1. Introduction
Currently there are a large number of analytical and finite element models [
1,
2,
3,
4,
5,
6,
7] capable of reproducing the behavior of beams with accuracy and precision. Generally, finite element models demand a considerable computational cost depending on the analysis that is proposed and the meshing established by the user.
Regarding recent developments employing Timoshenko’s beam theory, ref. [
8] derived a non-local formulation using Timoshenko’s Theory and non-local elasticity, formulating the elasticity matrix using two parameters that combined the assumptions of Winkler and Pasternak. For their part, ref. [
9] used the Theory of Functional Connections (TFC) to solve numerical boundary value problems. The authors solved equations that govern the response of beams using the Timoshenko–Ehrenfest Theory, which incorporates transverse shear strains.
To solve Timoshenko beams with nonlinear behavior at both geometric and material levels, the authors of [
10] developed a formulation that directly applied three-dimensional nonlinear constitutive equations without zero-stress conditions. The researchers compared the results with those obtained by applying brick-type elements, managing to verify the precision and efficacy of the formulation. In another recent work, the authors of [
11] incorporated interpolation functions in the Timoshenko 3D beam solution, which were obtained directly from the solution of the equilibrium differential equation of an infinitesimal deformed element, thus reducing the discretization of elements used. The interpolation functions were used in the definition of the tangential stiffness matrix in an updated Lagrangian formulation. The formulation was used to solve various three-dimensional examples with elements using different bending theories, including Timoshenko’s, achieving accurate prediction of results with minimal discretization.
To simulate the rotation phenomenon of a Timoshenko beam with different slenderness ratios, the authors of [
12] implemented a 3D finite element formulation. The novelty introduced in the finite element consisted of correctly considering the moment of inertia under small rotational deformations around the equilibrium position. The authors carried out various numerical simulations that allowed them to compare the effectiveness of the formulation against commercial finite element programs. The dynamic response of Timoshenko beams has also been studied by the authors of [
13], who studied perforated beams under accelerated loads in a variable thermal environment. The equations of the system have been solved numerically by means of implicit integration in time. The results obtained show correspondence with respect to the results obtained by applying conventional methods.
Another important phenomenon is the one involving lateral-torsional buckling in steel beams subjected to high temperatures. To study it, the authors of [
14] have used a formulation based on Timoshenko beam-type finite elements, thus avoiding using shell-type elements that transform the problem into a much more complex and computationally expensive one. They implemented two strategies: the first one corresponded to a fiber-based beam model (FBM) and the second one corresponded to a cruciform frame model (CFM). The results obtained from the numerical simulations show an adequate reproduction of the local buckling using a reduced computational time, which represents a promising projection towards the performance-based design of this type of beam when subjected to the action of fire.
In another recent study, this time focused on the dynamic response under moving loads of fiber-reinforced Timoshenko composite beams, the authors of [
15] used a Lagrangian procedure to determine the constitutive equations of motion accompanied by the use of the Ritz Method. The results obtained with the numerical simulations demonstrated the effectiveness of the formation, which, however, depends on the orientation of the reinforcing fibers and the volume fraction on the dynamic response of the models. Continuing with the Timoshenko beams, the authors of [
16] studied the effect of complex loads applied at multiple nodes. The authors used the inverse finite element method (iFEM) as a basic conceptual framework and Isogeometric Analysis (IGA) as a complementary strategy to update the shape of beams in two dimensions. Numerical simulations were compared against experimental results, indicating acceptable errors for deformations.
As for finite elements applied to structural members such as beams, there are no limits to modeling, including deformations in the cross section and in the longitudinal axis, while with analytical models, only beams that have specific formulations can be modeled at a low computational cost, limiting the types of analysis of non-deformable beams that can be carried out on their cross section, and their longitudinal axis can also be modeled at a low computational cost. Commonly, for buildings design, the cross section deformation is neglected, but when the analysis requires cross section deformation, or the steel reinforcement contribution for concrete beams, it is mandatory to evaluate it by using a finite element (FE) modeling or a fiber modeling.
Most of 3D FE are based on tethraedrons or hexaedrons, generally with 3 DOF each node, whose shape functions are generally linear (2 nodes per edge) or quadratic (3 nodes per edge); this means, for each polinomyal degree, an extra node is needed; with this formulation, the beam’s cross section and steel reinforcement can be modeled [
17,
18,
19,
20]. For 1D FE, generally the cross section is considered through the geometrical properties within the formulation, and 6 DOF per node for full axial, shear, and bending effects. When the formulation is treated as 1D, the effects of the reinforcement in concrete beams can be represented by transforming the steel reinforcement into concrete, due to the limitations of the formulation.
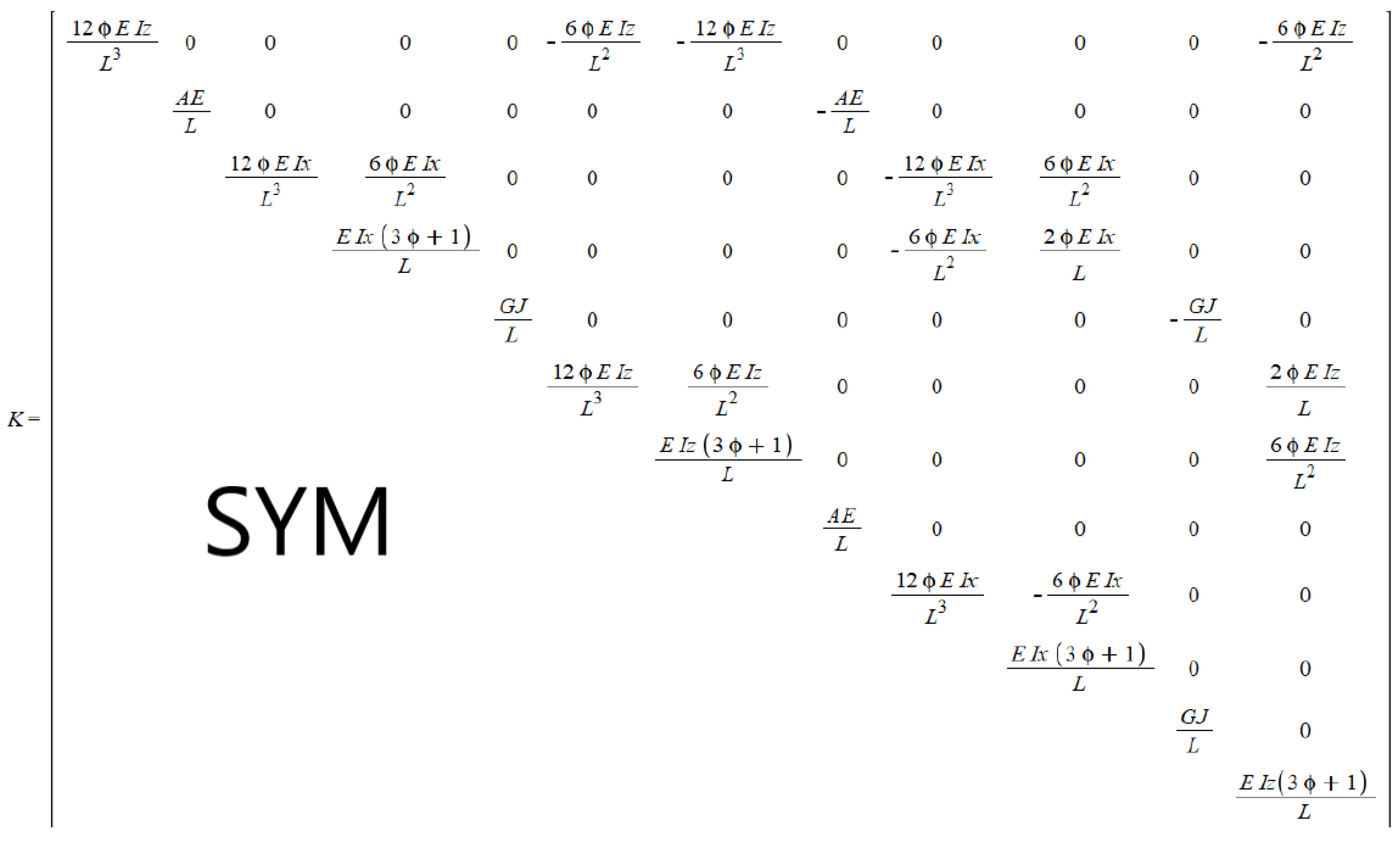
When beams are being formulated, with a 3D FE or 1D FE, it is necessary a formulation capable to capture the bending and shear effects; for a 3D FE, the bending and shear effects are obtained by the three main displacements of each node, with a quadratic shape function (minimum), due to the complexity of the formulation; for a 1D FE, the formulation is quite easy, with a full 6 DOF each node (axial forces, shear forces, and bending moments). There are two main theories for beam formulation: Bernoulli’s formulation, which neglects the shear deformation (valid for small beams in heigth), and Timoshenko’s Theory, which considers the shear deformation (valid for all types of beams) [
21,
22,
23,
24,
25,
26].
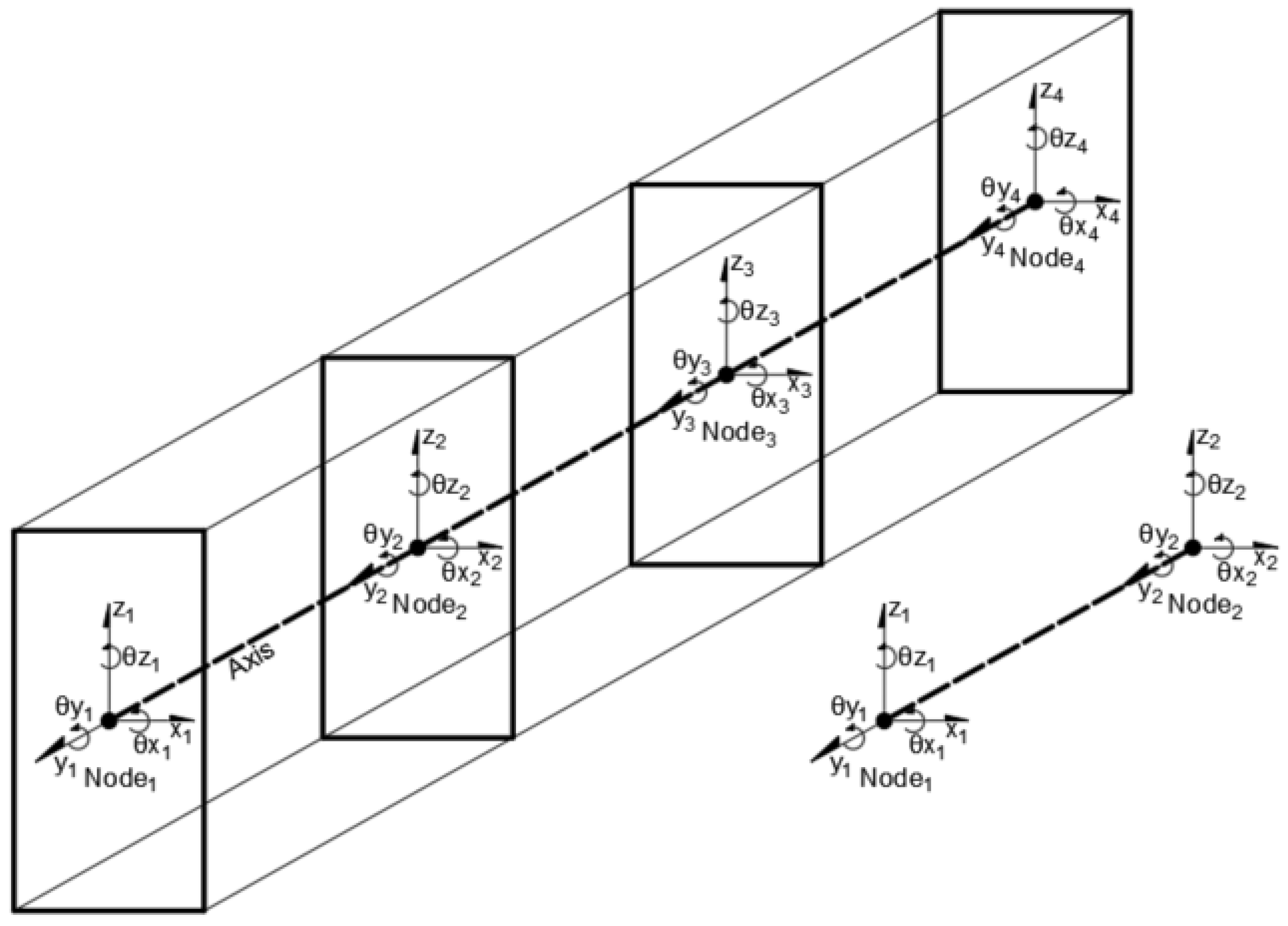
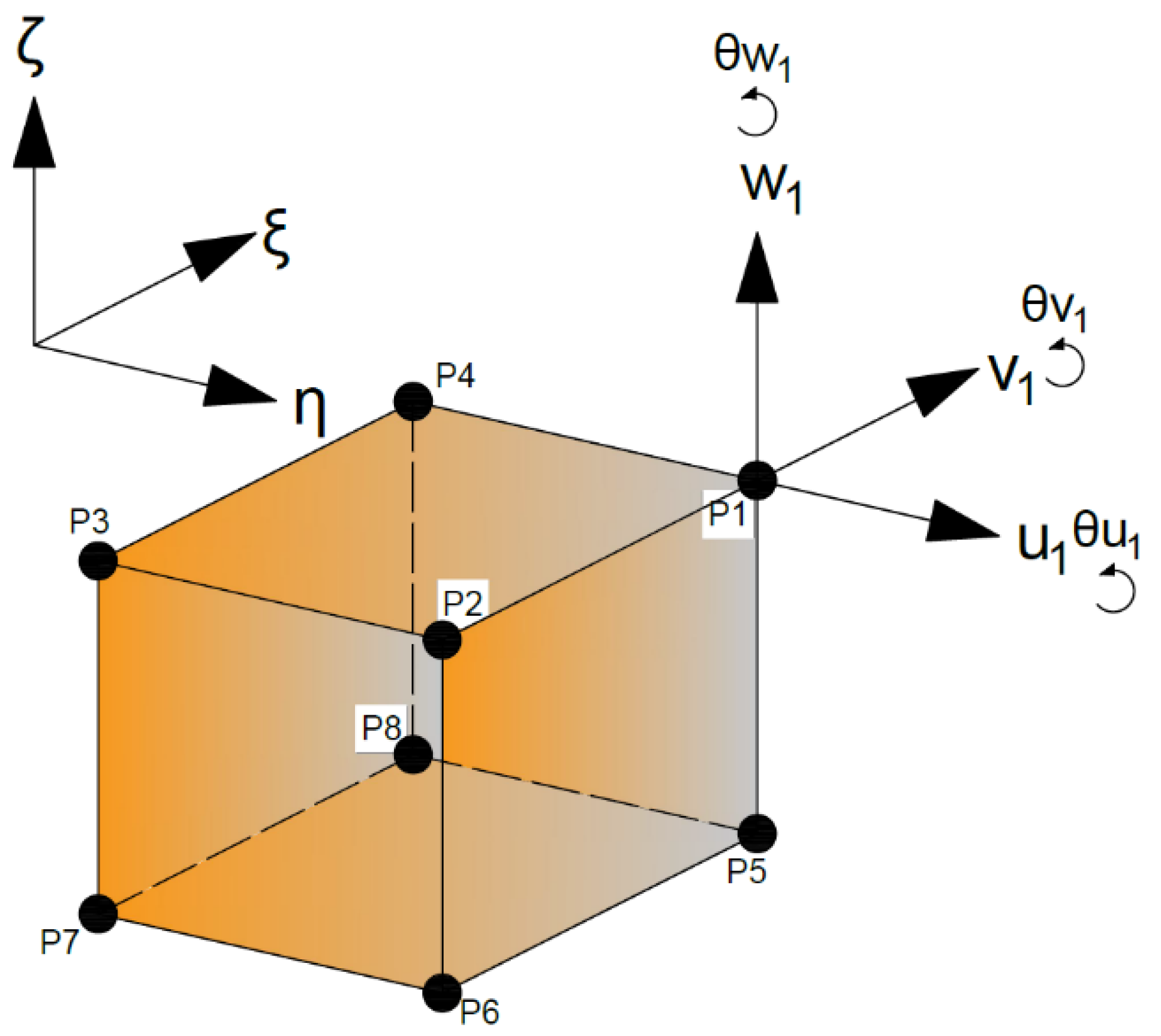
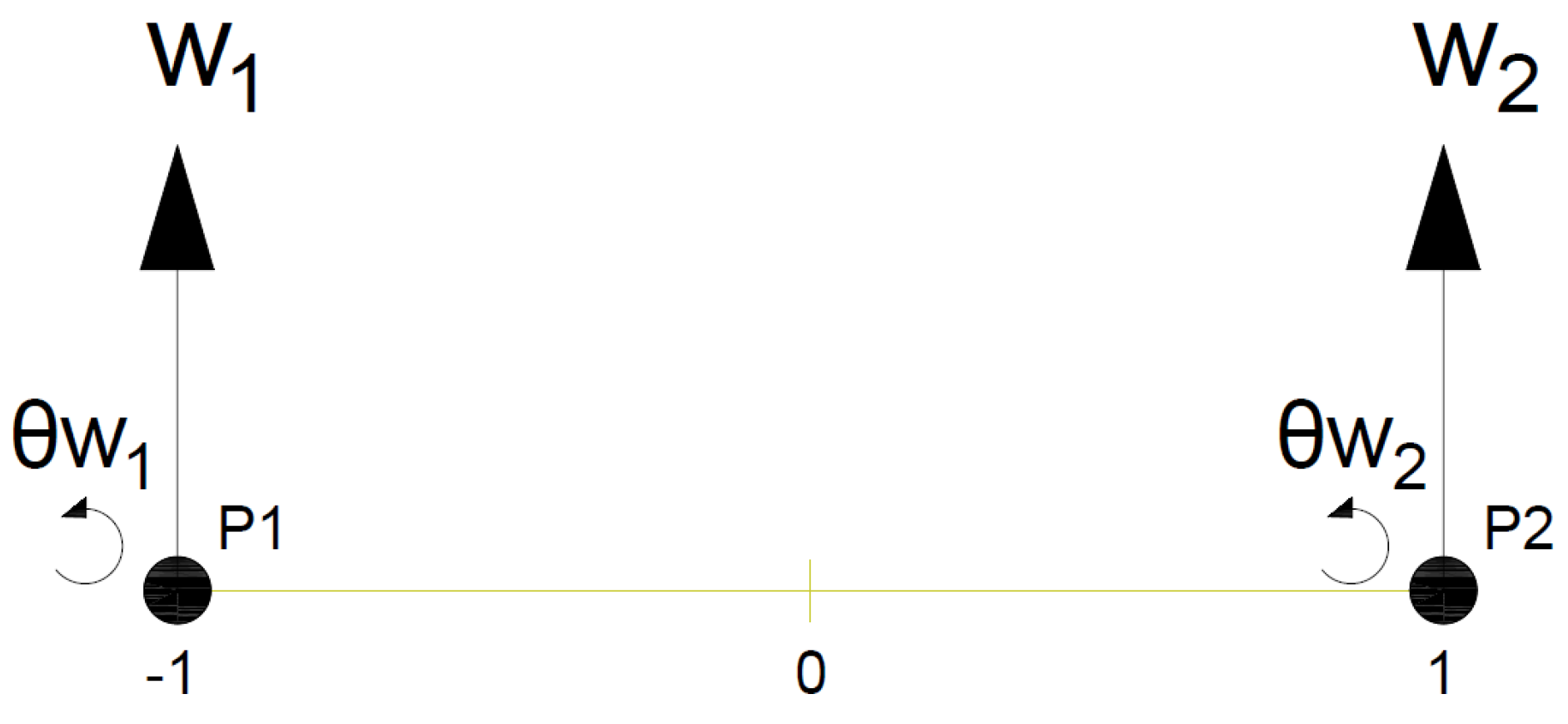
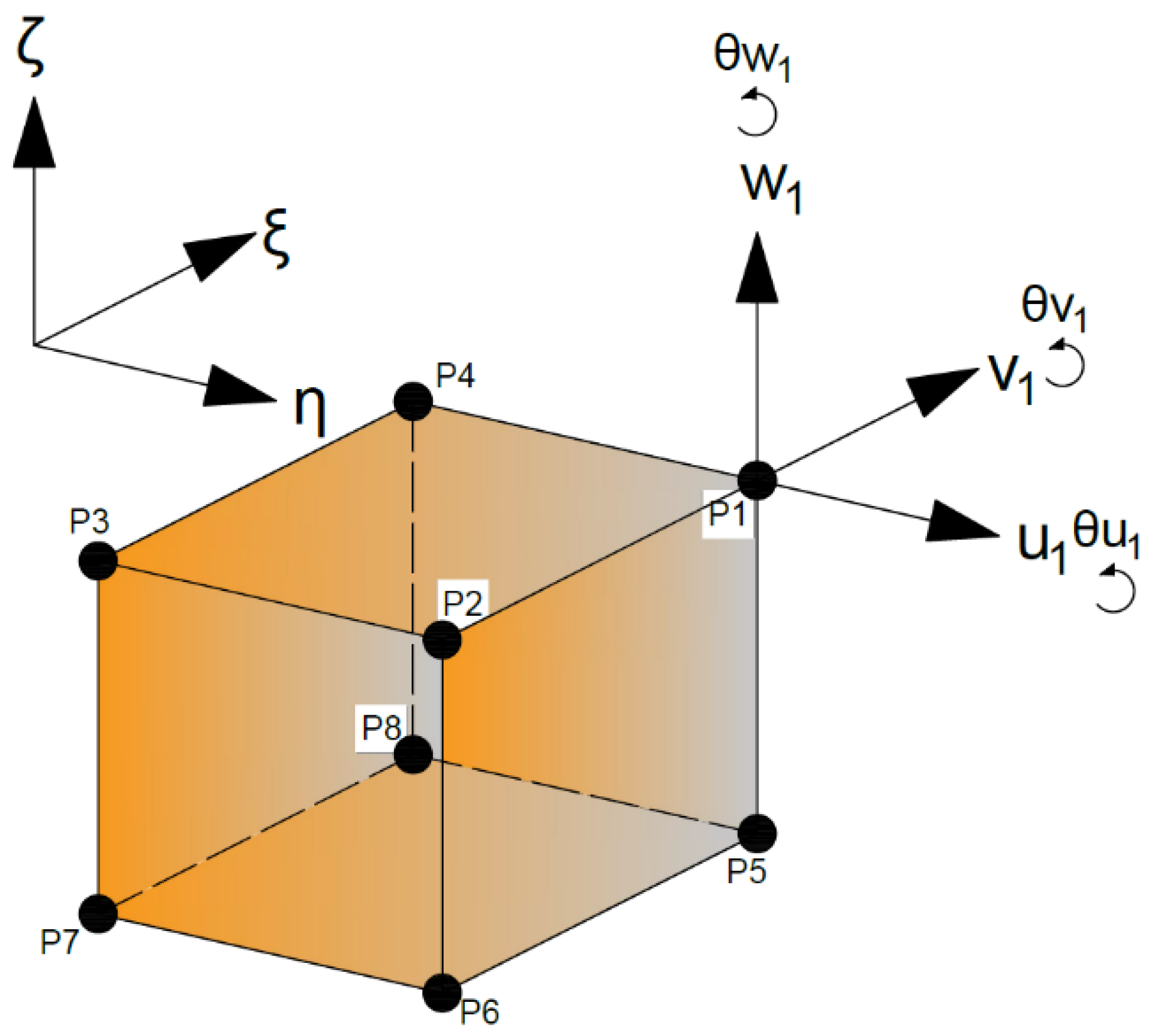
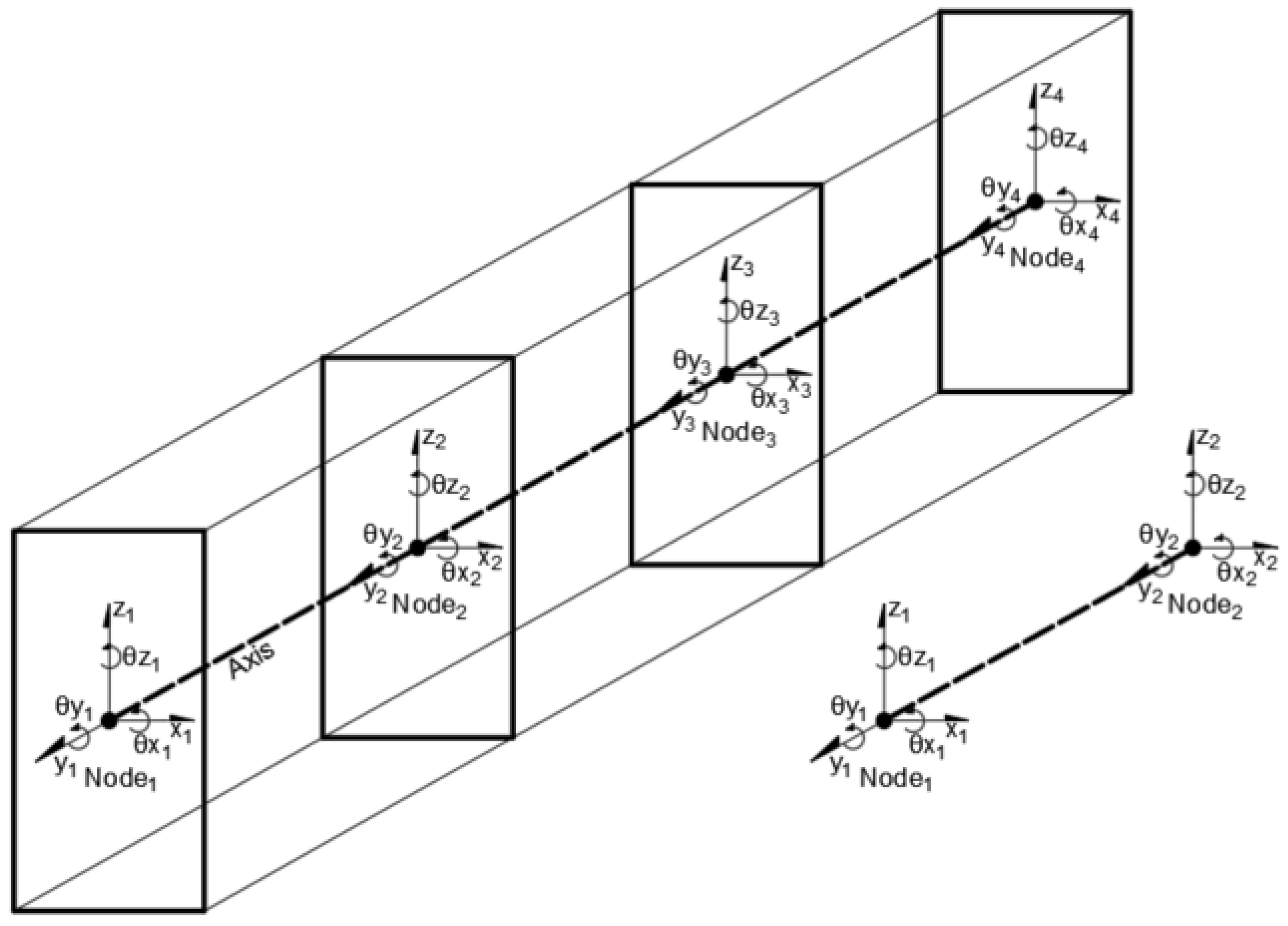
In this article, an Hexa 3D 8-node (48 DOF per element) and a 1D 2-node (12 DOF per element) will be developed, both based on their weak formulation and the Hermitian interpolation.
4. Discussion
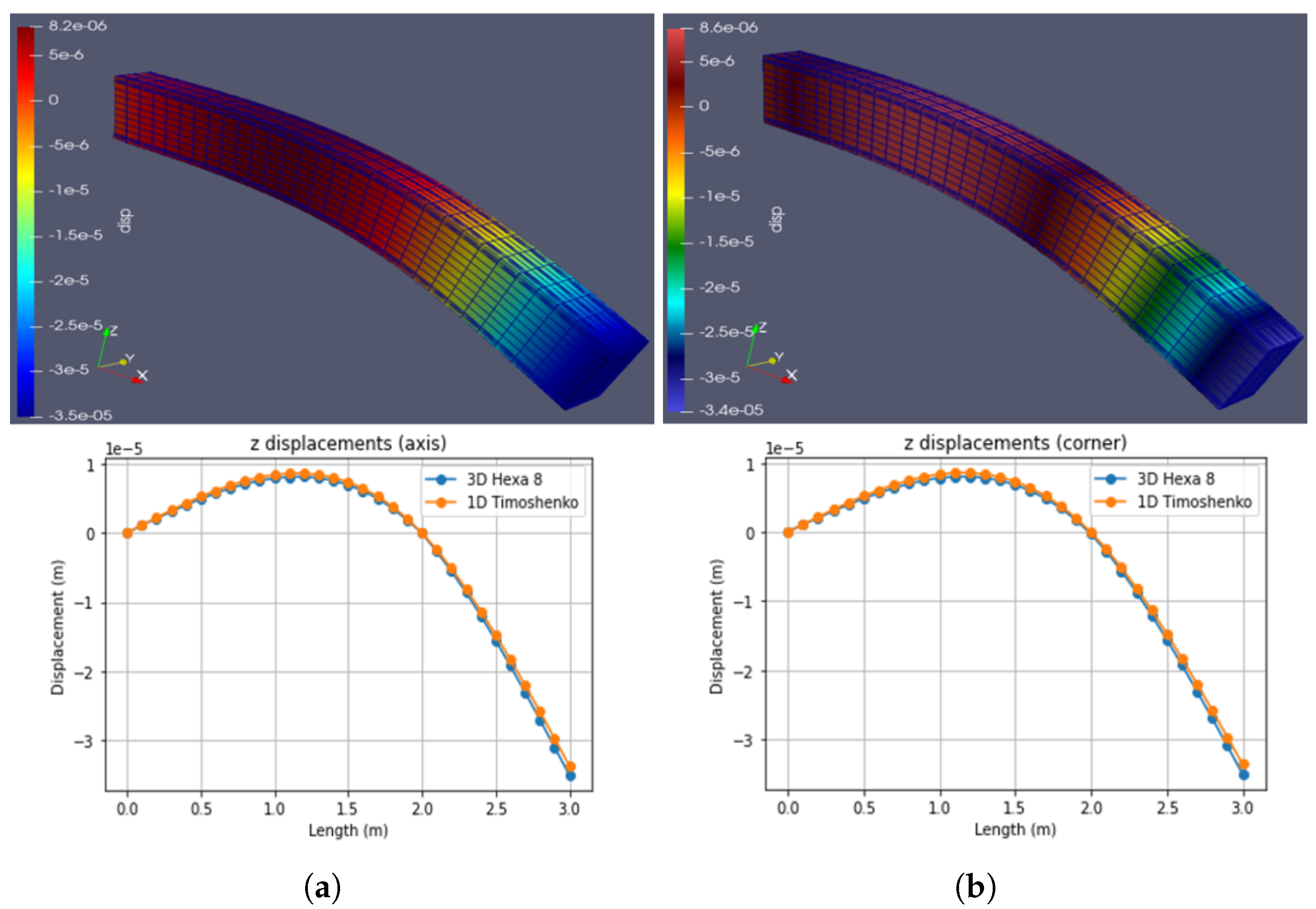
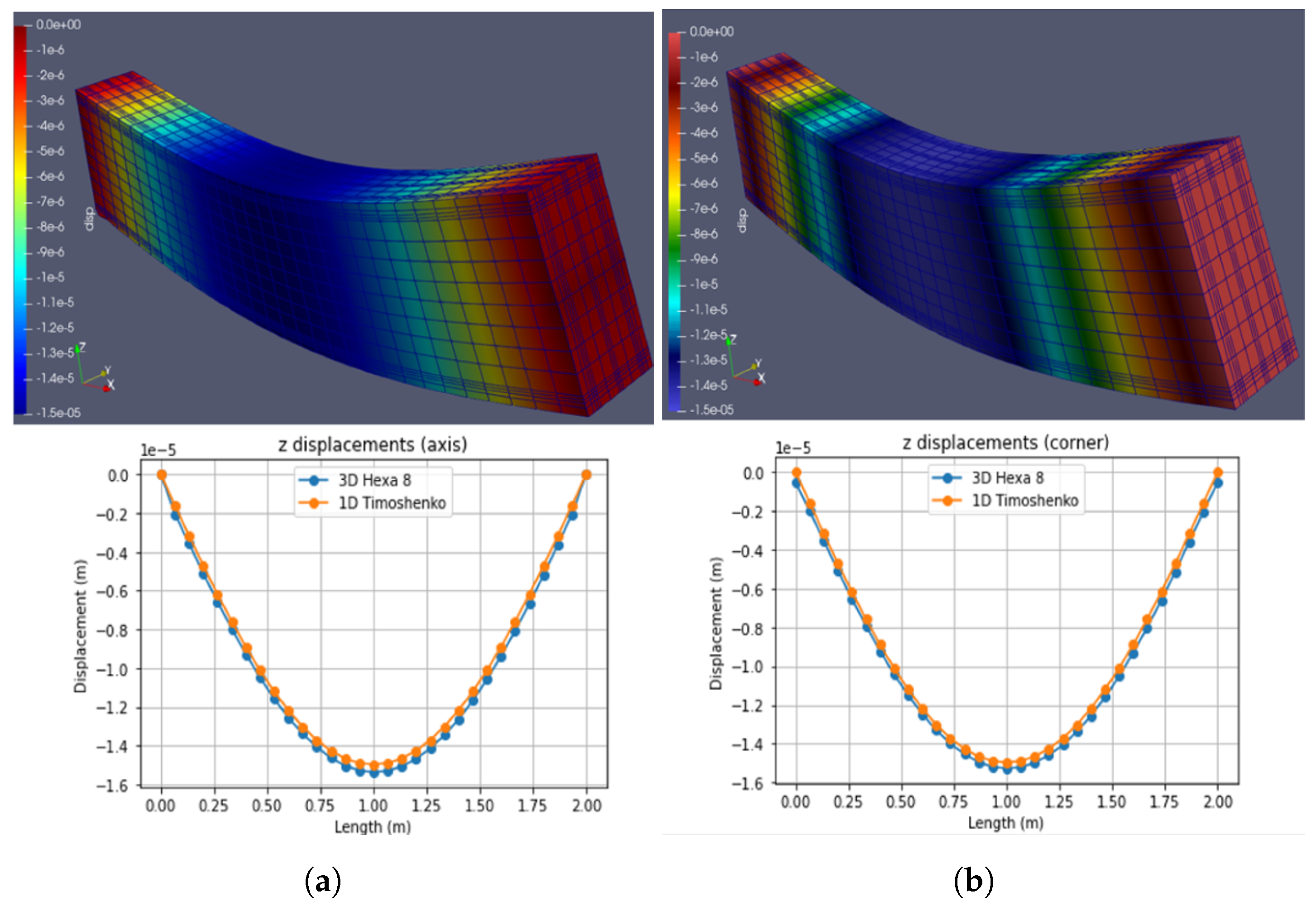
According to the results obtained, it is possible to affirm that although the results appear to be satisfactory for the structural element under Timoshenko’s theory, the error calculated in relative terms is high in some cases. In this paper, two different FE were created and evaluated, with expected results: the Hexahedral FE with 8 nodes performed better that the 1D FE Timoshenko beam formulation. In comparison, the axis displacements were relatively close, but the deformed cross section were not, essencialy with torsional effects.
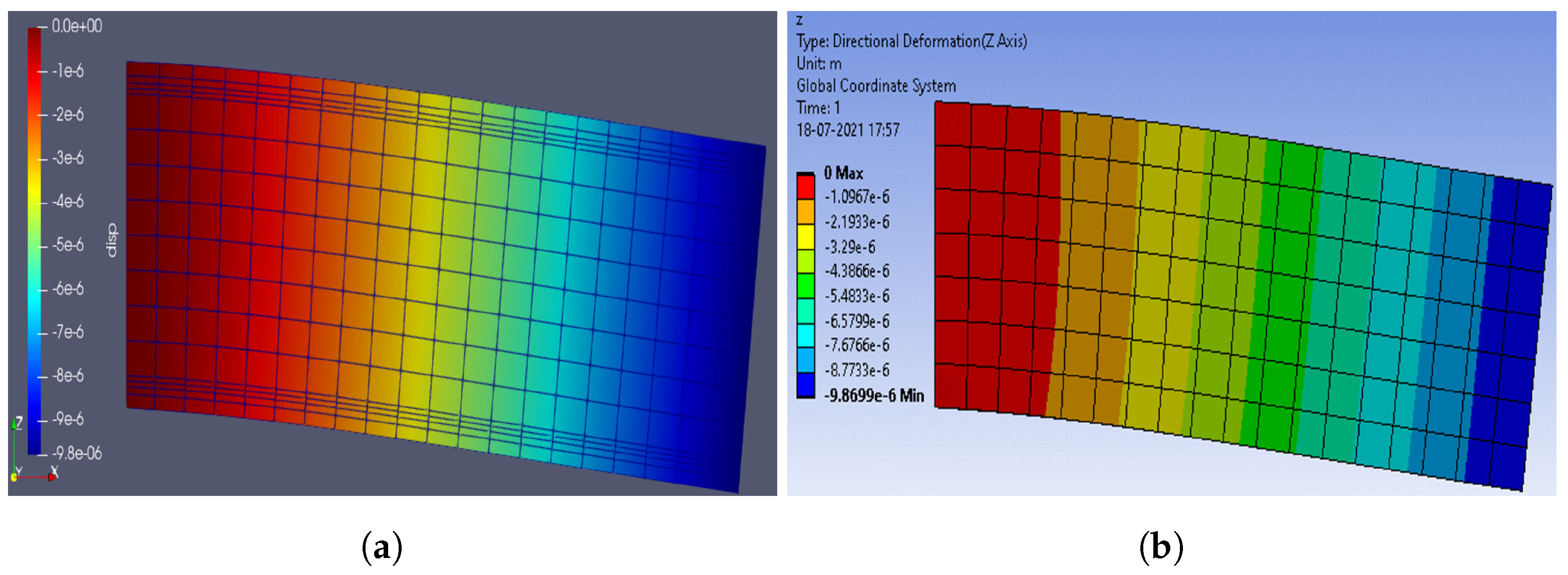
In the case of the beam embedded at one end, it is observed that in the first case (
Table A2), the error is
on average, while for case 2, the error remains quite low, at
, and for the torsional case, the values again increase to
on average, which can mean important changes in the design of structures susceptible to displacement, by underestimating the maximum deflections; however, the behavior of the cross section in all cases is similar, and in addition to this, when observing the results just at the maximum length (
m), where the maximum deflection occurs, the error is low, being the lowest of the entire table in cases 1 to 3; therefore, from the point of view of maximum deflections, the error is low.
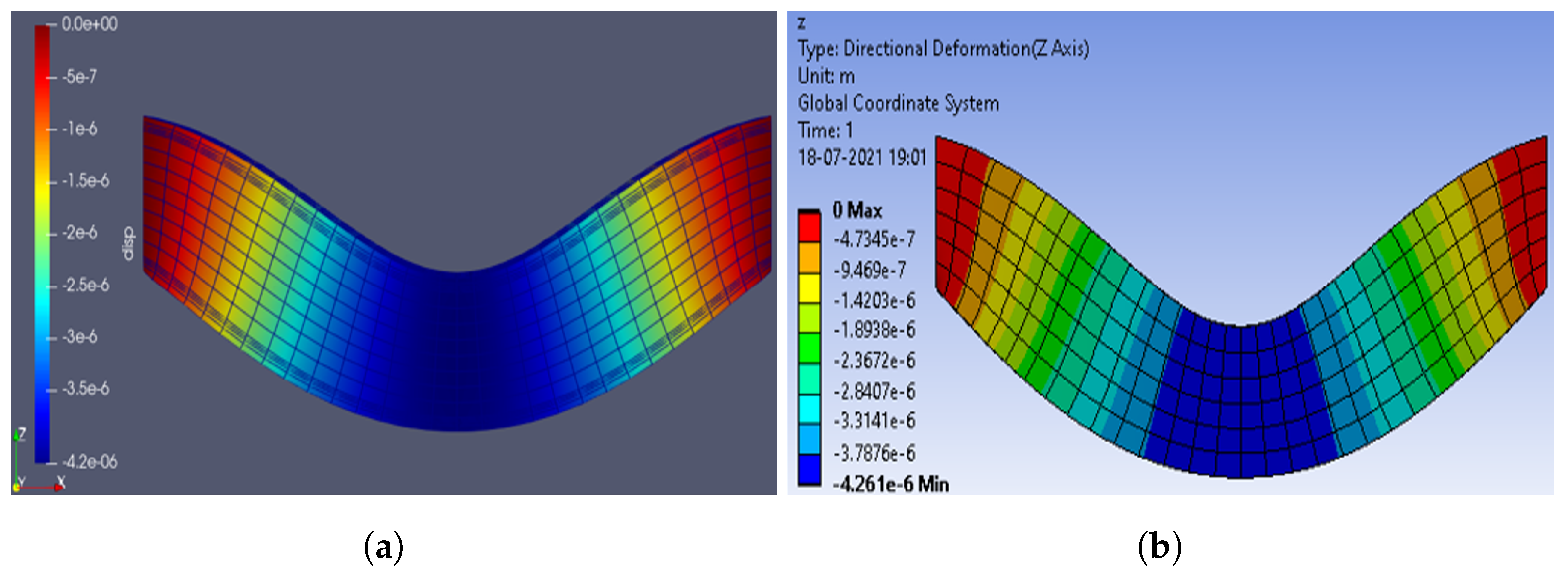
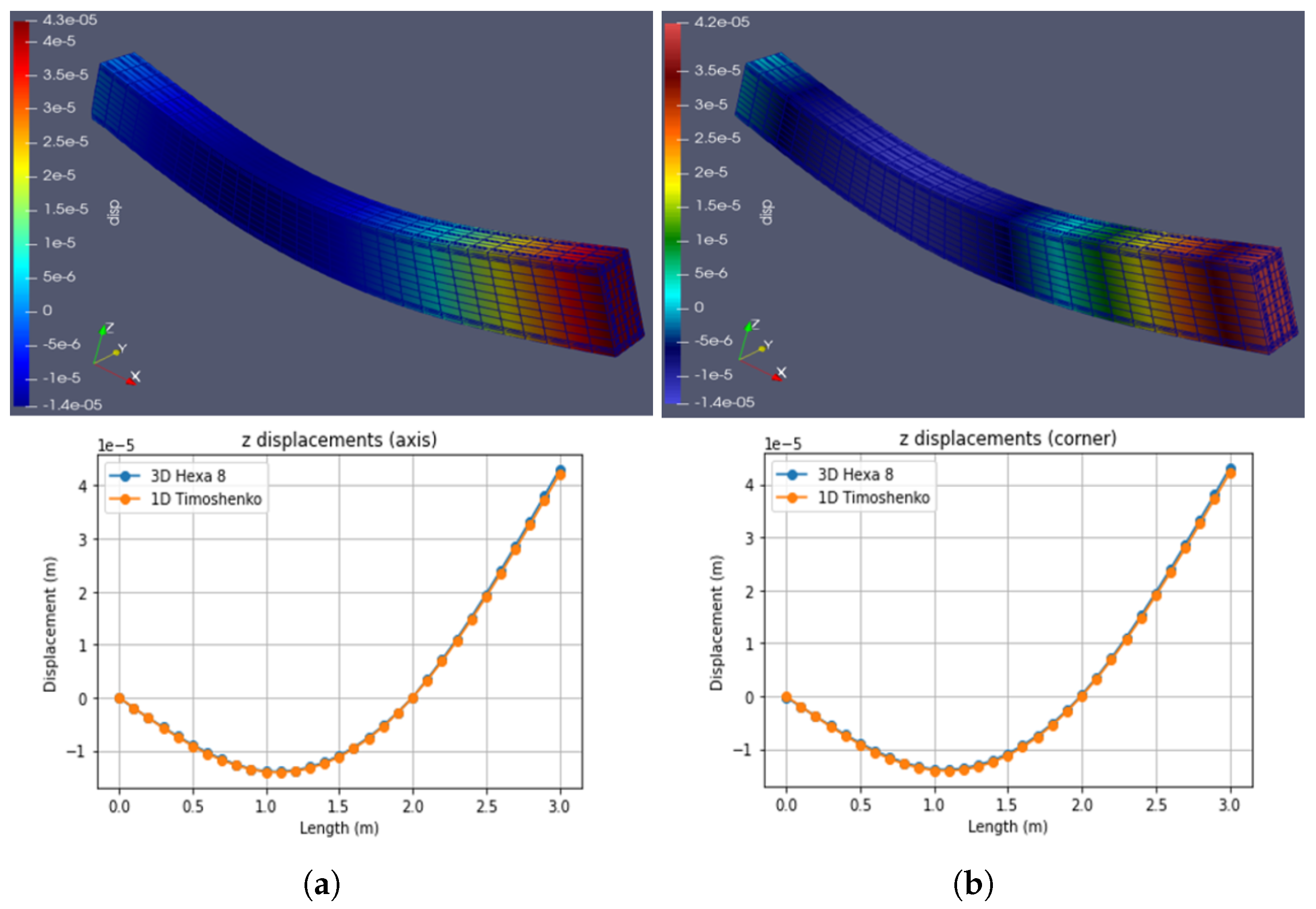
In the case of the beam articulated at both ends, it is observed that according to the
Table A3, the error for case 1 is low, at
, while the error for case 2 increases to
, and in the case of torsion, it continues to increase to approximately
, again, this can cause important changes in structures susceptible to displacement. Moreover, the same behavior is presented, so that the error values at the maximum deflection point (
m) are the lowest; so, an estimate of deflections is quite close.
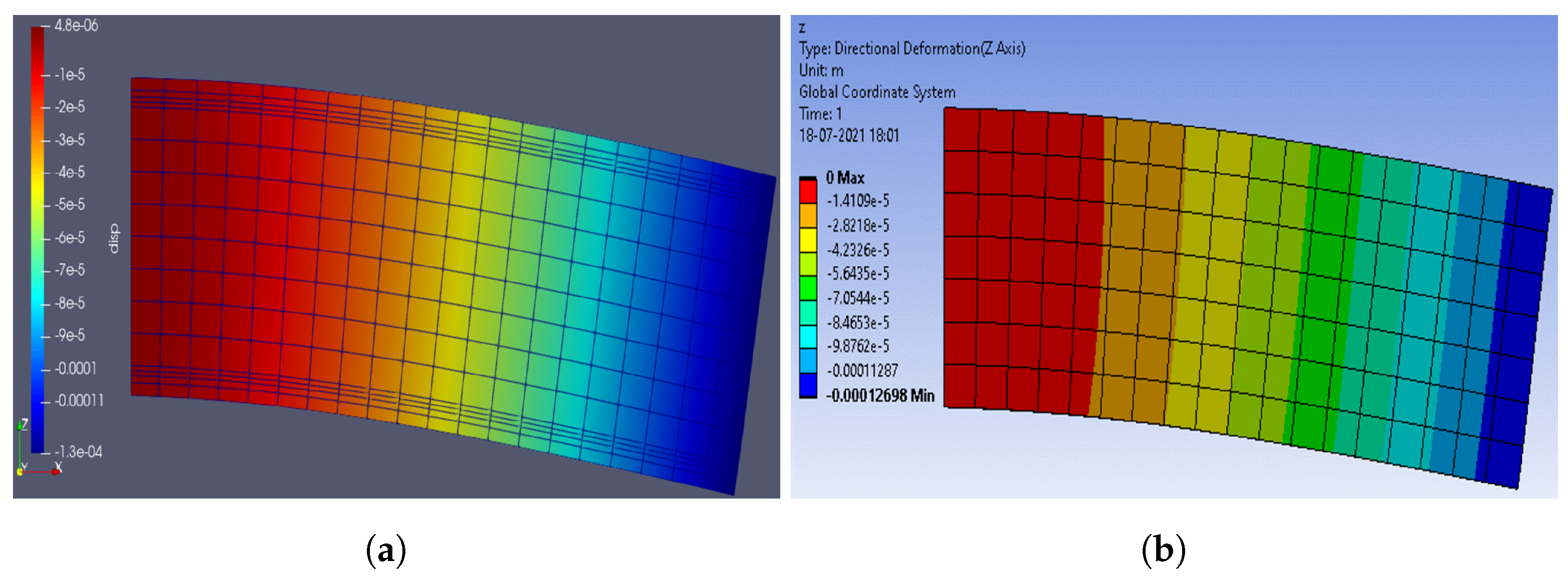
Something similar happens with the cantilever beam (
Table A4), observing high average percentages in cases 1, 4, 5, and 6, but not in cases 2 and 3; in case 1, it is observed that in the section between
m and
m, the lowest error occurs in the zone of maximum deflection, and in the same way in
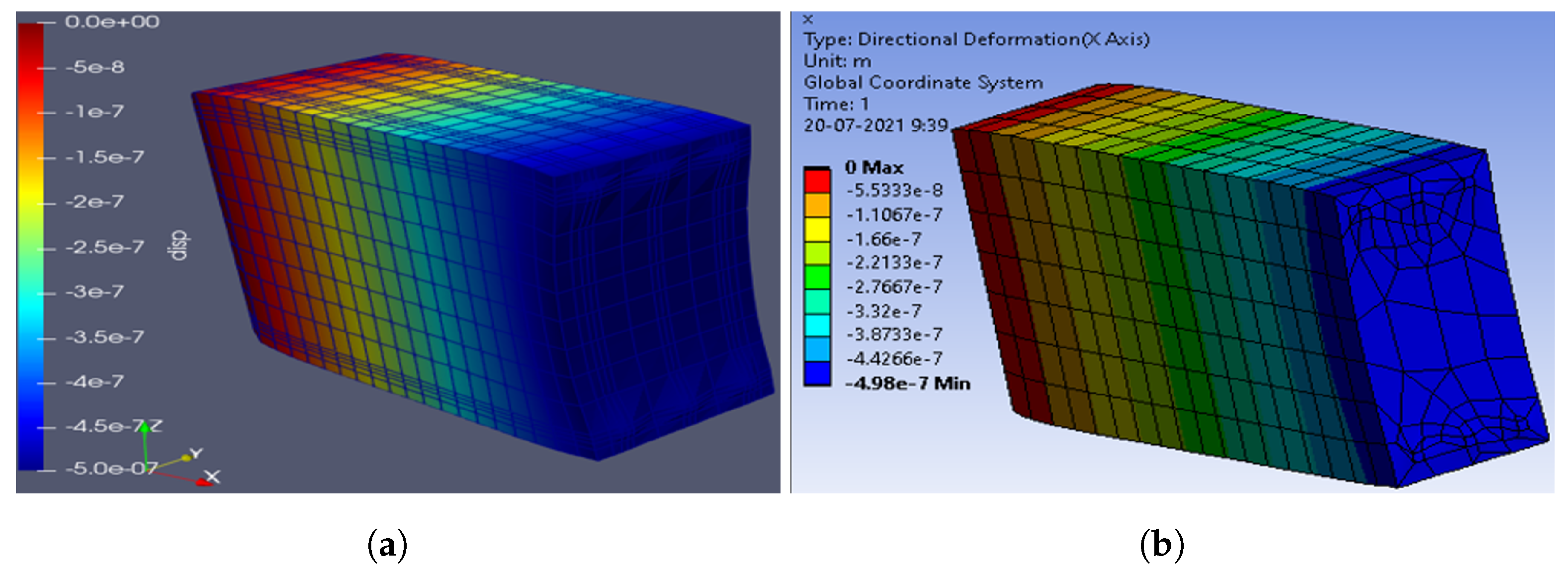
m, but the error is high in absolute terms. For cases 2 and 3, the behavior is the same, with a lower error value, so it can be considered acceptable. With respect to the other cases, the error has been calculated without taking into account the values of 100 because this comes from the way in which the degrees of freedom of both models are restricted, showing that for the FE model, there are some displacements that are translated between sections, while in the Timoshenko model, the displacements are restricted on the axis and no deformation is transmitted to the cross section.
5. Conclusions
As a conclusion, it can be established that the finite element 3D Hexa 8 created with Hermite polynomials accurately represents the results of the simulations when compared with a commercial software, with the disadvantage that when implemented in Python–Cython, the computation times are quite high. This finite element 3D Hexa 8 has the advantage to represent the rotations of the nodes with the translation and rotation component, which is the correct way to represent the real behavior of an element submitted to axial, bending and shear forces, in comparisson with some finite elements which the rotations are based only on the translations of each node.
The FE 3D formulation for the hexahedron was easy to formulate with third degree Hermitian polynomials due to the number of equations nedded for representing bending effects and adding the corresponding DOF for rotation, in comparison with common formulations. The proposed FE is based on hermitian polynomial interpolation, which considerably reduces the quantity of nodes in the hexahedron element and catches the bending effect more accurately by adding three additional DOF of rotation for each node. Rotations in common FE are caught by adding more nodes in the hexahedron and can include three or more nodes for each Edge, with 3 DOF for each one but only in translation, and rotations are calculated based on the translations.
It is also well known that the addition of rotations of DOF using hermitian polynomial interpolation is used for beam formulation (similar to the Timoshenko beam formulation presented in this paper) and for plates, which work with the axis of the structural element, but in this paper, the using hermitian polynomial interpolation is used directly in the FE formulation, in order to reduce the quantity of nodes and add three more DOF for rotations.
The advantage of this FE could lie in the processing time, but it depends because for a common FE formulation, there has to be a minumum of 16 nodes in order to correctly catch the bending effect (which is not very precise, because the polynomical order is barely 2), generating 48 equations per element, so the number of equations increases, but, using the Hexahedral FE with eight nodes, the number of equations is the same (48) per element but the order of the interpolation is 3 (used in this paper), not 2, so, with a common FE formulation (3 DOF per node) there will need 24 nodes, generating 72 equations per element, and it will always catch the rotations based on the translations. Based on the paragraph above, the advantages of using an FE lie in accuracy obtained by adding three additional DOF for rotations.
With respect to the Timoshenko simulations, it is observed that the results oscillate between high and low for the different beams in the different cases, so it is recommended to continue with the development until a better approximation is achieved in terms of deflections. One of the possible causes of these differences is the way in which the restrictions are carried out since by EF, these are carried out on a surface or on a line, while by the Timoshenko simulation, they are carried out at a point on the shaft, and this might make a difference.
In some cases, the Timoshenko simulations and the finite element 3D Hexa 8 matched almost perfectly, which implies that for academic purposes, it is possible to use the total section deformed shape based on the axis deformations, and by applying some trigonometric relations.
The accuracy of the finite element model must obviously be contrasted with the experimental results carried out on beams with geometry and mechanical characteristics similar to those used in this work.

 ,
, 



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}