1. Introduction
Leprosy (also known as Hensen’s disease) is an age-old disease and is described in the literature of ancient civilizations. It is a chronic infectious disease caused by a type of bacteria called
Mycobacterium leprae (
M. leprae), which primarily affects the peripheral nerves, skin, and eyes, and finally leads to loss of ability to sense and touch accompanied by dry, flaky, reddish skin due to inflammation. In very advanced cases, apparent loss of various human organs, such as toes and fingers, and permanent blindness are observed [
1]. The treatment of leprosy has certainly been advanced by the introduction of multidrug therapy (MDT) in 1981, following the recommendation of the World Health Organization (WHO) [
2,
3]. The number of new leprosy cases detected annually has remained quite stable over the last 15 years [
4]. According to the WHO report of 2022, about 1500 people in the United States and 250,000 people around the world, especially India, Indonesia, and Brazil, are affected by this disease every year. This situation clearly indicates that, far from being eliminated as a public health problem, leprosy still causes considerable long-term morbidity in both the developing and developed worlds. After reviewing the various issues related to classification, treatment regimes, drug resistance, and existing elimination strategies, it has been observed that new anti-leprosy agents and treatment designs are required in the near future [
5]. In order to investigate the pathogenesis of leprosy from a completely novel analytical and numerical point of view, considering only systems involving ordinary differential equations (ODE) with integer-order (IO) derivatives is not sufficient, and introducing fractionalized mathematical systems to introspect various aspects of memory’s effect on leprosy dynamics becomes mandatory in this scenario.
In 2016, Westerlund pointed out that all matter has a memory [
6]. The dynamic behavior of living microorganisms such as
M. leprae bacteria not only depends on the conditions of their current state but also on those of their previous states to better predict and interpret the pattern of the states at some point in the future [
7,
8]. It is to be noted that integer-order (IO) derivatives only take into account the local properties (at time
t). In the real-world explanation, the IO differentiation explores the dynamics between two different points. In such a situation, a natural question may arise about the nonlocal behavior of the two points. To solve such limitations of local differentiation, researchers like Riemann and Liouville first introduced the concept of differentiation with nonlocal or fractional-order operators [
9]. A fractional (fractional-order) derivative is a generalization of the integer-order (IO) derivative and integral. It originated first in the literature about the meaning of the
-order derivative, from L’Hospital’s to Leibnitz’s, in 1965 [
10] and is a very promising tool for describing the memory phenomenon [
11,
12,
13,
14,
15,
16]. The kernel function of a fractional derivative is called the memory function [
17,
18]. Now, the leprosy model proposed by Ghosh et al. [
19] is an IO model which in general is memory-free. Hence, this research work was unable to reflect any kind of memory effect through the model, which expresses the limitation of the system in investigating the overall impact of the drug resistance of
M. leprae bacteria on the infection and disease dissemination process of leprosy.
The memory effect can be incorporated into an ODE-based system by introducing fractional-order
derivatives as an index of memory [
20]. The significance of varying the fractional order in
is that
tends to zero, which indicates that the fractionalized system has ideal memory and that the system is free from memory as
approaches 1. Although most of the early research studies on fractional-order systems were based on the Caputo and Riemann–Liouville fractional-order derivatives, it has been proven that these methods have certain drawbacks. For instance, the kernels of these methods have singularity at the endpoint of an interval of definition [
21,
22,
23], which inevitably restricts their role and development in the modelling of different natural and human-made systems. Thus, to overcome these issues, several new definitions of fractional derivatives have been introduced in recent years [
24,
25,
26,
27,
28]. The basic difference among these derivatives is the varying structure of the kernels, which should be chosen to satisfy the requirements of various systems. The main difference between the Caputo–Fabrizio (CF) and Caputo fractional derivatives is that the CF derivative is obtained using an exponential decay law while the Caputo derivative is completely based on the power law [
23]. For these reasons, we have chosen the CF fractional derivative over the classical Caputo derivative for the construction of a fractionalized system in our research article.
Optimal control theory is yet another effective tool used in disease modelling [
29,
30]. It came into existence after the formulation of the most popular Pontryagin maximum principle [
31] and it provides further insight into the dynamics of the diseases in addition to more appropriate control and preventive strategies [
32]. Optimal control problems that involve fractional calculus are called fractional optimal control problems (FOCPs), and these are considered to be the generalized form of classic optimal control problems. There are several research papers in the literature that provide the theoretical basis and fundamentals of FOCPs, and most of these papers extensively investigate how to formulate FOCPs and derive optimal conditions for several states and control variables using analytical and numerical methods [
33,
34,
35,
36]. Nowadays, FOCPs have been applied to epidemiological and infectious- and noninfectious-disease-based cell dynamic mathematical models in order to develop faster and more accurate methods for controlling the disease. Hence, FOCPs are potentially more flexible tools for modelling epidemiological and biological systems which are closely related to memory effects.
Although there exist various types of therapy related to leprosy, none can fully cure the disease. Moreover, due to the memory function of the bacteria, new resistant
M. leprae strains have been found and drug resistance capability has been observed to be built in most of the cases [
37,
38]. In a recent study across three countries, it was found that from new cases,
were Dapsone-resistant and
were Ofloxacin-resistant, and in samples from relapsed patients,
and
were seen to be Dapsone-resistant and Ofloxacin-resistant, respectively [
39,
40,
41,
42].
The dynamics of the mathematical model of leprosy proposed by Ghosh et al. [
19] in 2021 was based on ODE systems. To achieve our goal, we have developed a three-compartmental fractional mathematical system in this research article by replacing the integer derivative with a Caputo–Fabrizio derivative of fractional order
. We have proved the existence and uniqueness of solutions of the fractional model with the help of the renowned Banach Fixed-Point theorem and investigated the stability by adopting Picard’s T-stability theory. Furthermore, we have studied the mechanisms of action and efficacy of the combined biologic therapy, introducing Dapsone and Ofloxacin by stating an optimal control problem to this fractional model. Our goal is to find the accurate optimal drug dosage regimen for the eradication of the disease. The optimal control problem for minimizing the cost of immune therapy and for the simultaneous optimization of the effect of this therapy on the infected Schwann cells and
M. leprae bacteria are analyzed. The main objective of this research article is to compare from a quantitative point of view the fractional system and the corresponding optimal-control-induced system with the help of the Caputo-Fabrizio fractional derivative for different values of the fractional order
. All of our analytical results are validated through numerical simulations using MATLAB 2016a.
3. The Basic Integer-Order Model and the Caputo–Fabrizio Fractionalized Mathematical Model Formulation
In recent years, fractional-order derivatives have gained huge importance in the field of modeling real-world biological phenomena. The fractional-order derivative is in fact a much generalized version of the integer-order derivative. In this research article, we now introduce the basic three-dimensional nonlinear ODE-based mathematical model developed in [
19] that describes the fundamental disease dynamics of leprosy.
with initial values
,
and
at
. Here,
,
and
denote the concentrations of healthy Schwann cells, infected Schwann cells and
M. leprae bacteria at any time
t.
and
describe the intrinsic growth rates of the
and
populations, where
and
are the carrying capacity of the same.
is the rate at which healthy cells are infected by
M. leprae and
denotes the natural mortality rate of
cells. The bacterial clearance rate results from the infection and the proliferation rates of newly produced free
M. leprae bacteria, which are indicated by the parameters
and
, respectively. Modifying the above system in terms of the CF (Caputo–Fabrizio) fractional differential system of equations, we obtain
with initial values
,
and
at
.
3.1. The Iterative Scheme
We now consider system (7). The term
is a nonlinear term and, hence, applying the Laplace transformation operator (
) on both sides of the system (7), we obtain that
The set in Equation (8) can now be rewritten in the following form:
Using the inverse Laplace, we obtain
We now present the series solutions generated by this method as follows:
Furthermore, the series solution representation of the only existing nonlinear term
is given as
We now use the initial conditions to achieve the following recursive formulas:
The approximate solution is assumed to be obtained as a limit when , i.e., , and .
3.2. Stability Analysis
In this section, first, we present the detailed definition of the T-stability of Picard’s iteration [
46].
Definition 5. Suppose T is a self-map on a complete metric space . Consider an iteration . Furthermore, let us assume that is the fixed-point set of T with and let converge to some point . Let and define . Now, if implies that , then the iteration method is said to be T-stable. Furthermore, note that the convergence of guarantees that must be bounded above. If all these conditions hold true for , then Picard’s iteration method is called T-stable.
Let be a Banach space. As every Banach space is a complete metric space with the metric induced by the associated norm, Definition 5 holds true for also.
Theorem 1. Let T be a self-map on the space , which satisfies the following:where and . Suppose T has a fixed point. Then, T is Picard’s T-stable. Now, let us define a self-map
T as
For all
, let us first construct the following differences:
where
is a Lagrange multiplier in fractional form. As all the solutions
,
,
are Cauchy sequences in the Banach space
, it is true that
,
and
as
. Due to this similar behavior of the solutions, i.e., comparative influence of the solutions in [
47], we have
Now, applying the norm on both sides of the first equation of (16), we obtain
Using triangle inequality, we obtain
Then, using the relations in (17), we obtain
where
,
and
are functions of
and
,
and
. Proceeding similarly, we obtain from the second and third equations of (16)
and
where
,
,
and
are functions of
and
So, we can conclude that the self-map
T defined in (15) has a fixed point. In view of (21) and also choosing
and
we can see that all the conditions of Theorem 1 are satisfied. Thus, the self-mapping
T is Picard’s T-stable. Here, it is important to note that
is a constant, not a function.
Summarizing the previous discussions, we now present the following theorem.
Theorem 2. Consider system (7) with the set of equations in system (14). Let T be a self-map as defined by (15). If the conditions (21) are satisfied by T, then T has a fixed point and, hence, T is Picard’s T-stable.
3.3. Existence of the Solutions
Using fixed-point theory, we now show the existence of the solutions of system (7) in this subsection. For this, let us first observe that
Let
be an operator on
H to itself, i.e.,
. Here,
is chosen as an operator for the entire system. Applying it, we obtain that
where
Let
be bounded. We aim to show that
is compact to ensure the existence and boundedness of the solutions of system (7), where
is defined as in (22). We can see that there exist positive reals
,
and
such that
,
and
. From the first equation of (22), we can write
which implies
and also proceeding similarly, we can obtain
where
Hence, we have proved that
is bounded. Let,
and
. So, for a given
, there exists
satisfying that
, and we can write the following:
Assuming that if the function
is Lipschitz-continuous, i.e., for some real number
and for all
, the inequality
holds, we can rewrite (23) as
where
. Similarly, we have
if
and
are also Lipschitz-continuous, i.e., for some real numbers
, the conditions
Finally, choosing
we can see that
holds.
Similarly proceeding and using inequalities (25) and (26), we can also easily show that and hold, which guarantees the equicontinuity of . Hence, according to the well-known Arzela–Ascoli theorem, we can say that is compact. Next, we present the following theorem by summarising the previous discussions on the existence of the solutions of system (7), and then we move forward to show the uniqueness of the solutions of system (7).
Theorem 3. Let be bounded and be defined as in (22). Then, there exist , and such that if the functions , and are Lipschitz-continuous, i.e., if for some real numbers, , and , the following conditions holdfor all then is compact. Thus, all the solutions of system (7) exist and are bounded. 3.4. Uniqueness of the Solutions
To prove the uniqueness of the solutions of system (7), let us consider the mapping
again which was defined previously. Now,
Similarly, we can obtain
where
. Hence, the operator
is a contraction if the following conditions hold:
which ensures the existence of unique positive solutions of system (7) using fixed-point theorem.
4. Equilibria and Stability
Our CF fractionalized mathematical model (7) has two equilibria, namely the disease-free equilibrium
and the endemic equilibrium
. Here,
is given as
. The value of the basic reproduction number
is given as
[
19].
is actually interpreted as the secondary number of new infections in a completely susceptible healthy Schwann cell population and, based on the above, we now present the following theorem on the stability of
for our system (7) as follows:
Theorem 4. The disease-free equilibrium of system (7) is locally asymptotically stable if .
To obtain the coordinates of the endemic equilibrium
, we now set the right-hand sides of system (7) to zero. Hence, we obtain the values of
, which are already described in the article by Ghosh et al. [
19]. In this context, we now present the following theorem, which describes the required criterion about the stability of
[
48].
Theorem 5. If the matrix is invertible, then the endemic equilibrium of the CF fractionalized system (7) is locally asymptotically stable if all the roots of the characteristic equation of system (7) evaluated at are negative real or have negative real parts where denotes the Jacobian matrix of system (7) at .
5. Optimal-Control-Induced Caputo–Fabrizio Fractional Mathematical Model
Optimal control is a very useful tool for controlling the progression of a disease in the human body. Furthermore, this tool has gained major importance lately for the investigation of efficient and cost-effective drug treatment policies for various infectious diseases and for other different important biological problems based on fractional mathematical models [
36,
43,
49,
50]. In our research article, we have analyzed our formulated CF fractionalized model (7) by incorporating two control functions,
and
; one is an effect of the drug Ofloxacin and another is of Dapsone on various cell densities, respectively. Here, Ofloxacin blocks the occurrence of new infections, and by preventing the formation of folic acid, Dapsone specifically inhibits replication of
M. leprae bacteria. The optimal-control-induced CF fractional mathematical model is presented as
with initial values
,
and
at
.
Our main aim is to decrease the number of infected cells and the bacterial density as well as to increase the healthy cell concentrations. Let us now consider the state system given by (27) with the class of admissible controls defined as
So, the objective function for the CF fractionalized optimal control system (27), (28) is given as
where
and
measure the cost associated with the control functions
and
, respectively. Then, we find the optimal controls
and
to minimize the cost function
subject to the constraints
,
and
, where
and
, and the given initial conditions are
and
,
.
Now, we first present a formulation of a generalized fractional optimal control problem (FOCP) and deduce the necessary conditions for its optimality. For this, let us consider a generalized FOCP as
subject to the constraints
with initial condition
. Here,
and
are state and control vectors, respectively, and
L and
g are differentiable functions with
.
Theorem 6. We define a Hamiltonian as follows:where is a function. If satisfy the following equations: then is the minimizer of (31).
Proof. Let us first substitute Equation (32) in (31); hence, we obtain
The necessary condition for the optimality of the FOCP is
To obtain the optimal control laws, we choose the variation of equation (33) as
where
,
,
are variations of
x,
v and
, respectively.
Substituting (36) in (35), we obtain
Now, we know
. Hence, considering Equation (37), the coefficients of
,
,
must be equal to zero, which leads us to the following equations:
□
In addition, the following necessary conditions must also hold for the optimality of the FOCP defined in (31), which are noted here in the form of the following lemma.
Lemma 1. The following conditions hold true for the generalized FOCP described in (31):where . Proof. The definition of the CF fractional derivative (2) is given as
From the above-mentioned definition of the CF fractional derivative, it follows that
Now, assuming
, from Equation (40), we obtain that
Hence, the optimality conditions are achieved as
□
We now shift our focus from the generalized point of view, specifically to our CF fractionalized optimal-control-induced (CFOC) system (27), (29), (30). Let us first consider the following modified cost function:
Hence, the Hamiltonian is defined as
Then, utilizing (42), the necessary and sufficient conditions for the CF fractional optimal control (CFOC) problem defined in (27), (29), (30) are given as
Moreover, , and are Lagrange’s multipliers, which express the necessary and sufficient conditions in terms of the Hamiltonian for the fractional optimal control problem defined above.
Now, consider system (27). Let us consider the Hamiltonian defined in (44). Rewriting it in the following form, we obtain
Theorem 7. If , are optimal controls of the given CFOC system defined by (27), (29), (30), and if , , are the corresponding optimal paths, then there exist co-state variables , , such that besides the given control system being satisfied, the following conditions, i.e., the co-state equations, hold true also. The co-state equations are given aswith transversality conditions , , , and the optimality conditions are given by Proof. The adjoint system (46) is obtained from
as follows
with transversality conditions given as
. Furthermore, the characterization of the CF fractionalized optimal controls
and
are achieved by solving the following equations
on the interior of the control set and utilizing the properties of the control space
. □
The analytical sections of our study come to an end here and next we proceed to the numerical outcomes for validation of the analytical portions of our proposed systems.
6. Numerical Simulation
In this section, we perform numerical simulations for both the Caputo–Fabrizo fractional system denoted by (7) and also the CF fractionalized optimal control system (27). All the numerical results are compared with the analytical and theoretical outcomes previously achieved. We chose the initial values according to the cardinal rule of scientific hypothesis. Some values of the parameters were chosen from the research articles [
19,
51,
52], and the other values were estimated. The values of the parameters which we have used here are described in the following table denoted by
Table 1. All of our numerical findings here were obtained using MATLAB 2016a. Throughout the study, the interval of consideration was chosen as
.
Here, we want to mention that
Table 1 actually refers to the values of the system parameters for system (7) and system (27) for the fractional order
. During the simulations of the figures for
, we adopted the technique proposed by Atangana et al. [
53]. To avoid the dimension mismatching of
and
between the left- and right-hand sides of the systems, the dimensions of the system parameters were modified accordingly and the corresponding values were utilized for the numerical simulations.
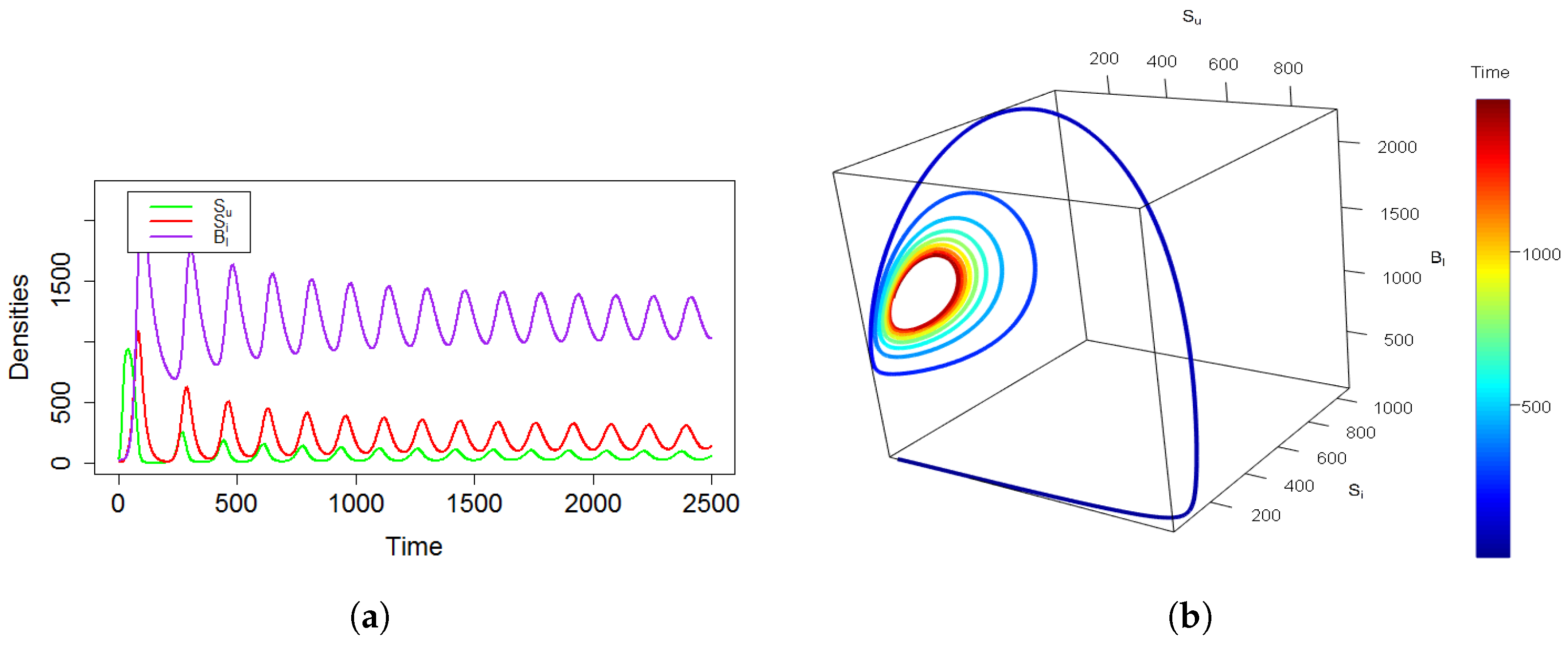
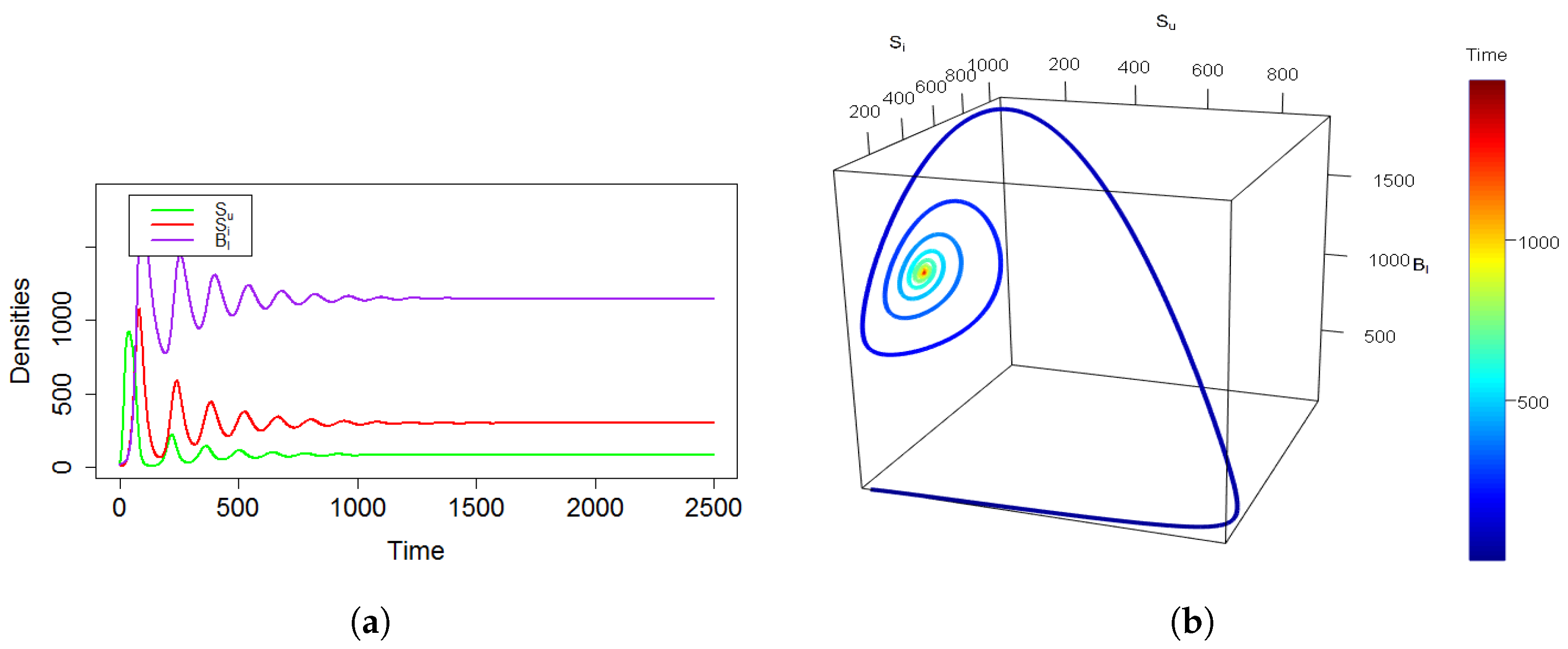
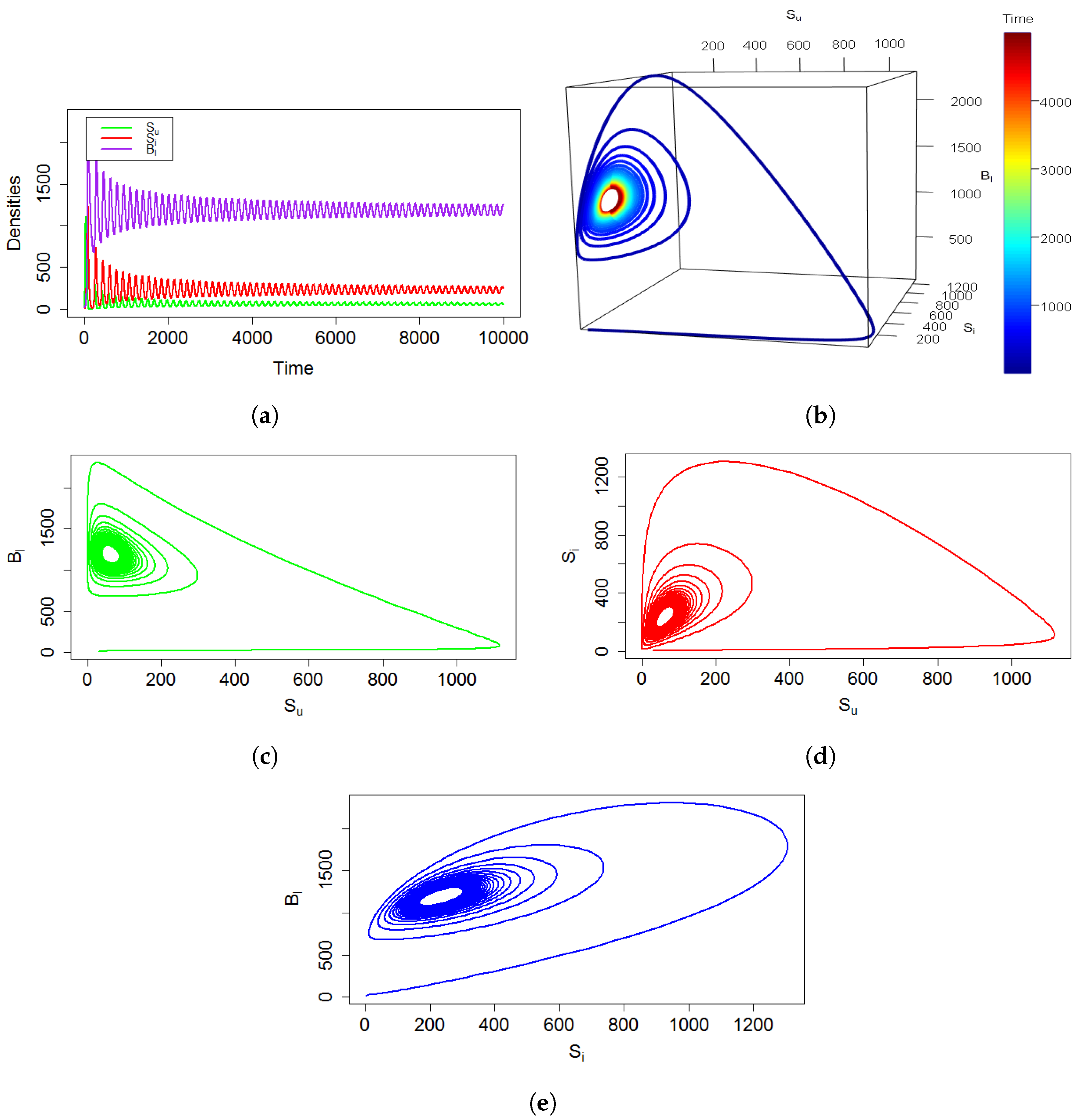
In
Figure 1 and
Figure 2, the behavior of the cell densities and the phase portrait diagrams of the healthy Schwann cells, infected Schwann cells and
M. leprae bacteria for system (7) in the 3-D phase space are exhibited, respectively, for
, i.e., for the classical integer-order system.
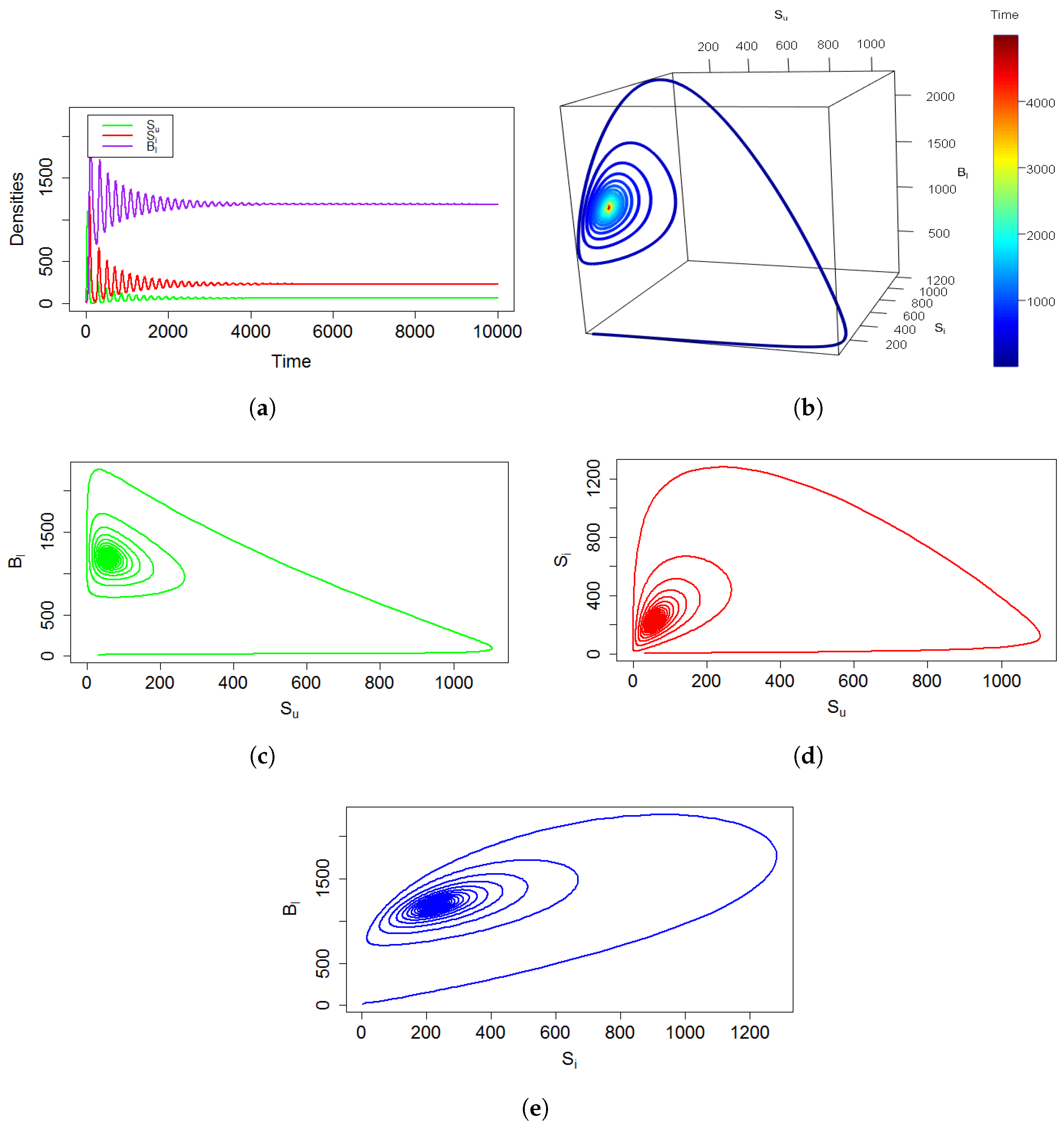
Figure 1 depicts oscillatory periodic solutions and stable limit cycles. On the contrary, in
Figure 2, stable solutions are observed whenever the value of
is increased from
to
, which describes that the intrinsic growth rate of the bacterial population is a very crucial parameter for demonstrating the dynamical shift in system (7).
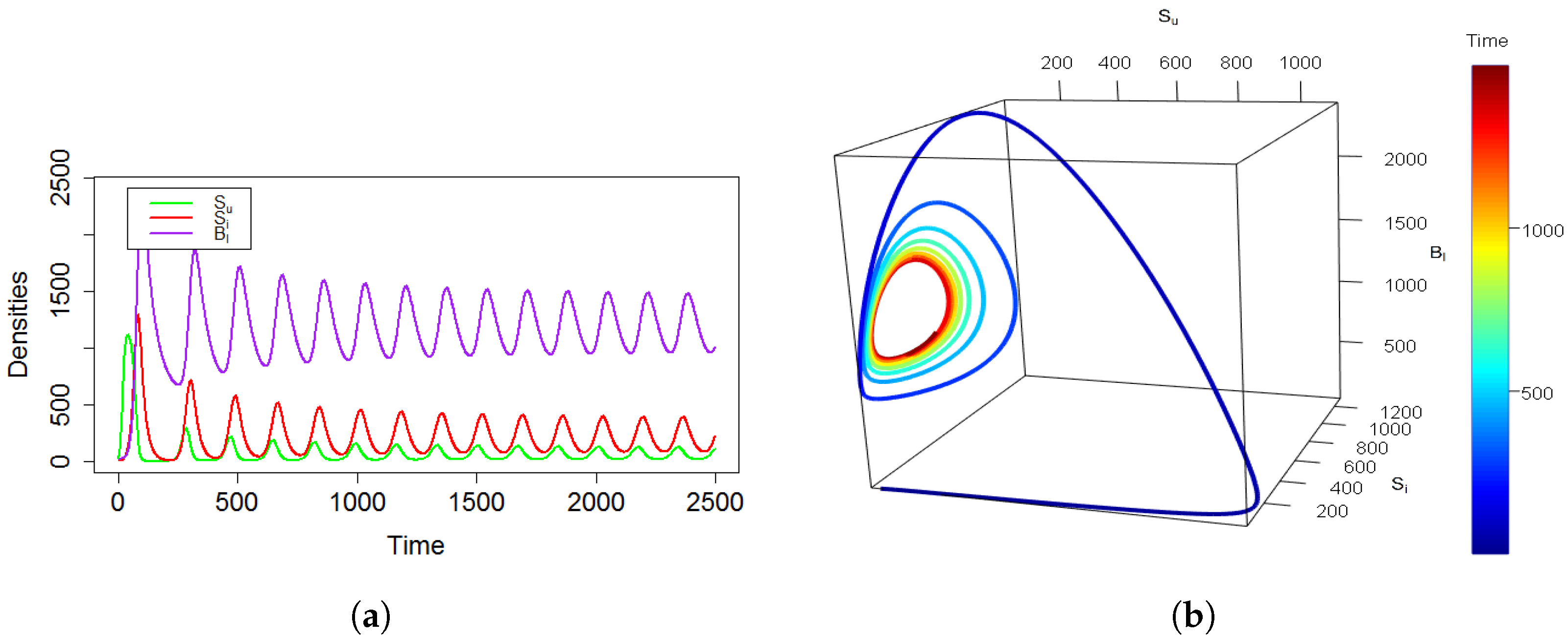
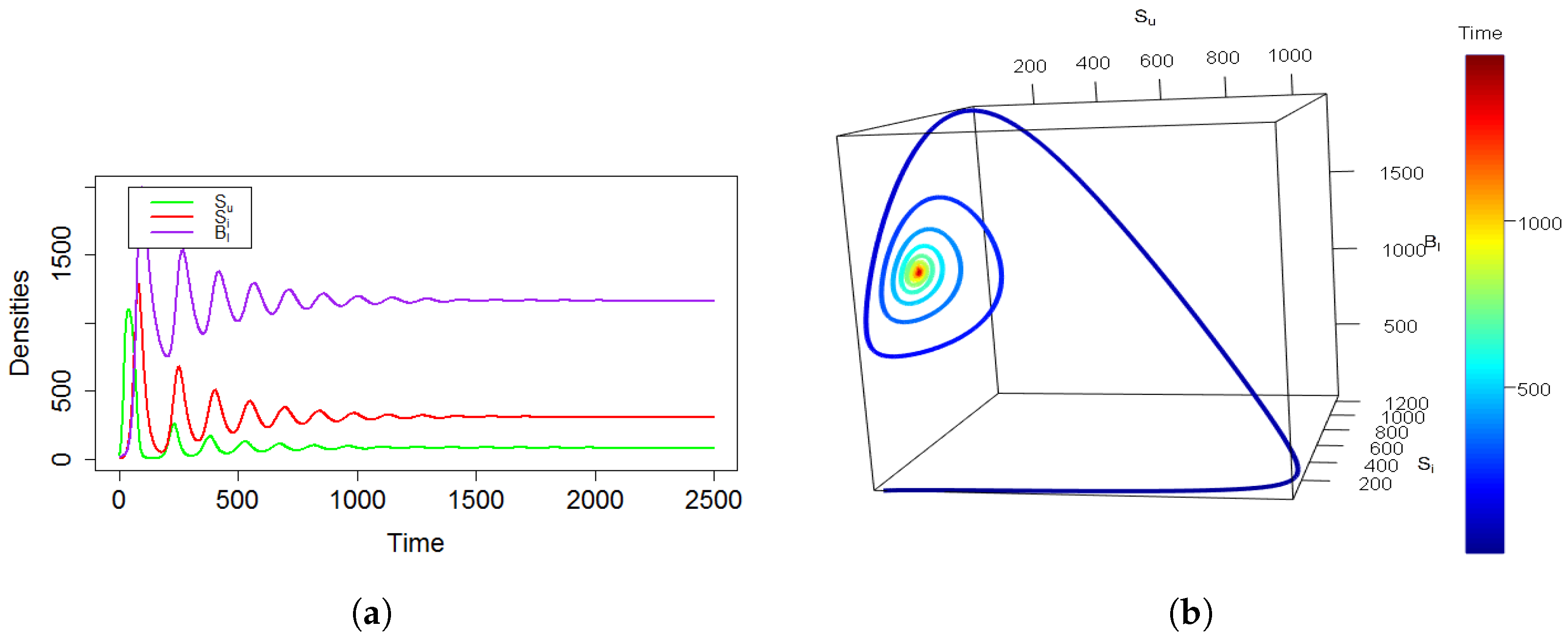
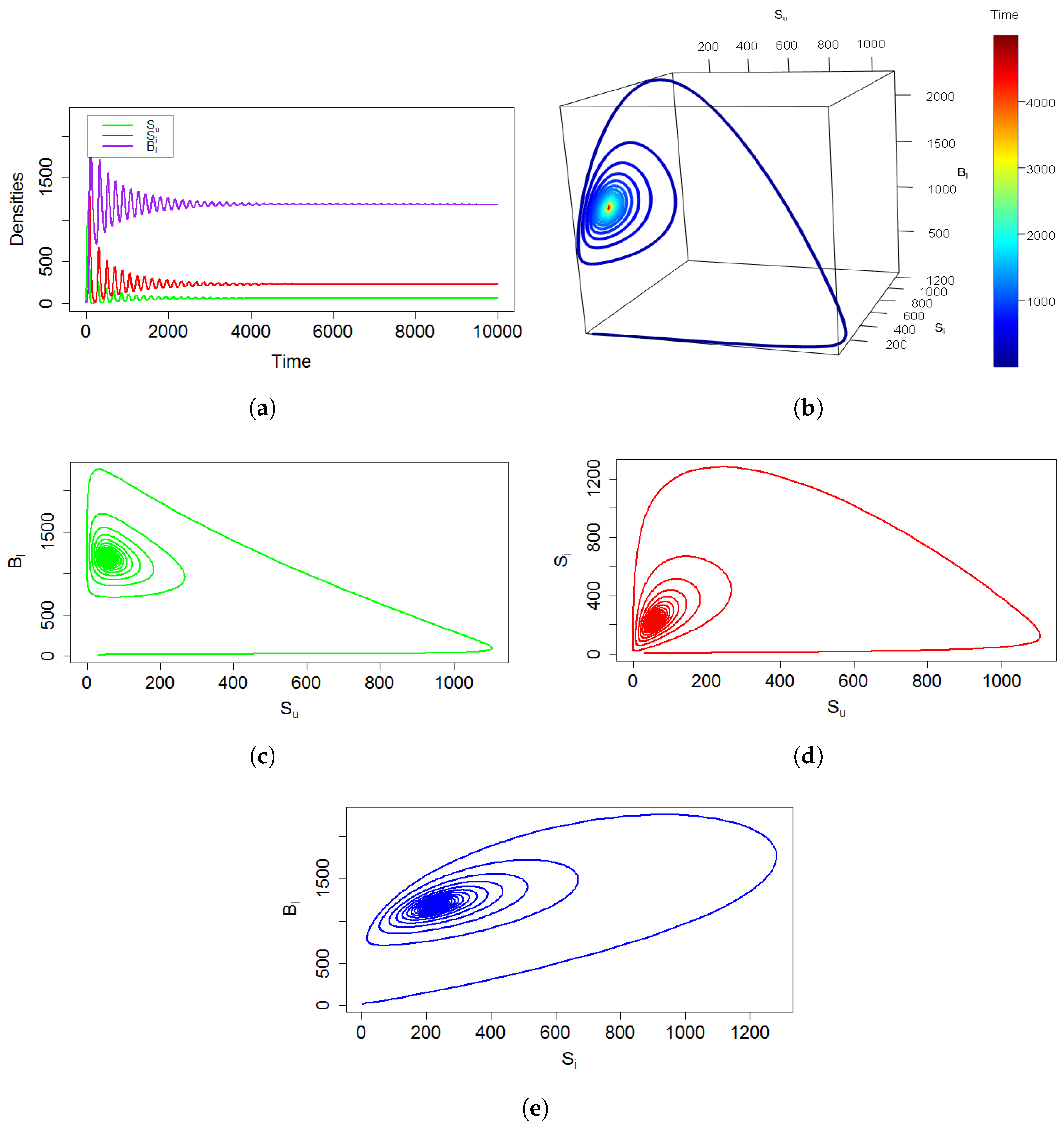
We now move on to understand the behavior of system (7) in the previous memory states, i.e., for the noninteger cases or fractional-order cases for the value of
. Considering
,
Figure 3 shows that system (7) produces oscillatory solutions and stable limit cycles for
, while
cell,
cell and
bacteria reach the stable concentrations of approximately 50 mm
, 120 mm
and 1100 mm
, respectively, at the endemic steady state
described in
Figure 4.
Next, a comparison of system (7)’s behavior is investigated for two different values of
. Keeping the whole parameter set fixed, we varied the fractional order from
to
. The numerical outcomes in
Figure 5 exhibit unstable behavior with sustained oscillations of the cell population densities of system (7) for
, but moving towards the previous memory state for
,
Figure 6 shows that after a little initial fluctuation, the system state populations become asymptotically stable. In addition, in
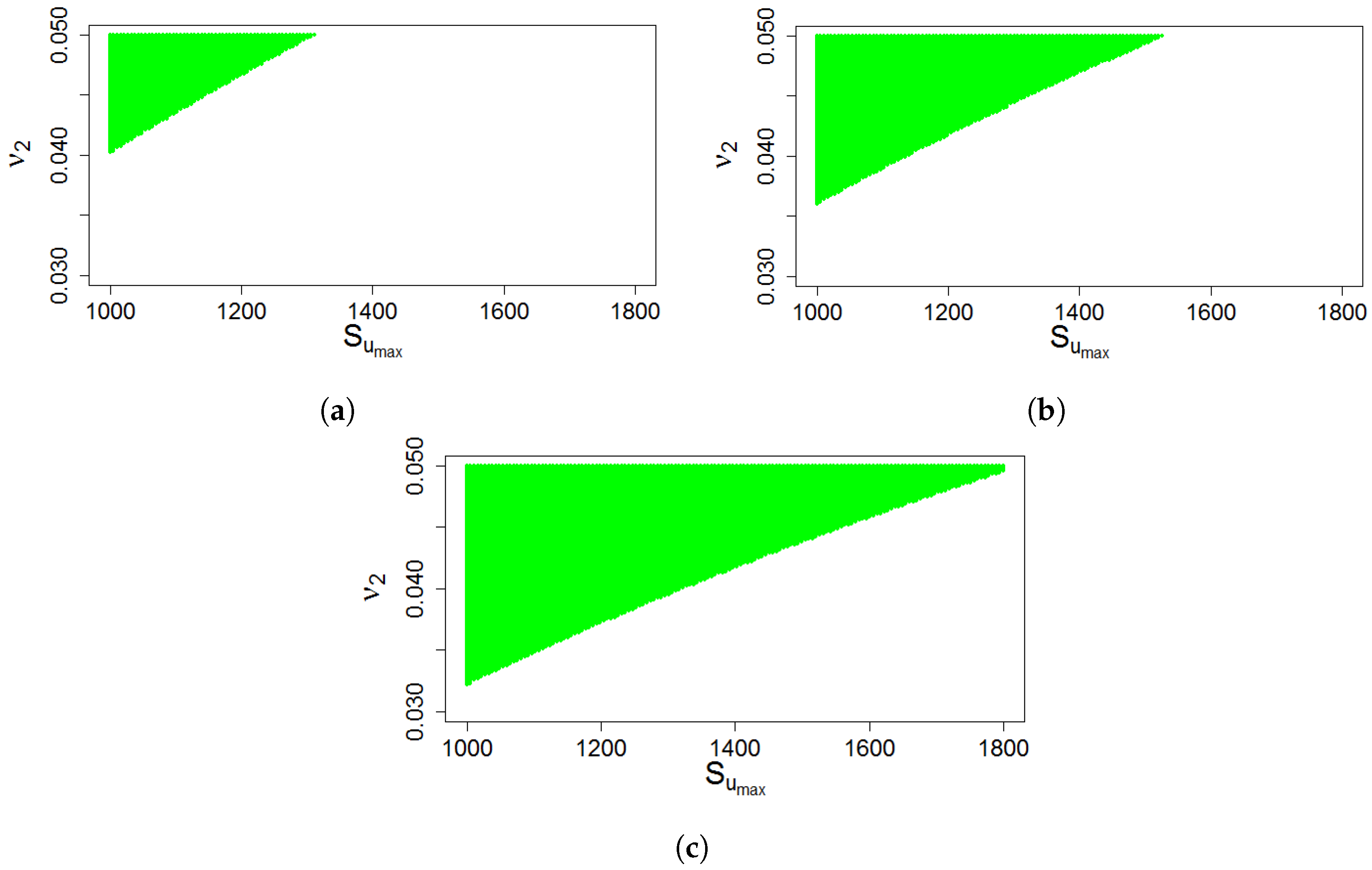
Figure 7, the stability regions of the interior equilibrium
for the CF fractionalized system (7) for three different values of
, i.e., for
, are clearly demonstrated in
Figure 7a,
Figure 7b and
Figure 7c, respectively.
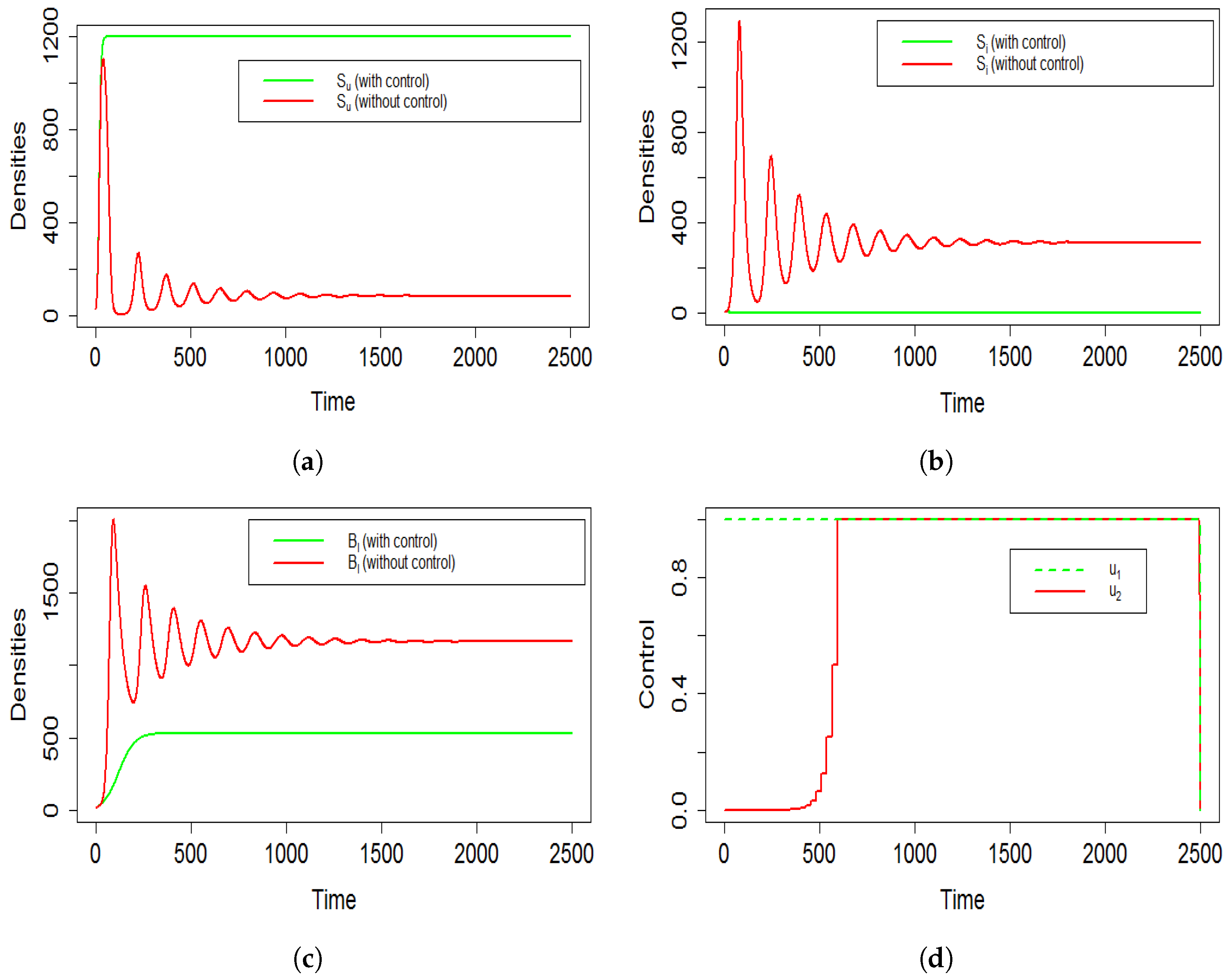
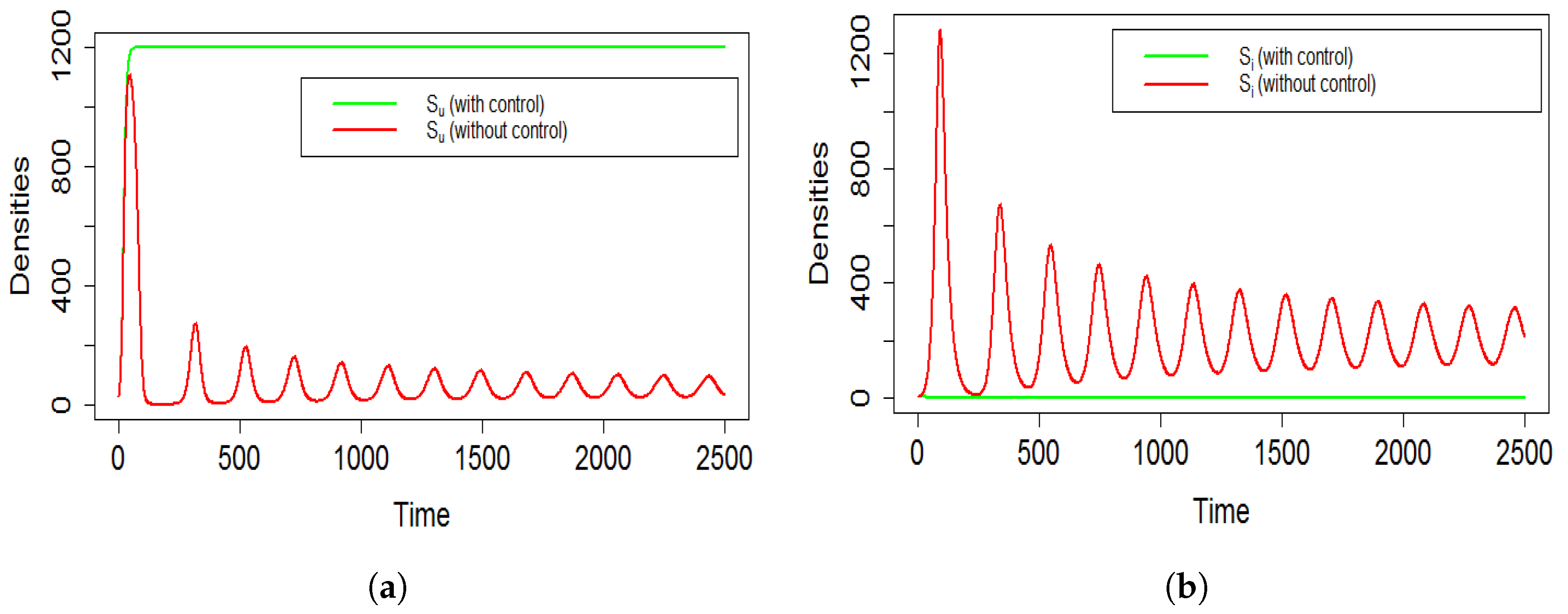
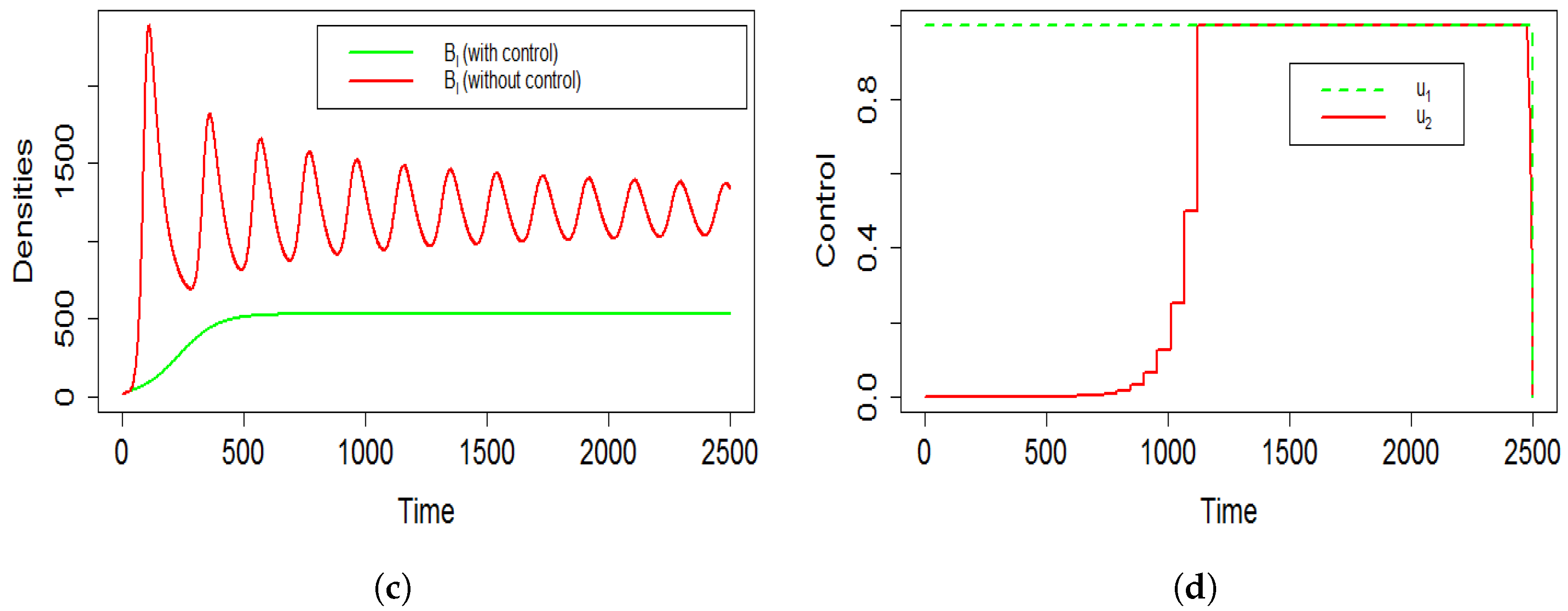
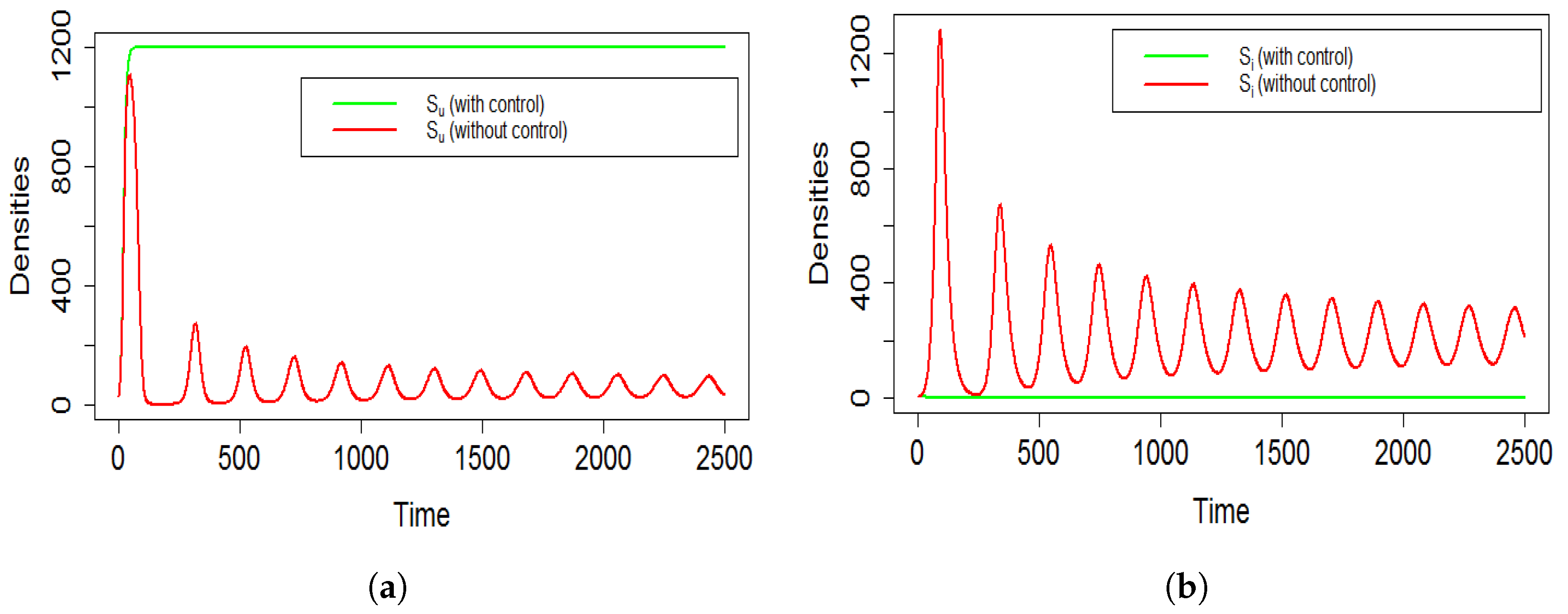
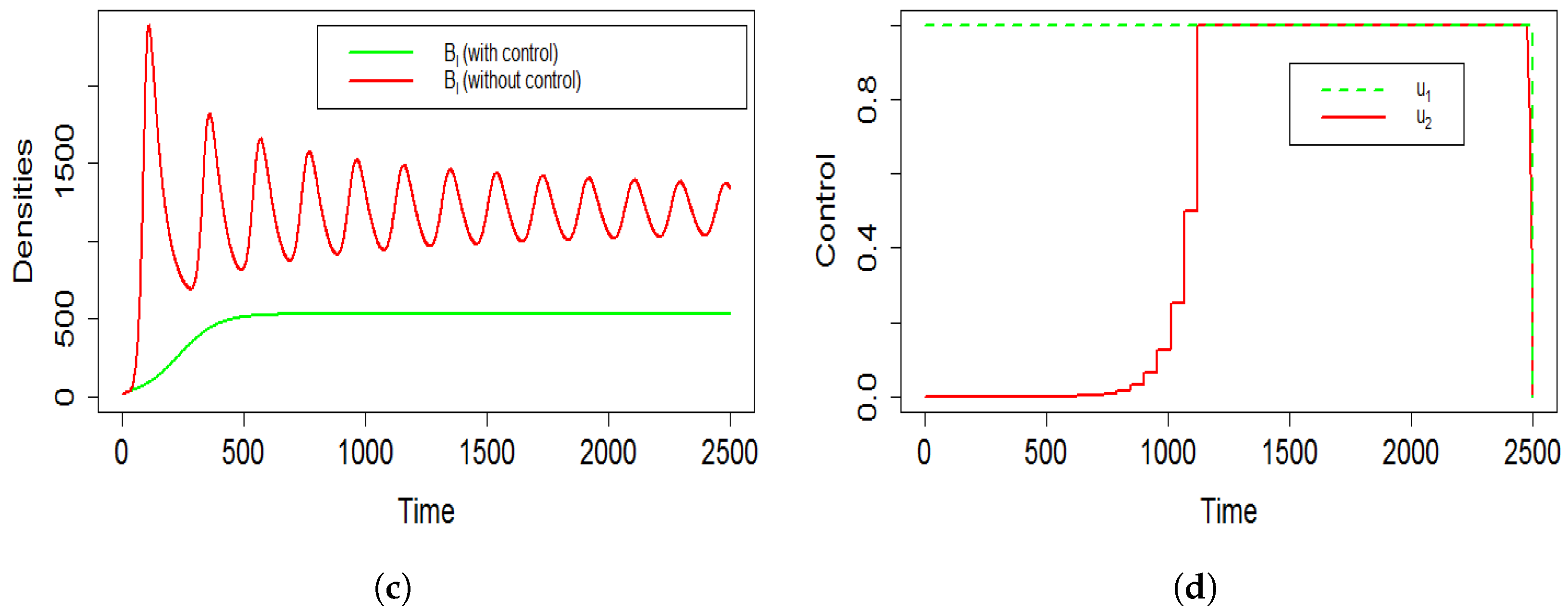
In
Figure 8 and
Figure 9, the effect of the optimal control treatment policy has been demonstrated on the Caputo–Fabrizio fractionalized optimal control (CFOC) system for the fractional orders
and
, respectively. In both cases, the concentrations of healthy Schwann cells (
) are observed to be increased, and also the densities of
and
are decreased in the body of a leprosy-infected person. The bacterial concentration
decreases to 510 mm
in
Figure 8c, while it decreases to a stable concentration of 420 mm
depicted in
Figure 9c. This indicates that the CFOC system (27) acts better when more previous memory states are considered for
. Now, looking into the optimal control profiles of
and
, we can see that the drug therapy Dapsone denoted by
needs to be increased after 520 days in case of
, while it should be increased after nearly 1100 days up to the range 0.8–0.9 for
described in
Figure 8d and
Figure 9d, respectively. This happens due to the memory effect of
M. leprae-induced infection and as the previous memory stages of the bacteria are extremely correlated with the drug resistance scenarios during the treatment [
7]. Indeed, the
M. leprae bacteria are highly Dapsone-resistant [
39,
54]. To tackle the dissemination of leprosy into the human body and to effectively inhibit bacterial drug resistance, applying the optimal control treatment approach for the previous memory state of
is more realistic in nature and appropriate than the present state or the states very adjacent to
.
7. Discussion and Conclusions
Leprosy is a chronic infectious bacterial disease caused by the bacterium
M. leprae. Despite several attempts by clinical and experimental scientists in the past, complete elimination of leprosy has still not been attained. The drug resistance characteristics of the bacterium, its associated relapse problems, and designing a perfect drug dose regimen in a cost-effective way remain a great challenge [
37,
55,
56] for researchers worldwide. Applications of new innovative tools and techniques are essential in this situation. Keeping this in mind, we have formulated and analyzed a three-dimensional CF fractional-order-based mathematical system and, most importantly, investigated the impacts of memory effects on the CF fractionalized optimal control system by incorporating a combined drug therapy of Ofloxacin and Dapsone. In this section, we will discuss the crucial interpretations obtained from the analytical and numerical outcomes for both system (7) and system (27).
Firstly, we formulated an iterative scheme using the Laplace and inverse Laplace transformations in
Section 3.1. Following that, we established the stability of the solutions using Picard’s T-stability iterative criterion in Theorem 2 in
Section 3.2. For demonstrating the existence and uniqueness of the solutions (Theorem 3 in
Section 3.3 and
Section 3.4) of system (7), we used the well-known Banach fixed-point theorem and Arzela–Ascoli theorem. The formula for the basic reproduction number
was derived and the local asymptotic stability of
for the CF fractionalized system (7) was investigated with respect to the threshold value of
. Besides this, we also described the stability criterion of the endemic equilibrium
of system (7) in Theorem 5 in
Section 4. Furthermore, the CFOC system (27) was investigated by suitably defining the control set
in Equation (28) and the objective function (29) in
Section 5. A generalized FOCP was formed in (31) and optimality conditions were proven in detail for this FOCP denoted by (42). Then, the formulas in (42) were applied to achieve the necessary and sufficient optimality conditions for system (27), and also the values of the optimal control pair
and
and the co-state or the adjoint equations with the corresponding transversality conditions were described elaborately in Theorem 7.
In 2021, Ghosh et al. [
19] described three strategies and, among them, Strategy-III was found to be the most effective one. However, serious matters of concern in determining a realistic and accurate therapy for leprosy are the high cost and extreme adverse effects of the combined drug therapy. Here, in this research article, from
Figure 8d and
Figure 9d, we can observe that after introducing the memory effect, the amount of the drugs needed initially is much less for system (27) than for Strategy-III in both the memory-free model and integer-ordered system, which is much better in terms of cost-effectiveness and safe therapeutics.
Furthermore, comparing
Figure 8 and
Figure 9, we can notice that if the value of
is decreased from
to
, oscillatory solutions appear for the specific range of the parameter set, but in both cases, under the optimal treatment policy, the densities of the cell populations approach a stable concentration. The dynamics of the optimal control profile of Ofloxacin remain almost similar for both
, but the control profile of Dapsone provides notable differences. More specifically, for
, the drug dose of Dapsone, i.e.,
, needs to be increased after 1100 days to tackle the highly Dapsone-drug-resistant
M. leprae [
39,
54] and the associated infection procedure. Thus, to build a perfect regimen for combined therapy, acquiring enough knowledge from the previous memory states about drug-resistance issues [
38,
57,
58] is essential and, hence, CFOC system (27) with
is very fruitful in this context. The more we reduce the value of
and approach the previous memory states, the more accurate the precision will be. Still, future works on leprosy in this aspect should also focus on investigating the memory stages for the value of
, and before implementation, the outcomes should be validated properly by clinical and experimental researchers.
The memory effect for a biological problem actually involves the entire history before the present instant, and the implication of fractional calculus can be viewed as a suitable and exclusive tool for modeling these types of phenomena with hysteresis. Our present study reveals that the whole M. leprae-induced infection in leprosy not only depends on the present state but also on the previous memory stages of the infection process. With the different circumstances and effects that the whole infection mechanism experiences in various memory stages, the CF fractionalized system responds differently to the current conditions. The knowledge accumulated by the metabolic activities in preceding stages confers fitness to the bacteria in an evolutionary way, which validates that the history-dependent drug-resistant behavior is essentially a clear manifestation of the memory effect in leprosy. Thus, to overcome the drug resistance scenario, high-cost-related problems and side-effects of the combined therapy more accurately and realistically, the three-dimensional Caputo–Fabrizio fractionalized optimal control mathematical model (27) for the fractional order presented in our research article should certainly be considered by mathematical and clinical scientists for all future studies on leprosy.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}