
On the Wavelet Collocation Method for Solving Fractional Fredholm Integro-Differential Equations



Abstract
:1. Introduction
2. Preliminaries
2.1. Fractional Calculation
2.2. Müntz–Legendre Wavelets
2.3. Representation of Fractional Integral Operator in ML Wavelets
3. Wavelet Collocation Method
- Let us put , then we can writewhere the j-th element of the N dimensional vector is obtained by .
- After putting the approximate solution into and then approximating it and the kernel function using operator , we havewhere G is an N-dimensional vector whose j-th element is , and K is a square matrix of dimension whose -element isReplacing (33) into , we obtainTo give rise to the discretized form of , using the operational matrix and (35), we obtain
- In the same way as the previous item, we can use the projection for the term , aswhere F is a N-dimension vector whose j-th element is .
Error Analysis
- 1.
- if , then we haveand it follows from Lemma 1 thatSince the function g is continuous, then is bounded.
- 2.
- Let . Motivated by the Lemma 2.21 [17], it is easy to writeTaking the norm from both sides of (42) and using Lemma 2, we haveAs a result, we can bound this case according to the previous one.
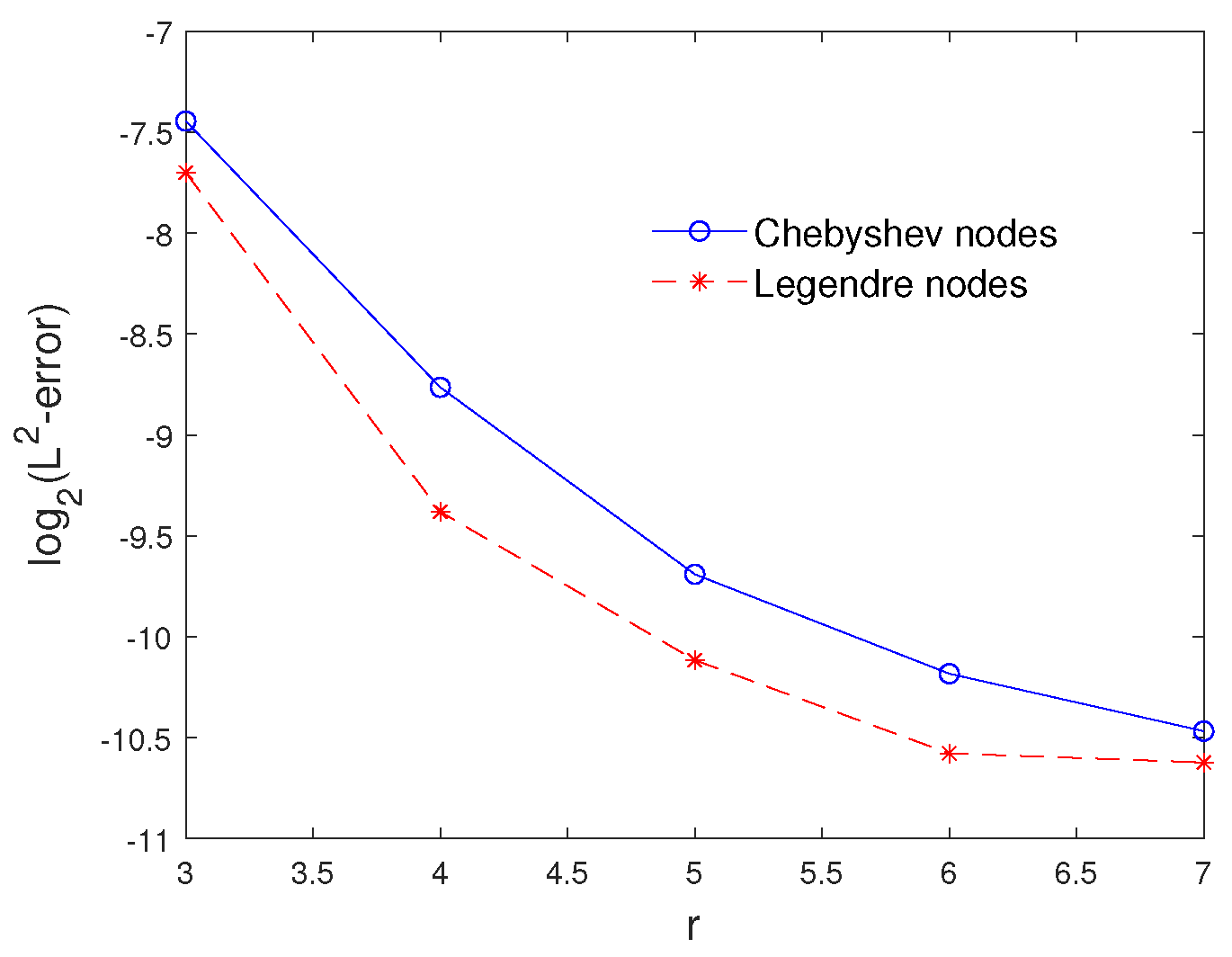
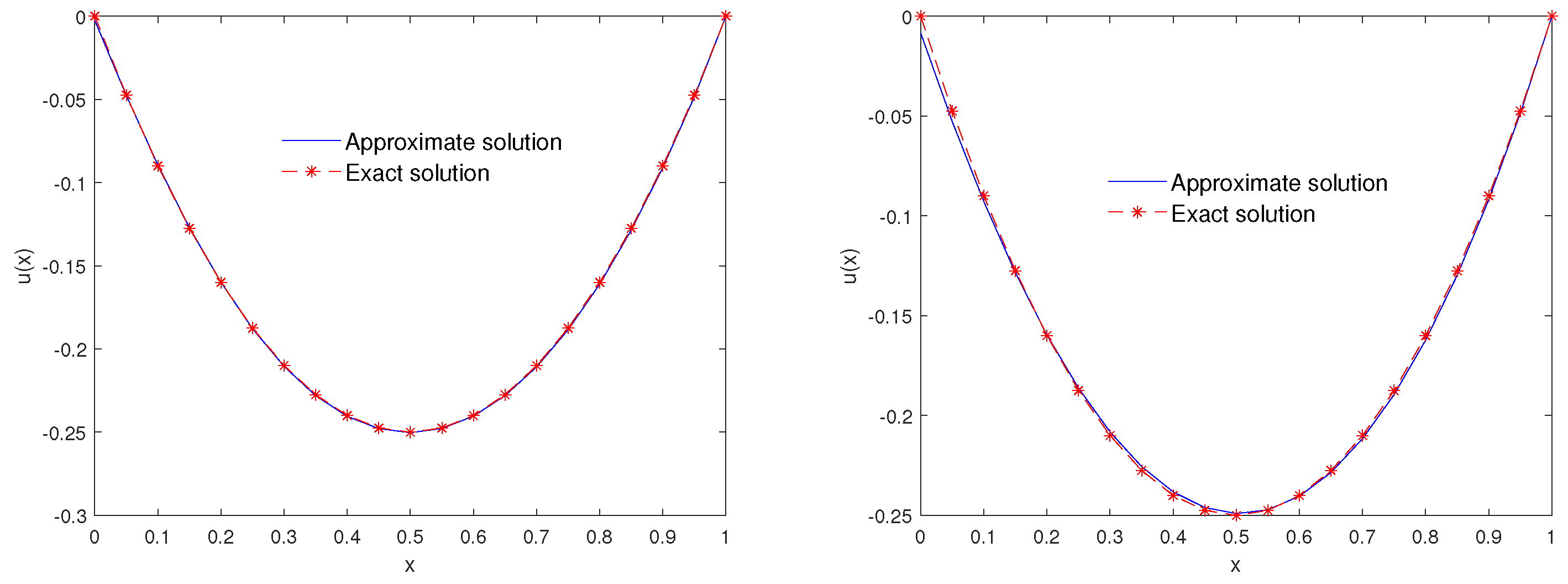
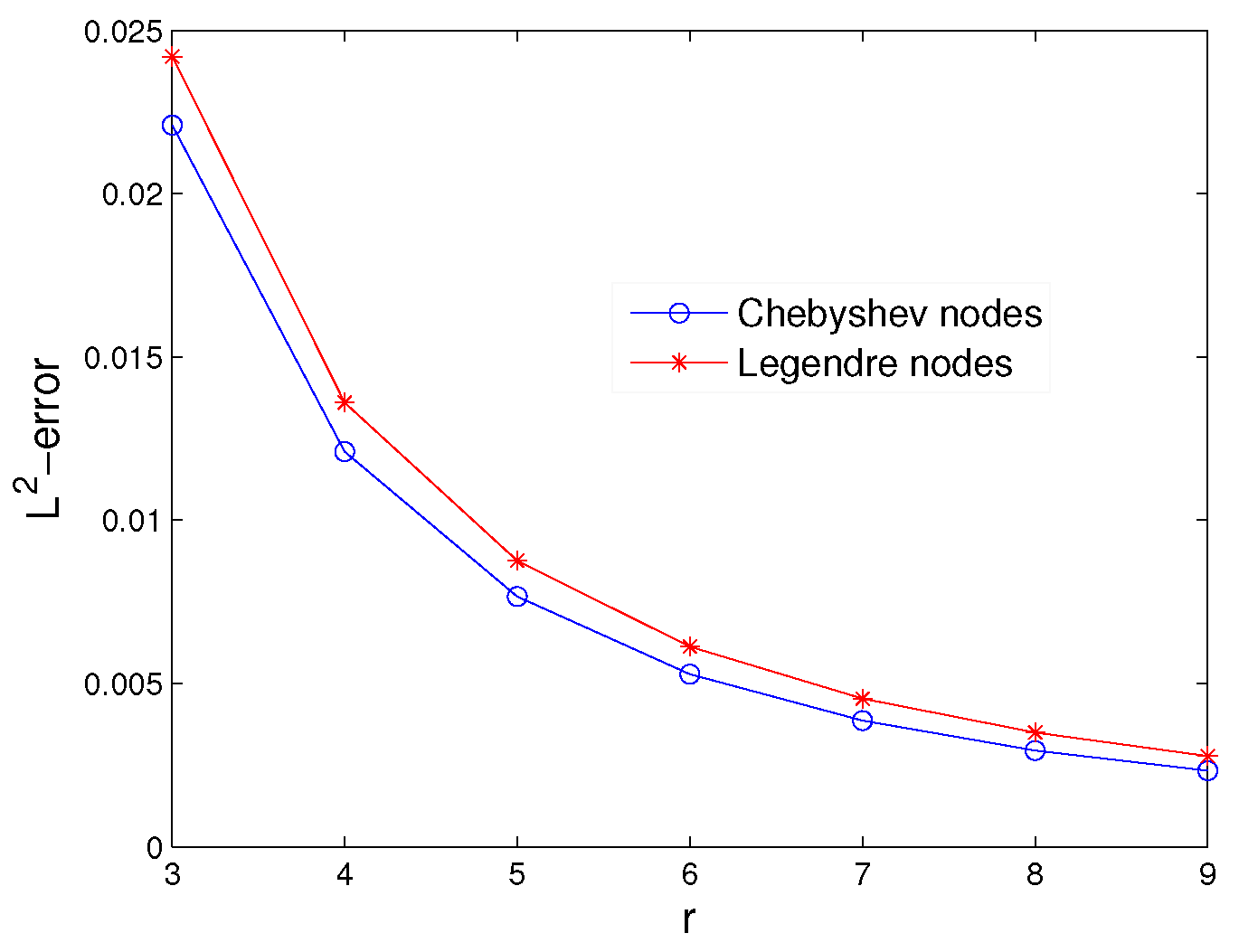
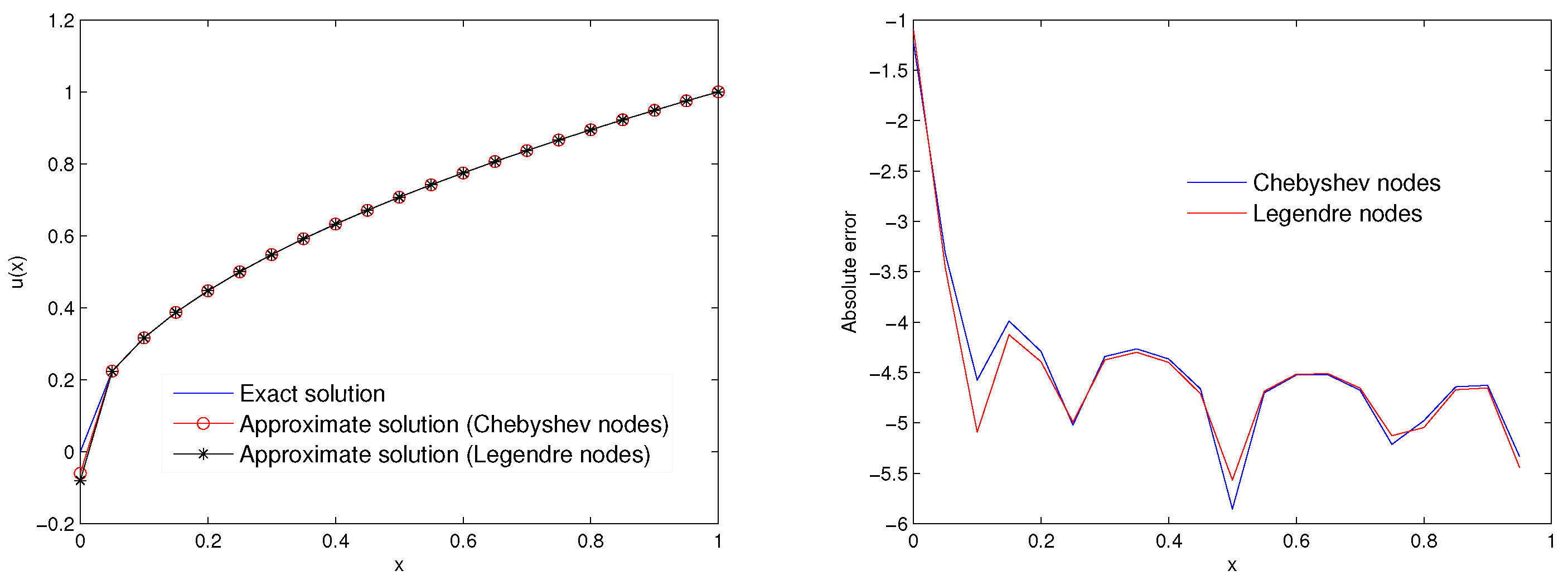
4. Numerical Experiments
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| FFIDEs | fractional Fredholm integro-differential equations |
| ML | Müntz–Legendre |
| RL | Riemann–Liouville |
References
- Aminikhah, H. A new analytical method for solving systems of linear integro-differential equations. J. King Saud Univ. Sci. 2011, 23, 349–353. [Google Scholar] [CrossRef] [Green Version]
- Angstmann, C.N.; Henry, B.I.; McGann, A.V. A fractional order recovery SIR model from a stochastic process. Bull. Math. Biol. 2016, 78, 468–499. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Eslahchi, M.R.; Dehghan, M.; Parvizi, M. Application of the collocation method for solving nonlinear fractional integro-differential equations. J. Comput. Appl. Math. 2014, 257, 105–128. [Google Scholar] [CrossRef]
- Rawashdeh, E.A. Numerical solution of fractional integro-differential equations by collocation method. Appl. Math. Comput. 2006, 176, 1–6. [Google Scholar] [CrossRef]
- Momani, S.; Noor, M.A. Numerical methods for fourth order fractional integro-differential equations. Appl. Math. Comput. 2006, 182, 754–760. [Google Scholar] [CrossRef]
- Momani, S.; Qaralleh, A. An Efficient Method for Solving Systems of Fractional Integro-Differential Equations. Comput. Math. Appl. 2006, 52, 459–470. [Google Scholar] [CrossRef] [Green Version]
- Zhu, L.; Fan, Q. Solving fractional nonlinear Fredholm integro-differential equations by the second kind Chebyshev wavelet. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 2333–2341. [Google Scholar] [CrossRef]
- Arikoglu, A.; Ozkol, I. Solution of fractional integro-differential equations by using fractional differential transform method. Chaos Solitons Fractals 2009, 40, 521–529. [Google Scholar] [CrossRef]
- Saeedi, H.; Mohseni Moghadam, M.; Mollahasani, N.; Chuev, G.N. A CAS wavelet method for solving nonlinear Fredholm integro-differential equations of fractional order. Commun. Nonl. Sci. Numer. Simul. 2011, 16, 1154–1163. [Google Scholar] [CrossRef]
- Shahmorad, S.; Ostadzad, M.H.; Baleanu, D. A Tau–like numerical method for solving fractional delay integro–differential equations. Appl. Numer. Math. 2019, 151, 322–336. [Google Scholar] [CrossRef]
- Baleanu, D.; Rezapour, S.; Saberpour, Z. On fractional integro-differential inclusions via the extended fractional Caputo-Fabrizio derivation. Bound. Value Probl. 2019, 2019, 79. [Google Scholar] [CrossRef]
- Baleanu, D.; Mousalou, A.; Rezapour, S. A new method for investigating approximate solutions of some fractional integro-differential equations involving the Caputo-Fabrizio derivative. Adv. Differ. Equ. 2017, 2017, 51. [Google Scholar] [CrossRef] [Green Version]
- Rahimkhani, P.; Ordokhani, Y.; Babolian, E. Müntz-Legendre wavelet operational matrix of fractional-order integration and its applications for solving the fractional pantograph differential equations. Numer. Algorithms 2018, 77, 1283–1305. [Google Scholar] [CrossRef]
- Rahimkhani, P.; Ordokhani, Y. Numerical solution a class of 2D fractional optimal control problems by using 2D Müntz-Legendre wavelets. Optim. Control. Appl. Methods 2018, 39, 1916–1934. [Google Scholar] [CrossRef]
- Mokhtary, P.; Ghoreishi, F.; Srivastava, H.M. The Müntz-Legendre tau method for fractional differential equations. Appl. Math. Model. 2016, 40, 671–684. [Google Scholar] [CrossRef]
- Bin Jebreen, H.; Tchier, F. A New Scheme for Solving Multiorder Fractional Differential Equations Based on Müntz–Legendre Wavelets. Complexity 2021, 2021, 9915551. [Google Scholar] [CrossRef]
- Kilbas, A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; Elsevier: Amsterdam, The Netherlands, 2006; Volume 204. [Google Scholar]
- Mallat, S.G. A Wavelet Tour of Signal Processing; Academic Press: Cambridge, MA, USA, 1999. [Google Scholar]
- Almira, J.M. Müntz type theorems I. Surv. Approx. Theory 2007, 3, 152–194. [Google Scholar]
- Müntz, C.H. Über den Approximationssatz von Weierstrass; Springer: Berlin/Heidelberg, Germany, 1914; pp. 303–312. [Google Scholar]
- Shen, J.; Wang, Y. Müntz-Galerkin methods and applicationa to mixed dirichlet-neumann boundary value problems. SIAM J. Sci. Comput. 2016, 38, 2357–2381. [Google Scholar] [CrossRef]
- Borwein, P.; Erdélyi, T.; Zhang, J. Müntz systems and orthogonal Müntz–Legendre polynomials. Trans. Am. Math. Soc. 1994, 342, 523–542. [Google Scholar]
- Paseban-Hag, S.; Osgooei, E.; Ashpazzadeh, E. Alpert wavelet system for solving fractional nonlinear Fredholm integro-differential equations. Comput. Methods Differ. Equ. 2021, 9, 762–773. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Proposed Method | Alpert’s Multiwavelets Method [23] | |||
|---|---|---|---|---|
| -error | ||||
| Chebyshev nodes | ||||||
| Legendre nodes | ||||||
| Chebyshev nodes | ||||||
| Legendre nodes | ||||||
| Proposed Method | Alpert’s Multiwavelets Method [23] | |||
|---|---|---|---|---|
| -error | ||||
| Chebyshev nodes | ||||||
| Legendre nodes | ||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bin Jebreen, H.; Dassios, I. On the Wavelet Collocation Method for Solving Fractional Fredholm Integro-Differential Equations. Mathematics 2022, 10, 1272. https://doi.org/10.3390/math10081272
Bin Jebreen H, Dassios I. On the Wavelet Collocation Method for Solving Fractional Fredholm Integro-Differential Equations. Mathematics. 2022; 10(8):1272. https://doi.org/10.3390/math10081272
Chicago/Turabian StyleBin Jebreen, Haifa, and Ioannis Dassios. 2022. "On the Wavelet Collocation Method for Solving Fractional Fredholm Integro-Differential Equations" Mathematics 10, no. 8: 1272. https://doi.org/10.3390/math10081272
APA StyleBin Jebreen, H., & Dassios, I. (2022). On the Wavelet Collocation Method for Solving Fractional Fredholm Integro-Differential Equations. Mathematics, 10(8), 1272. https://doi.org/10.3390/math10081272