life Prediction. Mathematics, 11(18), 3884. https://doi.org/10.3390/math11183884