
Sliding Mode Controller Based on the Extended State Observer for Plant-Protection Quadrotor Unmanned Aerial Vehicles


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Quadrotor UAV Dynamics Model
2.1. Establishing the Coordinate System
2.2. Quadrotor Dynamic Modeling
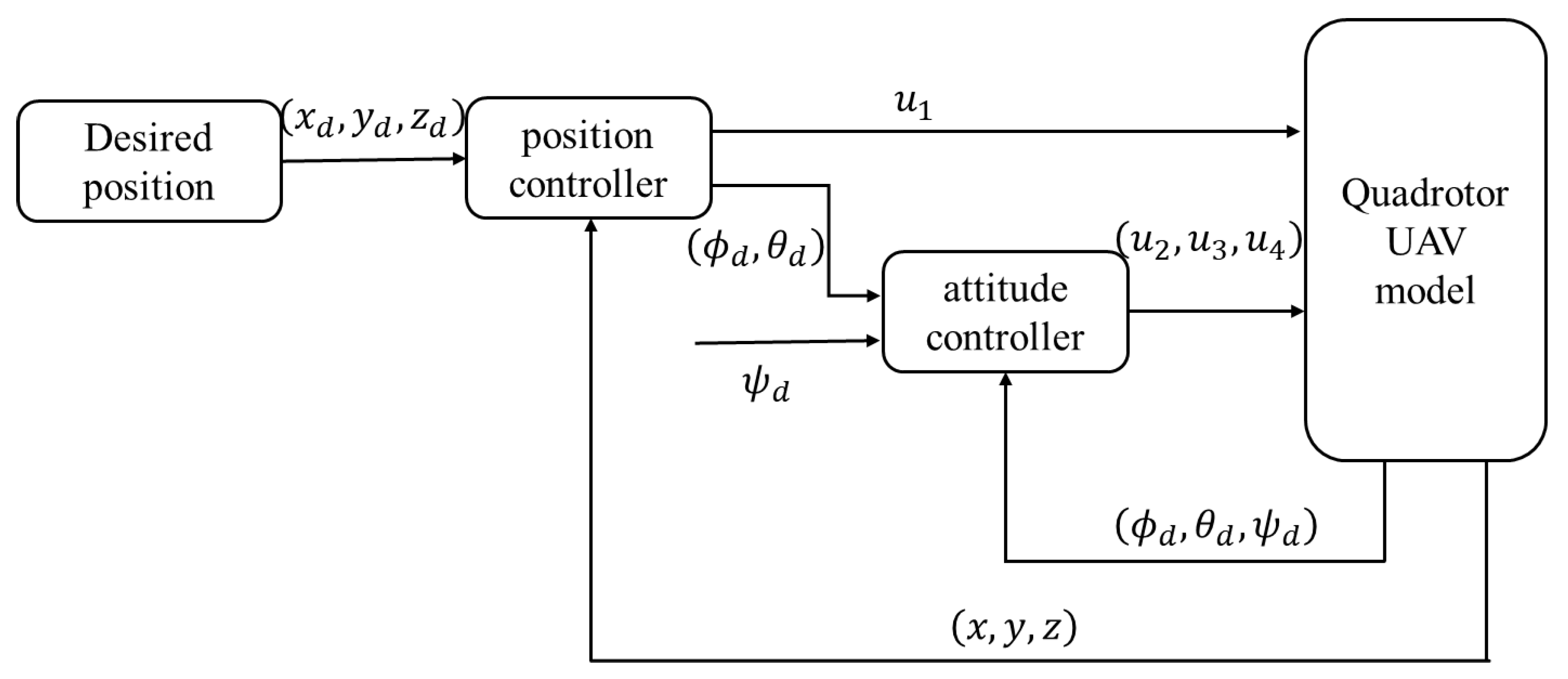
3. SMC Design
3.1. Design of the Position SMC
- (1)
- if and only if ;
- (2)
- if and only if ;
- (3)
- when ;
3.2. Design of the Attitude SMC
3.3. Simulation Analysis
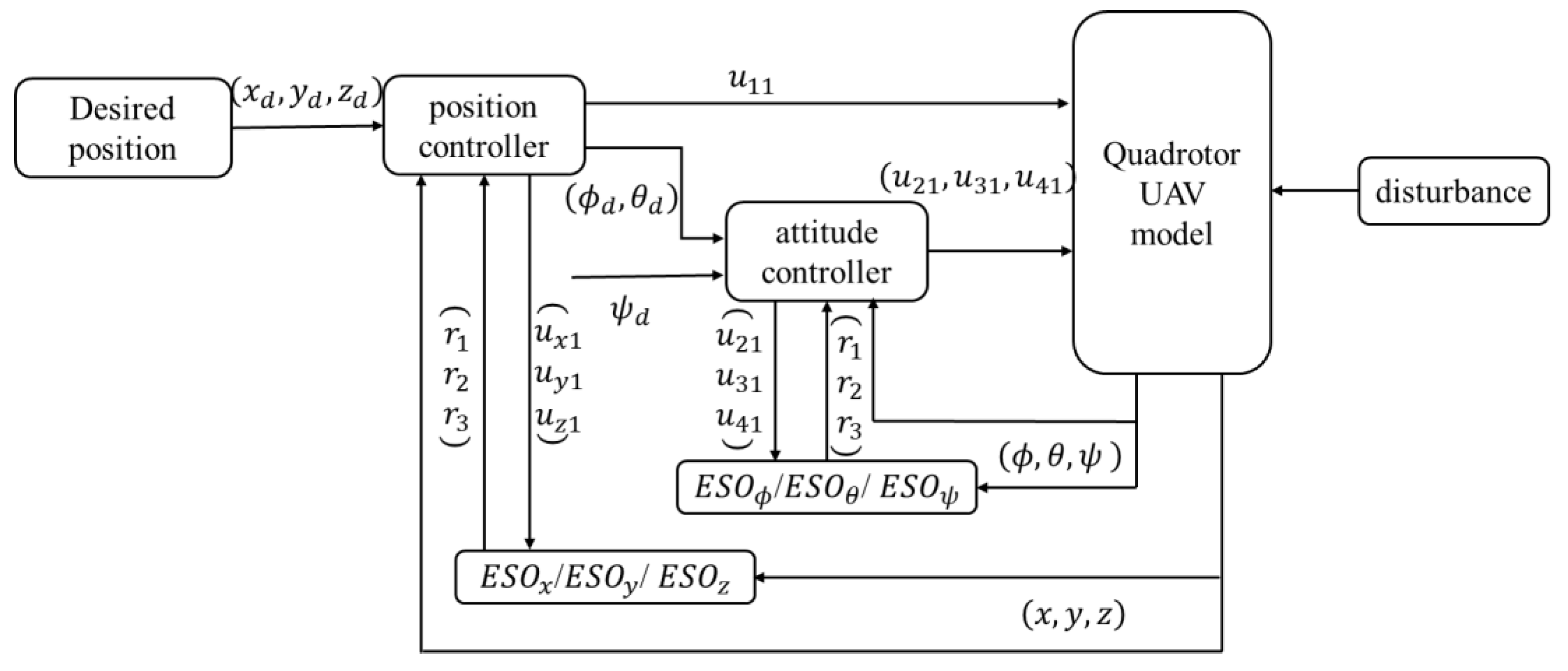
4. Design of SMC Based on ESO
4.1. Position Controller Design
4.2. Attitude Controller Design
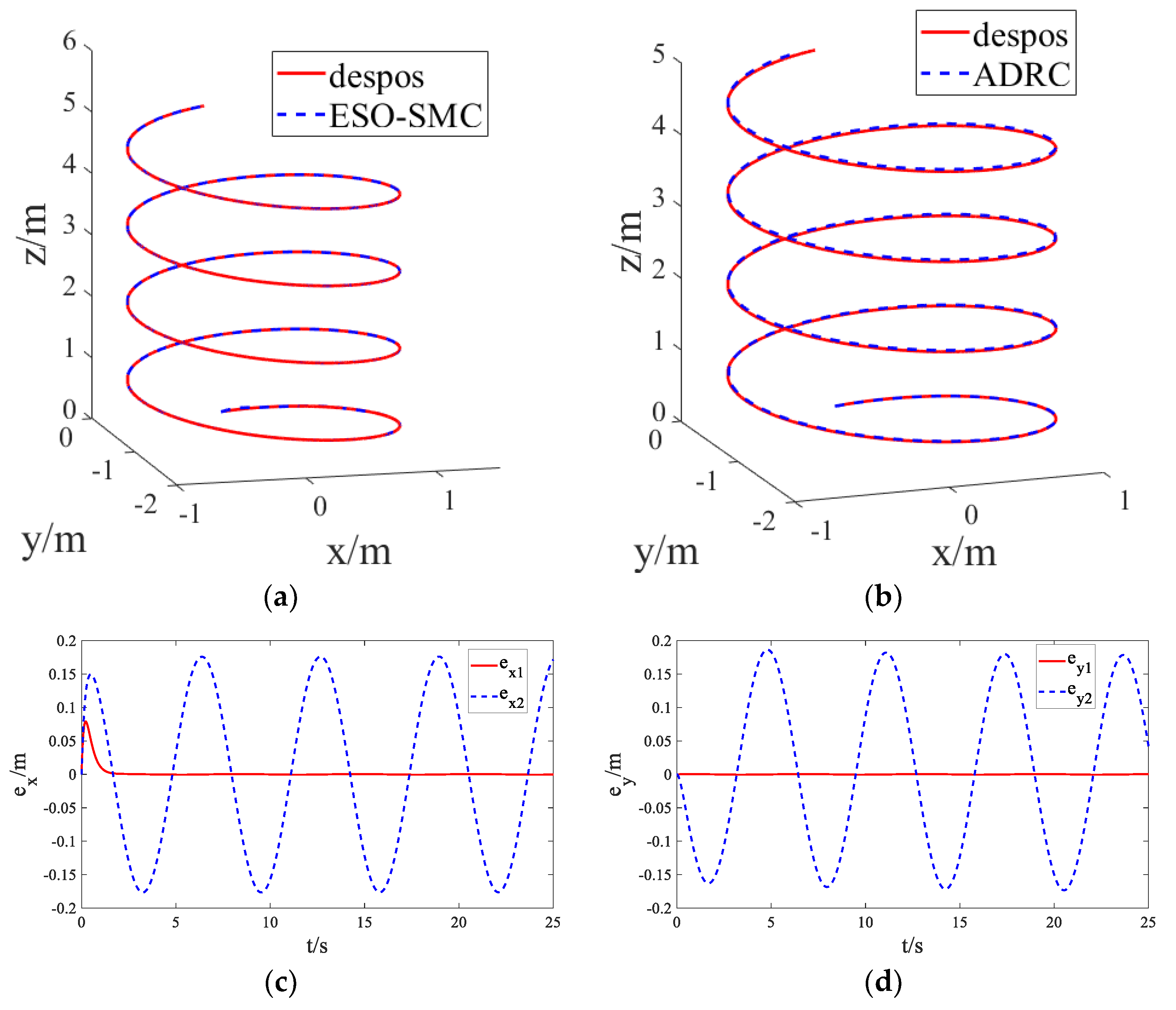
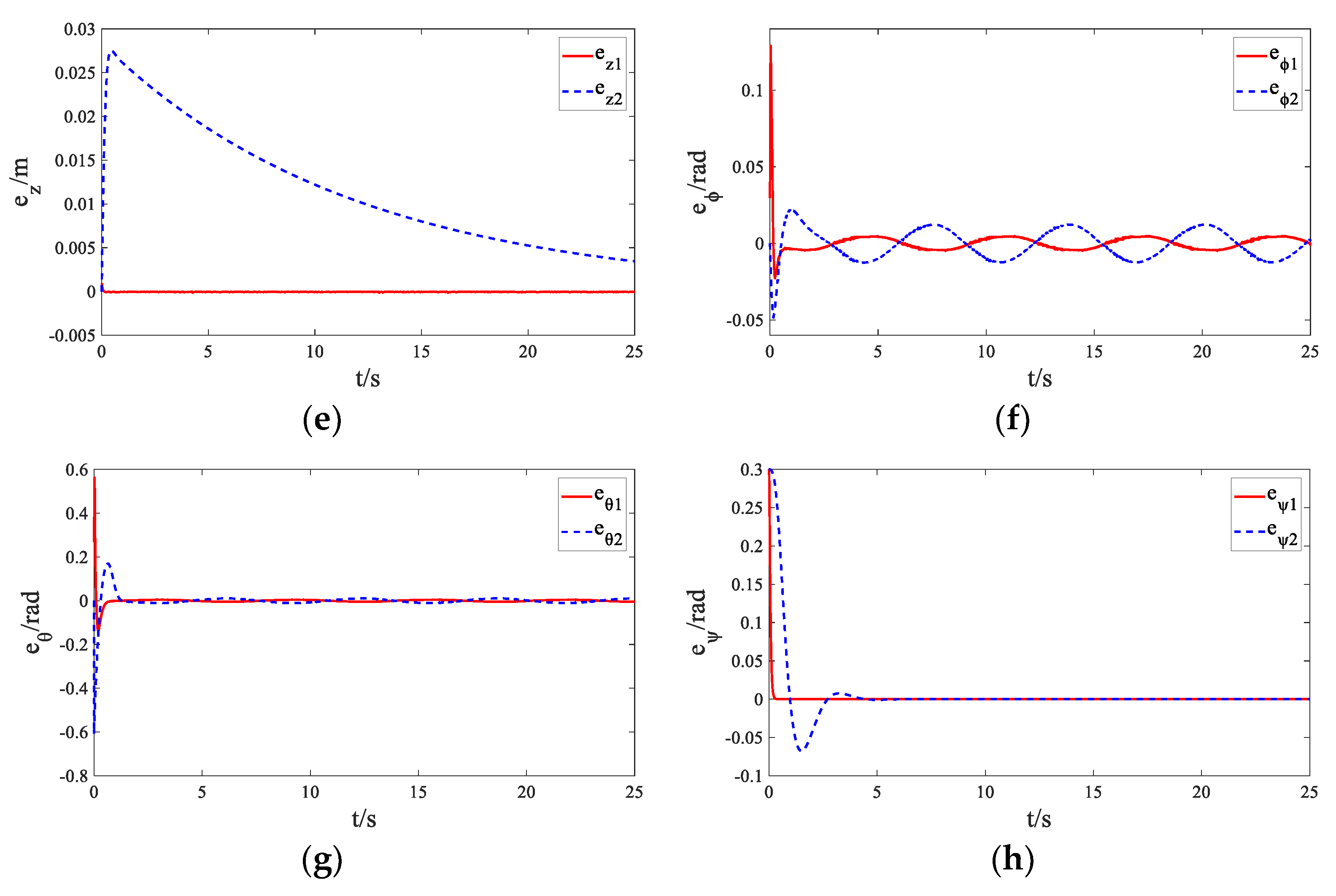
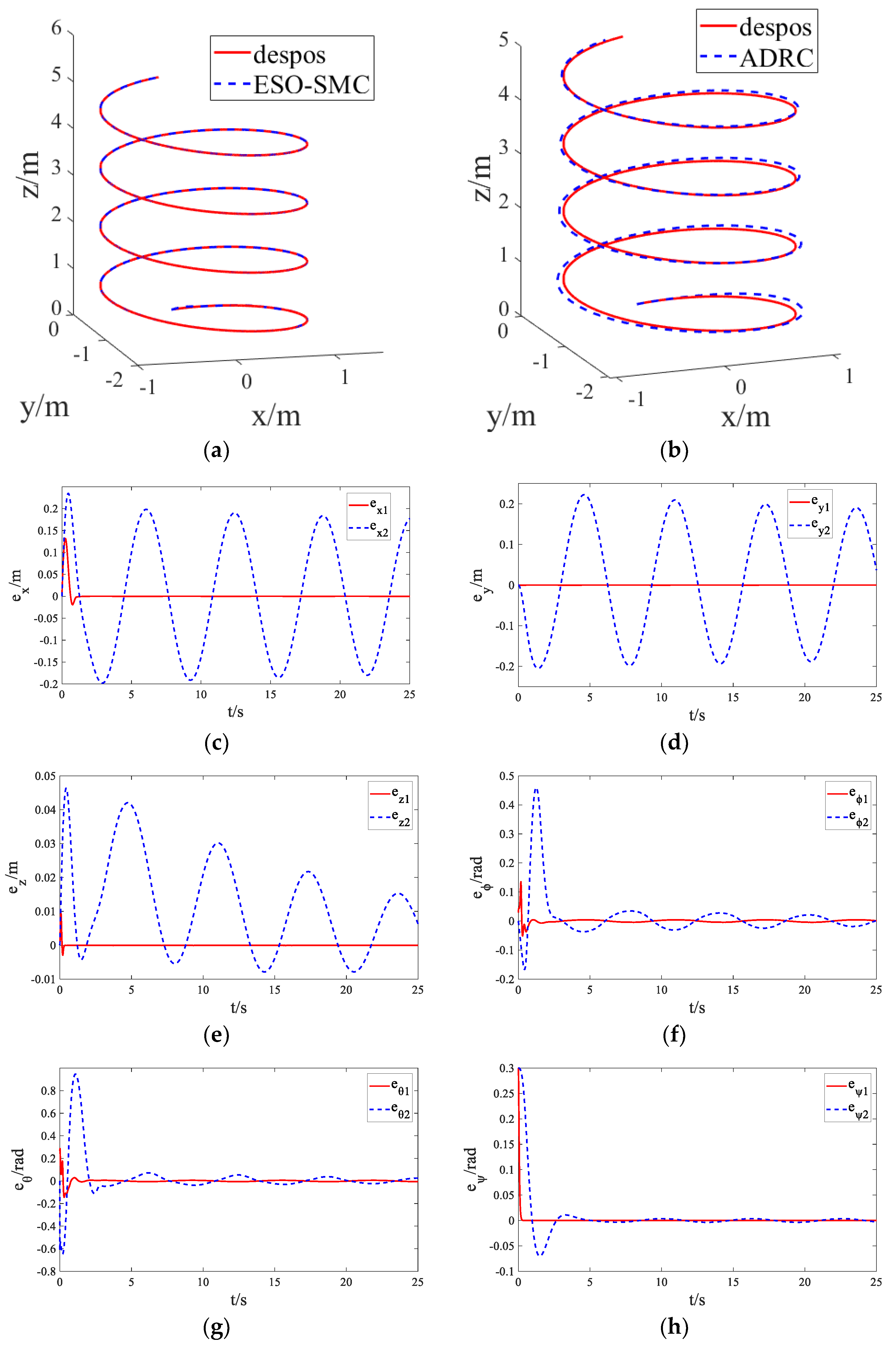
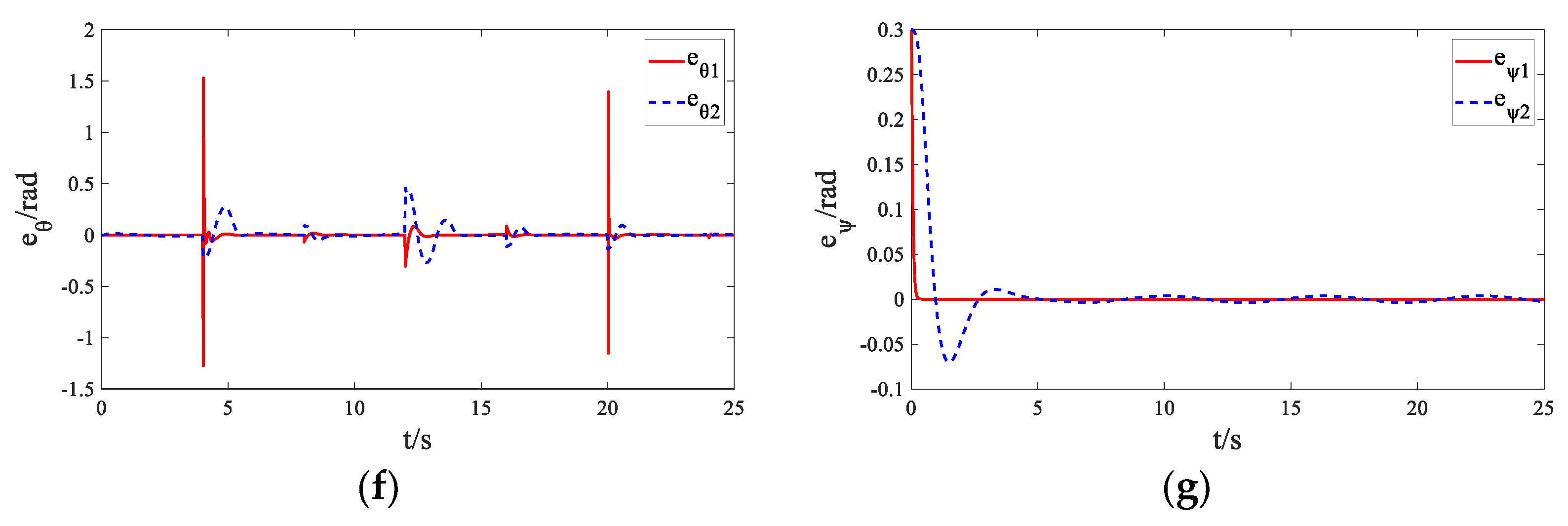
4.3. Simulation Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kocer, B.B.; Tjahjowidodo, T.; Seet, G.G.L. Centralized predictive ceiling interaction control of quadrotor VTOL UAV. Aerosp. Sci. Technol. 2018, 76, 455–465. [Google Scholar] [CrossRef]
- Du, B.H.; Polyakov, A.; Zheng, G.; Quan, Q. Quadrotor trajectory tracking by using fixed-time differentiator. Int. J. Control 2018, 92, 2854–2868. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.; Yang, J.; Yao, H.; Xi, J. Overview of flight control algorithms for quadrotor UAV. Electro. Opt. Control. 2018, 25, 57–62. [Google Scholar]
- Wang, H.Y.; Zhao, J.K.; Yu, W.X.; Tian, W.F. Modelling and position tracking control for quadrotor vehicle. J. Chin. Inert. Technol. 2012, 20, 455–489. [Google Scholar]
- Badr, S.; Mehrez, O.; Kabeel, A.E. A design modification for a quadrotor UAV: Modeling, control and implementation. Adv. Robot. 2019, 33, 13–32. [Google Scholar] [CrossRef]
- Li, Y.B.; Song, S.X. Hovering control of PID four-rotor UAV based on fuzzy self-tuning. Control. Eng. 2013, 20, 910–914. [Google Scholar]
- Zuo, Z.Y.; Mallikarjunan, S.L. adaptive backstepping for robust trajectory tracking of UAVs. IEEE Trans. Ind. Electron. 2017, 64, 2944–2954. [Google Scholar] [CrossRef]
- Djamel, K.; Abdellah, M.; Benallegue, A. Attitude optimal backstepping controller-based quaternion for a UAV [J/OL] Mathematical Problems in Engineering. Math. Probl. Eng. 2016, 2016, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Yin, C.; Huang, X.; Chen, Y.; Dadras, S.; Zhong, S.M.; Cheng, Y. Fractional-order exponential switching technique to enhance sliding mode control. Appl. Math. Model. 2017, 44, 705–726. [Google Scholar] [CrossRef]
- Labbadi, M.; Cherkaoui, M. Robust adaptive backstepping fast terminal sliding mode controller for uncertain quadrotor UAV. Aerosp. Sci. Technol. 2019, 93, 105306. [Google Scholar] [CrossRef]
- Zheng, Z.; Fang, W.; Ying, G.; Hua, C. Multivariable sliding mode backstepping controller design for quadrotor UAV based on disturbance observer. Sci. China 2018, 61, 155–170. [Google Scholar] [CrossRef]
- Chen, F.Y.; Jiang, R.Q.; Zhang, K.K.; Jiang, B.; Tao, G. Robust backstepping sliding-mode control and observer-based fault estimation for a quadrotor UAV. IEEE Trans. Ind. Electron. 2016, 63, 5044–5056. [Google Scholar] [CrossRef]
- Jeong, S.; Chwa, D. Coupled multiple sliding-mode control for robust trajectory tracking of hovercraft with external disturbances. IEEE Trans. Ind. Electron. 2018, 65, 4103–4113. [Google Scholar] [CrossRef]
- Shao, X.L.; Liu, J.; Cao, H.L.; Shen, C.; Wang, H. Robust dynamic surface trajectory tracking control for a quadrotor UAV via extended state observer. Int. J. Robust Nonlinear Control. 2018, 28, 2700–2719. [Google Scholar] [CrossRef]
- Han, J.Q. From PID to active disturbance rejection control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Cheng, Y.; Chen, Z.Q.; Sun, M.W.; Sun, Q. Multivariable-inverted decoupling active disturbance rejection control and its application to a distillation column process. Acta Autom. Sin. 2017, 43, 1080–1088. [Google Scholar]
- Zheng, Q.; Gao, Z. Active disturbance rejection control: Some recent experimental and industrial case studies. Control. Theory Technol. 2018, 16, 301–313. [Google Scholar] [CrossRef]
- Wu, Y.J.; Li, C.; Ma, Z. Triaxial flexible satellite attitude control based on active disturbance rejection sliding mode. J. Syst. Simul. 2015, 27, 1831–1837. [Google Scholar]
- Li, D.Y.; Li, Z.; Jin, Q. ADRC method based on linear state feedback and higher-order Taylor approximation. Control. Decis. 2015, 30, 166–170. [Google Scholar]
- Shao, X.L.; Wang, H. Performance analysis of linear extended state observer and its higher-order form. Control. Decis. 2015, 30, 815–822. [Google Scholar]
- Liu, B.; Qiu, B.; Cui, Y.; Sun, J. Fault-tolerant H ∞ control for net-worked control systems with randomly occurring missing measurements. Neurocomputing 2016, 17, 459–465. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, Z.; Zhang, X.; Sun, Q.; Sun, M. A Novel Control Scheme for Quadrotor UAV Based upon Active Disturbance Rejection Control. Aerosp. Sci. Technol. 2018, 79, 601–609. [Google Scholar] [CrossRef]
- Li, J.; Li, Y. Modeling and PID control for a quadrotor. J. Liaoning Tech. Univ. 2012, 1, 114–117. [Google Scholar]
- Yang, W.Q.; Lu, J.H.; Jiang, X.; Wang, Y.X. Design of quadrotor attitude active disturbance rejection controller based on improved ESO[J/OL], Systems Engineering and Electronics. In Proceedings of the 2021 3rd International Academic Exchange Conference on Science and Technology Innovation (IAECST), Guangzhou, China, 10–12 December 2021. [Google Scholar]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, F.; Yang, Z.; Ji, P. Sliding Mode Controller Based on the Extended State Observer for Plant-Protection Quadrotor Unmanned Aerial Vehicles. Mathematics 2022, 10, 1346. https://doi.org/10.3390/math10081346
Ma F, Yang Z, Ji P. Sliding Mode Controller Based on the Extended State Observer for Plant-Protection Quadrotor Unmanned Aerial Vehicles. Mathematics. 2022; 10(8):1346. https://doi.org/10.3390/math10081346
Chicago/Turabian StyleMa, Fengying, Zhe Yang, and Peng Ji. 2022. "Sliding Mode Controller Based on the Extended State Observer for Plant-Protection Quadrotor Unmanned Aerial Vehicles" Mathematics 10, no. 8: 1346. https://doi.org/10.3390/math10081346
APA StyleMa, F., Yang, Z., & Ji, P. (2022). Sliding Mode Controller Based on the Extended State Observer for Plant-Protection Quadrotor Unmanned Aerial Vehicles. Mathematics, 10(8), 1346. https://doi.org/10.3390/math10081346