4.1. Quasi-Static Thermoelastic Problems
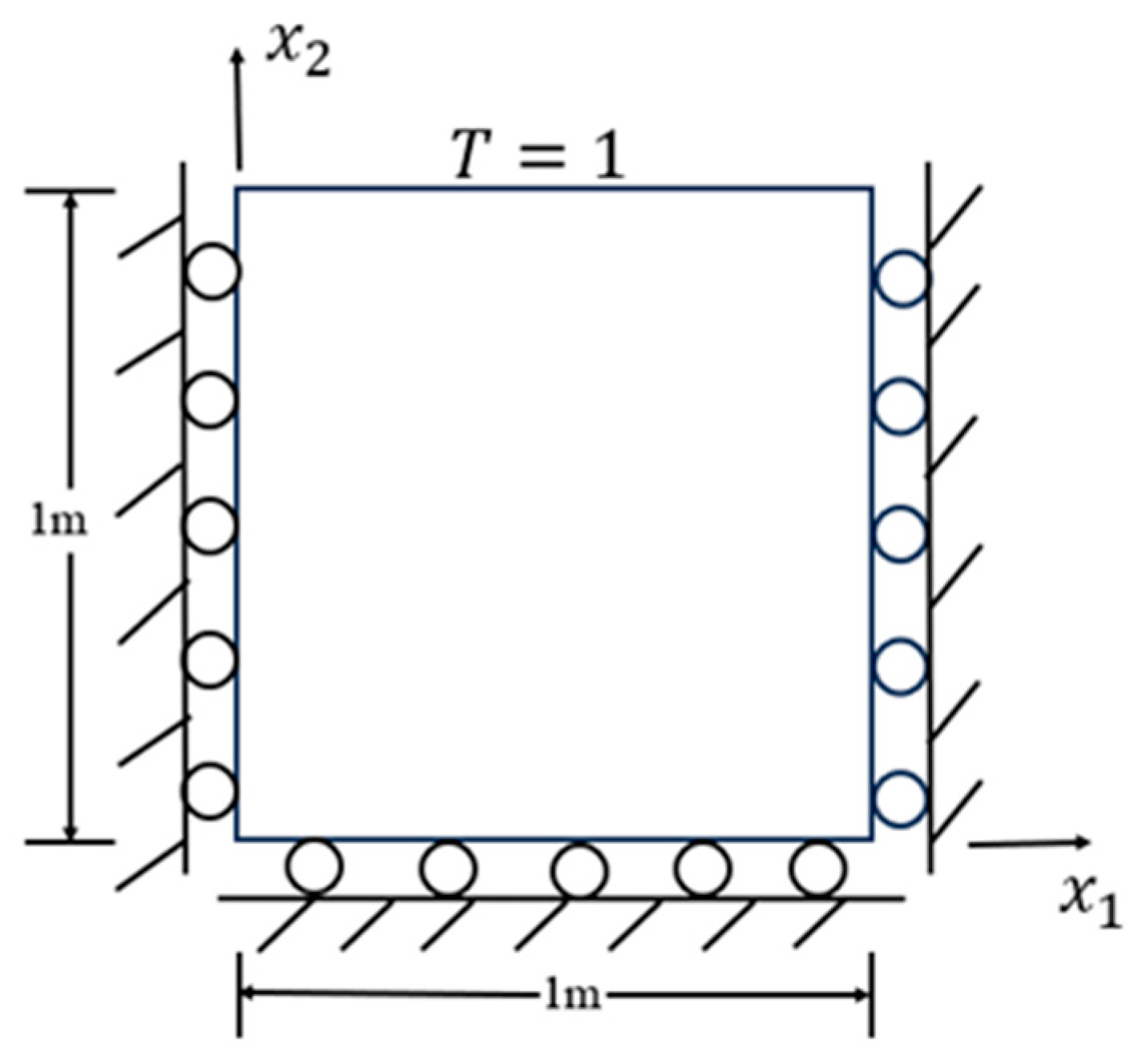
Consider a rectangular square plate under plane strain, as shown in
Figure 1, where the top edge is subjected to a sudden thermal load, the other three edges are adiabatic, the left and right edges are constrained by displacement in the
direction, and the bottom edge is constrained by displacement in the
direction. The material parameters are: elastic modulus
, Poisson’s ratio
, thermal conductivity
, density
, specific heat capacity
, and thermal expansion coefficient
. The distance from the field point to the source point is
R = 0.045. The initial temperature, initial displacement, and velocity of the square plate are zero.
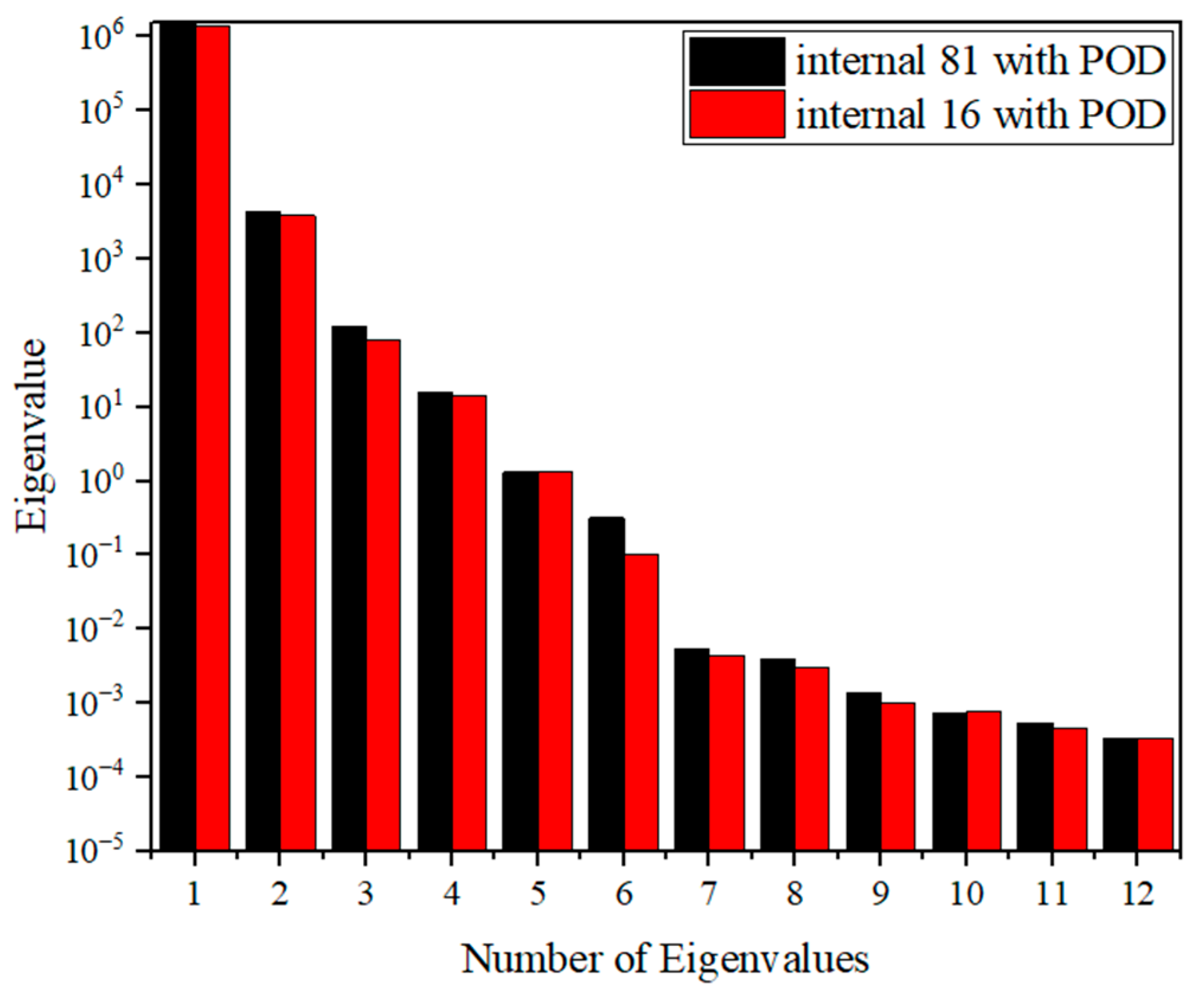
When the inertial and coupling terms are not considered, this problem is a quasi-static thermoelastic mechanics problem. In order to check the effect of the number of internal nodes on the results, the problem solution domain is discretized into 40 linear cells with 81 and 16 nodes arranged internally as shown in
Figure 2a,b, and the time step is taken to be
s. The results of the displacement and temperature fields obtained from the first 1.2 s are calculated using the RIBEM as a database for numerical simulation and from the displacement and temperature fields obtained from the first 1.2 s. The field variables at the moments of
t = 0.1 s, 0.2 s, 0.3 s, … 1.2 s (total 12) are selected as the 12 snapshot vectors, which constitute the snapshot matrix
. The effect of adopting boundary element models with different numbers of internal nodes on the calculation results is compared and analyzed. The eigenvalues of the correlation matrix are listed as shown in
Figure 3. The eigenvalues corresponding to the first five POD modes and their share of the system energy are given in
Table 1. When
is satisfied, at this point
K can be taken as 4 to establish a quasi-static reduced-order model of the rectangular square plate for both boundary element models, with internal node numbers 81 and 16, respectively.
K can all be taken as 4 to establish a quasi-static ROM for a rectangular square plate.
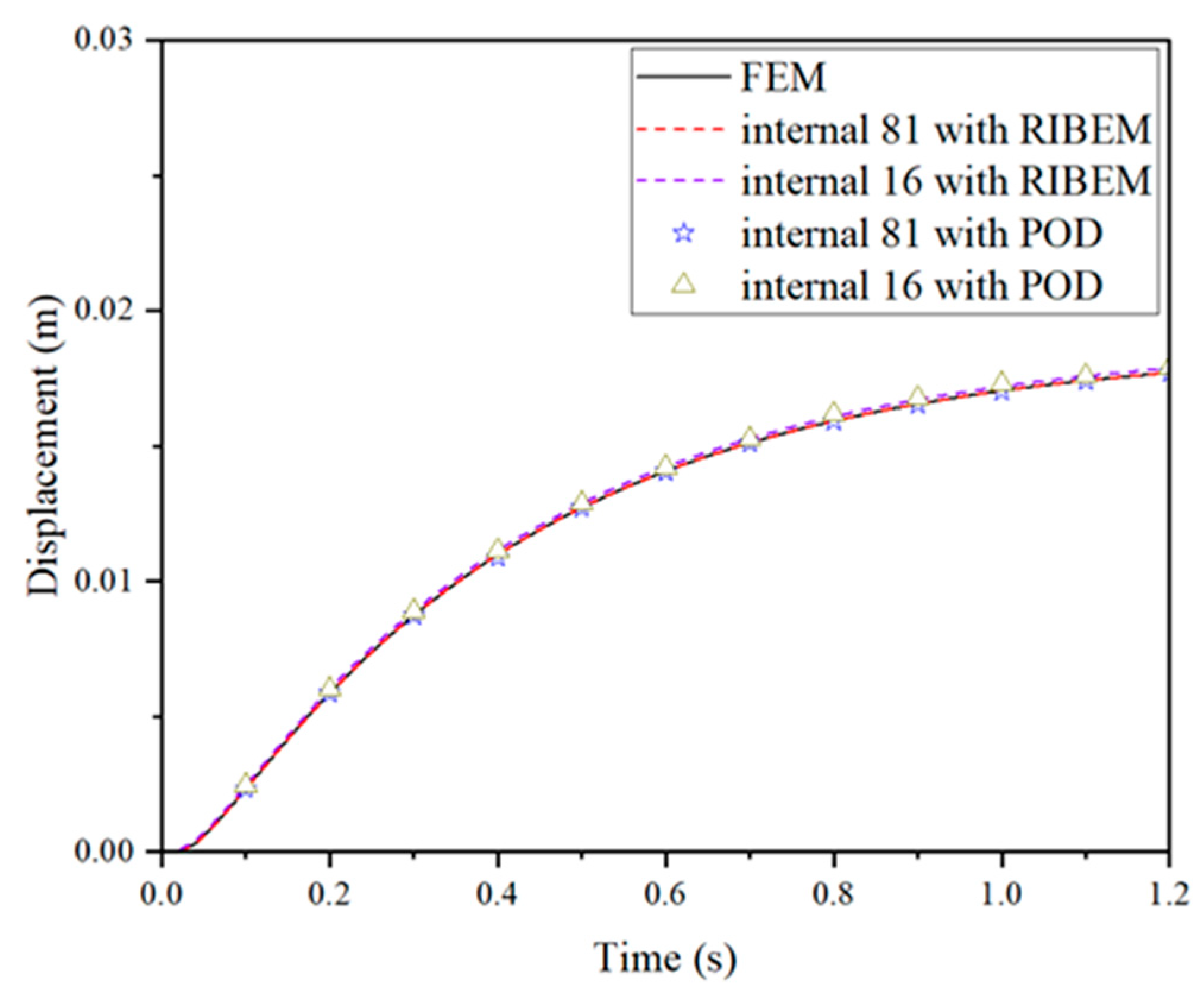
The results of temperature, displacement, and stress at point A (0, 0.5) obtained by the reduced-order model are shown in
Figure 4,
Figure 5 and
Figure 6. They are compared with the RIBEM results and the finite element results obtained with the simulation software COMSOL Multiphysics 6.1 to verify the accuracy of the reduced-order model solution. Obviously, the solution of the reduced-order model and the solution of the RIBEM are very consistent with the comparison with the finite element results, so the number of internal nodes can be appropriately reduced under the premise of guaranteeing the accuracy of the solution, which in turn speeds up the large amount of time spent on the preparation of the transient matrix in the preliminary stage. As shown in
Table 2, the degree of freedom is reduced from 363 to 4 when the internal nodes are taken as 81, and the solution degree of freedom is reduced from 168 to 4 when the internal nodes are taken as 16, which is a significant reduction in the solution degree of freedom. Moreover, compared with FOM, the reduced-order model effectively improves the computational efficiency.
4.2. Unilateral Fixed Plate under Time-Varying Loads
Consider a thermoelastic dynamics problem with fully coupled thermomechanical loads in a plane-strain state such as the square plate shown in
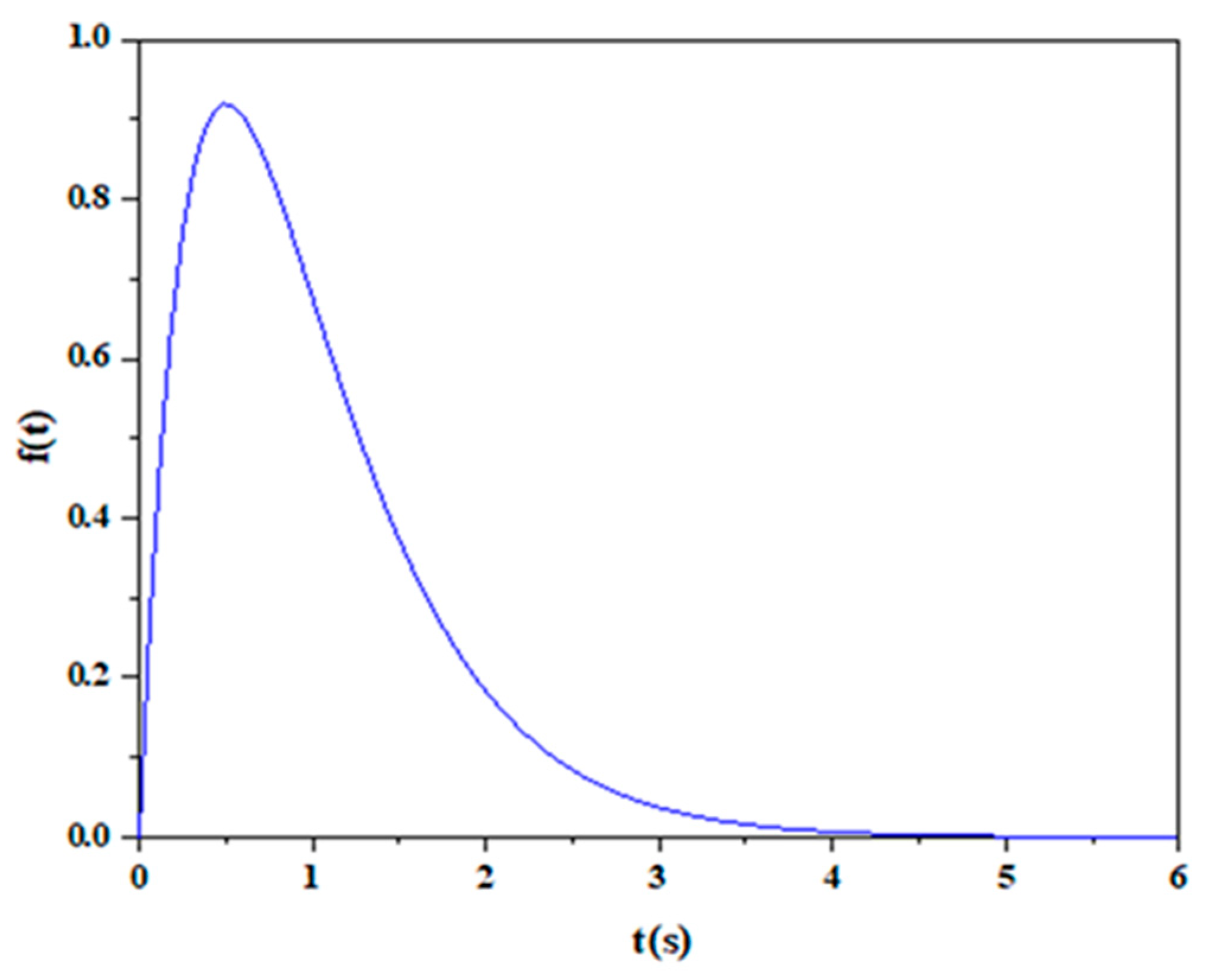
Figure 7a, with a side length of 10 × 10 m, the right end fixed and adiabatic, the top and bottom sides free and adiabatic, and a uniformly distributed thermal load or mechanical pressure load
applied to the left as shown in
Figure 8. The square plate is initially stationary and the initial temperature is zero. The material parameters are: elastic modulus
, Poisson’s ratio
, thermal conductivity
, density
, specific heat capacity
, and thermal expansion coefficient
. The calculation model is shown in
Figure 7. The computational model of the square plate is shown in
Figure 7b, where the boundary is discretized into 80 linear cells with an internal arrangement of 361 nodes, and the time step is taken as
s. Furthermore, utilizing the commercial software COMSOL, the finite element mesh distribution is as shown in
Figure 9.
In this example, the thermal coupling step-down analysis is carried out by introducing the coupling coefficient
[
49] as a measure of the level of thermoelastic coupling, and the thermal coupling step-down analysis is carried out for the case of the square plate coupled and uncoupled under thermal, mechanical, and combined thermomechanical loads, respectively. The coupling case is not considered when
. The corresponding coupling coefficient in this example is
.
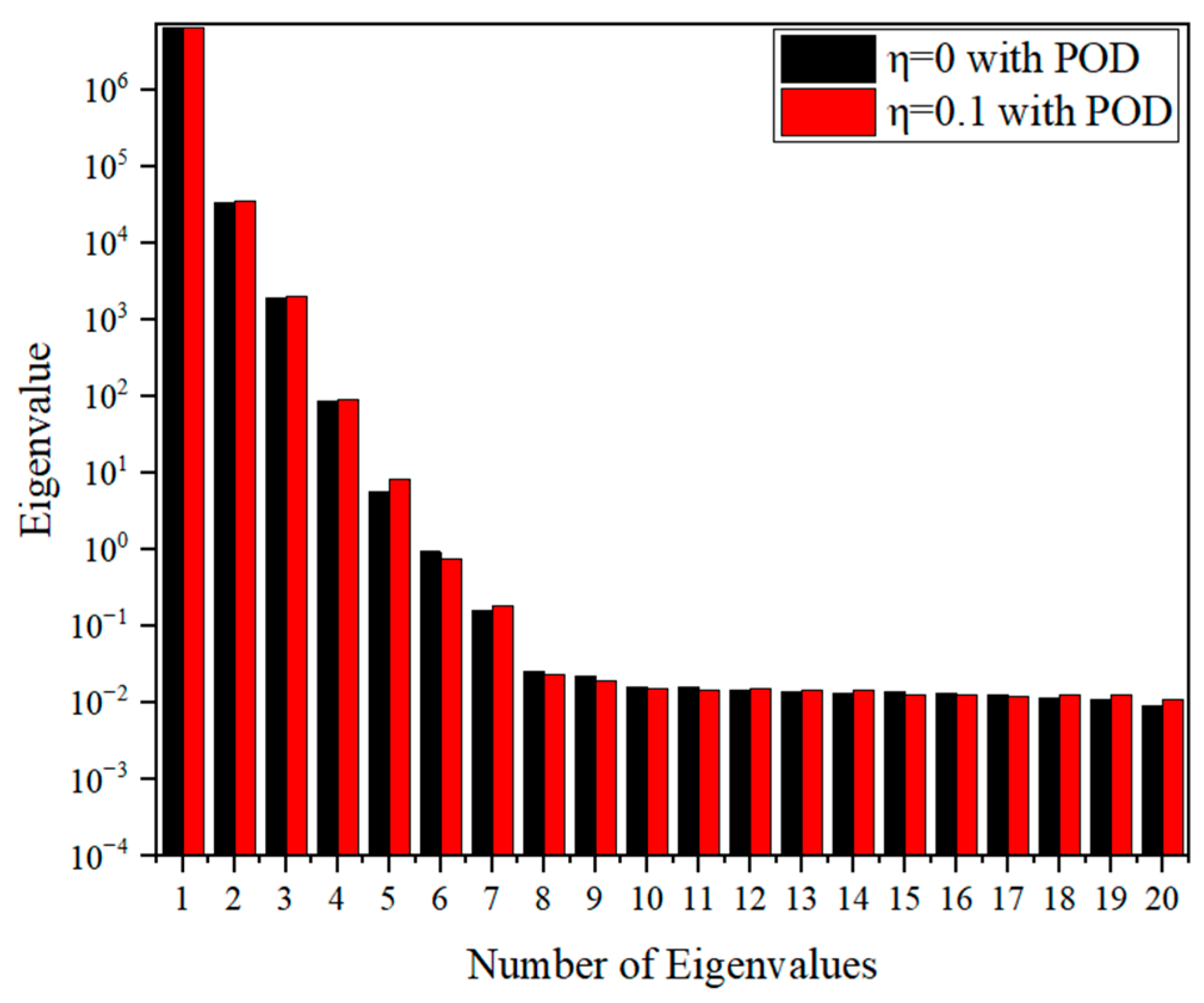
(1) Thermal shock loading alone: In this algorithm, the temperature on the left side of the square plate is shown in
Figure 8 as a function of time, and the surface force on that side is zero. Snapshots are extracted at 0.3 s intervals, and the snapshots are subsequently subjected to an intrinsic orthogonal decomposition. The eigenvalue distributions for the coupled and uncoupled cases are presented separately, as shown in
Figure 10.
Table 3 shows the eigenvalues corresponding to the first five orders of the POD modes and their share of the system energy, and it is easy to see that the eigenvalues of the coupled and uncoupled cases are not much different. Therefore, when
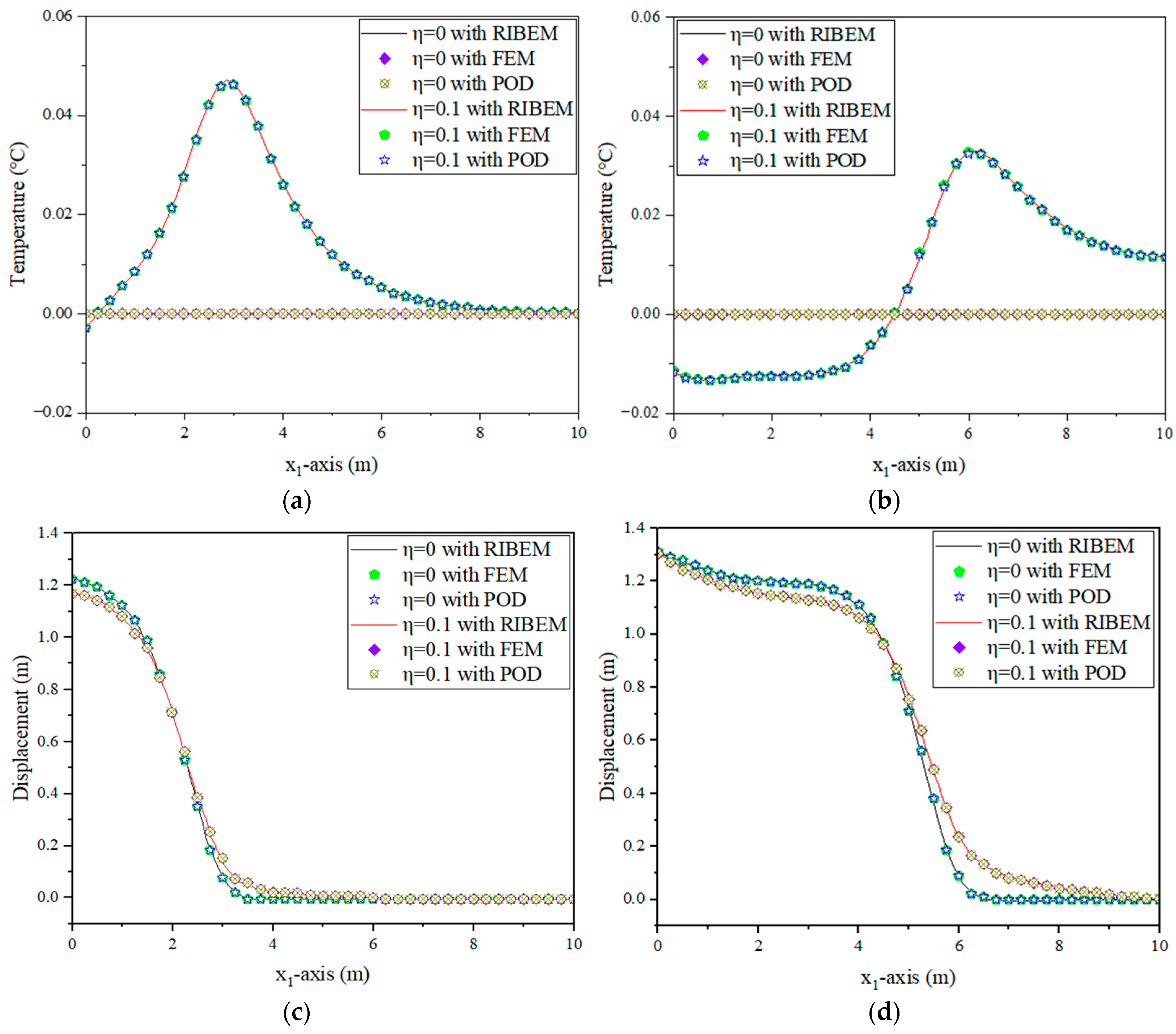
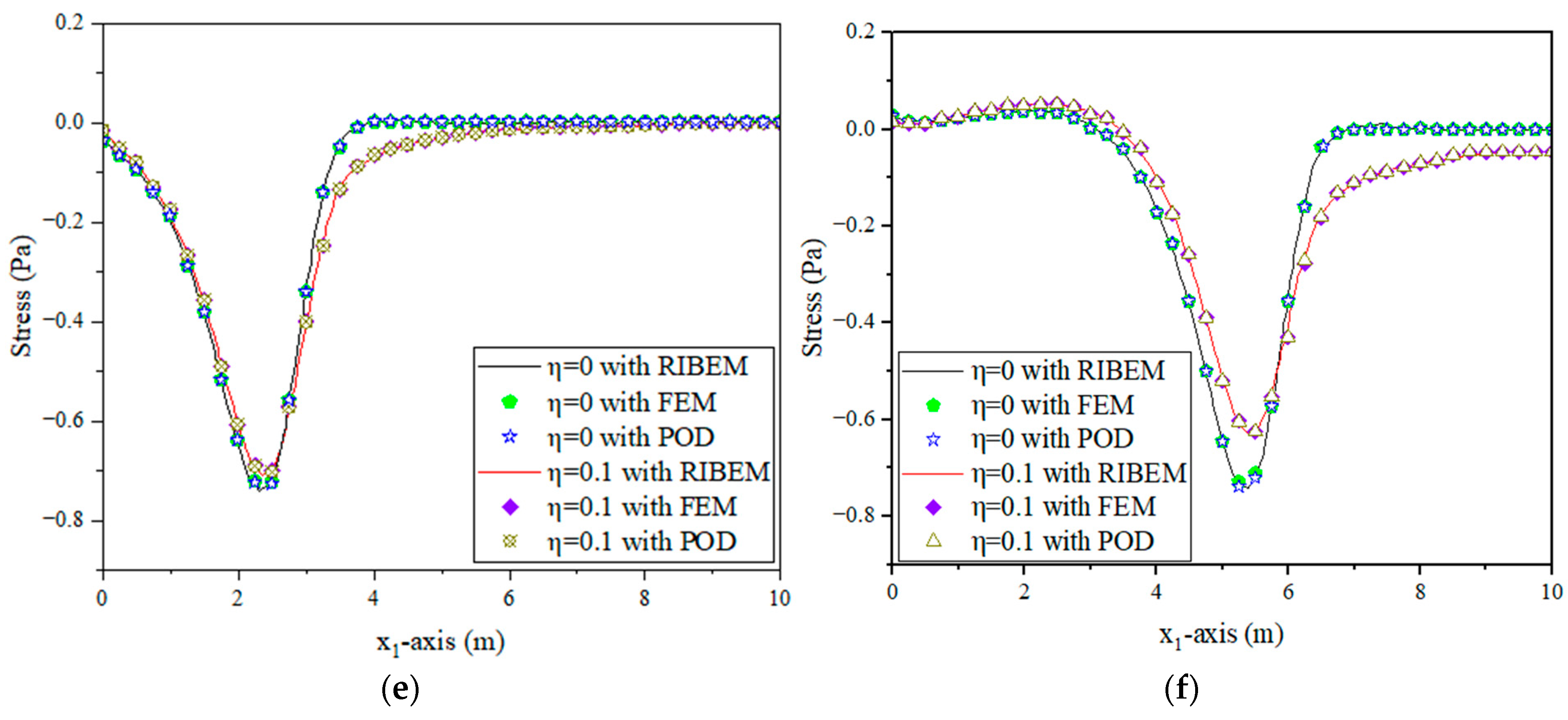
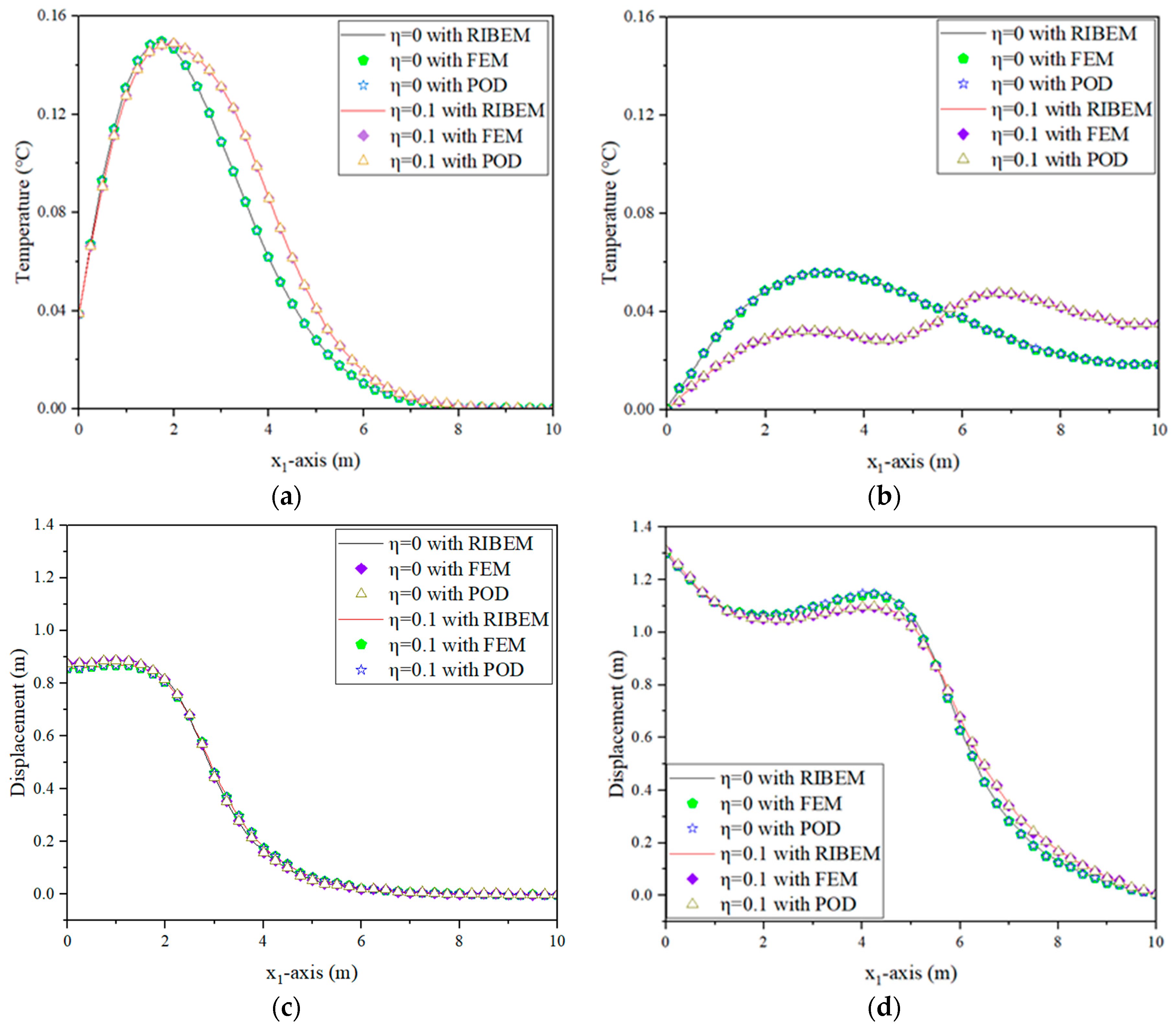
, the POD optimal base of 4 is chosen for the analysis. Numerical results of the distribution of temperature, displacement, and axial stress along the
axis at time
t = 3 s and
t = 6 s are given in
Figure 11a–f. The results show that there is good agreement between the down-order model and the full-order model comparison under thermal shock loading. As shown in
Table 4, the establishment of the descending-order model effectively reduces the computational degrees of freedom of the RIBEM for solving the coupled thermoelastic problem under thermal shock loading and saves computational time.
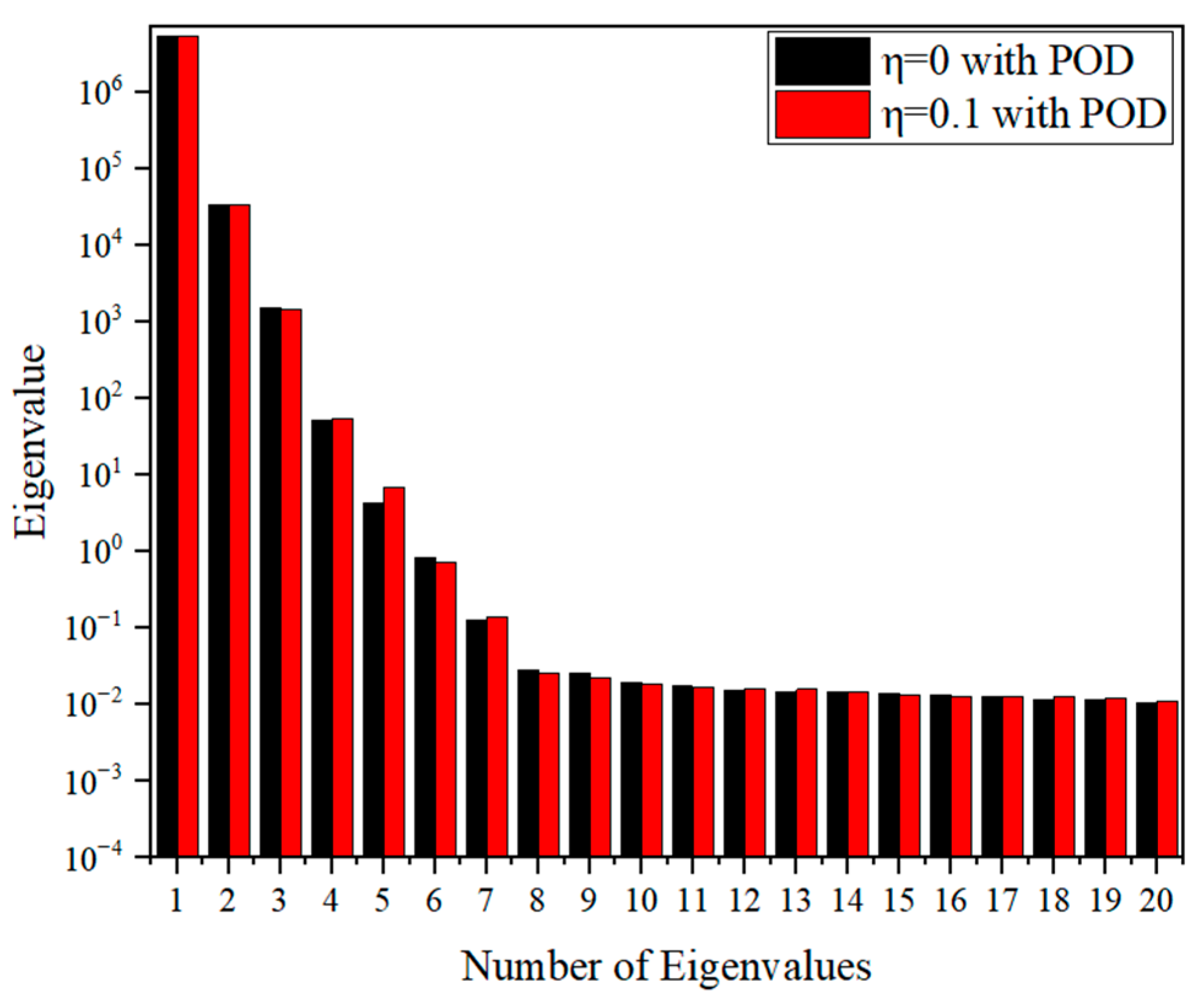
(2) Mechanical impact load alone: With other boundary conditions being the same, a mechanical impact load as shown in
Figure 8 is applied to the left side of the square plate and adiabatic heat is applied on that side. Snapshots are extracted at 0.3 s intervals, as shown in
Figure 12, which shows the distribution of eigenvalues under mechanical shock loading.
Table 5 shows the eigenvalues corresponding to the first five orders of the POD modes and their share of the system energy, and it is easy to see that there is not much difference between the eigenvalues of the coupled and uncoupled cases. Therefore, when
,
K = 4 is chosen for the reduced-order analysis. The numerical results of the distributions of temperature, displacement, and axial stress along the
axis when subjected to mechanical shock loading only for 3 s and 6 s are given in
Figure 13a–f. Due to the effect of the coupling term, the values of the displacements and the stresses are smaller in the case where the coupling case is considered than in the case where the coupling is not considered. The results show that there is good agreement between the reduced-order model and the RIBEM and finite element results comparison. Similarly, the comparison of the computational efficiency between the full-order model and the reduced-order model is shown in
Table 6, where the reduced-order modeling effectively saves computational time.
(3) Thermal and pressure shock in combination: In this case, both temperature loads and mechanical shock loads are applied to the left side of the square plate, as shown in
Figure 8. The distributions of the eigenvalues under 20 combinations of thermomechanical shock loads are shown in
Figure 14.
Table 7 shows the eigenvalues corresponding to the first five orders of POD modes and their share of the system energy. Therefore, when
,
K is taken as 4 for the reduced-order analysis.
Figure 15a–f shows the numerical results for temperature, displacement, and stress, respectively.
Table 8 shows the comparison of the computation time between the full-order model and the reduced-order model. The results show that the reduced-order model maintains a high computational accuracy while the computational efficiency is greatly improved.
4.3. FGM Thick Plate
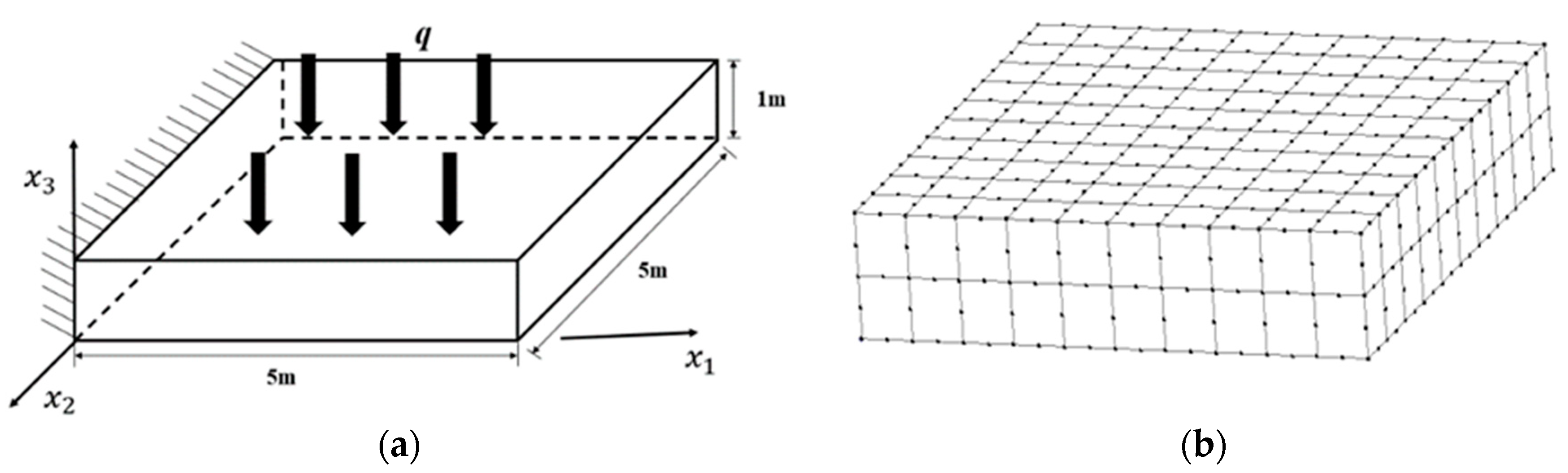
Consider a three-dimensional thick plate, shown in
Figure 16a, where the upper surface of the plate is subjected to a uniformly distributed heat flow shock load
, with the left side being fixed and the other sides assumed to be adiabatic. The geometrical dimensions of the plate are 5 × 5 × 1 m. The material parameters are: elastic modulus
, Poisson’s ratio
, thermal conductivity
, density
, specific heat capacity
, and thermal expansion coefficient
.
Figure 16b shows the computational model of the boundary element method for a 3D thick plate, where the boundary is discretized into 280 quadratic units with 842 boundary nodes and 361 nodes arranged internally, and the time step is taken as
. The boundary is discretized into 280 quadratic units with 842 boundary nodes and 361 nodes arranged internally.
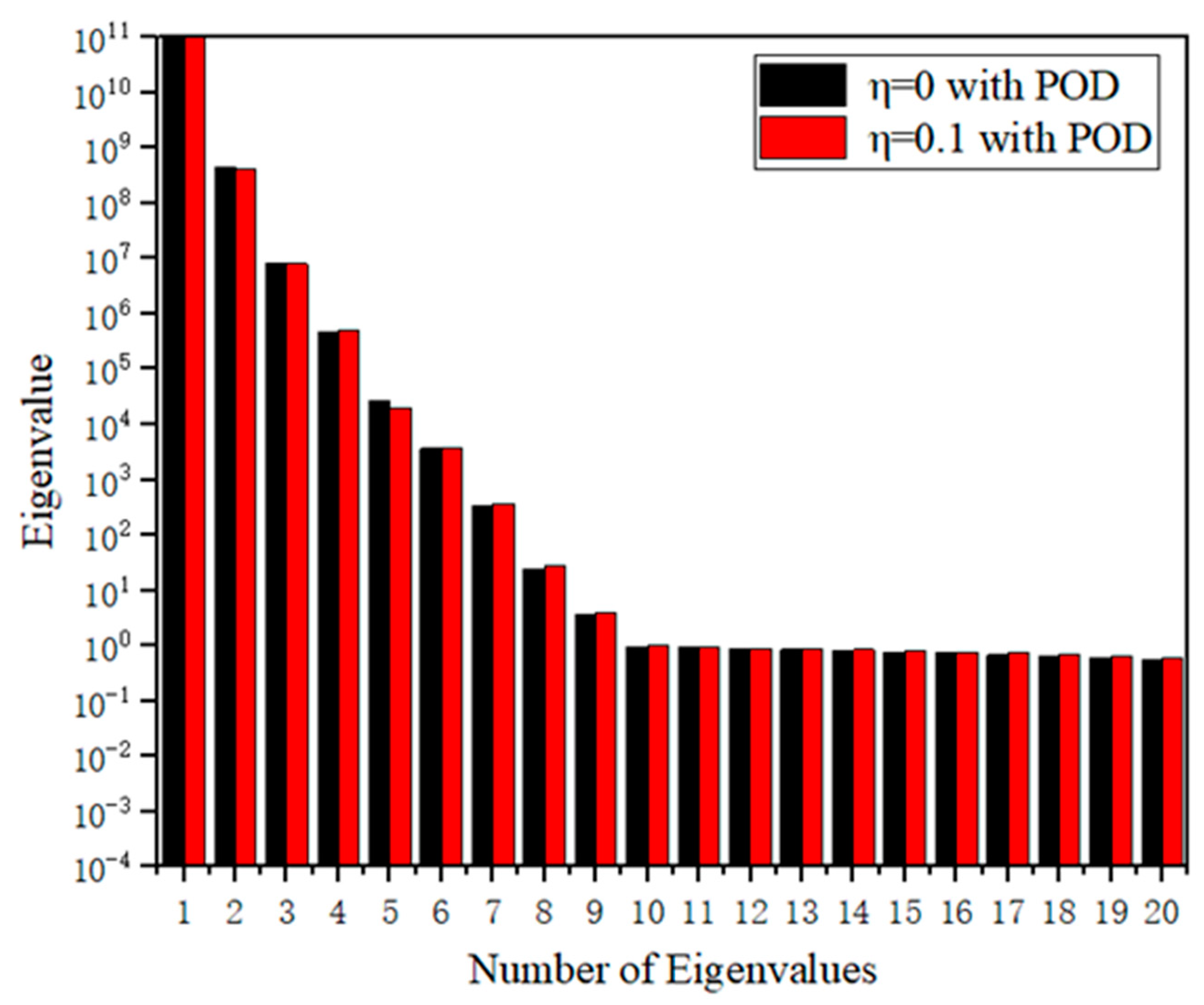
Assuming that the temperature of the thick plate at the initial moment is 0, its corresponding coupling parameter is about
η = 0.1. After solving the 3D heat flow impact loading problem described above, the temperature and displacement field data are extracted at intervals of 0.002 s. The temperature and displacement field data are extracted at the same time. As shown in
Figure 17 and
Table 9, as with the 1D and 2D simplified models, the higher order eigenvalues in the 3D model account for the largest energy. The eigenvalues corresponding to the first six POD modes and their share of the system energy are shown in
Table 9. Therefore, when
,
K = 4 is chosen for the reduced-order analysis.
Figure 18a shows the temperature at point M (5, 0, 0.5) as a function of time, and
Figure 18b gives the results of the numerical analysis of the vertical displacement at point M. From
Figure 18a,b, it is obvious that the 3D step-down model is still in good agreement with the FOM. On the other hand, as shown in
Table 10, the introduction of the reduced-order model significantly reduces the degrees of freedom and improves the computational efficiency by more than 100 times. However, the acquisition of the snapshot matrix is time-consuming, so the research on POD still has great potential.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}