
Numerical Method for a Filtration Model Involving a Nonlinear Partial Integro-Differential Equation

 , , , and
, , , and
Abstract
1. Introduction
2. Materials and Methods
2.1. Formulation of the Problem
2.2. Derivation of a Fully Discrete Scheme
2.3. Stability of the Scheme
2.4. Convergence of the Scheme
2.5. Convergence of Newton’s Method
3. Results
3.1. Verification of the Convergence Order
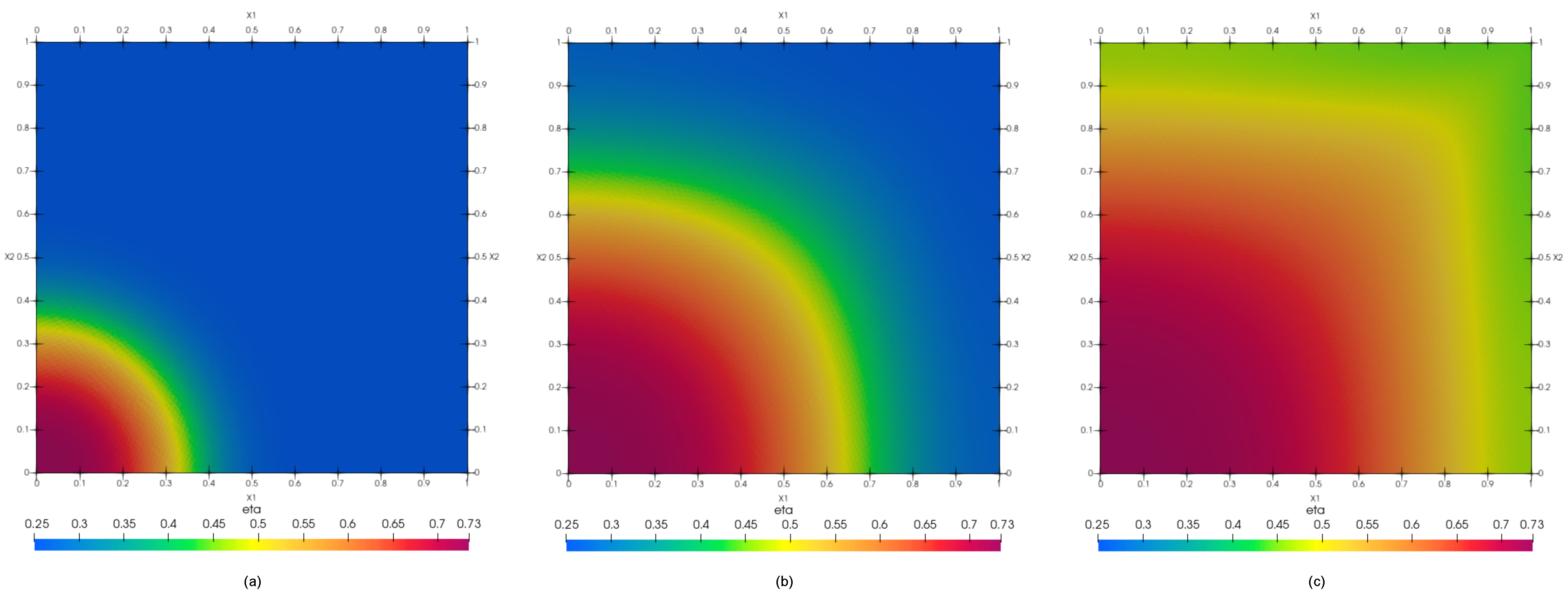
3.2. Modeling the Two-Phase Non-Equilibrium Flow in Porous Media
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Modeling the Flow in a Fractured Porous Medium
References
- Ferreira, J.A.; Pinto, L. An Integro-Differential Model for Non-Fickian Tracer Transport in Porous Media: Validation and Numerical Simulation. Math. Methods Appl. Sci. 2015, 39, 4736–4749. [Google Scholar] [CrossRef]
- Gazizov, R.K.; Lukaschuk, S.Y. Fractional-Differential Approach to Modeling Filtration Processes in Complex Inhomogeneous Porous Media. Vestnik UGATU 2017, 21, 104–112. (in Russian). [Google Scholar]
- Zhou, H.W.; Yang, S.; Zhang, S.Q. Modeling Non-Darcian Flow and Solute Transport in Porous Media with the Caputo–Fabrizio Derivative. Appl. Math. Model. 2019, 68, 603–615. [Google Scholar] [CrossRef]
- Liu, W.; Li, X.; Zhao, Q. A Two-Grid Expanded Mixed Element Method for Nonlinear Non-Fickian Model in Porous Media. Int. J. Comput. Math. 2014, 91, 1299–1314. [Google Scholar] [CrossRef]
- Hashan, M.; Jahana, T.U.; Zaman, L.N.; Imtiaz, S.; Hossain, M.E. Modelling of Fluid Flow Through Porous Media Using Memory Approach: A Review. Math. Comput. Simul. 2020, 177, 643–673. [Google Scholar] [CrossRef]
- Boganik, V.N.; Medvedev, A.I.; Pestrikova, N.A.; Gugnyakov, V. Improving the Reliability of Determining Permeability, Skin Factor, Flow Rate and Productivity Given by the Operation of Gas Wells. Tekhnologia TEK 2006, 3, 34–40. (In Russian) [Google Scholar]
- Wang, P.; Jiang, L.; Chen, S. A Nonconforming Scheme for Non-Fickian Flow in Porous Media. J. Inequalities Appl. 2017, 142, 1–16. [Google Scholar] [CrossRef]
- Li, X.; Rui, H. A Two-Grid Block-Centered Finite Difference Method for Nonlinear Non-Fickian Flow Model. Appl. Math. Comput. 2016, 281, 300–313. [Google Scholar] [CrossRef]
- Ewing, R.; Wang, H. A Summary of Numerical Methods for Time-Dependent Advection-Dominated Partial Differential Equations. J. Comput. Appl. Math. 2001, 128, 423–445. [Google Scholar] [CrossRef]
- Sharma, P.K.; Agarwal, P.; Mehdinejadiani, B. Study on Non-Fickian Behavior for Solute Transport Through Porous Media. J. Hydraul. Eng. 2020, 28, 171–179. [Google Scholar] [CrossRef]
- Peszynska, M. Analysis of an Integro-Differential Equation Arising Form Modelling of Flows with Fading Memory Through Fissured Media. J. Partial. Differ. Equ. 1995, 8, 173–195. [Google Scholar]
- Yermagambetov, T.K. Algorithm for Numerical Implementation of a Filtration Model with a Generalized Nonequilibrium Law. Proc. Natl. Acad. Sci. Repub. Kazakhstan Phys.-Math. Ser. 2010, 2, 94–96. [Google Scholar]
- Gabbasov, M.B. On the Solvability of a Problem of Nonequilibrium Inhomogeneous Countercurrent Capillary Filtration. In Abstracts of the Conference "Boundary Value Problems and Their Spectral Questions for Differential Equations"; Publishing House of Kazakh State University: Almaty, Kazakhstan, 1991. (In Russian) [Google Scholar]
- Barenblatt, G.I.; Vinnichenko, A.P. Non-equilibrium filtration of immiscible fluids. Adv. Mech. 1980, 3, 52–58. (In Russian) [Google Scholar]
- Faizulin, T.A. Mathematical Modeling of Relaxation Phenomena during the Flow of an Inhomogeneous Fluid in Porous Media. Ph.D. Thesis, Ufa State Aviation Technical University, Ufa, Russia, 2008. (In Russian). [Google Scholar]
- Avazzadeh, Z.; Beygi Rizi, Z.; Maalek Ghaini, F.M.; Loghmani, G.B. A Numerical Solution of Nonlinear Parabolic-Type Volterra Partial Integro-Differential Equations Using Radial Basis Functions. Eng. Anal. Bound. Elem. 2012, 36, 881–893. [Google Scholar] [CrossRef]
- Fakhar-Izadi, F.; Dehghan, M. Fully Spectral Collocation Method for Nonlinear Parabolic Partial Integro-Differential Equations. Appl. Numer. Math. 2018, 123, 99–120. [Google Scholar] [CrossRef]
- Cannon, J.R.; Lin, Y. Non-classical H1 Projection and Galerkin Methods for Non-Linear Parabolic Integro-Differential Equations. Calcolo 1988, 25, 187–201. [Google Scholar] [CrossRef]
- Singh, S.; Patel, V.K.; Singh, V.K. Convergence Rate of Collocation Method Based on Wavelet for Nonlinear Weakly Singular Partial Integro-Differential Equation Arising from Viscoelasticity. Numer. Methods Partial. Differ. Equ. 2018, 34, 1781–1798. [Google Scholar] [CrossRef]
- Mahdavi, S.; Kajani, M.T. Nonlinear Integro-Differential Equations. J. Math. Ext. 2010, 4, 107–117. [Google Scholar]
- Amin, R.; Mahariq, I.; Shah, K.; Awais, M.; Elsayed, F. Numerical Solution of the Second Order Linear and Nonlinear Integro-Differential Equations Using Haar Wavelet Method. Arab. J. Basic Appl. Sci. 2021, 28, 12–20. [Google Scholar] [CrossRef]
- Lepik, Ü. Haar Wavelet Method for Nonlinear Integro-Differential Equations. Appl. Math. Comput. 2006, 176, 324–333. [Google Scholar] [CrossRef]
- Erfanian, M.; Mansoori, A. Solving the Nonlinear Integro-Differential Equation in Complex Plane with Rationalized Haar Wavelet. Math. Comput. Simul. 2019, 165, 223–237. [Google Scholar] [CrossRef]
- Wang, Y.; Zhu, L. Solving Nonlinear Volterra Integro-Differential Equations of Fractional Order by Using Euler Wavelet Method. Adv. Differ. Equ. 2017, 27, 1–16. [Google Scholar] [CrossRef]
- Costarelli, D.; Spigler, R. A Collocation Method for Solving Nonlinear Volterra Integro-Differential Equations of Neutral Type by Sigmoidal Functions. J. Integral Equ. Appl. 2014, 26, 15–52. [Google Scholar] [CrossRef]
- Al-Saar, F. Solving Nonlinear Fredholm Integro-Differential Equations Via Modifications of Some Numerical Methods. Adv. Theory Nonlinear Anal. Its Appl. 2021, 5, 260–276. [Google Scholar] [CrossRef]
- Yildirim, A. Application of He’s Variational Iteration Method to Nonlinear Integro-Differential Equations. Z. Naturforschung A 2010, 65, 418–430. [Google Scholar] [CrossRef]
- Liu, Y.; Gurran, C.S. Solving Nonlinear Differential Difference Equations Using He’s Variational Iteration Method. Appl. Math. Comput. Sci. 2011, 3, 33–46. [Google Scholar]
- Batiha, B.; Noorani, M.S.M.; Hashim, I. Numerical Solutions of the Nonlinear Integro-Differential Equations. Int. J. Open Probl. Comput. Sci. Math. 2008, 1, 34–42. [Google Scholar]
- Roul, P.; Meyer, P. Numerical Solutions of Systems of Nonlinear Integro-Differential Equations by Homotopy-Perturbation Method. Appl. Math. Model. 2011, 35, 4234–4242. [Google Scholar] [CrossRef]
- Sekar, S.; Thirumurugan, A.S. Numerical Investigation of the Nonlinear Integro-Differential Equations Using He’s Homotopy Perturbation Method. Malaya J. Mat. 2017, 5, 389–394. [Google Scholar]
- Sharif, A.A.; Hamoud, A.A.; Ghadle, K.P. Solving Nonlinear Integro-Differential Equations by Using Numerical Techniques. Acta Univ. Apulensis 2020, 61, 45–53. [Google Scholar]
- Dehghan, M.; Salehi, R. The Numerical Solution of the Non-Linear Integro-Differential Equations Based on the Meshless Method. J. Comput. Appl. Math. 2012, 236, 2367–2377. [Google Scholar] [CrossRef]
- Al-Mazmumy, M.; Almuhalbedi, S.O. Solution of Nonlinear Integro Differential Equations by Two-Step Adomian Decomposition Method (TSAM). Int. J. Mod. Nonlinear Theory Appl. 2016, 5, 248–255. [Google Scholar] [CrossRef]
- Abdou, M.A.; Youssef, M.I. On a Method for Solving Nonlinear Integro Differential Equation of Order n. J. Math. Comput. Sci. 2021, 25, 322–340. [Google Scholar] [CrossRef]
- Khanlari, N.; Paripour, M. Solving Nonlinear Integro-Differential Equations Using the Combined Homotopy Analysis Transform Method with Adomian Polynomials. Commun. Math. Appl. 2018, 9, 637–650. [Google Scholar]
- Daliri Birjandi, M.H.; Saberi-Nadjafi, J.; Ghorbani, A. An Efficient Numerical Method for a Class of Nonlinear Volterra Integro-Differential Equations. J. Appl. Math. 2018, 2018, 7461058. [Google Scholar] [CrossRef]
- Behiry, S.H. Nonlinear Integro-Differential Equations by Differential Transform Method with Adomian Polynomials. Math. Sci. Lett. 2013, 2, 209–221. [Google Scholar] [CrossRef][Green Version]
- Yermagambetov, T.K. Solvability and Numerical Study of the Model of Nonequilibrium Filtration of Two Incompressible Fluids with a Generalized Law of Nonequilibrium. Ph.D. Thesis, Al-Farabi Kazakh National University, Almaty, Kazakhstan, 2010. (In Russian). [Google Scholar]
- Chen, C.; Zhang, X.; Zhang, G.; Zhang, Y. A Two-Grid Finite Element Method for Nonlinear Parabolic Integro-Differential Equations. Int. J. Comput. Math. 2018, 96, 2010–2023. [Google Scholar] [CrossRef]
- Soradi-Zeid, S.; Mesrizadeh, M. The Method of Lines for Parabolic Integro-Differential Equations. J. Math. Model. 2020, 8, 291–308. [Google Scholar]
- Ewing, R.; Lazarov, R.; Lin, Y. Finite Volume Element Approximations of Nonlocal Reactive Flows in Porous Media. Numer. Methods Partial. Differ. Equ. 2000, 16, 285–311. [Google Scholar] [CrossRef]
- Sinha, R.K.; Ewing, R.; Lazarov, R. Mixed Finite Element Approximations of Parabolic Integro-Differential Equations with Nonsmooth Initial Data. SIAM J. Numer. Anal. 2009, 47, 3269–3292. [Google Scholar] [CrossRef]
- Al-Humedi, H.O.; Al-Abadi, A.K. Analysis of Error Estimate for Expanded H1-Galerkin MFEM of PIDEs with Nonlinear Memory. In Proceedings of the International Conference on Emerging Applications in Material Science and Technology, Namakkal, India, 30–31 January 2020; Volume 2235, p. 020010. [Google Scholar]
- Gürbüz, B.; Sezer, M. A New Computational Method Based on Laguerre Polynomials for Solving Certain Nonlinear Partial Integro Differential Equations. Acta Phys. Pol. A 2017, 132, 561–563. [Google Scholar] [CrossRef]
- Da, X. Finite Element Methods of the Two Nonlinear Integro-Differential Equations. Appl. Math. Comput. 1993, 58, 241–273. [Google Scholar] [CrossRef]
- Adams, R. Sobolev Spaces; Academic Press: New York, NY, USA, 1975. [Google Scholar]
- Brezzi, F.; Fortin, M. Mixed and Hybrid Finite Element Methods; Springer: New York, NY, USA, 1991. [Google Scholar]
- Radu, F.A.; Pop, I.S. Simulation of Reactive Contaminant Transport with Non-Equilibrium Sorption by Mixed Finite Elements and Newton Method. Comput. Geosci. 2011, 15, 431–450. [Google Scholar] [CrossRef]
- Barenblatt, G.I. Filtration of Two Nonmixing Fluids in a Homogeneous Porous Medium. Mech. Gas Fluids 1971, 5, 57–64. (In Russian) [Google Scholar] [CrossRef]
- Moghadasi, L.; Guadagnini, A.; Inzoli, F.; Bartosek, M. Interpretation of Two-phase Relative Permeability Curves Through Multiple Formulations and Model Quality Criteria. J. Pet. Sci. Eng. 2015, 135, 738–749. [Google Scholar] [CrossRef]
- Chen, Z. Reservoir Simulation: Mathematical Techniques in Oil Recovery; SIAM: Philadelphia, PA, USA, 2007; p. 17. [Google Scholar]
- Barenblatt, G.I.; Gilman, A.A. Mathematical model of nonequilibrium countercurrent capillary impregnation. Eng. Phys. J. 1987, 52, 456–461. [Google Scholar] [CrossRef]
- Caputo, M. Models of Flux in Porous Media with Memory. Water Resour. Res. 2000, 36, 693–705. [Google Scholar] [CrossRef]
- Agarwal, R.; Yadav, M.P.; Baleanu, D.; Purohit, S.D. Existence and Uniqueness of Miscible Flow Equation Through Porous Media with a Non Singular Fractional Derivative. AIMS Math. 2020, 5, 1062–1073. [Google Scholar] [CrossRef]
- Zhong, W.; Li, C.; Kou, J. Numerical Fractional-Calculus Model for Two-Phase Flow in Fractured Media. Adv. Math. Phys. 2013, 2013, 429835. [Google Scholar] [CrossRef]
- Vijayakumar, V.; Nisar, K.S.; Chalishajar, C.; Shukla, A.; Malik, M.; Alsaadi, A.; Aldosary, S.F. A Note on Approximate Controllability of Fractional Semilinear Integrodifferential Control Systems via Resolvent Operators. Fractal Fract. 2022, 6, 73. [Google Scholar] [CrossRef]
- Tian, H. Asymptotic Stability Analysis of the Linear θ-Method for Linear Parabolic Differential Equations with Delay. J. Differ. Equ. Appl. 2009, 15, 473–487. [Google Scholar] [CrossRef]
- Singh, A.; Shukla, A.; Vijayakumar, V.; Udhayakumar, R. Asymptotic Stability of Fractional Order (1, 2] Stochastic Delay Differential equations in Banach spaces. Chaos Solitons Fractals 2021, 150, 111095. [Google Scholar] [CrossRef]
- Larsson, S. The Long time Behavior of Finite-element Approximations of Solutions to Semilinear Parabolic Problems. SIAM J. Numer. Anal. 1989, 26, 348–365. [Google Scholar] [CrossRef]
- Vijayakumar, V.; Udhayakumar, R.; Dineshkumar, C. Approximate Controllability of Second Order Nonlocal Neutral Differential Evolution Inclusions. IMA J. Math. Control. Inf. 2021, 38, 192–210. [Google Scholar] [CrossRef]
- Caputo, M.; Fabrizio, M. Applications of New Time and Spatial Fractional Derivatives with Exponential Kernels. Progr. Fract. Differ. Appl. 2016, 2, 1–11. [Google Scholar] [CrossRef]
- Baigereyev, D.; Alimbekova, N.; Berdyshev, A.; Madiyarov, M. Convergence Analysis of a Numerical Method for a Fractional Model of Fluid Flow in Fractured Porous Media. Mathematics 2021, 9, 2179. [Google Scholar] [CrossRef]
- Atangana, A. Extension of Rate of Change Concept: From Local to Nonlocal Operators with Applications. Results Phys. 2020, 19, 103515. [Google Scholar] [CrossRef]


{kind=link}
| Our Method | Method in [12] | |||
|---|---|---|---|---|
| -Error | Order | -Error | Order | |
| 1/10 | - | - | ||
| 1/20 | 2.03 | 1.42 | ||
| 1/40 | 2.10 | 1.69 | ||
| 1/80 | 2.10 | 1.22 | ||
| 1/160 | 2.02 | 1.02 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Baigereyev, D.; Omariyeva, D.; Temirbekov, N.; Yergaliyev, Y.; Boranbek, K. Numerical Method for a Filtration Model Involving a Nonlinear Partial Integro-Differential Equation. Mathematics 2022, 10, 1319. https://doi.org/10.3390/math10081319
Baigereyev D, Omariyeva D, Temirbekov N, Yergaliyev Y, Boranbek K. Numerical Method for a Filtration Model Involving a Nonlinear Partial Integro-Differential Equation. Mathematics. 2022; 10(8):1319. https://doi.org/10.3390/math10081319
Chicago/Turabian StyleBaigereyev, Dossan, Dinara Omariyeva, Nurlan Temirbekov, Yerlan Yergaliyev, and Kulzhamila Boranbek. 2022. "Numerical Method for a Filtration Model Involving a Nonlinear Partial Integro-Differential Equation" Mathematics 10, no. 8: 1319. https://doi.org/10.3390/math10081319
APA StyleBaigereyev, D., Omariyeva, D., Temirbekov, N., Yergaliyev, Y., & Boranbek, K. (2022). Numerical Method for a Filtration Model Involving a Nonlinear Partial Integro-Differential Equation. Mathematics, 10(8), 1319. https://doi.org/10.3390/math10081319