
Adaptive End-Effector Buffeting Sliding Mode Control for Heavy-Duty Robots with Long Arms

 , , and
, , and
Abstract
:1. Introduction
- (1)
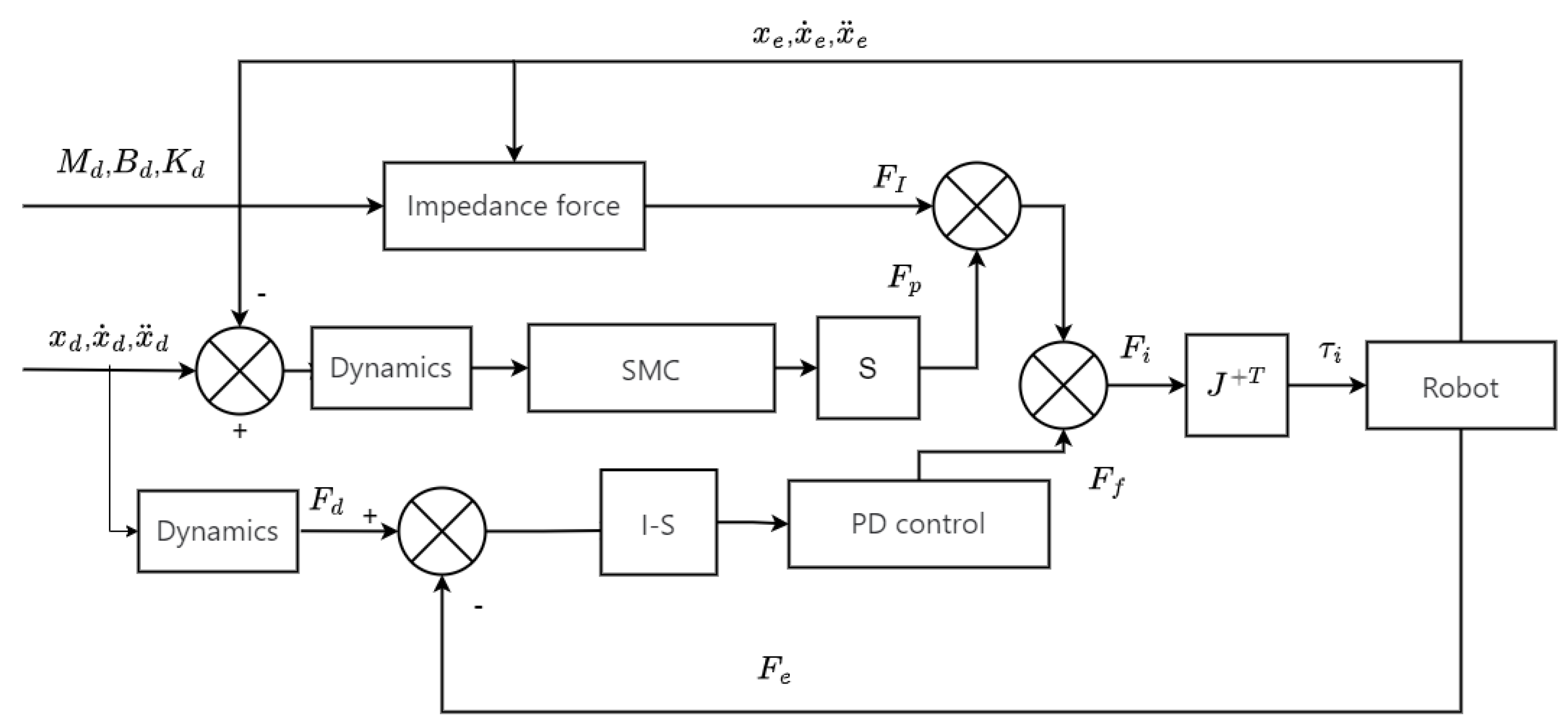
- In order to facilitate the control of long-arm heavy-duty robot, a hybrid force/position control and force-based impedance control scheme are proposed.
- (2)
- In order to solve the problem that the long telescopic arm of the long-arm heavy-duty robot faces deformations and the end-effector vibrates in the process of movement, a new power hybrid sliding-mode controller is proposed, and a strict mathematical proof is given by the Lyapunov method to verify the stability of the proposed controller. The effectiveness of the proposed power hybrid sliding-mode control is proved by comparing it with the simulation experiments of many new sliding-mode controllers.
2. Hybrid Force/Position Control Scheme
3. Kinematics and Dynamics Model of Long-Arm Heavy-Duty Robot
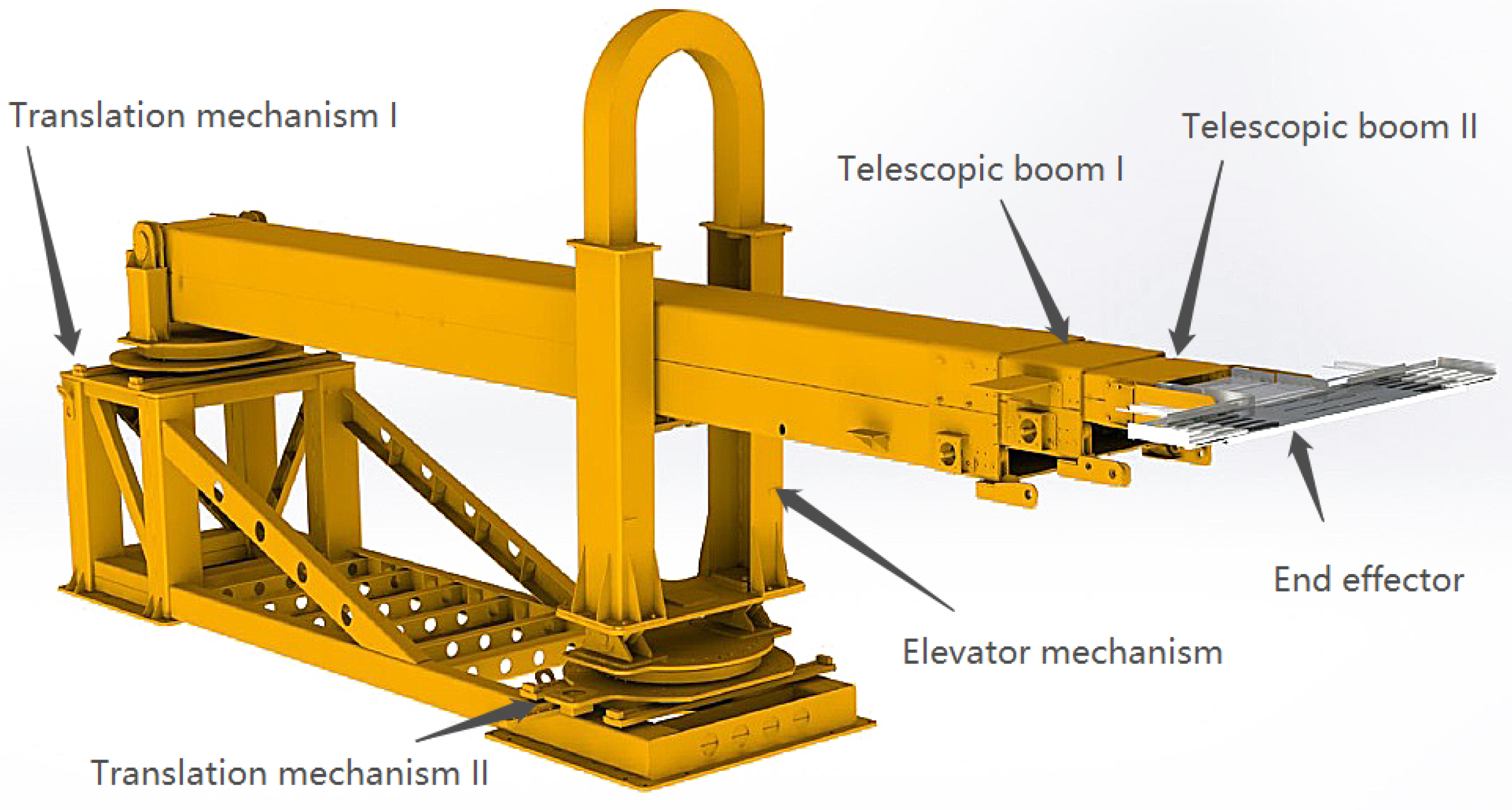
3.1. Long-Arm Heavy-Duty Robot Model
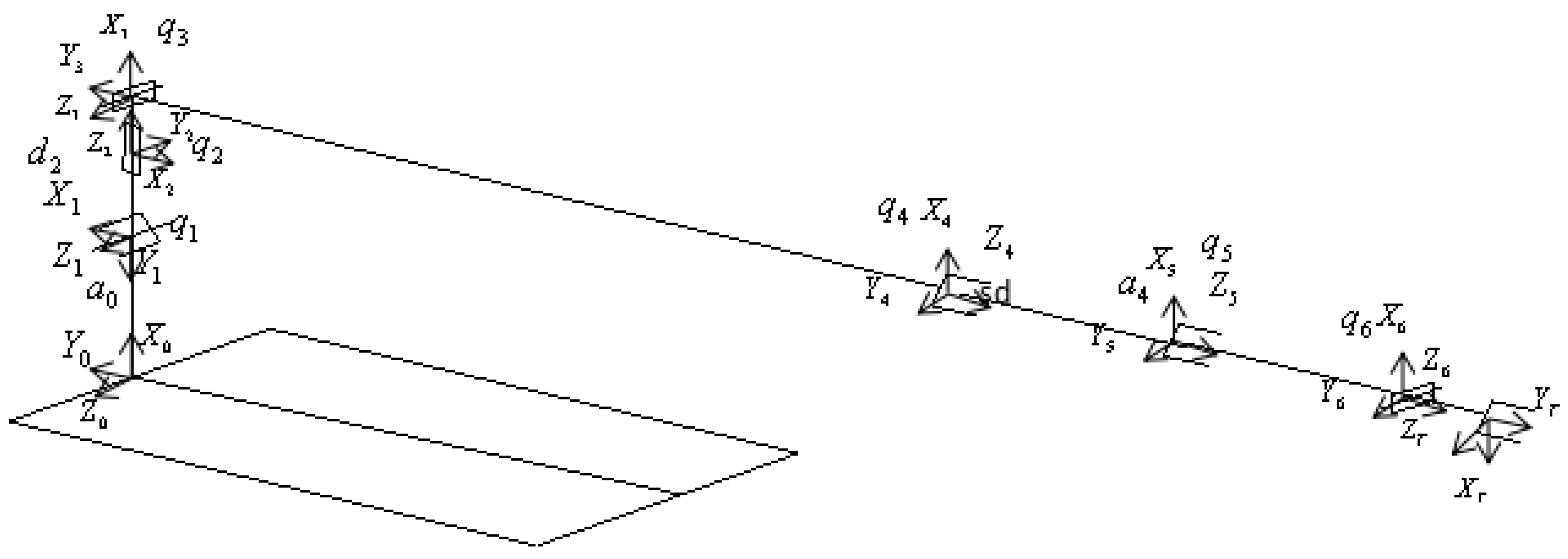
3.1.1. Kinematics of Heavy-Duty Robots with Long Arms
3.1.2. Dynamics Model of Long-Arm Heavy-Duty Robot
4. Design of a New Power Hybrid Sliding-Mode Controller
4.1. New Power Mixed Sliding-Mode Reaching Law
4.2. Lyapunov Stability Analysis
5. Simulation Platform Construction and Experimental Analysis
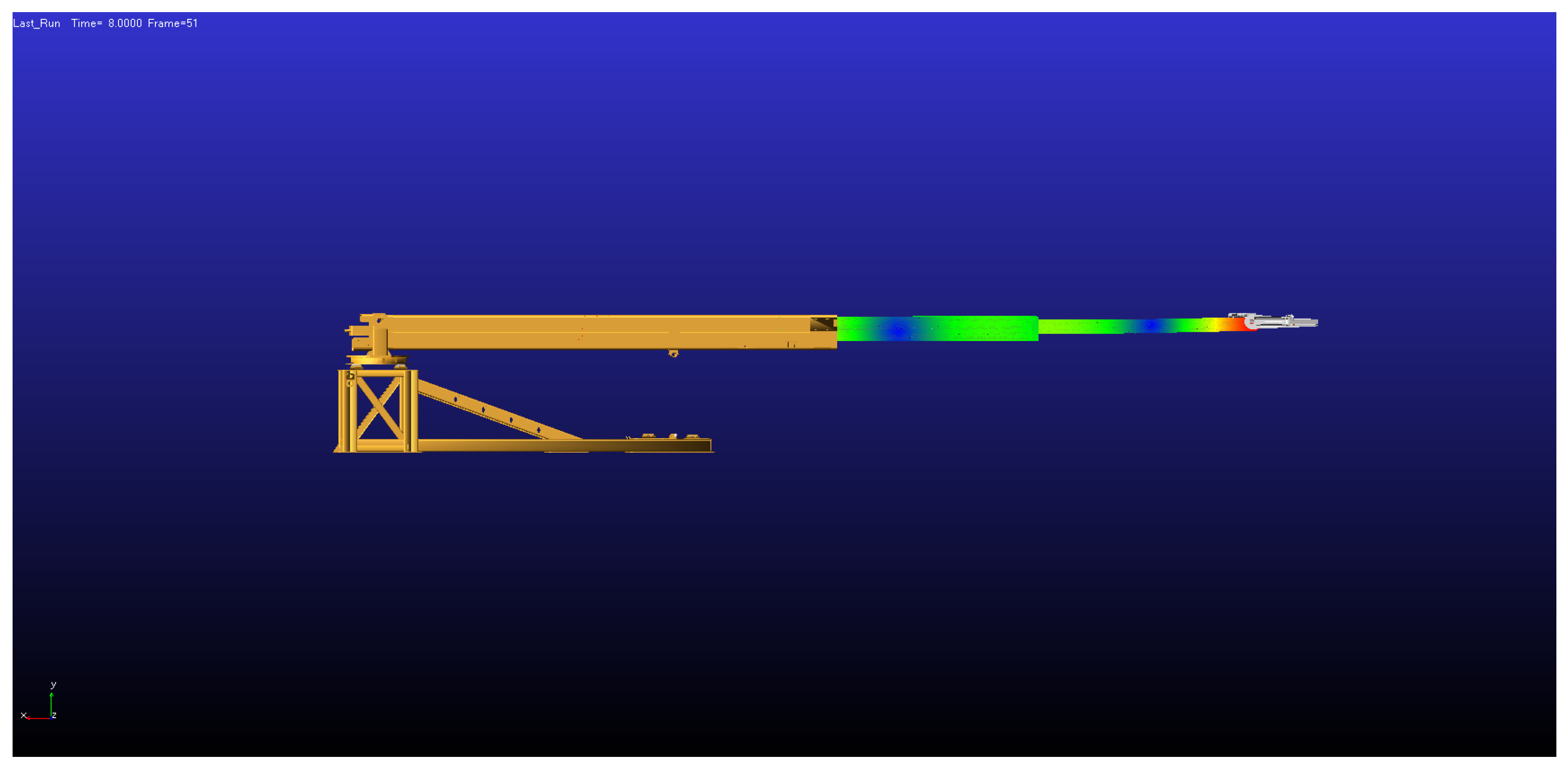
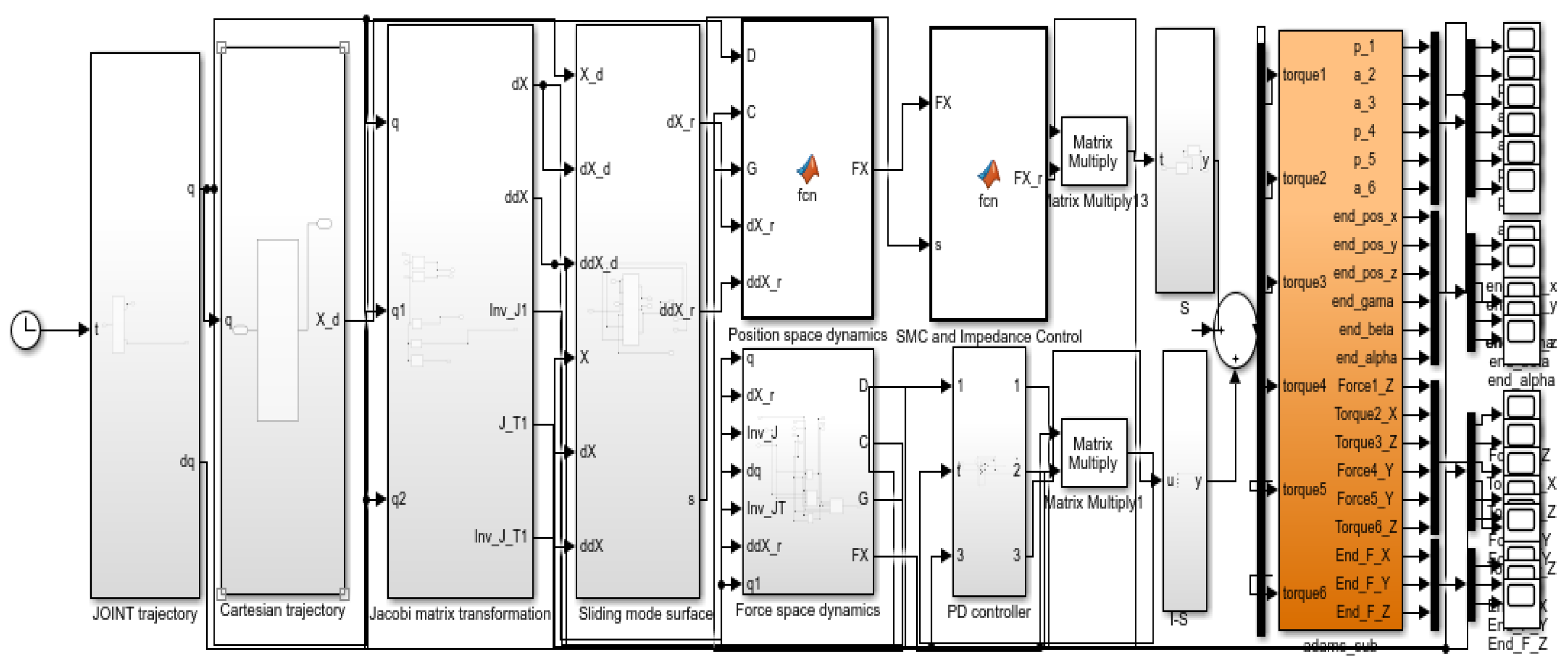
5.1. Simulation Platform Construction
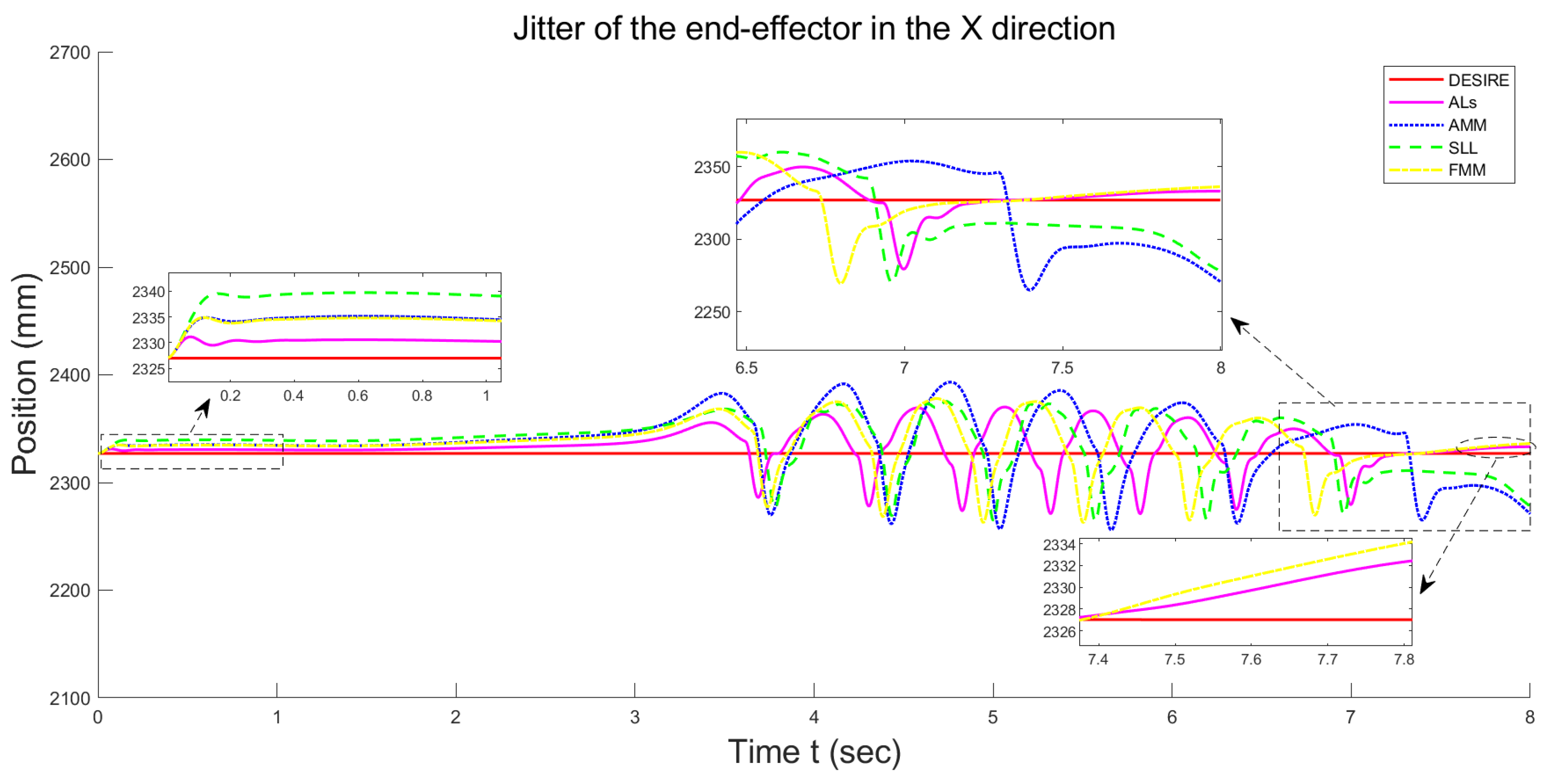
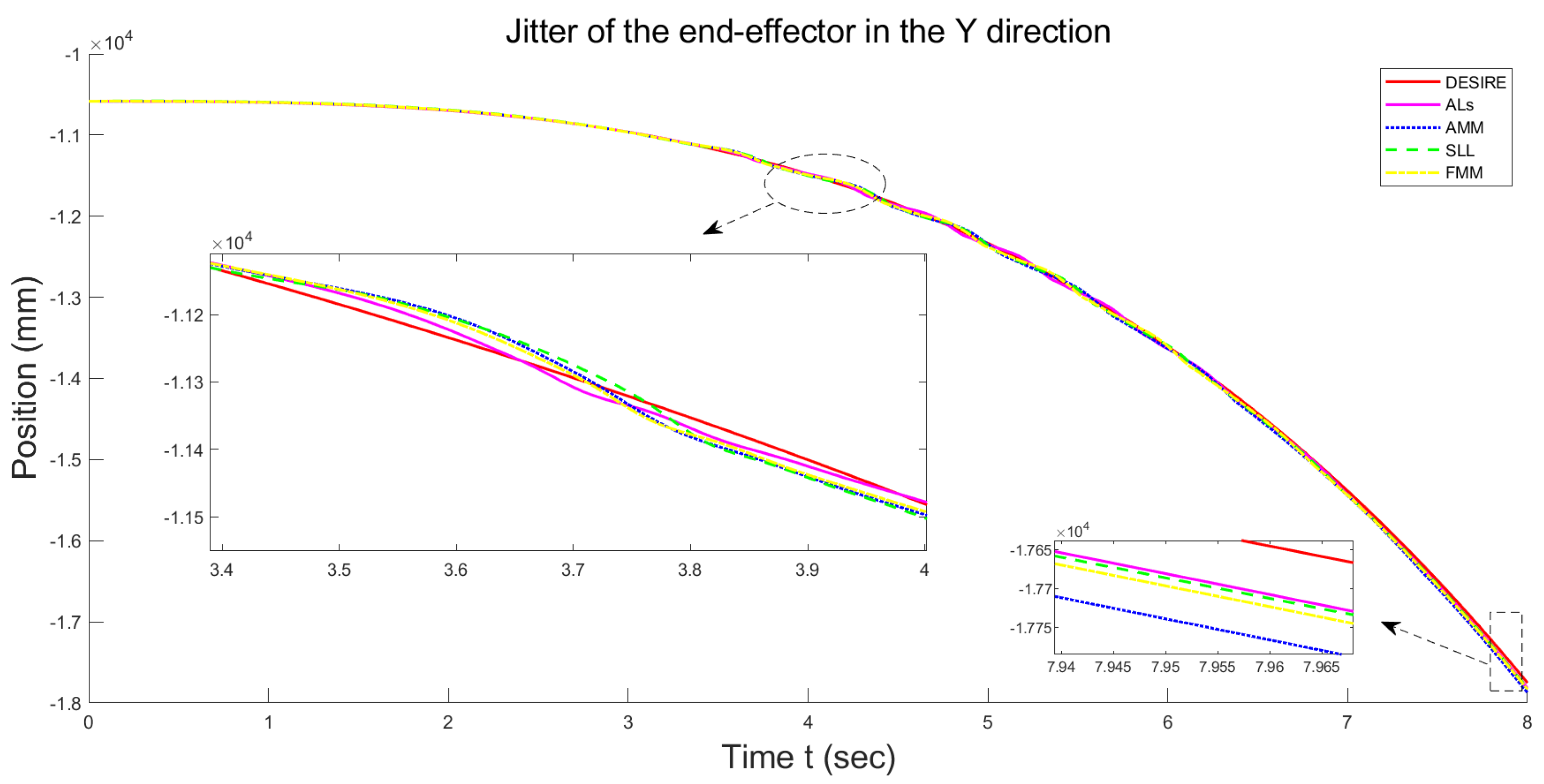
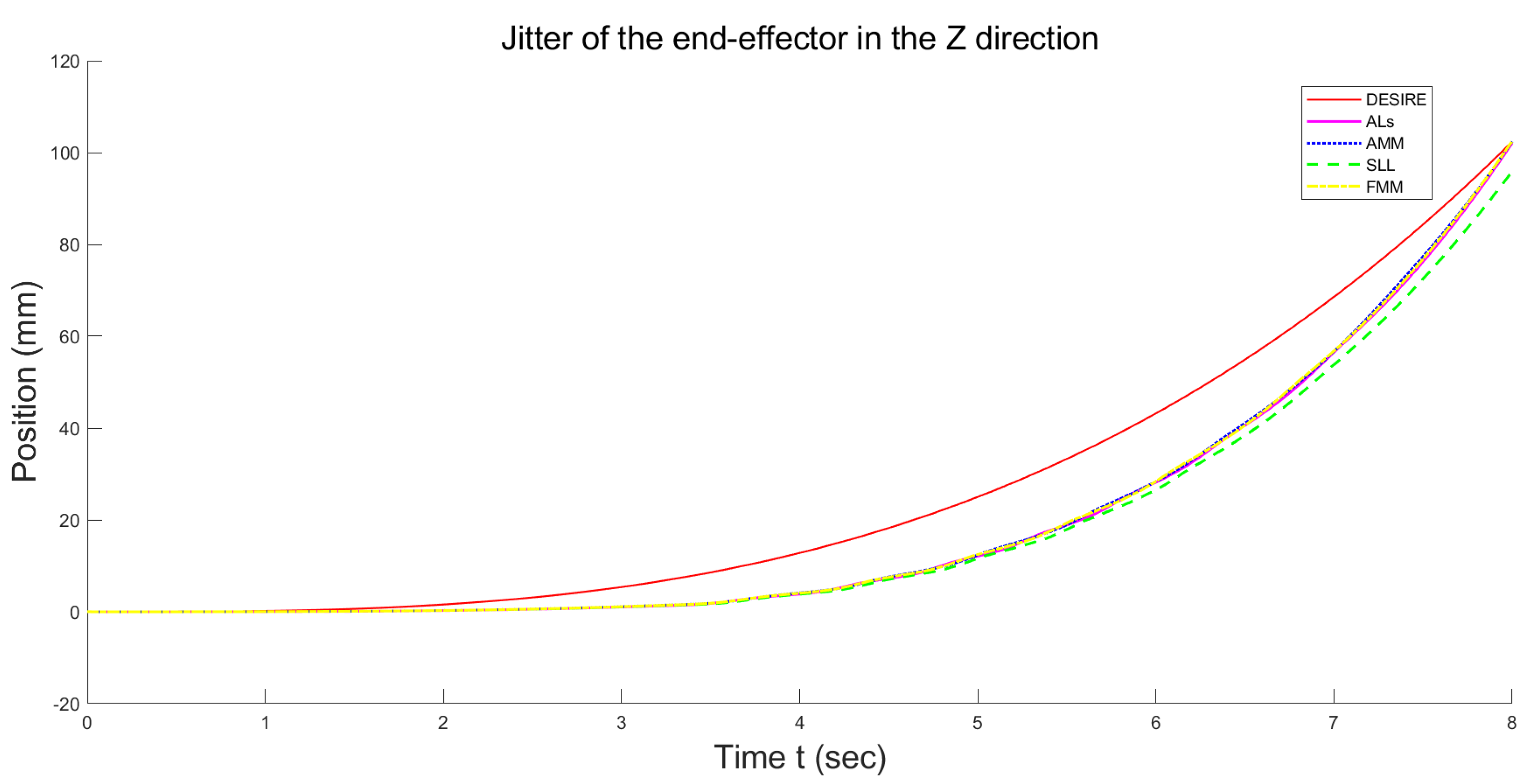
5.2. Simulation Experiment Analysis
5.3. Impedance Control Simulation Experiment Analysis
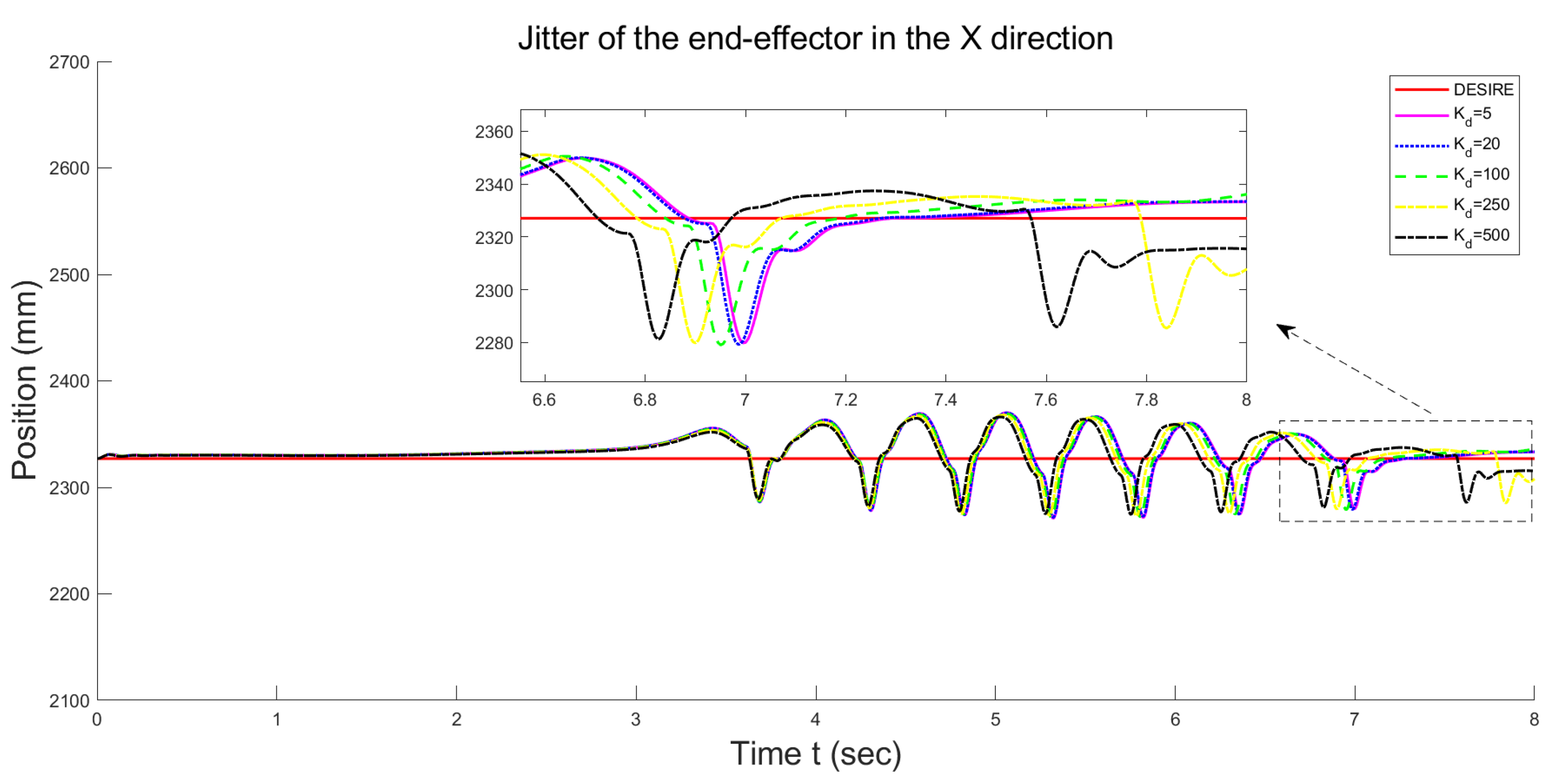
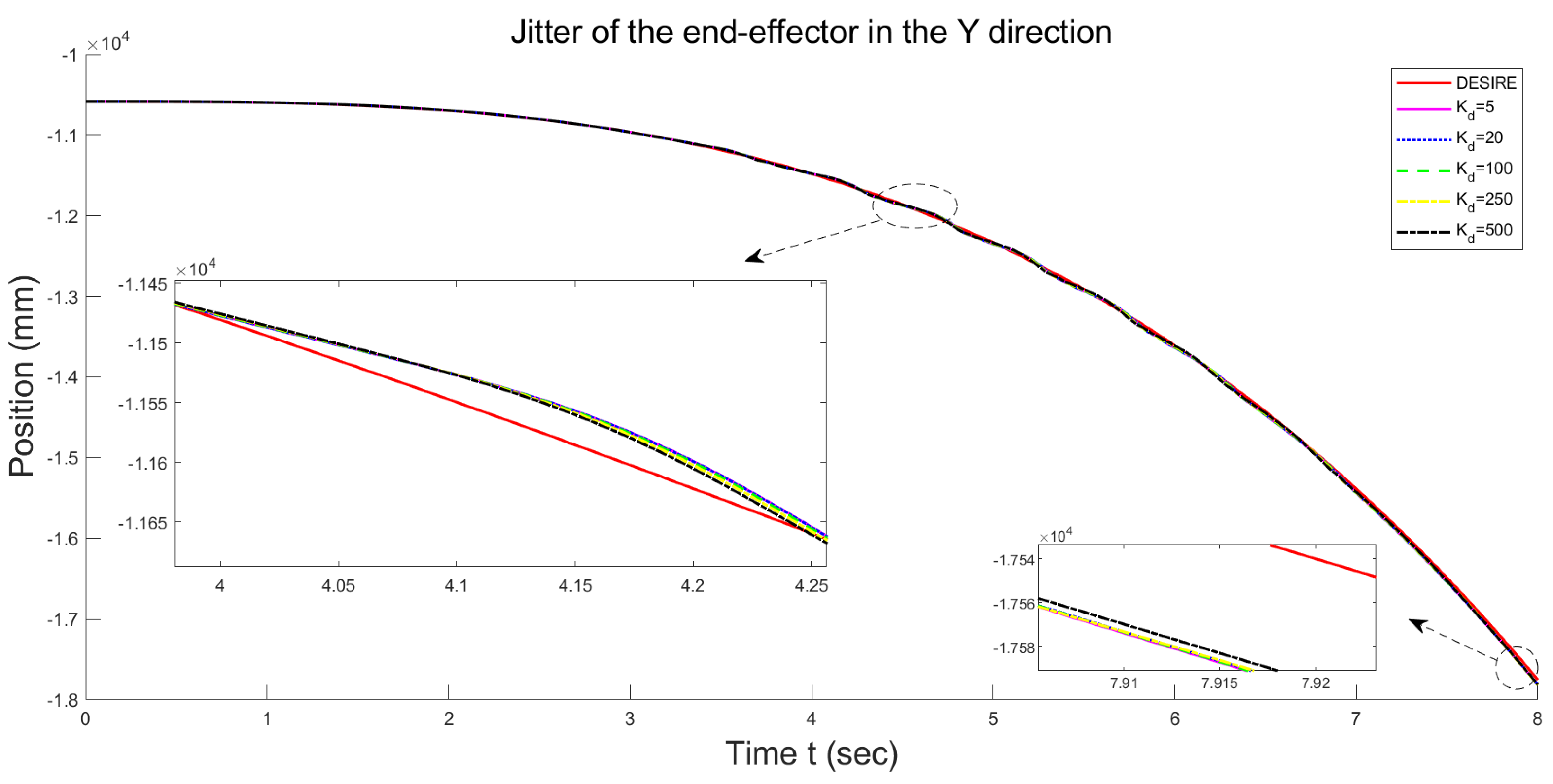
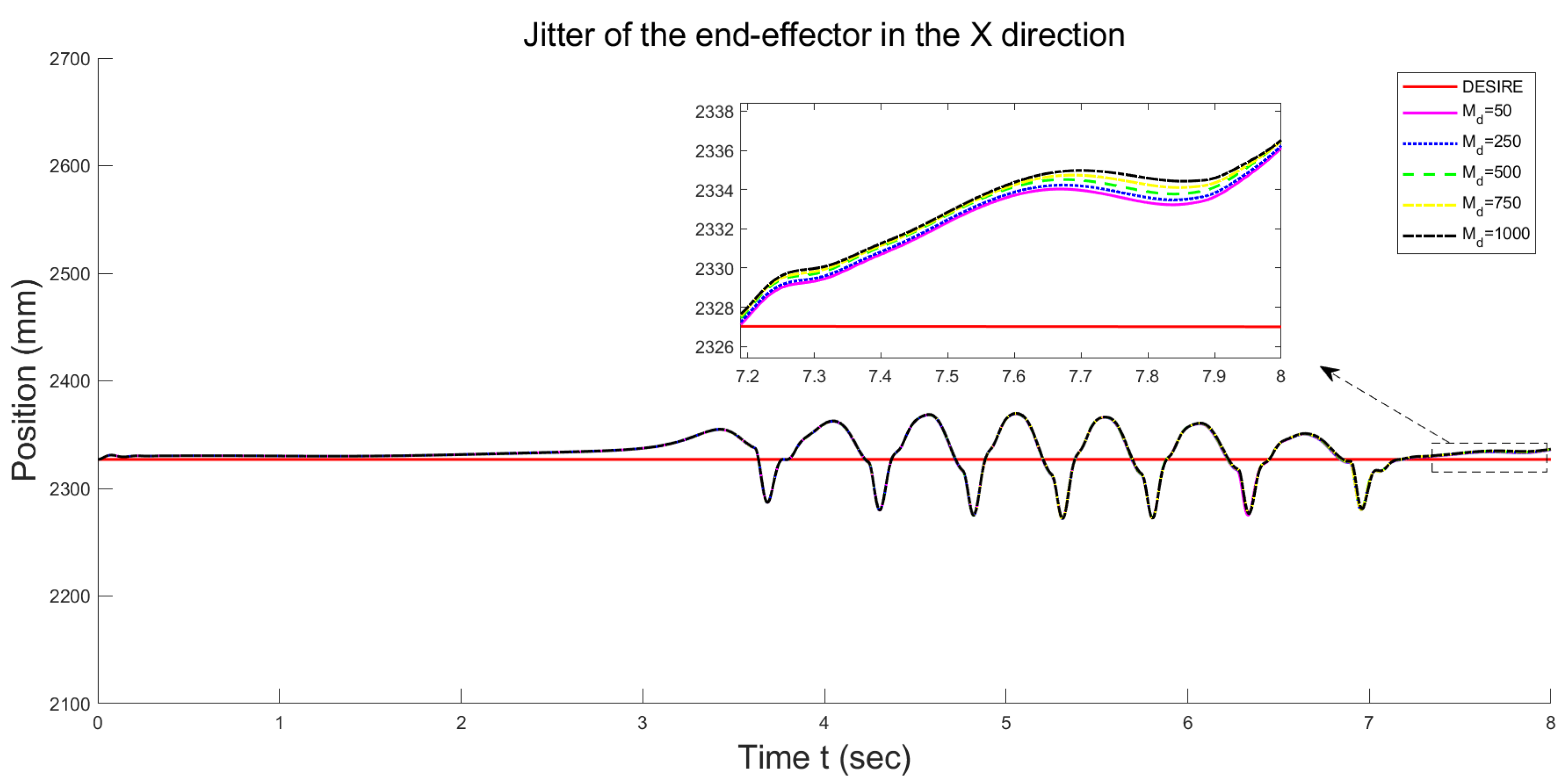
5.3.1. The Influence of Stiffness Matrix
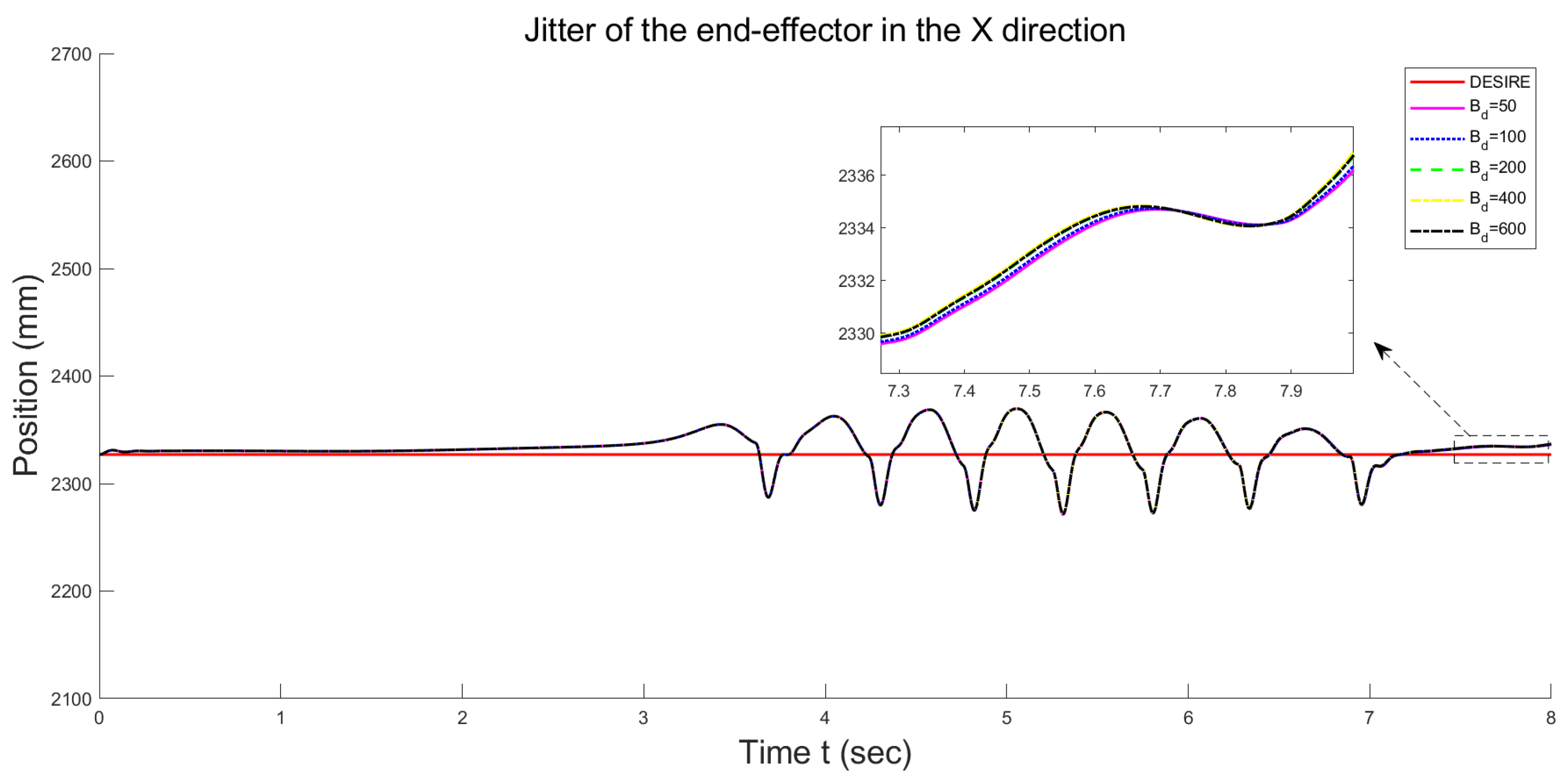
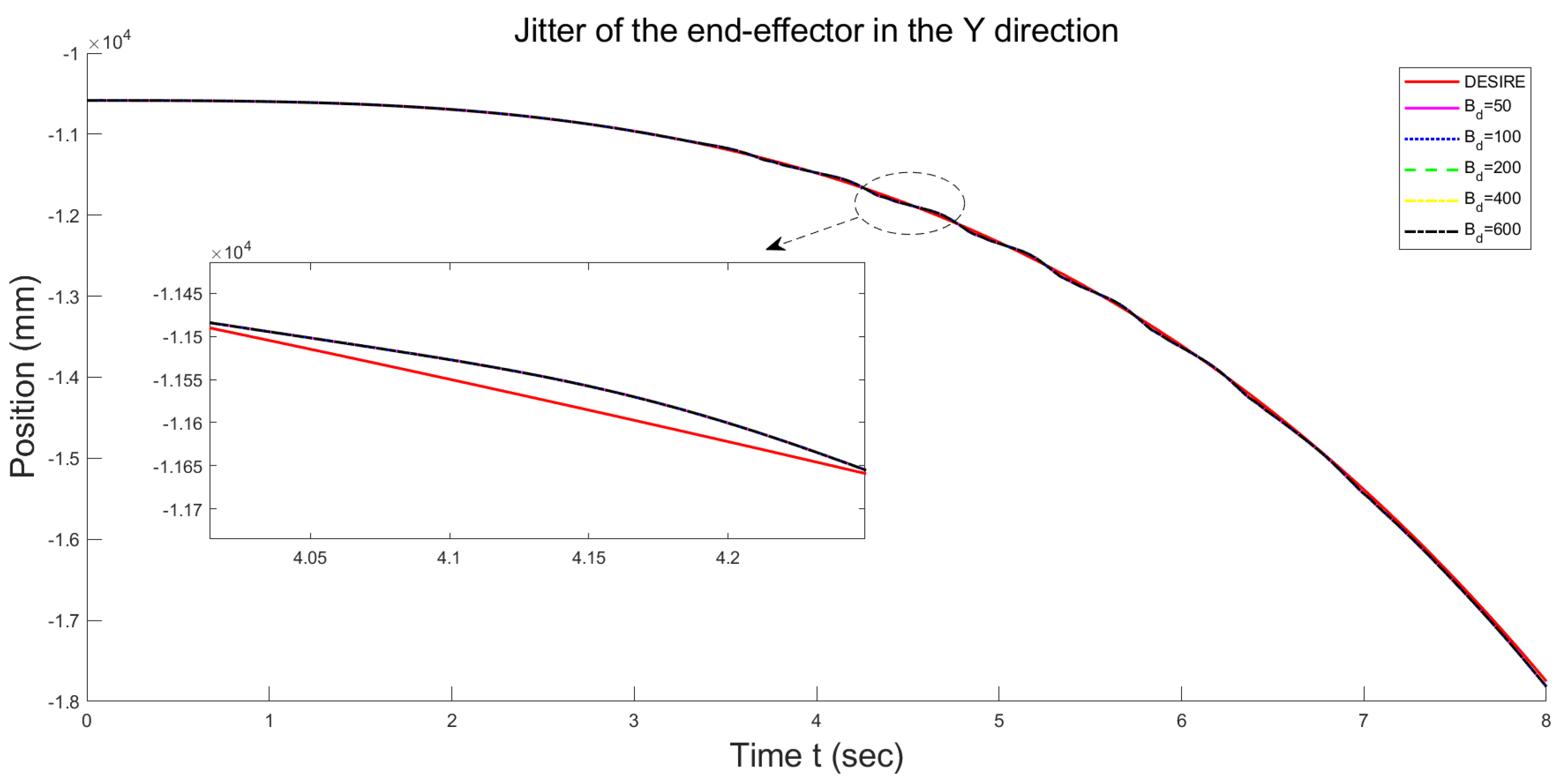
5.3.2. The Influence of STIFFNESS Matrix
5.3.3. The Influence of Stiffness Matrix
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pan, Z.; Fei, Y.; Ma, Z.; Zhang, M.; Liu, Y. Development Status and Trend of Palletizing Machine. Mech. Electr. Eng. Technol. 2022, 51, 88–91. [Google Scholar]
- Wang, X.; Wang, Y. Positioning and Vibration Control of Robot Manipulator Based on Hybrid Control. Light Ind. Mach. 2017, 35, 45–48. [Google Scholar]
- Guo, Y.; Xu, S.; Li, H.; Wang, Z.; Hao, Q. Finite-time tracking control of oscillatory-based manipulators bansed on an improved sliding mode reaching law. J. Vib. Shock 2022, 41, 86–92+194. [Google Scholar] [CrossRef]
- Yuan, M.; Wang, L.; Chen, W.; Qiu, B.; Xu, Y. Vibration suppression for gorging robots based on inpit shaping and sliding mold. Comput. Integr. Manuf. Syst. 2022, 28, 102–111. [Google Scholar] [CrossRef]
- Huang, H.; Tang, G.; Chen, H.; Han, L.; Xie, D. Dynamic Modeling and Vibration Suppression for Two-Link Underwater Flexible Manipulators. IEEE Access 2022, 10, 40181–40196. [Google Scholar] [CrossRef]
- Gu, J.; Xue, X.; Yang, W.; Lu, G. A hybrid sliding mode controller design for vibration suppression in a hydraulic suspension system with vertical load disturbance. J. Vib. Control 2022, 11, 107754632211473. [Google Scholar] [CrossRef]
- Suksabai, N.; Chuckpaiwong, I. Input-Shaped Model Reference Control Using Sliding Mode Design for Sway Suppression of An Industrial Overhead Crane. Eng.-J.-Thail. 2023, 27, 1–15. [Google Scholar] [CrossRef]
- Hsiao, C.Y.; Wang, Y.H. Evaluation of Ride Comfort for Active Suspension System Based on Self-tuning Fuzzy Sliding Mode Control. Int. J. Control Autom. Syst. 2022, 20, 1131–1141. [Google Scholar] [CrossRef]
- Qiu, Z.C.; Chen, S.W. Vibration control of a translational coupled double flexible beam system using sliding mode neural network fuzzy control. Trans. Inst. Meas. Control 2022, 44, 2264–2288. [Google Scholar] [CrossRef]
- Liu, Z.; Wei, W.; Liu, X.; Han, S. Target Tracking of Snake Robot with Double-Sine Serpentine Gait Based on Adaptive Sliding Mode Control. Actuators 2023, 12, 38. [Google Scholar] [CrossRef]
- Xu, Y.; Wang, X.; Wang, L.; Wang, K.; Ma, L. Learning Control for Flexible Manipulators with Varying Loads: A Composite Method with Robust Adaptive Dynamic Programming and Robust Sliding Mode Control. Electronics 2022, 11, 956. [Google Scholar] [CrossRef]
- Xie, L.; Yu, X.; Chen, L. Robust fuzzy sliding mode control and vibration suppression of free-floating flexible-link and flexible-joints space manipulator with external interference and uncertain parameter. Robotica 2022, 40, 997–1019. [Google Scholar] [CrossRef]
- Hoang, Q.D.; Woo, S.H.; Lee, S.G.; Le, A.T.; Pham, D.T.; Mai, T.V.; Nguyen, V.T. Robust control with a novel 6-DOF dynamic model of indoor bridge crane for suppressing vertical vibration. J. Braz. Soc. Mech. Sci. Eng. 2022, 44, 169. [Google Scholar] [CrossRef]
- Wang, T.C.; Du, W.W.; Zeng, L.S.; Su, L.; Zhao, Y.M.; Gu, F.; Liu, L.; Chi, Q. Design and Testing of an End-Effector for Tomato Picking. Agronomy 2023, 13, 947. [Google Scholar] [CrossRef]
- Lin, H. Structure Design and Optimization of Container Loading Robot. Master’s Thesis, Guangzhou University, Guangzhou, China, 2019. [Google Scholar]
- Xu, D.; Wang, Z.Y.; Li, H.; Wang, X.C.; Cao, Z.D. Research on Kinematics Analysis and Trajectory Planning of Loading Robot. In Proceedings of the 8th International Conference on Artificial Intelligence and Security (ICAIS), Qinghai, China, 22–26 July 2022; Volume 13338, pp. 500–512. [Google Scholar] [CrossRef]
- Dachang, Z.; Pengcheng, H.; Baolin, D.; Puchen, Z. Adaptive nonsingular terminal sliding mode control of robot manipulator based on contour error compensation. Sci. Rep. 2023, 13, 330. [Google Scholar] [CrossRef] [PubMed]
- Kondratev, S.; Meshcheryakov, V. Modeling of 2R Planar Dumbbell Stacker Robot Locomotion Using Force Control for Gripper Dexterous Manipulation. Computation 2022, 10, 143. [Google Scholar] [CrossRef]
- Haghshenas-Jaryani, M. Dynamics and Computed-Muscle-Force Control of a Planar Muscle-Driven Snake Robot. Actuators 2022, 11, 194. [Google Scholar] [CrossRef]
- Xu, Y.; Liu, R.; Liu, J.; Zhang, J. A novel constraint tracking control with sliding mode control for industrial robots. Int. J. Adv. Robot. Syst. 2021, 18, 17298814211029778. [Google Scholar] [CrossRef]
- Xu, B. Research on Trajectory Tracking Control of Manipulator Based on Non-Singular Terminal Sliding Mode. Master’s Thesis, Nanjing University of Information Science & Technology, Nanjing, China, 2022. [Google Scholar] [CrossRef]
- Wang, Y.; Lu, S.W.; Gao, S.; Ren, Y.L.; Zhang, R.J. A Study of the Vibration Characteristics of Flexible Mechanical Arms for Pipe String Transportation in Oilfields. Energies 2022, 15, 2030. [Google Scholar] [CrossRef]
- Li, N.; Hao, C. Sensorless Control for Permanent Magnet Synchronous Motor Based on Improved Sliding Mode Observer. Modul. Mach. Tool Autom. Manuf. Tech. 2023, 3, 82–85. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| i | [mm] | [mm] | ||
|---|---|---|---|---|
| 1 | 0 | 90 | ||
| 2 | 90 | 0 | ||
| 3 | 90 | 0 | 0 | |
| 4 | 90 | 0 | 0 | |
| 5 | 0 | 0 | ||
| 6 | 90 | 0 | 0 | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, W.; Qin, G.; Xiao, Z.; Wu, W.; Chen, C.; Yu, M.; Ren, Z.; Zhang, T.; Long, G. Adaptive End-Effector Buffeting Sliding Mode Control for Heavy-Duty Robots with Long Arms. Mathematics 2023, 11, 2977. https://doi.org/10.3390/math11132977
Wu W, Qin G, Xiao Z, Wu W, Chen C, Yu M, Ren Z, Zhang T, Long G. Adaptive End-Effector Buffeting Sliding Mode Control for Heavy-Duty Robots with Long Arms. Mathematics. 2023; 11(13):2977. https://doi.org/10.3390/math11132977
Chicago/Turabian StyleWu, Wenqiang, Guangxiang Qin, Zhongmin Xiao, Weicong Wu, Chaozheng Chen, Mingfeng Yu, Zhiye Ren, Tie Zhang, and Gaofeng Long. 2023. "Adaptive End-Effector Buffeting Sliding Mode Control for Heavy-Duty Robots with Long Arms" Mathematics 11, no. 13: 2977. https://doi.org/10.3390/math11132977
APA StyleWu, W., Qin, G., Xiao, Z., Wu, W., Chen, C., Yu, M., Ren, Z., Zhang, T., & Long, G. (2023). Adaptive End-Effector Buffeting Sliding Mode Control for Heavy-Duty Robots with Long Arms. Mathematics, 11(13), 2977. https://doi.org/10.3390/math11132977