

A Double-Threshold Channel Estimation Method Based on Adaptive Frame Statistics



Abstract
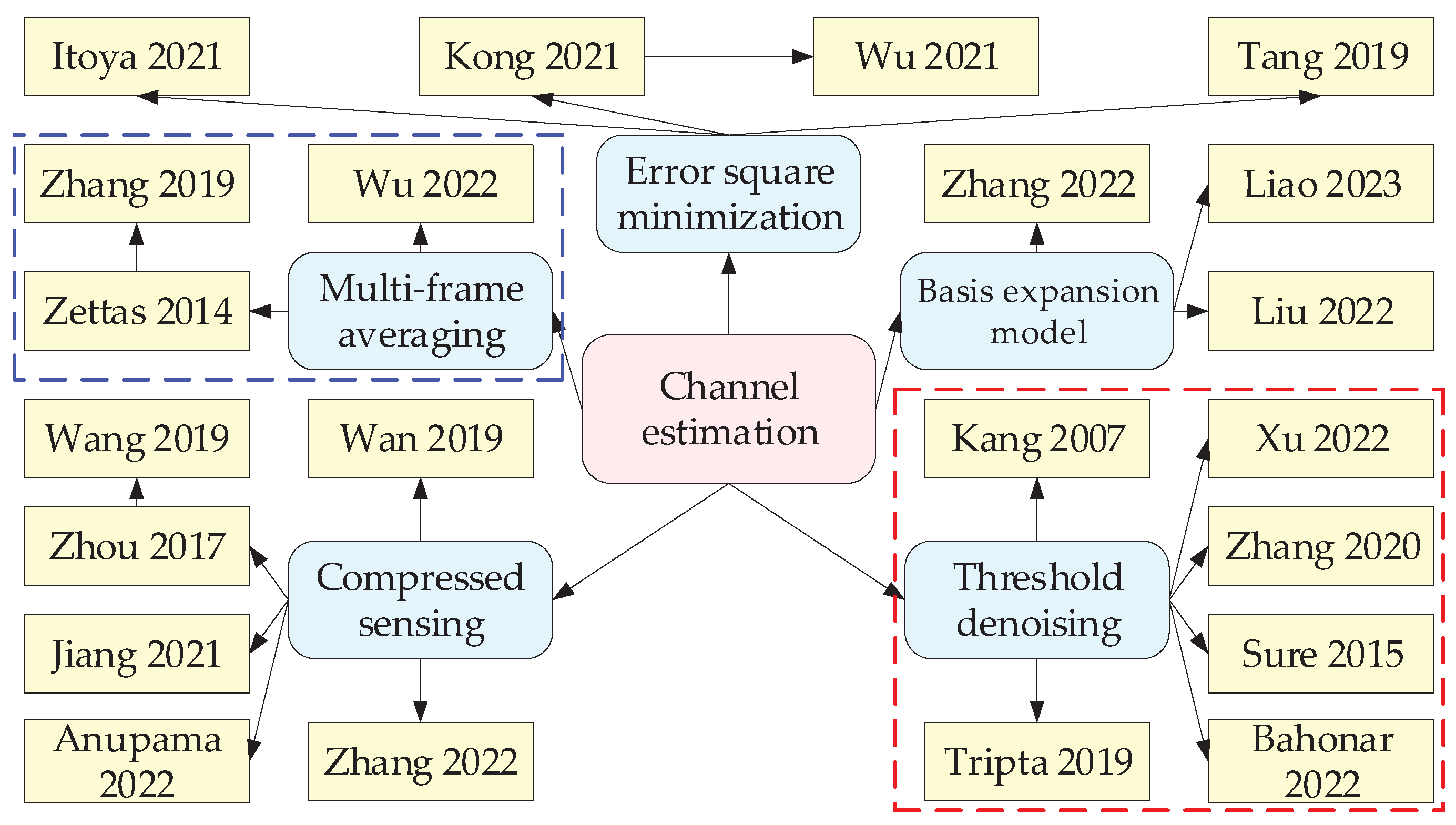
1. Introduction
- (1)
- The temporal correlation of the received signals is used to analyze the time-varying characteristics of the channel, so that the number of OFDM statistical frames can be adaptively determined.
- (2)
- The channel estimation accuracy is further improved by designing the DT based on the preliminary detection results combined with the distribution characteristics of the sampling points.
- (3)
- To fully utilize the cache resources and improve the performance of DT, a multi-frame averaging technique is used to expand the distinction between multipath and noise sampling points after the preliminary statistics.
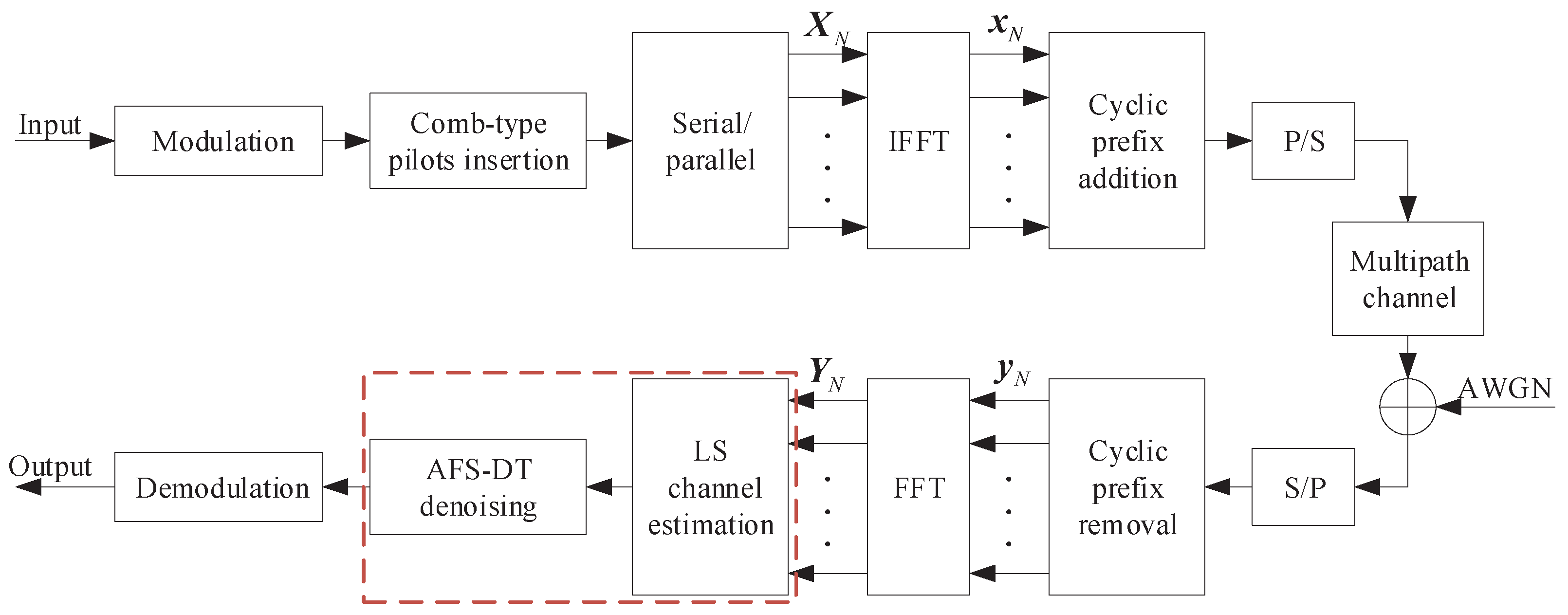
2. System Model
3. The Proposed Method
3.1. Channel Structure Detection and Optimization
3.2. Estimation of Multipath Power and Noise Power
3.3. Determination of P
4. Simulation Results
4.1. Simulation Environments and Performance Metrics
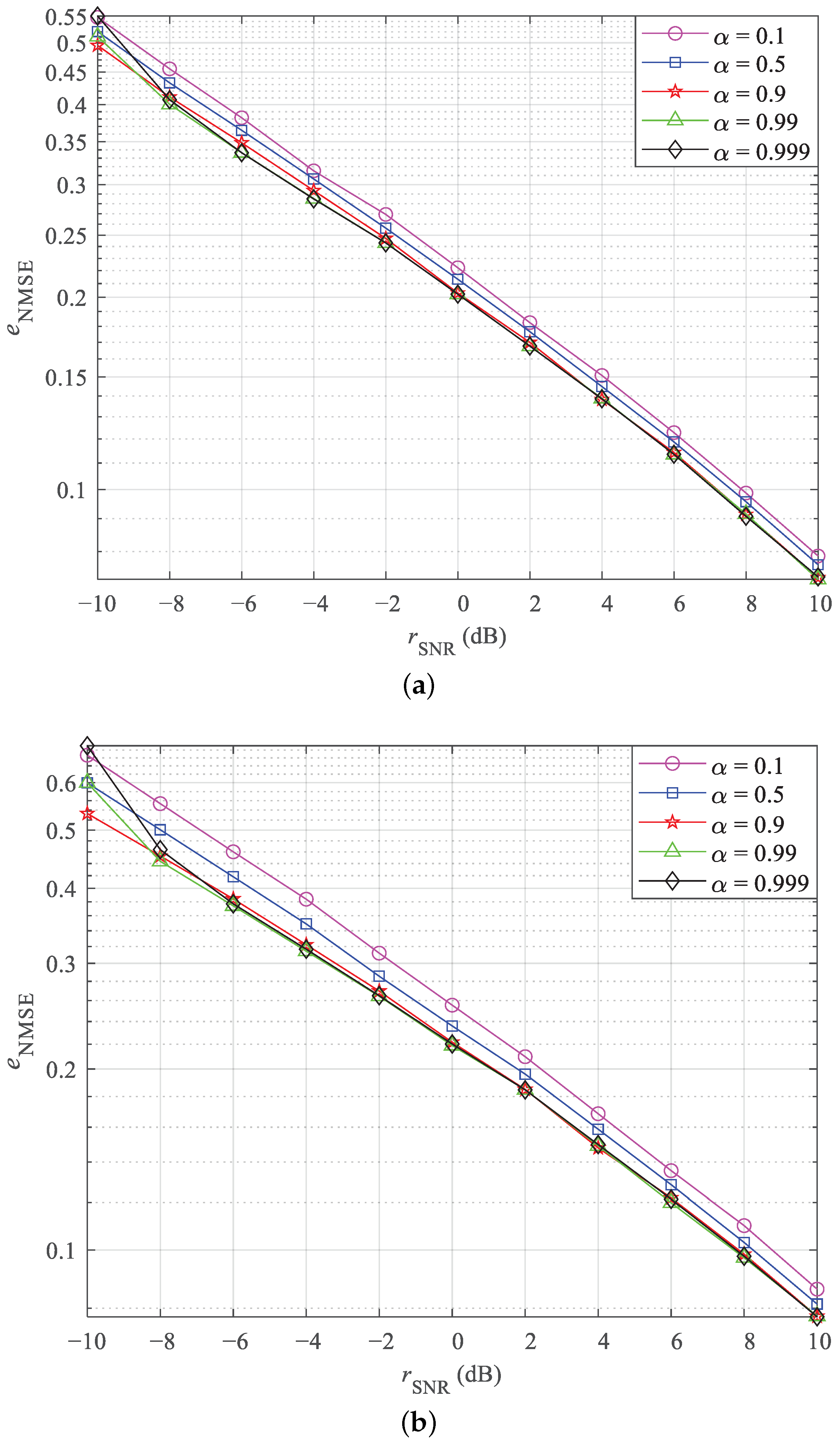
4.2. Determination of
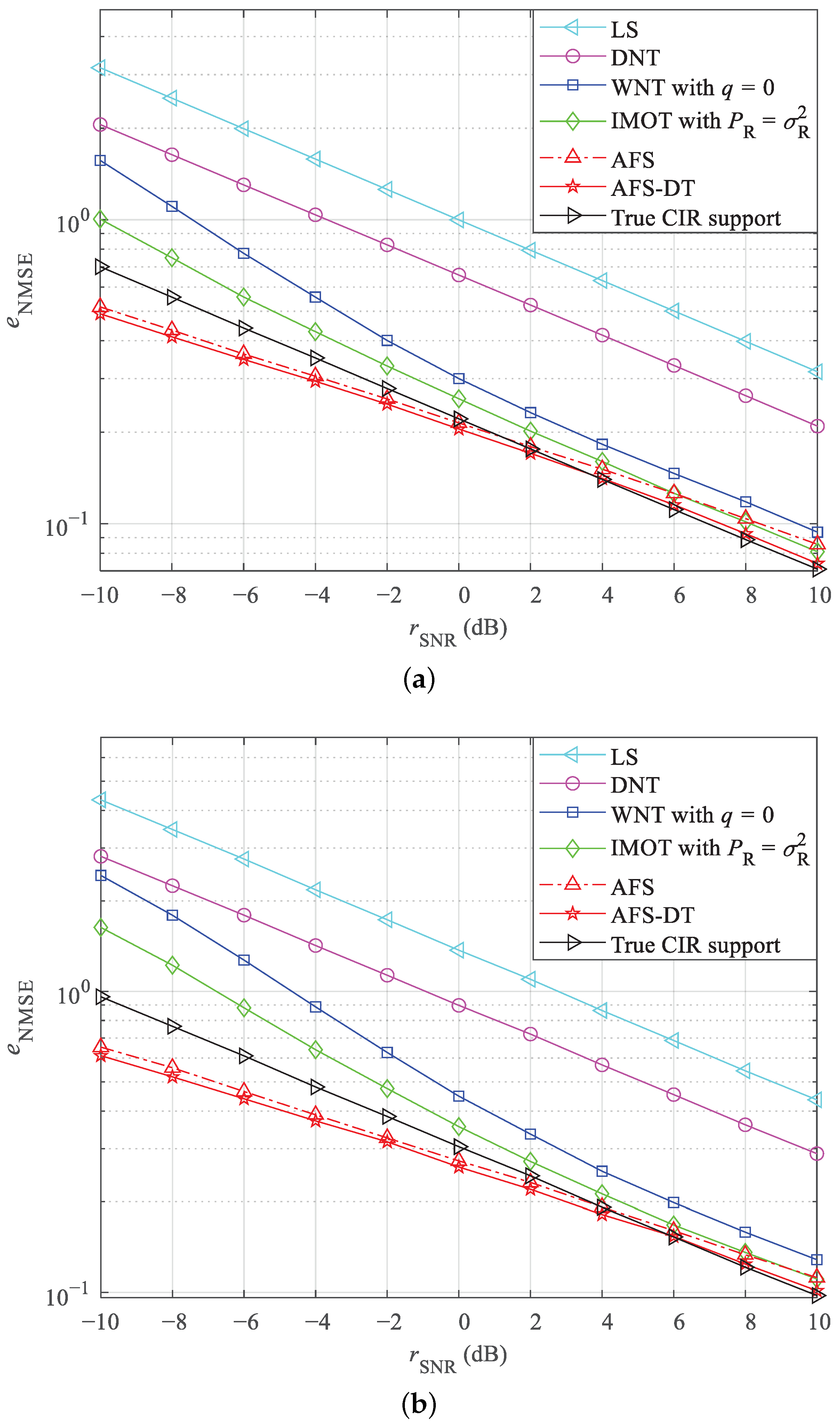
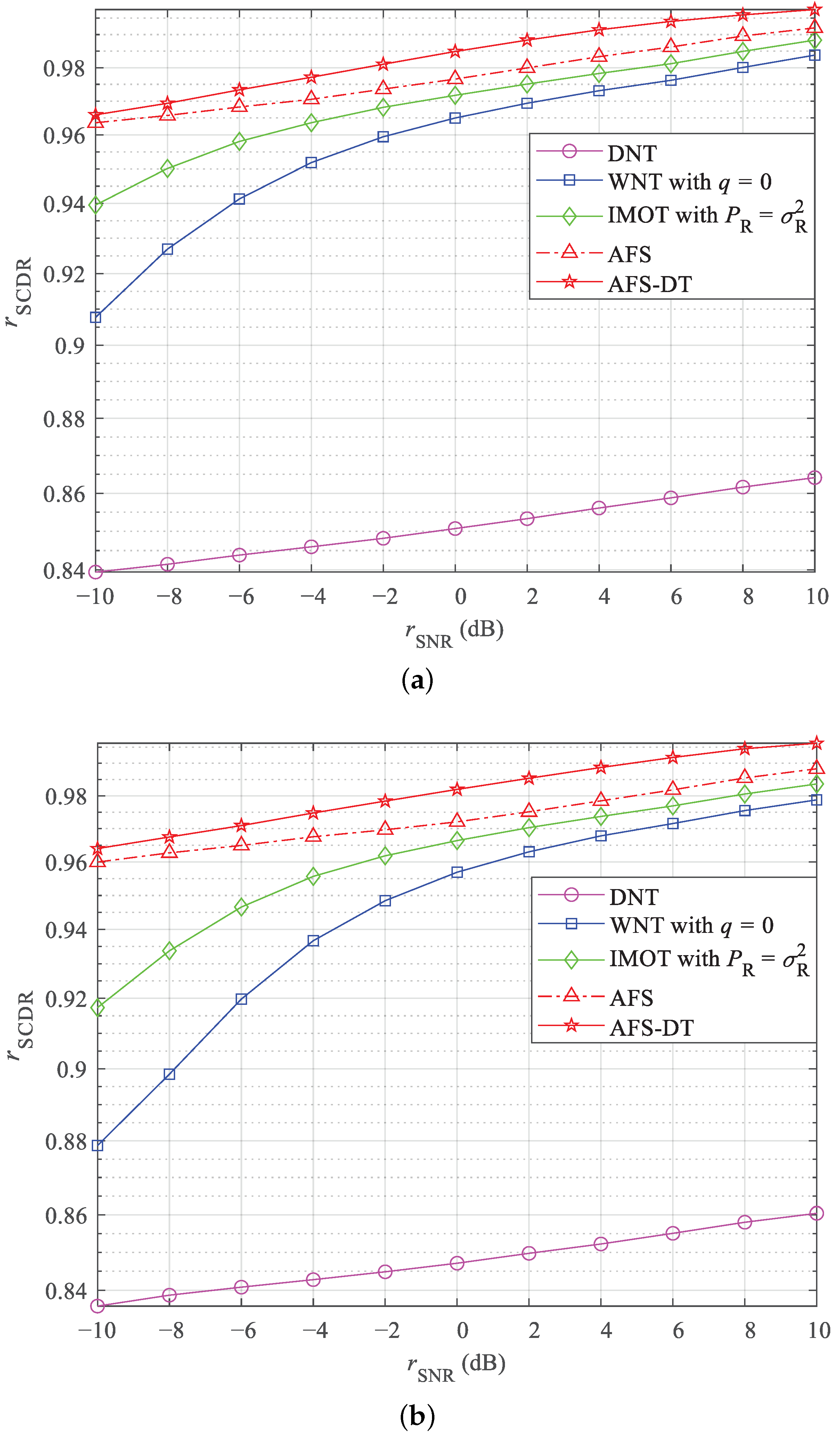
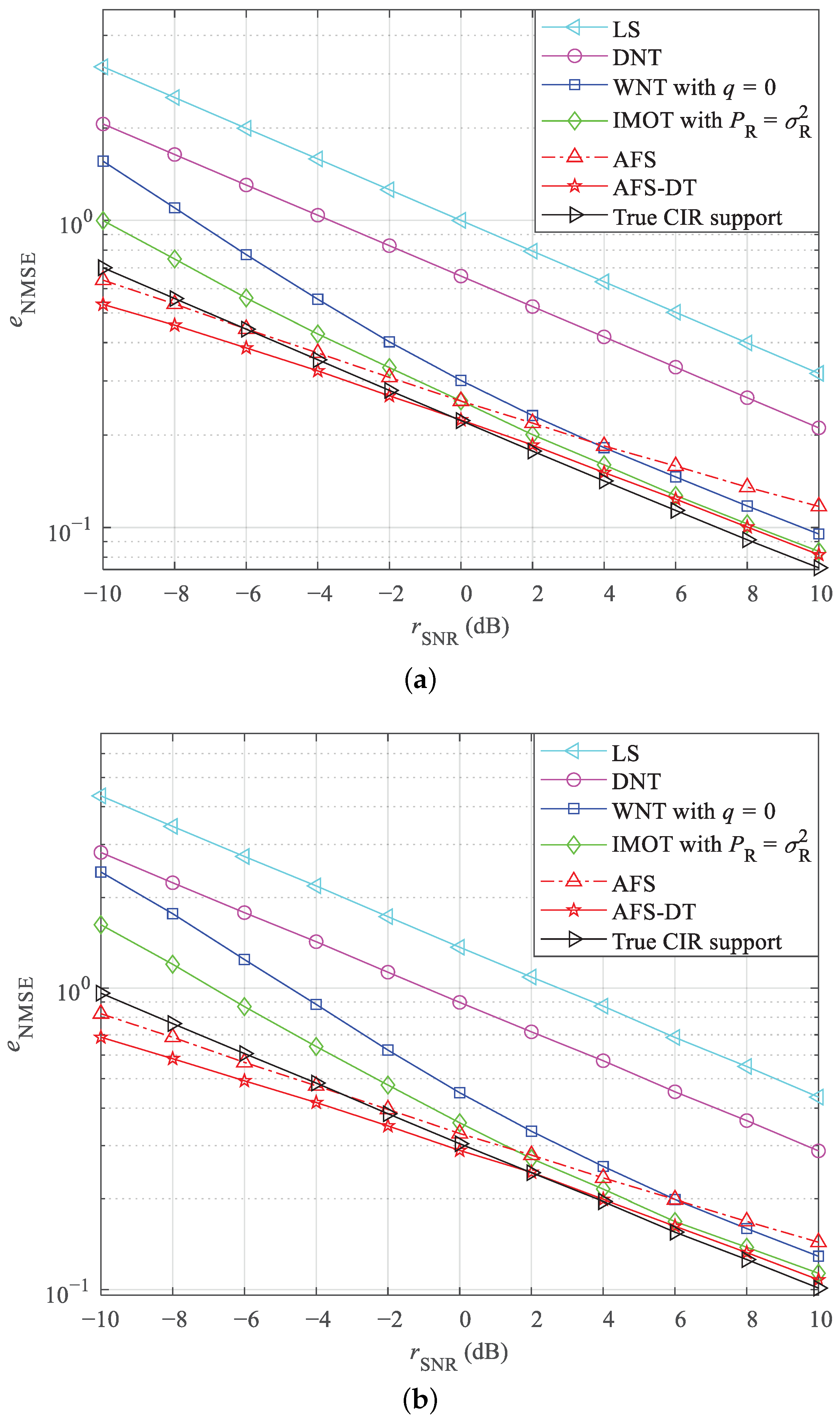
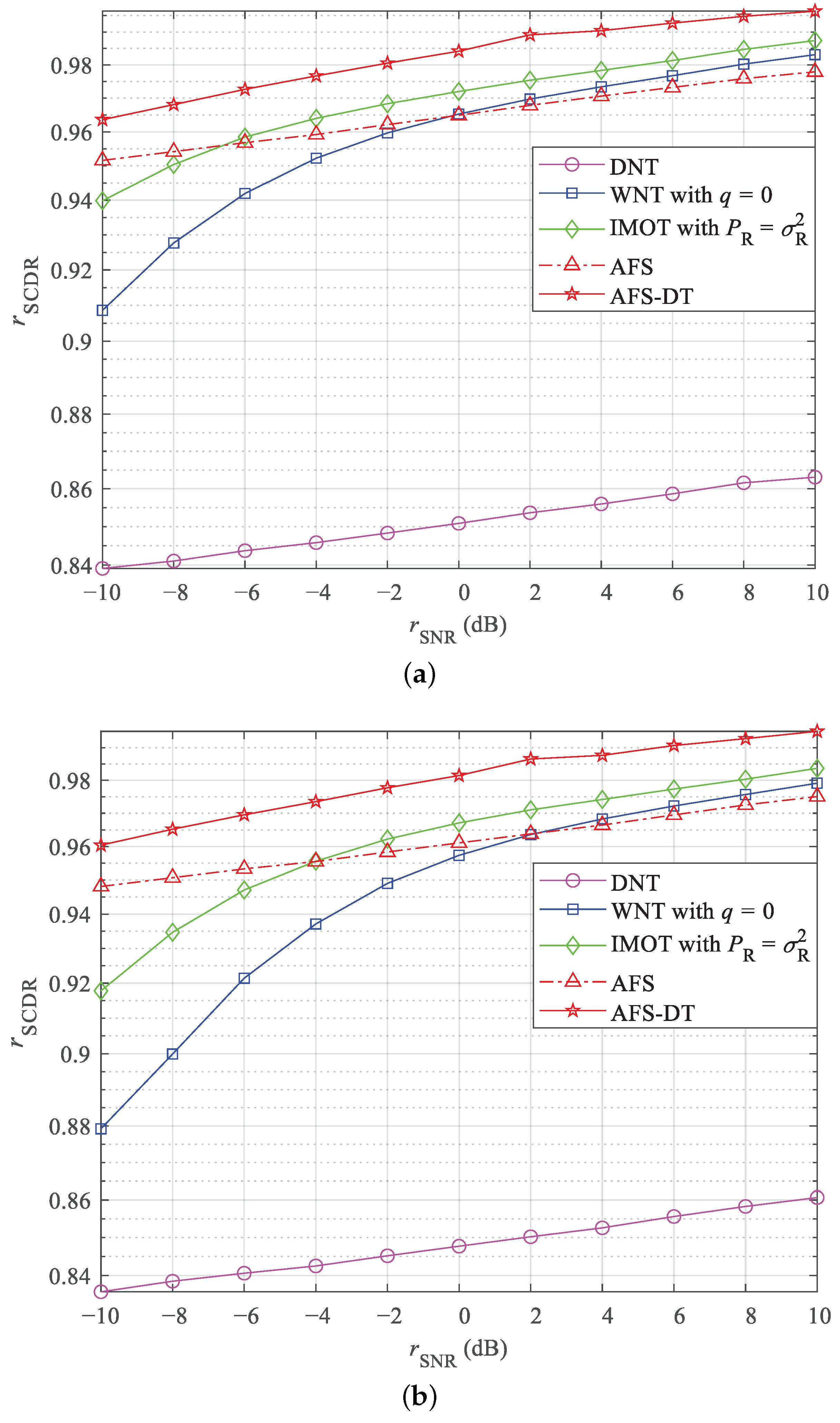
4.3. Analysis of NMSE and SCDR
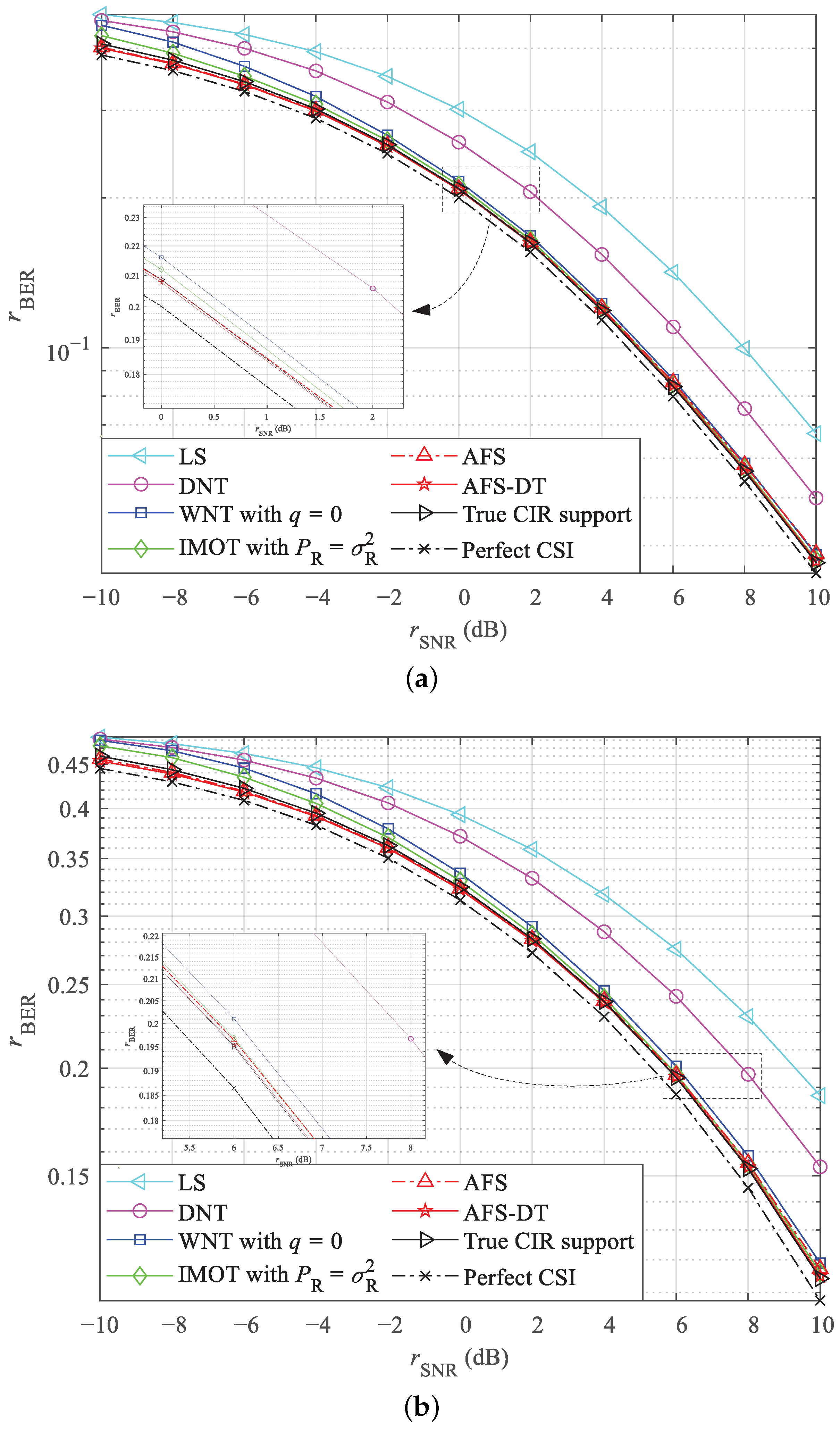
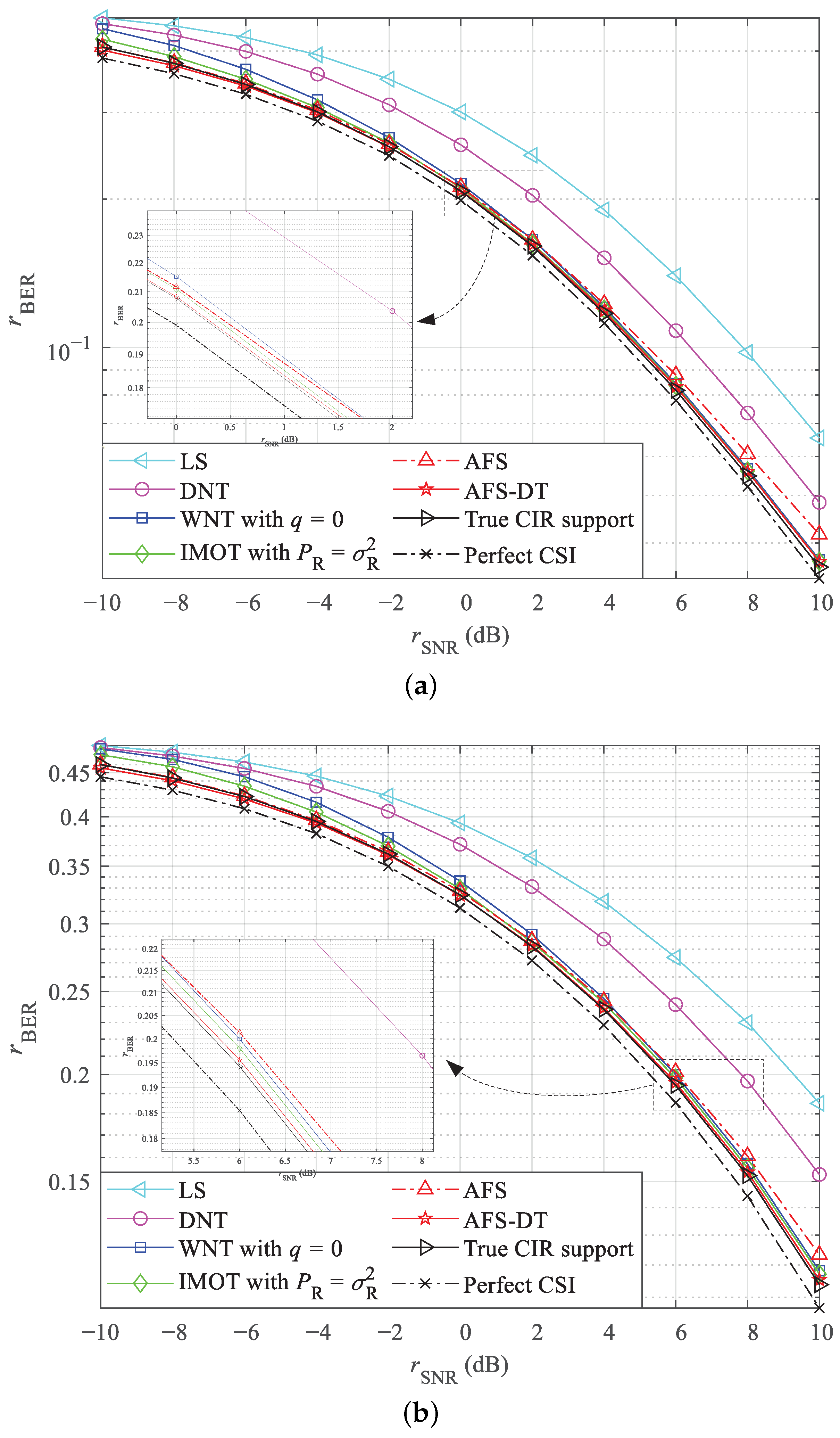
4.4. Analysis of BER
4.5. Analysis of Computational Complexity
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Huang, Y.; Hu, S.; Wu, G. A TDMA approach for OFDM-based multiuser RadCom systems. China Commun. 2023, 20, 93–103. [Google Scholar] [CrossRef]
- Lang, O.; Hofbauer, C.; Feger, R.; Huemer, M. Range-division multiplexing for MIMO OFDM joint radar and communications. IEEE Trans. Veh. Technol. 2023, 72, 52–65. [Google Scholar] [CrossRef]
- Xiang, Y.; Xu, K.; Xia, B.; Cheng, X. Bayesian joint channel-and-data estimation for quantized OFDM over doubly selective channels. IEEE Trans. Wirel. Commun. 2023, 22, 1523–1536. [Google Scholar] [CrossRef]
- Gurbilek, G.; Koca, M.; Coleri, S. Blind channel estimation for DCO-OFDM based vehicular visible light communication. Phys. Commun. 2023, 56, 101942. [Google Scholar] [CrossRef]
- Jia, S.; Zou, S.; Zhang, X.; Da, L. Underwater acoustic channel estimation based on sparse Bayesian learning algorithm. IEEE Access 2023, 11, 7829–7836. [Google Scholar] [CrossRef]
- He, S.; Zhang, Q.; Qin, J. Pilot pattern design for two-dimensional OFDM modulations in time-varying frequency-selective fading channels. IEEE Trans. Wirel. Commun. 2022, 21, 1335–1346. [Google Scholar] [CrossRef]
- Gong, B.; Gui, L.; Luo, S.; Guan, Y.L.; Liu, Z.; Fan, P. Block pilot based channel estimation and high-accuracy signal detection for GSM-OFDM systems on high-speed railways. IEEE Trans. Veh. Technol. 2018, 67, 11525–11536. [Google Scholar] [CrossRef]
- Mendonca, M.O.K.; Diniz, P.S.R.; Ferreira, T.N. Machine learning-based channel estimation for insufficient redundancy OFDM receivers using comb-type pilot arrangement. In Proceedings of the IEEE Latin-American Conference on Communications, Rio de Janeiro, Brazil, 30 November–2 December 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Zhang, C.; Li, D. Fast fading channel estimation for OFDM systems with complexity reduction. Chin. J. Electron. 2021, 30, 1173–1177. [Google Scholar] [CrossRef]
- Sun, Y.; Zhang, J.A.; Wu, K.; Liu, R.P. Frequency-domain sensing in time-varying channels. IEEE Wirel. Commun. Lett. 2023, 12, 16–20. [Google Scholar] [CrossRef]
- Itoya, Y.; Saito, S.; Suganuma, H.; Tomeba, H.; Onodera, T.; Maehara, F. Application of least-squares channel estimation to large-scale MU-MIMO-OFDM in the presence of terminal mobility. In Proceedings of the International Symposium on Intelligent Signal Processing and Communication Systems, Hualien City, Taiwan, 16–19 November 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–2. [Google Scholar] [CrossRef]
- Kong, D.; Xia, X.G.; Liu, P.; Zhu, Q. MMSE channel estimation for two-port demodulation reference signals in new radio. Sci. China-Inf. Sci. 2021, 64, 169303. [Google Scholar] [CrossRef]
- Wu, H. LMMSE channel estimation in OFDM systems: A vector quantization approach. IEEE Commun. Lett. 2021, 25, 1994–1998. [Google Scholar] [CrossRef]
- Tang, R.; Zhou, X.; Wang, C. Singular value decomposition channel estimation in STBC MIMO-OFDM system. Appl. Sci. 2019, 9, 3067. [Google Scholar] [CrossRef]
- Wu, Q.; Zhou, X.; Wang, C.; Qin, Z. Channel estimation based on superimposed pilot and weighted averaging. Sci. Rep. 2022, 12, 10293. [Google Scholar] [CrossRef] [PubMed]
- Zettas, S.; Lazaridis, P.I.; Zaharis, Z.D.; Kasampalis, S.; Cosmas, J. Adaptive averaging channel estimation for DVB-T2 using Doppler shift information. In Proceedings of the IEEE International Symposium on Broadband Multimedia Systems and Broadcasting, Beijing, China, 25–27 June 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 1–6, article no. 6873519. [Google Scholar] [CrossRef]
- Zhang, M.; Zhou, X.; Wang, C. A novel noise suppression channel estimation method based on adaptive weighted averaging for OFDM systems. Symmetry 2019, 11, 997. [Google Scholar] [CrossRef]
- Jin, J.; Chen, M.; Jiang, X.; Ai, B.; Wu, E. Iterative channel estimation and pilot design rules for high-mobility comb-pilot OFDM system. Int. J. Commun. Syst. 2019, 32, e3933. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhu, X.; Liu, Y.; Jiang, Y.; Guan, Y.L.; Lau, V.K.N. Hierarchical BEM based channel estimation with very low pilot overhead for high mobility MIMO-OFDM systems. IEEE Trans. Veh. Technol. 2022, 71, 10543–10558. [Google Scholar] [CrossRef]
- Liao, M.; Zakharov, Y. Estimation of time-varying channels in virtual angular domain for massive MIMO systems. IEEE Access 2023, 11, 1923–1933. [Google Scholar] [CrossRef]
- Liu, Y.; Guan, Y.L.; Gonzalez, G.D. BEM OTFS receiver with superimposed pilots over channels with Doppler and delay spread. In Proceedings of the IEEE International Conference on Communications, Seoul, Republic of Korea, 16–20 May 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 2411–2416. [Google Scholar] [CrossRef]
- Hasini, D.; Reddy, K.R.L. Channel estimation and signal detection in OFDM systems using deep learning. In Proceedings of the International Conference on Advanced Computing and Communication Systems, Coimbatore, India, 17–18 March 2022; IEEE: Piscataway, NJ, USA, 2023; pp. 1337–1340. [Google Scholar] [CrossRef]
- Ahmed, M.H.; Jamel, T.M.; Khazaal, H.F. A review: Deep learning aided channel estimation techniques for wireless communication system. In Proceedings of the Iraqi International Conference on Communication and Information Technologies, Basrah, Iraq, 7–8 September 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 7–12. [Google Scholar] [CrossRef]
- Zhao, X.; Yang, Q.; Zhang, Y. Synthesis of minimally subarrayed linear arrays via compressed sensing method. IEEE Antennas Wirel. Propag. Lett. 2019, 18, 487–491. [Google Scholar] [CrossRef]
- Abdallah, A.; Celik, A.; Mansour, M.M.; Eltawil, A.M. Deep learning-based frequency-selective channel estimation for hybrid mmWave MIMO systems. IEEE Trans. Wirel. Commun. 2022, 21, 3804–3821. [Google Scholar] [CrossRef]
- Mehrabi, M.; Tchamkerten, A. Error-correction for sparse support recovery algorithms. IEEE Trans. Inf. Theory 2022, 68, 7396–7409. [Google Scholar] [CrossRef]
- Wan, L.; Qiang, X.; Ma, L.; Song, Q.; Qiao, G. Accurate and efficient path delay estimation in OMP based sparse channel estimation for OFDM with equispaced pilots. IEEE Wirel. Commun. Lett. 2019, 8, 117–120. [Google Scholar] [CrossRef]
- Zhang, D.; Sun, Y.; Zhang, F.; Wan, Q. Phase retrieval for signals with block sparsity using BOMP: Algorithms and recovery guarantees. Digit. Signal Prog. 2022, 129, 103656. [Google Scholar] [CrossRef]
- Anupama, R.; Kulkarni, S.Y.; Prasad, S.N. Compressive spectrum sensing for wideband signals using improved matching pursuit algorithms. In Proceedings of the International Conference on Artificial Intelligence and Sustainable Engineering, Goa, India, 27–29 November 2020; Springer: Berlin/Heidelberg, Germany, 2022; pp. 241–250. [Google Scholar] [CrossRef]
- Jiang, T.; Song, M.; Zhao, X.; Liu, X. Channel estimation for millimeter wave massive MIMO systems using separable compressive sensing. IEEE Access 2021, 9, 49738–49749. [Google Scholar] [CrossRef]
- Zhou, Y.H.; Tong, F.; Zhang, G.Q. Distributed compressed sensing estimation of underwater acoustic OFDM channel. Appl. Acoust. 2017, 117, 160–166. [Google Scholar] [CrossRef]
- Wang, B.; Ge, Y.; He, C.; Wu, Y.; Zhu, Z. Study on communication channel estimation by improved SOMP based on distributed compressed sensing. EURASIP J. Wirel. Commun. Netw. 2019, 2019, 121. [Google Scholar] [CrossRef]
- Kang, Y.; Kim, K.; Park, H. Efficient DFT-based channel estimation for OFDM systems on multipath channels. IET Commun. 2007, 1, 197–202. [Google Scholar] [CrossRef]
- Tripta; Kumar, A.; Saha, S. Wavelet decomposition based channel estimation and digital domain self-interference cancellation in in-band full-duplex OFDM systems. In Proceedings of the URSI Asia-Pacific Radio Science Conference, New Delhi, India, 9–15 March 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–4, article no. 8738730. [Google Scholar] [CrossRef]
- Xu, L.S.; Yang, W.; Tian, H.X. A channel estimation method for ultrasonic through-metal communication. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2022, 69, 823–832. [Google Scholar] [CrossRef]
- Zhang, M.; Zhou, X.; Wang, C. Time-varying sparse channel estimation based on adaptive average and MSE optimal threshold in STBC MIMO-OFDM systems. IEEE Access 2020, 8, 177874–177895. [Google Scholar] [CrossRef]
- Sure, P.; Bhuma, C.M. Weighted-noise threshold based channel estimation for OFDM systems. Sadhana-Acad. Proc. Eng. Sci. 2015, 40, 2111–2128. [Google Scholar] [CrossRef]
- Bahonar, M.H.; Zefreh, R.G.; Amiri, R. Sparsity domain smoothing based thresholding recovery method for OFDM sparse channel estimation. In Proceedings of the 30th International Conference on Electrical Engineering, Tehran, Iran, 17–19 May 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 720–725. [Google Scholar] [CrossRef]
- Liao, Y.; Zhou, Q.; Zhang, N. EM-EKF fast time-varying channel estimation based on superimposed pilot for high mobility OFDM systems. Phys. Commun. 2021, 49, 101448. [Google Scholar] [CrossRef]
- Zhou, X.; Wang, C.; Tang, R.; Zhang, M. Channel estimation based on statistical frames and confidence level in OFDM systems. Appl. Sci. 2018, 8, 1607. [Google Scholar] [CrossRef]
- Cho, Y.S.; Kim, J.; Yang, W.Y.; Kang, C.G. MIMO-OFDM Wireless Communications with MATLAB; John Wiley & Sons (Asia) Pte. Ltd.: Singapore, 2010; pp. 15–19. [Google Scholar] [CrossRef]
- Wang, L.; Gao, C.; Deng, X.; Cui, Y.; Chen, X. Nonlinear channel estimation for OFDM system by wavelet transform based weighted TSVR. IEEE Access 2020, 8, 2723–2731. [Google Scholar] [CrossRef]
- Feng, S.; Wu, Q.; Dong, C.; Li, B. A spectrum enhanced ACO-OFDM scheme for optical wireless communications. IEEE Commun. Lett. 2023, 27, 581–585. [Google Scholar] [CrossRef]
- Yeh, H.G.; Zhou, J. Space-time parallel cancellation interleaved OFDM systems in impulsive noise and mobile fading channels. In Proceedings of the IEEE International Conference on Recent Advances in Systems Science and Engineering, Tainan, Taiwan, 7–10 November 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 1–7. [Google Scholar] [CrossRef]
- Boud, H.; Rao, R.K.; Rahman, Q. Outage performance for aeronautical satellite OFDM-IM system. In Proceedings of the IEEE 5th International Conference on Electronics and Communication Engineering, Xi’an, China, 16–18 December 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 39–45. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tap | VU | MR | |||
|---|---|---|---|---|---|
| Delay (s) | Power (dB) | Delay (s) | Power (dB) | ||
| 1 | 0.0 | 0.0 | 0.0 | 0.0 | |
| 2 | 0.3 | −0.5 | 0.5 | −1.3 | |
| 3 | 0.8 | −1.0 | 1.0 | −3.4 | |
| 4 | 1.6 | −4.1 | 1.8 | −6.8 | |
| 5 | 2.6 | −8.8 | 2.5 | −10.2 | |
| 6 | 3.3 | −12.6 | 3.1 | −12.9 | |
| 7 | 4.8 | −18.6 | 3.9 | −16.3 | |
| 8 | 5.8 | −21.6 | 4.8 | −19.5 | |
| 9 | 7.2 | −24.6 | 5.5 | −21.7 | |
| 10 | 10.8 | −20.7 | 6.4 | −23.3 | |
| 11 | 11.8 | −18.8 | 7.0 | −24.2 | |
| 12 | 12.6 | −19.5 | 9.0 | −25.8 | |
| Parameters | Specifications |
|---|---|
| System model | CP-OFDM |
| Channel distribution | Rayleigh |
| Baseband bandwidth B | 5 MHz |
| Modulation mode | 4QAM/16QAM |
| The number of OFDM frame K | 400 |
| Subcarrier number (without CP) N | 960 |
| CP length | 240 |
| Pilot interval | 3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, C.; Zhou, X.; Wang, C.; Ye, Z. A Double-Threshold Channel Estimation Method Based on Adaptive Frame Statistics. Mathematics 2023, 11, 3342. https://doi.org/10.3390/math11153342
Song C, Zhou X, Wang C, Ye Z. A Double-Threshold Channel Estimation Method Based on Adaptive Frame Statistics. Mathematics. 2023; 11(15):3342. https://doi.org/10.3390/math11153342
Chicago/Turabian StyleSong, Canghai, Xiao Zhou, Chengyou Wang, and Zhun Ye. 2023. "A Double-Threshold Channel Estimation Method Based on Adaptive Frame Statistics" Mathematics 11, no. 15: 3342. https://doi.org/10.3390/math11153342
APA StyleSong, C., Zhou, X., Wang, C., & Ye, Z. (2023). A Double-Threshold Channel Estimation Method Based on Adaptive Frame Statistics. Mathematics, 11(15), 3342. https://doi.org/10.3390/math11153342