1. Introduction
The aircraft hydraulic system provides energy for flight control, landing gear retracting and braking, etc. It has a complex structure and a severe working environment. Therefore, it is an airborne system having a high accident rate and high maintenance support cost. According to statistics, 30% of the mechanical failures in civil aviation aircrafts are caused by hydraulic system failures [
1]. The actuator system, which controls the deflection force of the rudder surface required for flight, is the “muscle” of large aircrafts. It is a crucial control subsystem used to perform the flight attitude and trajectory control. Its performance and reliability directly affect the flight quality and aircraft safety. Increasing the reliability and service capacity of the actuator system and reducing the power consumption, are crucial challenges [
2,
3]. With the increasing requirements of reliability and economy of large aircrafts, DRAS has been widely used, since it can avoid some unknown common cause failures, and achieve high performance and reliability of flight control system. Therefore, DRAS can be considered as the development trend of large aircraft actuator systems [
4].
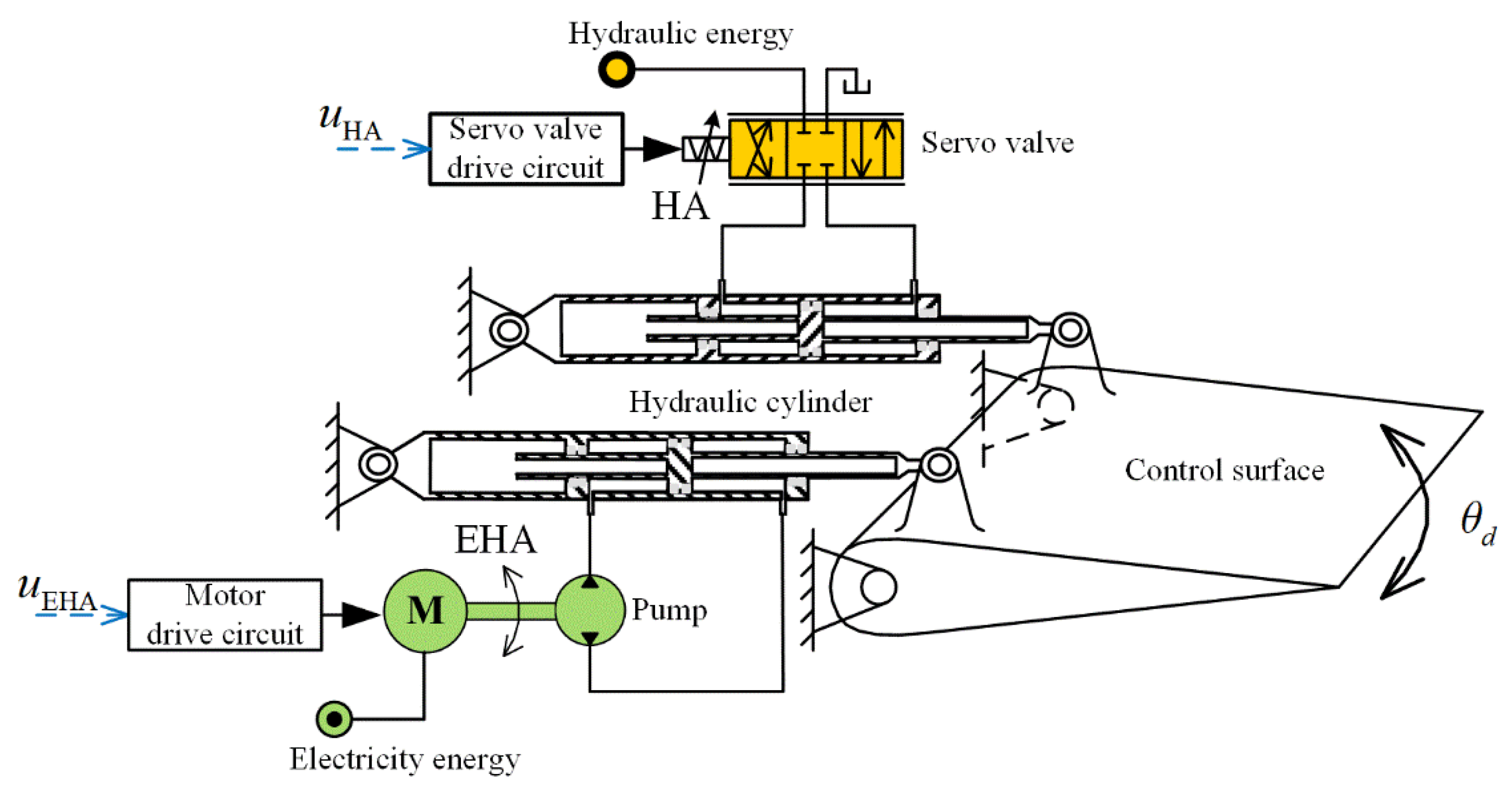
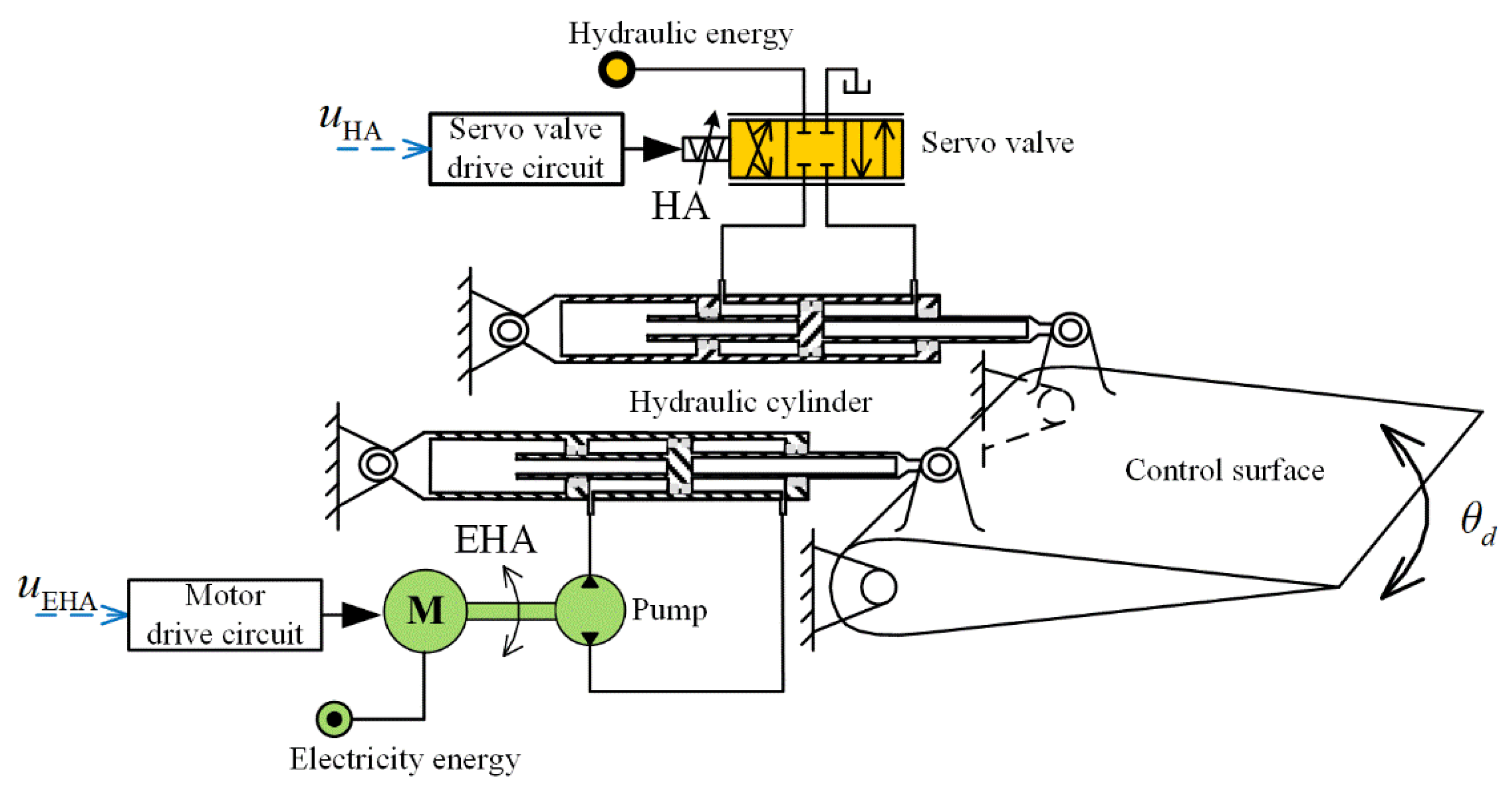
DRAS is mainly composed of a traditional hydraulic actuation system (HAS) and an electro-hydrostatic actuation system (EHAS), that together drive the control surface of the aircraft [
5]. HAS is a widely used driving method on aircrafts. It has the advantages of high control accuracy, fast response speed and strong driving ability. EHAS has the advantages of light weight and high reliability. Therefore, DRAS has the advantages of fast dynamic response of HAS, as well as the advantage of high reliability of EHAS. It is the development direction of the aircraft actuation system [
6,
7,
8]. For instance, Airbus 380 has an actuation system which uses dissimilar hydraulic power and electronic power to drive the control surface deflection, in order to avoid the serious consequences caused by common cause failure in the actuation system [
9]. Once the failure of key components in the DRAS system occurs, the system performance inevitably decreases. A serious component failure may even lead to the collapse of the whole DRAS. Therefore, it is necessary to identify the key components of the system and determine the performance degradation mechanism, in order to prevent the occurrence of these events. Cai et al. [
10,
11] propose a method which applies the Bayesian networks to quantitatively assess operational risks in the offshore oil industry, and identify the order of importance of factors affecting the operation of the subsea oil hydraulic systems. In order to efficiently evaluate the reliability of the system, Zhu et al. [
12,
13] propose a random analysis framework. They obtain the reliability of the system by analyzing several benchmarks. This also provides a novel method for system reliability evaluation. In order to optimize the reliability design of hydraulic system with vibration, Zhang et al. [
14] propose a reliability design method to efficiently solve the problem of reliability optimization design of hydraulic system with impact vibration. In addition, some researchers worked on the system availability and residual lifetime [
15]. However, for a hydraulic system, the reliability of the components is the basis of the reliability of the hydraulic system. Therefore, when the hydraulic system is working, it is very important to determine the importance of each component in the hydraulic system, so that the weak parts can be found, and the preventive maintenance or replacement can be performed in time.
The importance measure is a crucial method to identify weak links in a system. It can evaluate the impact of the component reliability changes on the system. Therefore, it is widely used in the identification of key components and system reliability analysis [
16,
17,
18]. Birnbaum [
19] first proposes the concept of importance measure in 1968, and discusses the relationship between component reliability and system reliability in binary coherent systems. Griffith [
20] extends the Birnbaum importance measure and uses its extension to study the impact of the component improvements on the system performance. Wu et al. [
21] propose a novel utility importance measure of component state, which overcomes some shortcomings of the Griffith importance measure. They also discuss the contribution of a single component to the performance utility of a multi-state system. Si et al. [
22] propose an integrated importance measure of performing preventive maintenance on multi-state repairable systems, in order to maximize the system performance. Dui et al. [
23,
24] extend the integrated importance measure to include semi-Markov processes, in order to analyze how the component state transitions affect the system performance. In addition, they propose a joint integrated importance measure to evaluate the impact of the maintenance between two related components on the system performance, in multiple states. Moreover, Dui et al. [
25] also consider the cost of system maintenance. They propose a cost-based component maintenance importance measure in order to minimize the system maintenance costs. Zhang et al. [
26] propose an importance-based maintenance priority model to guide the selection of preventive maintenance components, in order to minimize the expected maintenance cost of the system. These importance measure indicators are used in several fields, such as the electronics industry, aerospace and oil exploration [
27,
28,
29], for example.
Although these studies have made some contributions to the reliability analysis and maintenance of the system, most of the studies on DRAS focus on the reliability analysis of each component, rather than analyzing the impact of the performance degradation of each component on the system reliability from the system level. Furthermore, due to the limitations of maintenance resources, the DRAS components cannot be simultaneously maintained. Therefore, it is necessary to determine the weak links of DRAS and pay attention to them in the maintenance process, in order to improve the reliability of the system during operation, and reduce the maintenance cost of the whole life cycle. These problems have not been solved in the existing studies of DRAS system. This paper first analyzes the performance degradation mechanism of the DRAS components. It then derives a component reliability calculation method based on performance degradation. Afterwards, it identifies the key components in the system. Finally, it proposes a system maintenance strategy based on importance measure.
The remainder of this paper is organized as follows.
Section 2 introduces the performance degradation mechanism and reliability estimation method of the main components in the dissimilar redundancy actuation system. In
Section 3, two importance measures based on reliability variations are introduced, and the relationship between them is derived. In
Section 4, the importance measure index related to performance is used in the dissimilar redundancy actuation system, and the corresponding component maintenance priority strategy is proposed. Finally, the conclusions are drawn in
Section 5.
3. Analysis of Component Importance Change of DRAS
When DRAS has been operating for a certain period of time, it is important to consider the maintenance, which is performed throughout the life cycle of the system. The importance measure refers to the impact of the failure or state change of one or more components on the system reliability. This is a function of component reliability parameters and system structure. In the system maintenance phase, the importance measure is used to help the maintenance personnel identify the key components of the system, rationally allocate resources to the weak links, and improve the system reliability with the minimum life-cycle cost.
In this section, BIM and IIM of system reliability are introduced into the DRAS, so as to identify the system key components when the system performance decreases, determine the weak links of the system and pay more attention to them during maintenance, in order to improve the reliability of the whole life cycle of the system.
3.1. Introduction to BIM and IIM
BIM [
19] is the foundation achievement of reliability importance measure theory. It defines the influence degree of component reliability change on system reliability change:
where
is the structure function of the system such that
,
represents the state of component
i at time
t,
denotes the reliability of the system at time
t, and
is the reliability of component
i at time
t.
The IIM [
22] considers the influence degree of component state distribution probability and state transition rate on system reliability. It can quantitatively analyze the influence degree of component reliability change with state transition on system reliability. The IIM of component
i is given by:
where
is the failure rate of component
i at time
t.
The IIM of component i represents the change of system reliability per unit time when component i fails. This is proved in the sequel.
Assuming that the system is composed of
n components, the variation of system reliability per unit time is given by:
The change of reliability per unit time of component
i is expressed as:
According to Equation (13), the change of system reliability in unit time is equal to the sum of IIM of n components at time t. By computing the relative values of BIM and IIM of each component in the system at a certain time, the ranking of the impact of each component on the system reliability can be obtained. This can provide a theoretical guidance for maintenance personnel.
3.2. Changes in BIM and IIM of Components in a Binary System
This section deals with the representation of BIM and IIM in a binary system. The binary representation of BIM is deduced as follows. When the system is running, that is,
, the BIM of component
i is expressed as:
where
is the component reliability vector,
represents the system structure function, and
denotes the state vector of component
i.
When the system fails, that is,
, the BIM of component
i is given by:
Therefore, the BIM of component
i is defined as:
where
represents the maximum potential for system reliability improvement by improving the reliability of component
i, and
denotes the importance of component
i failure to system failure.
For
n independent components, BIM can be expressed as the expectation of system performance changes before and after the failure of component
i [
18]:
It is clear that for a coherent system with , and the reliability of each component is (0, 1). It can be seen from Equation (17) that the importance of component i to system reliability is determined by the increase of system reliability as component i improves.
The IIM of a binary system can be expressed as:
Equation (18) expresses the mathematical expectation that changes in the reliability of component
i lead to system reliability changes. The proof is given by:
The derivation of the reliability of component
i can then be obtained:
The reliability and failure rate of component i are and .
It can be deduced from Equations (17) and (20) that BIM and IIM in a binary system, have the following relationship:
It can be seen from Equation (21) that IIM not only considers the influence of the component state distribution probability and component state transition probability on the system reliability, but also considers the reliability and failure rate of the component itself, which is an improvement of BIM.
By comparing BIM and IIM, the two importance measures can be applied to DRAS, in order to identify the weak links and pay attention to them in the maintenance process. This improves the reliability of the system’s life cycle.
4. Case Study for DRAS
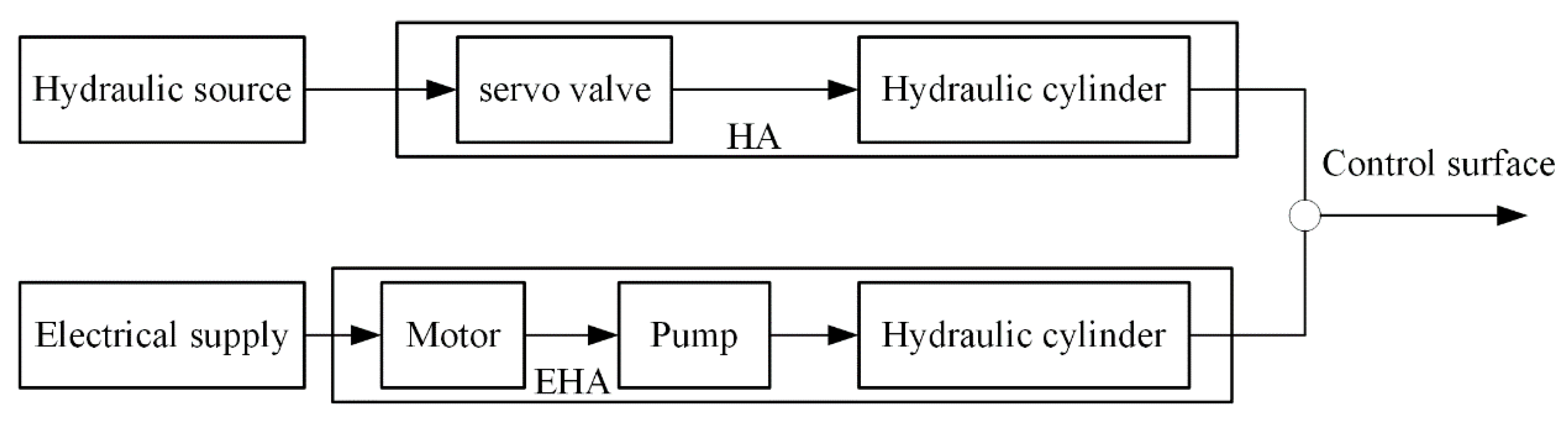
In this section, BIM and IIM are applied to DRAS. DRAS consists of a hydraulic actuation system (HAS) and an electro-hydrostatic actuation system (EHAS). The HAS uses a hydraulic source (HS) to move the control surface, while the EHAS uses an electrical supply (ES) to provide the motion force. The HAS is mainly composed of a servo valve and a hydraulic cylinder, while the main components of the EHAS are a motor, pump and hydraulic cylinder. The reliability of these components together determines the reliability of DRAS. The logic block diagram of DRAS is illustrated in
Figure 2.
Fatigue and wear are inevitable due to the long time running of the components. They lead to the degradation of the performance of the components. It is assumed that the performance degradation of these components follows an IG process. It can be seen from
Section 2 that the reliability of each component with time is affected by the drift parameter (
) and the variance coefficient (
). The degradation parameters and failure thresholds of the key components in DRAS are presented in
Table 1, where some parameters are adopted from references [
30,
31,
32,
33] and others are based on typical and engineering experience values.
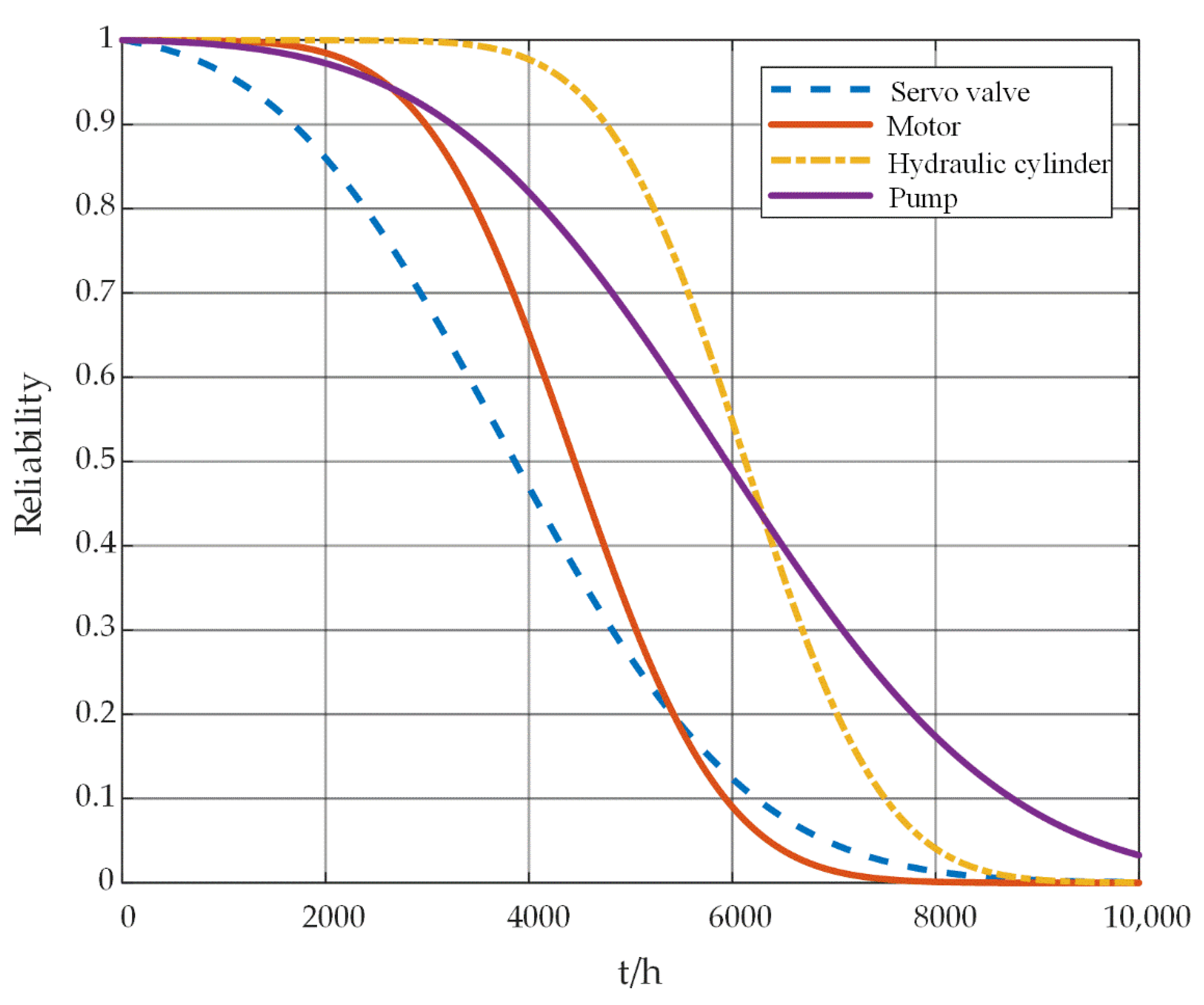
Through this analysis, the reliability of the key components in DRAS is obtained over time (cf.
Figure 3).
Figure 3 presents the reliability of the key components in DRAS over time. It can be seen that the reliability of each component is very high at the beginning. However, after a certain time of operation, the reliability of each component gradually decreases, and it is basically 0 at almost 8000 h. In addition, it can be deduced that the reliability of the servo valve is relatively low, while that of the hydraulic cylinder is relatively high. In general, when the reliability of a component is in the range of 0.55 to 0.65, it indicates that the component has a higher risk of failure. However, the maintenance of the DRAS is a decision made by comprehensively considering the conditions of each key component, so the maintenance time of the system is not simply determined by the reliability safety value of a certain component. Based on the derivation process of BIM and IIM in
Section 3, the BIM and IIM calculation equations of each component can be obtained. According to the logic block diagram in
Figure 2, the reliability function of the system is given by:
Therefore, the BIM of each component is expressed:
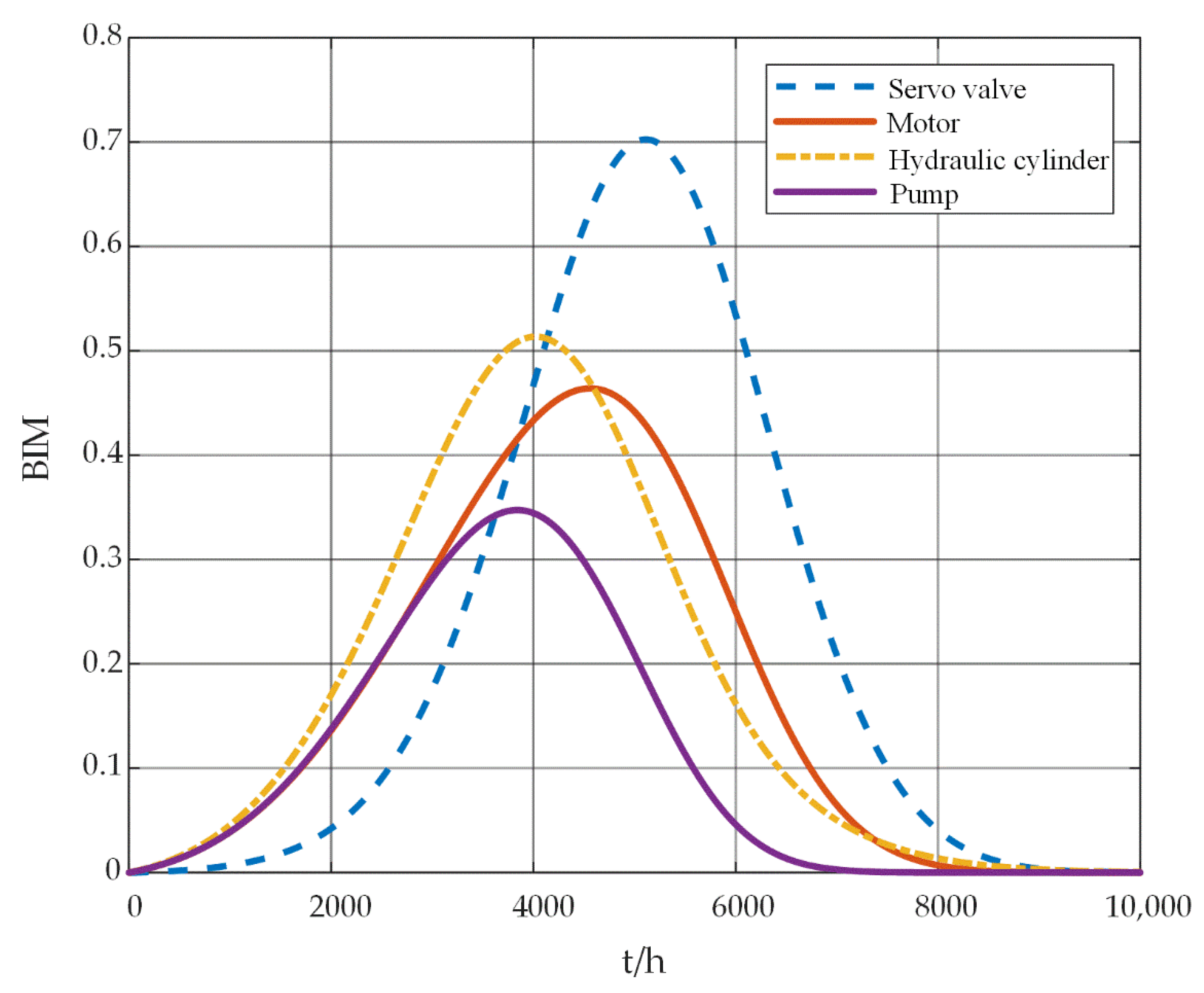
Based on these formulas, the change of BIM value of each component with time can be obtained (cf.
Figure 4).
Figure 4 presents how the BIM values of each component change over time. It can be seen that the BIM value of the components increases first, and then decreases with time. This is because the reliability of each component is too high in the beginning, which means that the importance measure of each component is low. As the system runs, the performance of each component decreases, its reliability decreases, and its importance gradually increases. In the later stage, the reliability of each component is very low. Consequently, the change rate of reliability of each component tends to 0. Therefore, the BIM value also tends to 0. It can be seen from
Figure 4 that BIM for the four components are hydraulic cylinders, servo valve, motor and pump, when the system is running for 4000 h. The BIM value of hydraulic cylinder is large due to the fact that hydraulic cylinders exist in both HAS and EHAS. When the hydraulic cylinder fails, the dissimilar redundancy driving control surface is affected, which results in DRAS failure. Therefore, the BIM value of the hydraulic cylinder is high. The reason for the higher BIM value of the servo valve is that the reliability of the servo valve is relatively low compared with other components (cf.
Figure 3). Thus, the importance of the servo valve is relatively high. Therefore, the hydraulic cylinder and servo valve have relatively large BIM values.
The IIM calculation of each component in the DRAS is given by:
And the failure rate of component
i is expressed as:
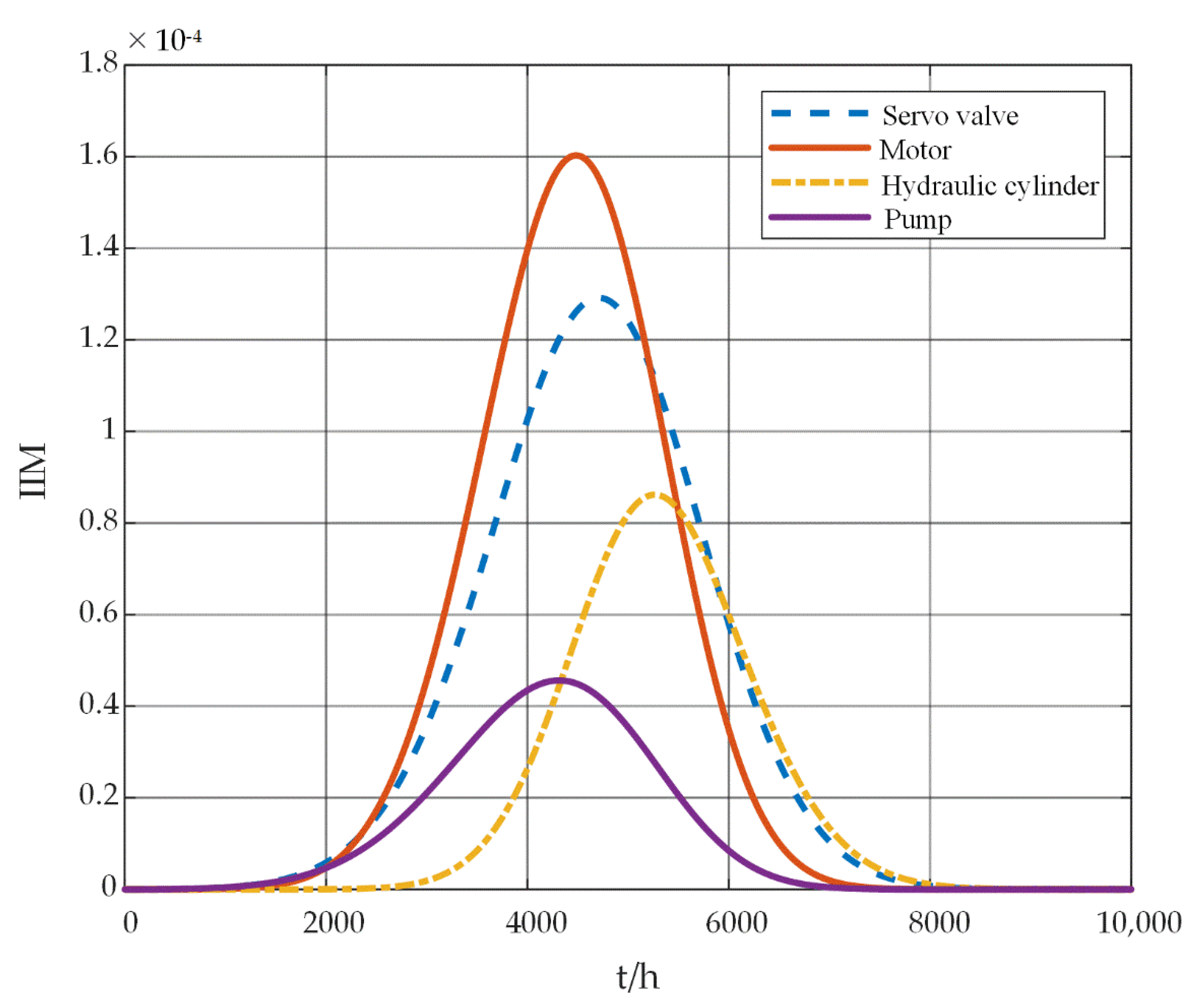
Therefore, the IIM value of each component changes over time, as shown in
Figure 5.
Figure 5 presents the change of IIM value of each component with time. It can be seen that the IIM value of each component first increases, and then decreases with time. This is because the reliability of each component is high, and the failure rate is low at the beginning. With the operation of the system, the reliability of each component decreases and the failure rate increases, and therefore the importance of each component increases. In the final period, the change rate of the reliability of each component tends to 0, and the importance of each component also tends to 0 after almost 8000 h. It can be seen from
Figure 5 that after 4000 h of operation, the IIM of each component is in order of motor, servo valve, pump and hydraulic cylinder. The reason for the large IIM value of the motor is that IIM considers the failure rate of each component. Therefore, the high IIM value of the motor may be due to the fact that the failure rate of the motor is higher than that of other hydraulic components, and therefore the IIM of the motor is larger. The IIM value of the hydraulic cylinder is lower at 4000 h, because the IIM is also related to the reliability of the component at the corresponding moment. It can be seen from
Figure 3 that the reliability of the hydraulic cylinder is relatively high compared to other components. Therefore, the reliability change rate of the hydraulic cylinder is relatively low compared to the system, and thus its IIM value is low. The criticality of the components at a certain moment can be determined by sorting the IIM value of each component, which provides a theoretical support for the maintenance strategy of the DRAS.
The sequence of component IIM values are selected when the system is running for 4500 h and 5500 h. They are then compared with BIM.
Table 2 presents the ranking and comparison of BIM and IIM values of each component in 4500 h. It can be seen that at 4500 h, the BIM value components are in the order of importance of the servo valve, hydraulic cylinder, motor and pump, while the IIM value components are in the order of importance of motor, servo valve, hydraulic cylinder and pump. It can also be deduced that IIM considers the failure rate of each component, because the failure rate of the motor is higher than that of other hydraulic components. Therefore, the motor ranks first in the ranking of IIM values. The order of the other components is similar to that of the BIM value.
Table 3 presents the ranking and comparison of BIM and IIM values of each component in 5500 h. It can be seen that the importance of BIM value components at 5500 h is the servo valve, motor, hydraulic cylinder and pump. The importance of the IIM value components is the servo valve, hydraulic cylinder, motor and pump. It can be seen that the IIM values of the motor and the hydraulic cylinder are very close at 5500 h. Therefore, it is mainly similar to the order of the components in the BIM value. BIM and IIM are two different importance measures. Therefore, they have different priorities and consider different physical quantities. Consequently, it is understandable that the order of the other moments is not the same.
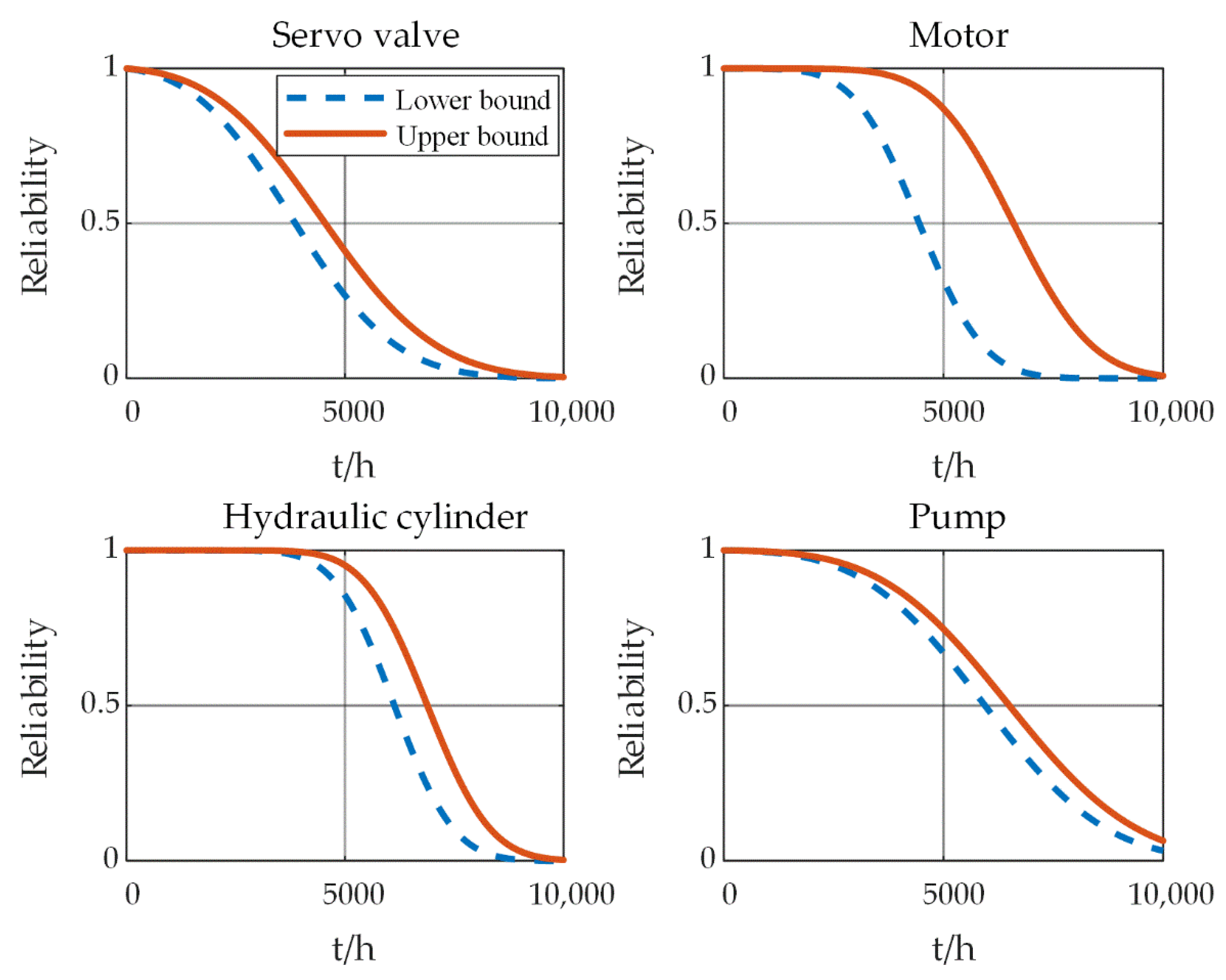
Figure 6 presents the upper bound and lower bound of system reliability changes, that are caused by the upper and lower bounds of component failure thresholds. It can be seen that the system reliability changes with time. As the reliability of the system decreases over time, a preventive maintenance should be timely performed. As can be seen from
Figure 6, the fault threshold interval of the motor has a great influence on its reliability. With the operation of the system, the reliability of the servo valve degrades faster, so its maintenance frequency needs to be increased, while the reliability of the hydraulic cylinder degrades relatively slowly, so its maintenance frequency can be relatively low. In general, when the reliability of a component is in the range of 0.55 to 0.65, it means that the component has a high risk of failure. However, the maintenance of the system is a decision made by comprehensively considering the conditions of each key component, so the maintenance time of the system is not simply determined by the reliability safety value of a certain component. In this case, the BIM and IIM methods can be used to identify the key components of the system at different times, in order to improve the reliability of the whole life cycle of the system, and reduce its maintenance cost.
In this paper, the reliability of key components in DRAS is modeled based on IG process. In addition, BIM and IIM are utilized to identify the weak links of the DRAS so that resources can be appropriately allocated to the weak links during maintenance. The proposed method can provide theoretical basis and practical application for the identification of key components and system maintenance under resource constraints. Reference [
24] uses joint integrated importance measure to identify key components in aircraft warning system and guide its maintenance, and the results shown are similar to this paper.


 ,
, 






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}