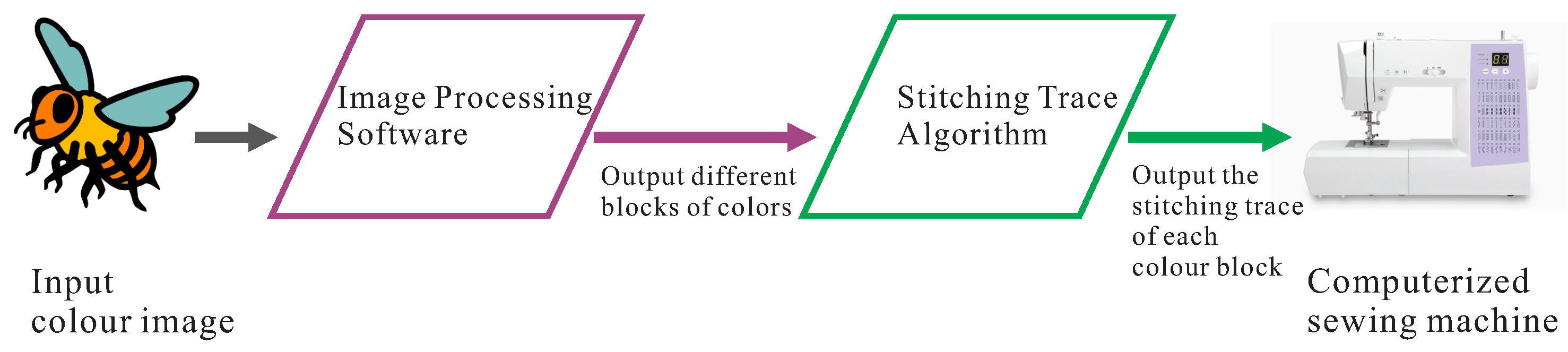
Figure 1.
The primary elements and operational sequence of a computerized embroidery procedure.
Figure 1.
The primary elements and operational sequence of a computerized embroidery procedure.
Figure 2.
(a) A collection of lattices and (b) the associated supergrid graph of (a), in which each lattice is represented as a vertex with integer coordinates.
Figure 2.
(a) A collection of lattices and (b) the associated supergrid graph of (a), in which each lattice is represented as a vertex with integer coordinates.
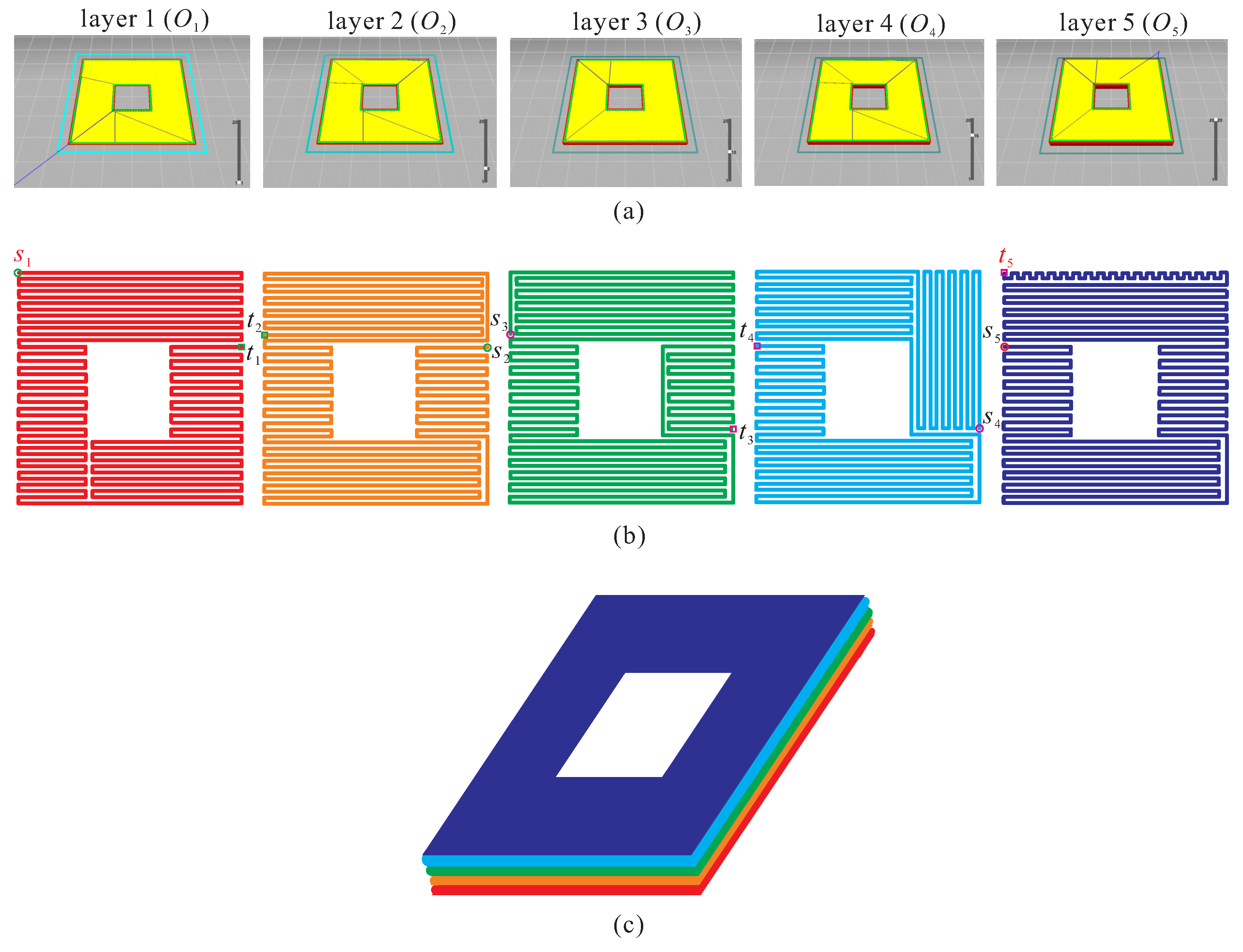
Figure 3.
(a) The five layers (–) of a 3D printing model for an O-type object, (b) the computation of the Hamiltonian -path for each layer shown in (a), and (c) the final result after completing the 5-layered 3D printing process.
Figure 3.
(a) The five layers (–) of a 3D printing model for an O-type object, (b) the computation of the Hamiltonian -path for each layer shown in (a), and (c) the final result after completing the 5-layered 3D printing process.
Figure 4.
The structures of three types of supergrid graphs: (a) L-shaped supergrid graph , (b) C-shaped supergrid graph , and (c) O-shaped supergrid graph .
Figure 4.
The structures of three types of supergrid graphs: (a) L-shaped supergrid graph , (b) C-shaped supergrid graph , and (c) O-shaped supergrid graph .
Figure 5.
Rectangular supergrid graphs in which there is no Hamiltonian -path for (a) and (b) , where solid lines indicate the longest path between s and t.
Figure 5.
Rectangular supergrid graphs in which there is no Hamiltonian -path for (a) and (b) , where solid lines indicate the longest path between s and t.
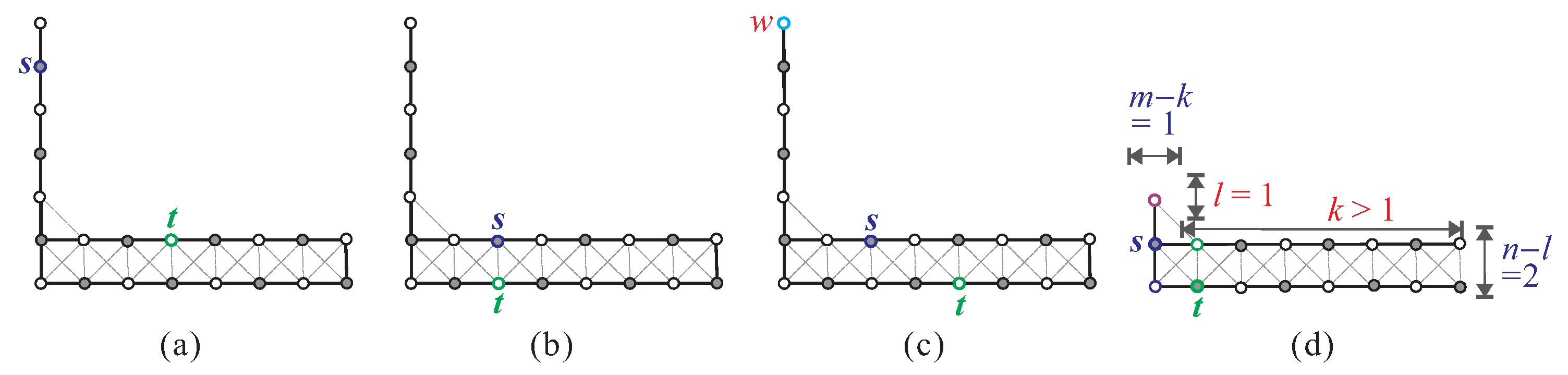
Figure 6.
L-shaped supergrid graph does not contain a Hamiltonian -path when one of the following conditions are satisfied: (a) s is a cut vertex; (b) is a vertex cut; (c) there exists a vertex w such that , , and ; (d) , , , , and .
Figure 6.
L-shaped supergrid graph does not contain a Hamiltonian -path when one of the following conditions are satisfied: (a) s is a cut vertex; (b) is a vertex cut; (c) there exists a vertex w such that , , and ; (d) , , , , and .
Figure 7.
C-shaped supergrid graphs in which there is no Hamiltonian -path, when one of the following conditions are satisfied: (a) s is a cut vertex; (b) is a vertex cut; (c) there exists a vertex w such that , , and ; (d) , , , and ; (e–g) condition (F5) holds; (h) and .
Figure 7.
C-shaped supergrid graphs in which there is no Hamiltonian -path, when one of the following conditions are satisfied: (a) s is a cut vertex; (b) is a vertex cut; (c) there exists a vertex w such that , , and ; (d) , , , and ; (e–g) condition (F5) holds; (h) and .
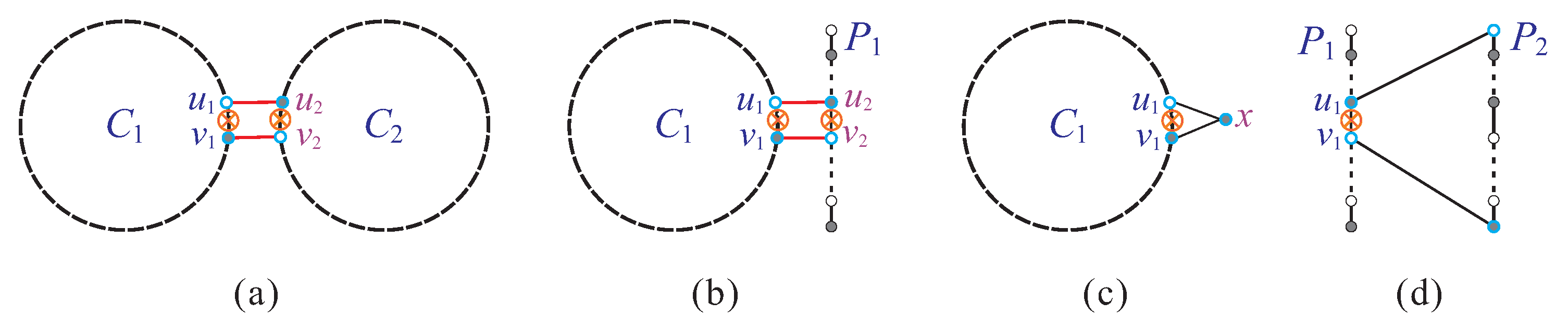
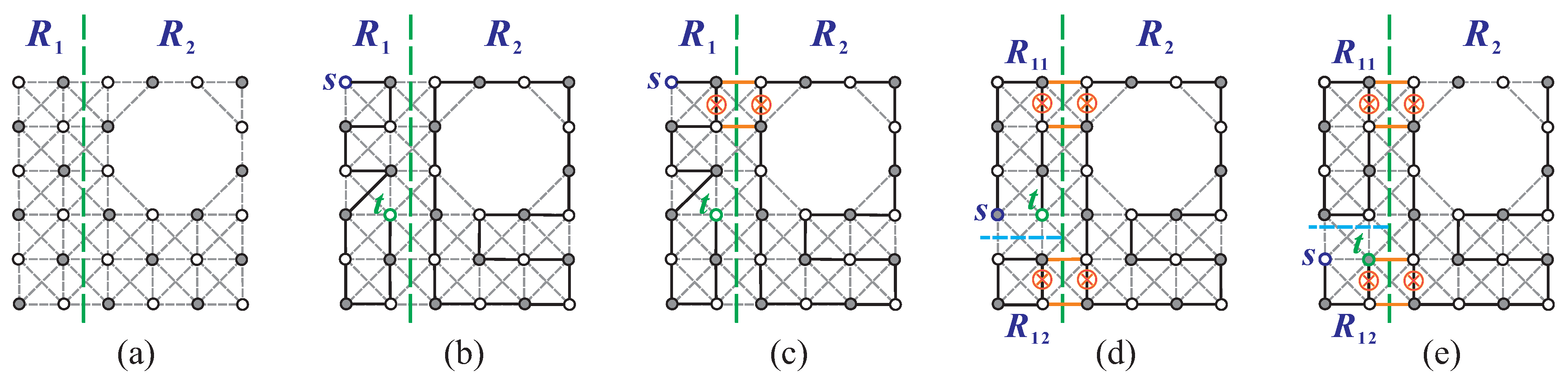
Figure 8.
Schematic diagrams of (a) Statement (1), (b) Statement (2), (c) Statement (3), and (d) Statement (4) of Proposition 1, where the cycles or paths are denoted by bold dashed lines, and the symbol ⊗ is used to signify the removal of an edge during their construction.
Figure 8.
Schematic diagrams of (a) Statement (1), (b) Statement (2), (c) Statement (3), and (d) Statement (4) of Proposition 1, where the cycles or paths are denoted by bold dashed lines, and the symbol ⊗ is used to signify the removal of an edge during their construction.
Figure 9.
The subcases for and : (a) , (b) and , (c) and , and (d) .
Figure 9.
The subcases for and : (a) , (b) and , (c) and , and (d) .
Figure 10.
(a) One vertical separation on to obtain and , and (b) the constructed Hamiltonian cycle of , with solid bold lines indicating the cycle.
Figure 10.
(a) One vertical separation on to obtain and , and (b) the constructed Hamiltonian cycle of , with solid bold lines indicating the cycle.
Figure 11.
does not exist when (a,b) is a vertex cut; (c,d) ; and (e) , , and .
Figure 11.
does not exist when (a,b) is a vertex cut; (c,d) ; and (e) , , and .
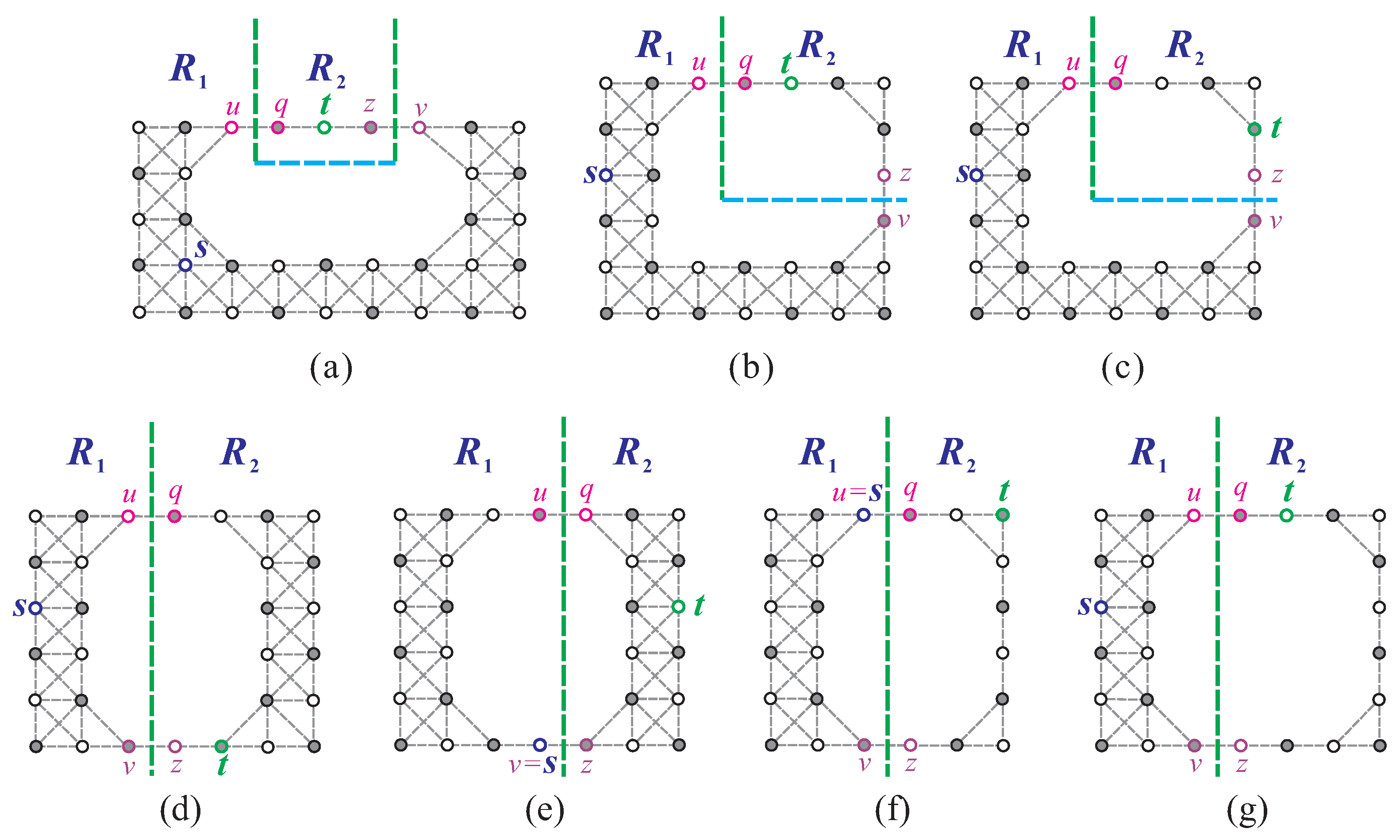
Figure 12.
For O-shaped supergrid graphs with and , the forbidden conditions for the existence of a Hamiltonian -path are as follows: (a) when , , , and ; (b) when , , , and ; and (c,d) when , , , , and .
Figure 12.
For O-shaped supergrid graphs with and , the forbidden conditions for the existence of a Hamiltonian -path are as follows: (a) when , , , and ; (b) when , , , and ; and (c,d) when , , , , and .
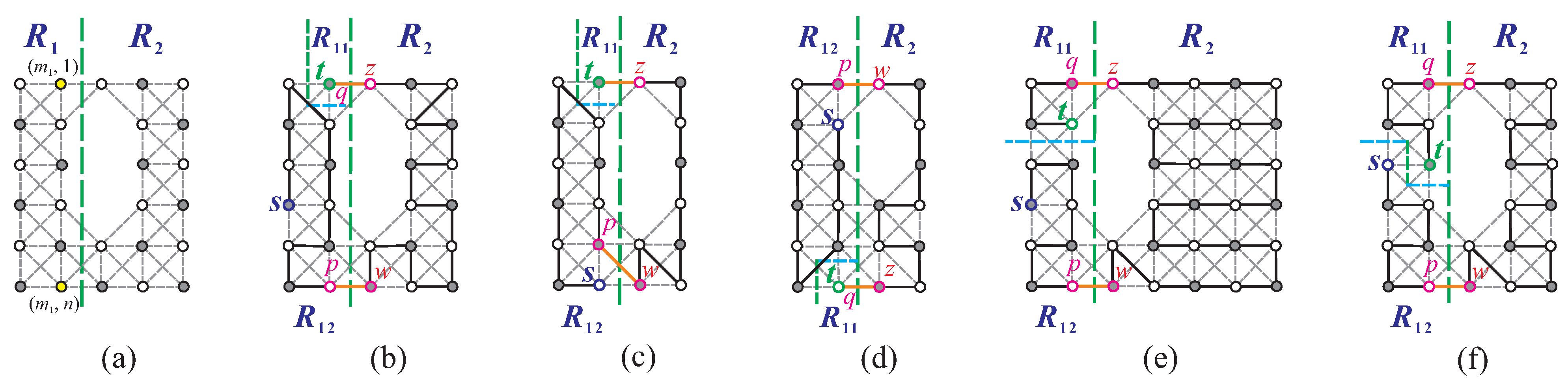
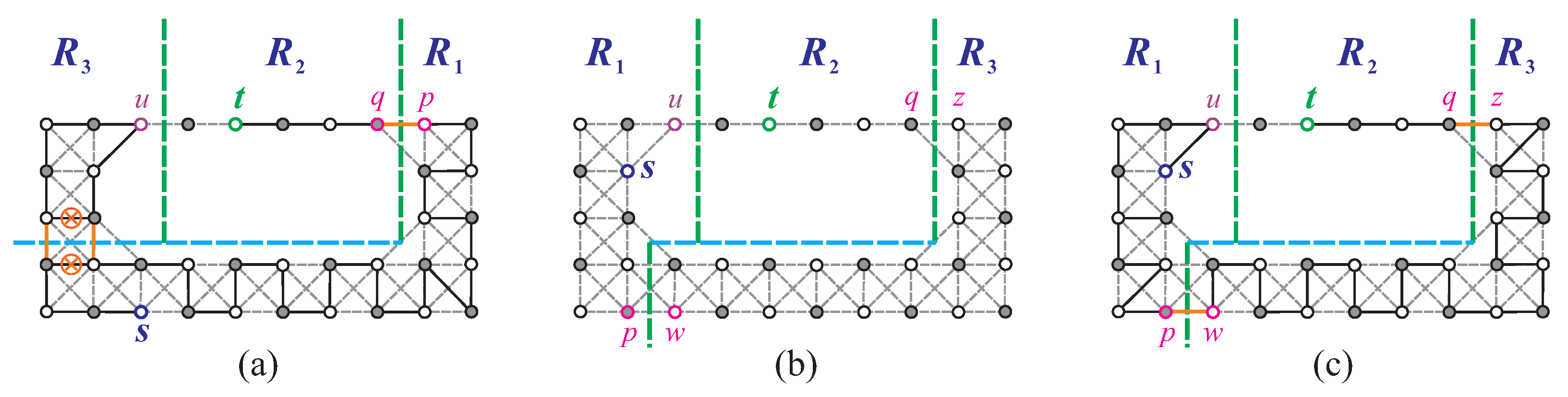
Figure 13.
O-shaped supergrid graphs with and , in which there is no Hamiltonian -path, where (a) case (1.2) of condition (F13) is satisfied, (b,c) case (1.3) of condition (F13) is satisfied, (d–f) case (2) of condition (F13) is satisfied, and (g,h) case (3) of condition (F13) is satisfied.
Figure 13.
O-shaped supergrid graphs with and , in which there is no Hamiltonian -path, where (a) case (1.2) of condition (F13) is satisfied, (b,c) case (1.3) of condition (F13) is satisfied, (d–f) case (2) of condition (F13) is satisfied, and (g,h) case (3) of condition (F13) is satisfied.
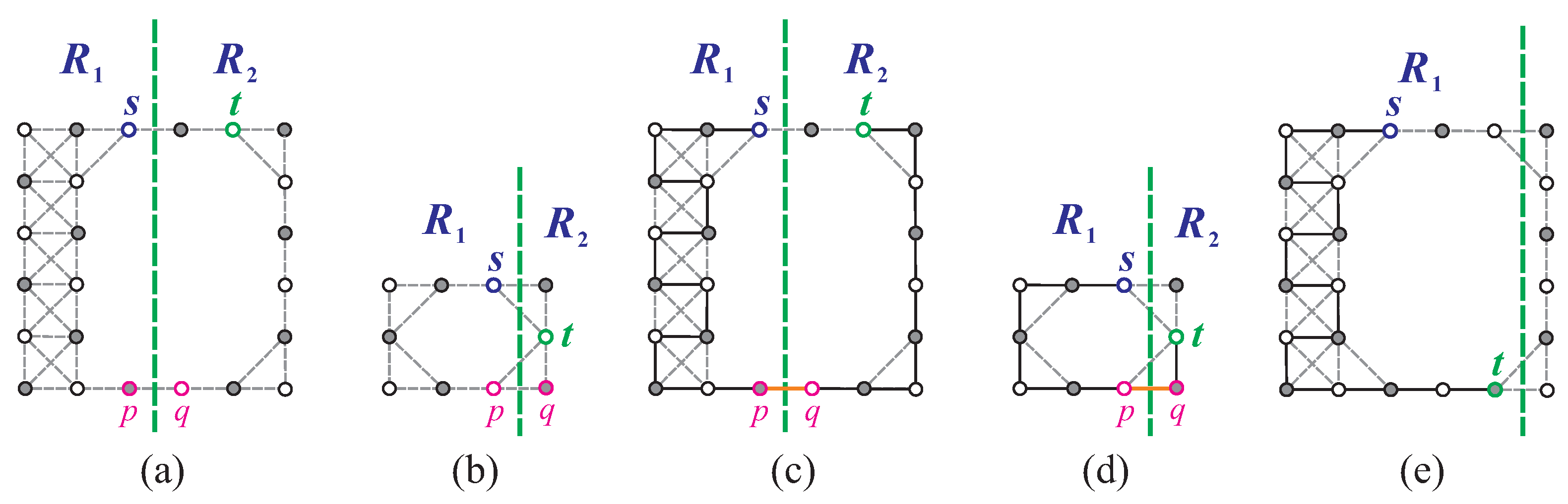
Figure 14.
(a) A vertical separation on is performed with the constraints that , and ; (b,c) a horizontal separation is performed on , where (b) assumes that s and t are adjacent and (c) assumes that s and t are non-adjacent; (d) Hamiltonian paths are constructed for , , and ; and (e) a Hamiltonian -path is constructed in , with bold lines representing the constructed path.
Figure 14.
(a) A vertical separation on is performed with the constraints that , and ; (b,c) a horizontal separation is performed on , where (b) assumes that s and t are adjacent and (c) assumes that s and t are non-adjacent; (d) Hamiltonian paths are constructed for , , and ; and (e) a Hamiltonian -path is constructed in , with bold lines representing the constructed path.
Figure 15.
(a) A vertical separation on , where , , and , is performed to obtain and . (b–d,f) Vertical and horizontal separations on are performed. (e) A horizontal separation on is performed. Note that bold lines represent the constructed Hamiltonian path.
Figure 15.
(a) A vertical separation on , where , , and , is performed to obtain and . (b–d,f) Vertical and horizontal separations on are performed. (e) A horizontal separation on is performed. Note that bold lines represent the constructed Hamiltonian path.
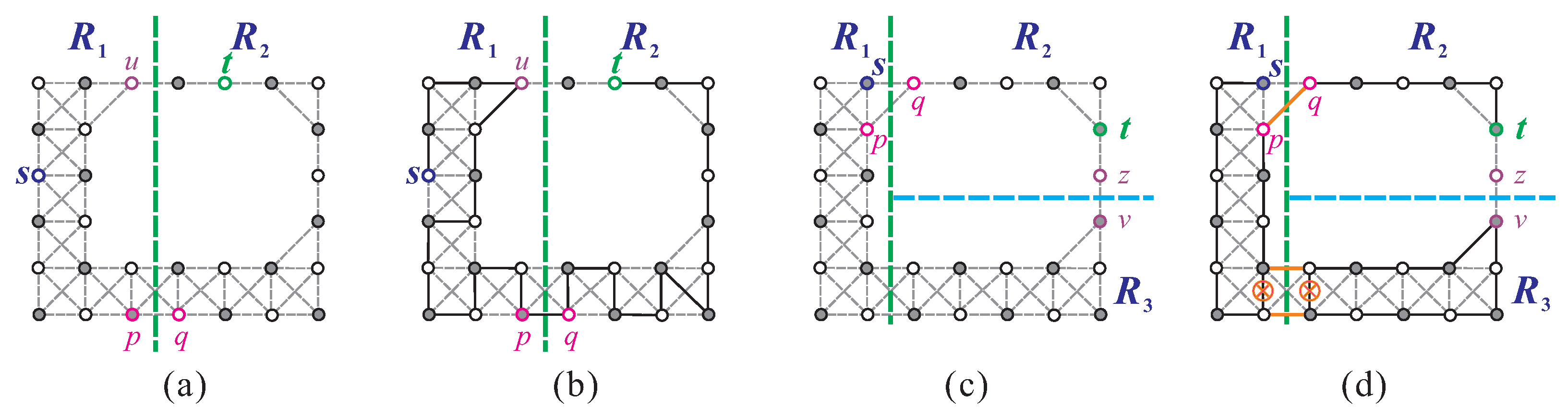
Figure 16.
(a) A vertical separation on , where and ; (b) a Hamiltonian -path in and a Hamiltonian cycle in ; (c) a Hamiltonian -path in , where is not a vertex cut of ; (d,e) horizontal separation on and Hamiltonian -paths of , where is a vertex cut of and where in (b–e), s and t are in , the constructed Hamiltonian -path is indicated by bold lines, and ⊗ denotes the destruction of an edge during the construction of the Hamiltonian path.
Figure 16.
(a) A vertical separation on , where and ; (b) a Hamiltonian -path in and a Hamiltonian cycle in ; (c) a Hamiltonian -path in , where is not a vertex cut of ; (d,e) horizontal separation on and Hamiltonian -paths of , where is a vertex cut of and where in (b–e), s and t are in , the constructed Hamiltonian -path is indicated by bold lines, and ⊗ denotes the destruction of an edge during the construction of the Hamiltonian path.
Figure 17.
A Hamiltonian -path of , where and , for (a–c) ; and (d) and .
Figure 17.
A Hamiltonian -path of , where and , for (a–c) ; and (d) and .
Figure 18.
(a,b) A vertical separation on for , , and ; (c) a Hamiltonian -path in and a Hamiltonian -path in for (a); (d) a Hamiltonian -path in for (a); and (e) a vertical separation on and a Hamiltonian -path in for , , and , where bold lines indicate the constructed Hamiltonian path.
Figure 18.
(a,b) A vertical separation on for , , and ; (c) a Hamiltonian -path in and a Hamiltonian -path in for (a); (d) a Hamiltonian -path in for (a); and (e) a vertical separation on and a Hamiltonian -path in for , , and , where bold lines indicate the constructed Hamiltonian path.
Figure 19.
(a) Two vertical separations and one horizontal separation on for , , and ; (b) a vertical separation on for , , and ; (c) a Hamiltonian -path in and a Hamiltonian cycle in for (b); and (d) a Hamiltonian -path in for (b), where bold lines represent the constructed Hamiltonian path and ⊗ indicates the destruction of an edge while constructing such a Hamiltonian -path.
Figure 19.
(a) Two vertical separations and one horizontal separation on for , , and ; (b) a vertical separation on for , , and ; (c) a Hamiltonian -path in and a Hamiltonian cycle in for (b); and (d) a Hamiltonian -path in for (b), where bold lines represent the constructed Hamiltonian path and ⊗ indicates the destruction of an edge while constructing such a Hamiltonian -path.
Figure 20.
(a,b) A vertical separation on for , , , and ; (c,d) vertical and horizontal separations on for , , , , and ; (e) a Hamiltonian -path in and a Hamiltonian cycle in for (c); and (f) a Hamiltonian -path in for (c).
Figure 20.
(a,b) A vertical separation on for , , , and ; (c,d) vertical and horizontal separations on for , , , , and ; (e) a Hamiltonian -path in and a Hamiltonian cycle in for (c); and (f) a Hamiltonian -path in for (c).
Figure 21.
(a–c) Vertical and horizontal separations on for , , and or ; (d,e) a vertical separation on for and ; and (f) a vertical separation on for , , , and .
Figure 21.
(a–c) Vertical and horizontal separations on for , , and or ; (d,e) a vertical separation on for and ; and (f) a vertical separation on for , , , and .
Figure 22.
The upper bound of the length of the longest -path, where is a vertex cut, when (a) (O1) holds, (b) (O2) holds, and (c,d) (O3) holds. Note that a vertical separation in is denoted by a bold dashed line.
Figure 22.
The upper bound of the length of the longest -path, where is a vertex cut, when (a) (O1) holds, (b) (O2) holds, and (c,d) (O3) holds. Note that a vertical separation in is denoted by a bold dashed line.
Figure 23.
The upper bound of the length of the longest -path in for (a) condition (F11); (b) case (2.1) of condition (F13); (c) cases (2.2) and (2.3) of condition (F13); (d,e) condition (F11); and (f,g) cases (1.1), (1.2), and (3) of condition (F13), where the bold dash line indicates vertical or horizontal separation on .
Figure 23.
The upper bound of the length of the longest -path in for (a) condition (F11); (b) case (2.1) of condition (F13); (c) cases (2.2) and (2.3) of condition (F13); (d,e) condition (F11); and (f,g) cases (1.1), (1.2), and (3) of condition (F13), where the bold dash line indicates vertical or horizontal separation on .
Figure 24.
The upper bound of the length of the longest -path in for condition (O4), where (a,b) , , and ; and (c) , , and .
Figure 24.
The upper bound of the length of the longest -path in for condition (O4), where (a,b) , , and ; and (c) , , and .
Figure 25.
(a,b) Vertical separation on for conditions (O1) and (O2) respectively; (c,d) the longest -path in for (a,b), respectively; and (e) the longest -path in for (O3), where bold lines indicate the constructed longest -path.
Figure 25.
(a,b) Vertical separation on for conditions (O1) and (O2) respectively; (c,d) the longest -path in for (a,b), respectively; and (e) the longest -path in for (O3), where bold lines indicate the constructed longest -path.
Figure 26.
(a) Two vertical separations and one horizontal separation on for (F11), where ; (b) the longest -path in and a Hamiltonian cycle of ; and (c) the longest -path in for (a), where bold lines indicate the constructed longest -path and ⊗ represents the destruction of an edge while constructing such an -path.
Figure 26.
(a) Two vertical separations and one horizontal separation on for (F11), where ; (b) the longest -path in and a Hamiltonian cycle of ; and (c) the longest -path in for (a), where bold lines indicate the constructed longest -path and ⊗ represents the destruction of an edge while constructing such an -path.
Figure 27.
(a) The longest -path in for condition (F11), where and ; (b) three vertical separations and one horizontal separation on for (F11), where and ; and (c) the longest -path in for (b).
Figure 27.
(a) The longest -path in for condition (F11), where and ; (b) three vertical separations and one horizontal separation on for (F11), where and ; and (c) the longest -path in for (b).
Figure 28.
(a) A vertical separation on for case (2) of condition (F13), where ; (b) the longest -path in for (a); (c) a vertical separation and horizontal separations on for case (2) of condition (F13), where ; and (d) the longest -path in for (c).
Figure 28.
(a) A vertical separation on for case (2) of condition (F13), where ; (b) the longest -path in for (a); (c) a vertical separation and horizontal separations on for case (2) of condition (F13), where ; and (d) the longest -path in for (c).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}



























