
Symbolic Regulator Sets for a Weakly Nonlinear Discrete Control System with a Small Step

Abstract
:1. Introduction
2. An SDRE Approach for Small Step Discrete Control Systems
2.1. Asymptotic Expansion of the Discrete Riccati Equation Solution
- 1.
- All eigenvalues of the matrixare inside the unit circle, whereis a positive definite solution to Equation (10).
- 2.
- Solution of (9) exists, is unique and the following estimate for the remainder of the second-order asymptotics is valid (the L2 norm is used):
2.2. Symmetrization
3. Discrete One-Point Padé Regulator
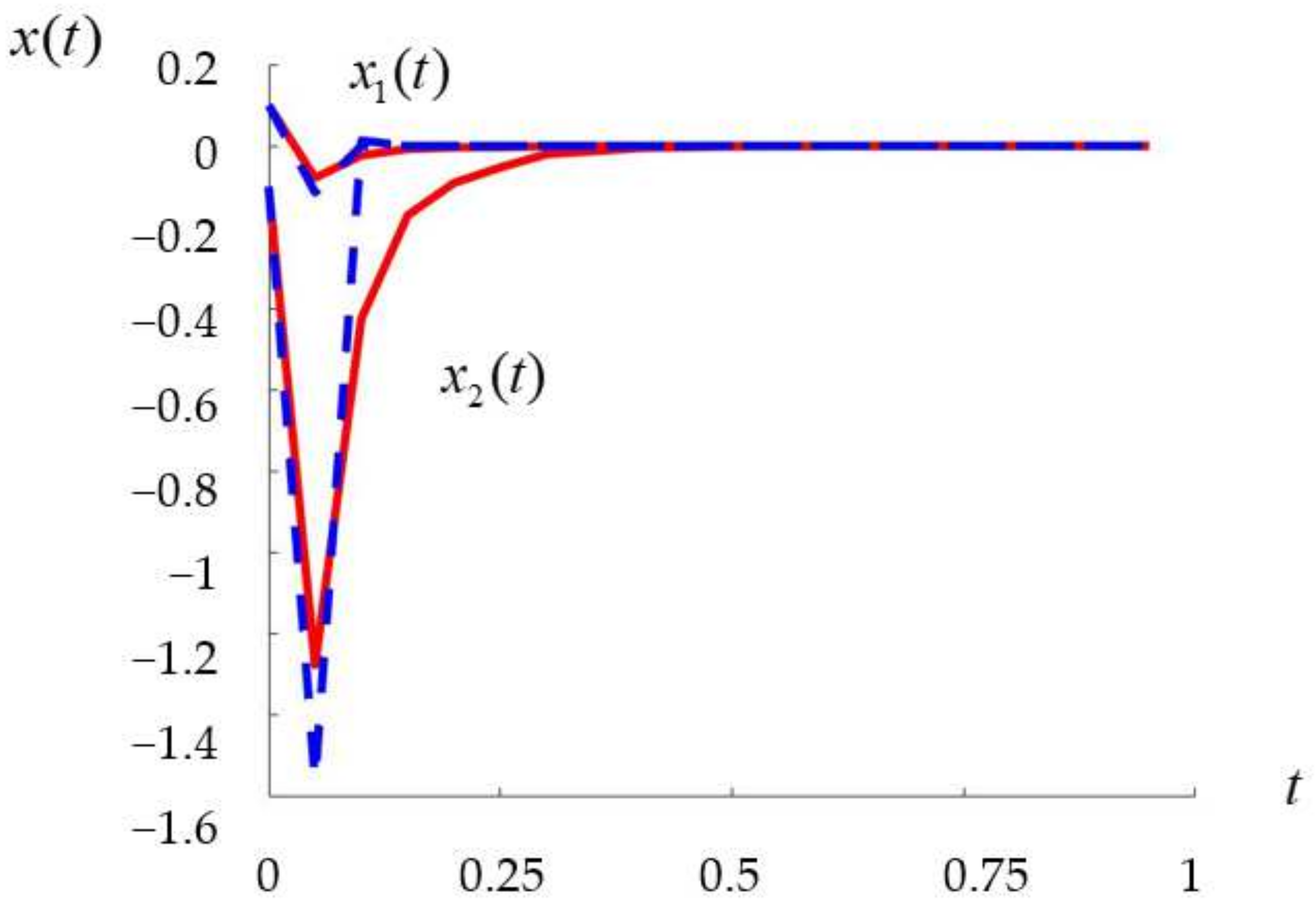
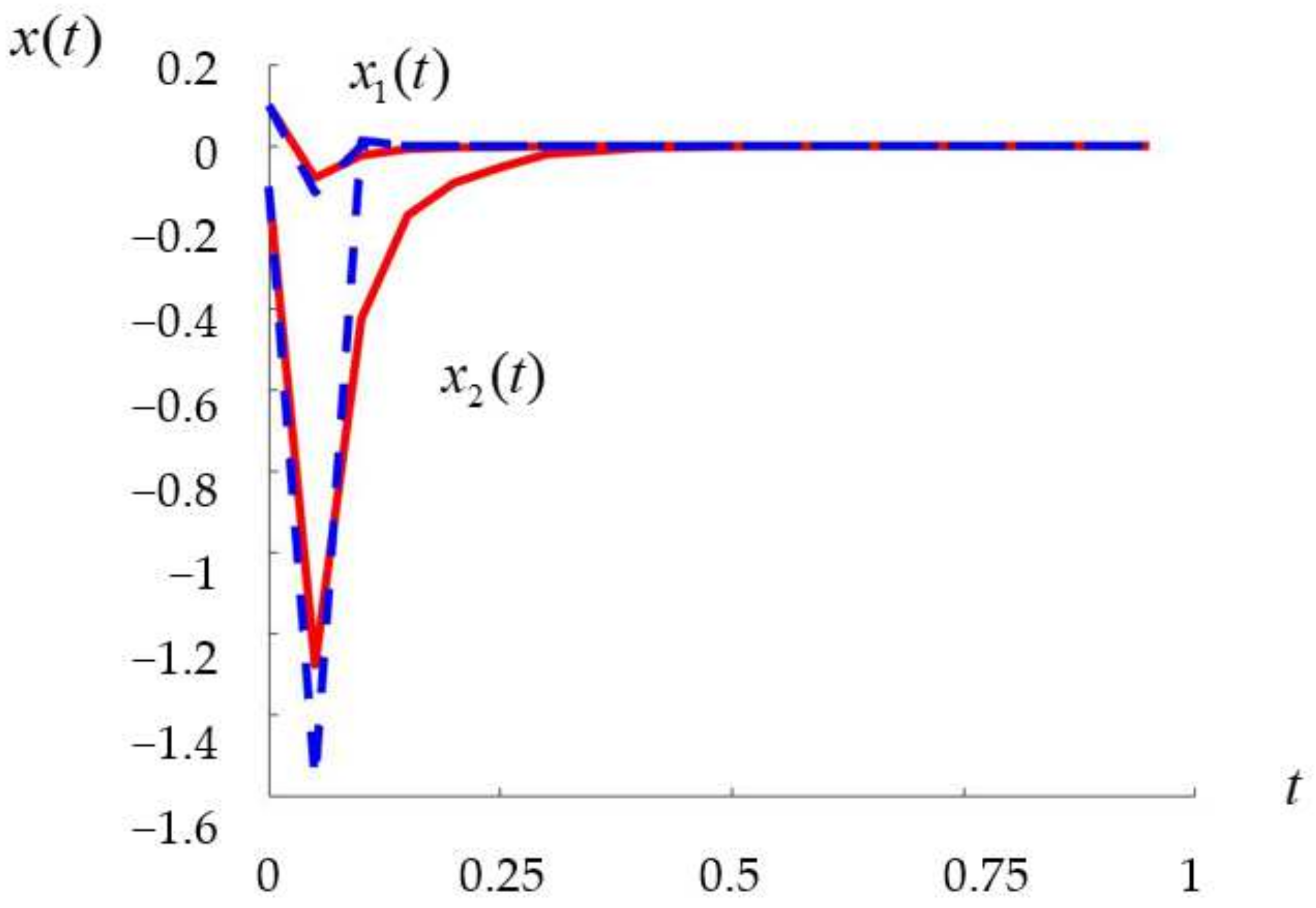
4. Computational Experiments
| Algorithm 1: Discrete modified Padé regulator construction. |
|
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mracek, C.P.; Cloutier, J.R. Control designs for the non-linear benchmark problem via the state-dependent Riccati equation method. Int. J. Rob. Nonlin. Contr. 1998, 8, 401–433. [Google Scholar] [CrossRef]
- Cimen, T. State dependent Riccati Equation (SDRE) control: A Survey. In Proceedings of the 17th the International Federation of Automatic Control World Congress, Seoul, Korea, 6–11 July 2008; Volume 41, pp. 3761–3775. [Google Scholar]
- Dmitriev, M.G.; Makarov, D.A. Smooth nonlinear controller in a weakly nonlinear control system with state depended coefficients. Trud. ISA RAN 2014, 64, 53–58. (In Russian) [Google Scholar]
- Chang, I.; Bentsman, J. Constrained discrete-time state-dependent Riccati equation technique: A model predictive control approach. In Proceedings of the 52nd IEEE Conference on Decision and Control, Florence, Italy, 10–13 December 2013; pp. 5125–5130. [Google Scholar]
- Dutka, A.S.; Ordys, A.W.; Grimble, M.J. Optimized discrete-time state dependent Riccati equation regulator. In Proceedings of the American Control Conference, Portland, OR, USA, 8–10 June 2005; pp. 2293–2298. [Google Scholar]
- György, K.; Dávid, L.; Kelemen, A. Theoretical Study of the Nonlinear Control Algorithms with Continuous and Discrete-Time State Dependent Riccati Equation. Procedia Technol. 2016, 22, 582–591. [Google Scholar] [CrossRef] [Green Version]
- Danik, Y.E.; Dmitriev, M.G. The robustness of the stabilizing regulator for quasilinear discrete systems with state dependent coefficients. In Proceedings of the International Siberian Conference on Control and Communications, Moscow, Russia, 12–14 May 2016. [Google Scholar]
- Emel’yanov, S.V.; Danik, Y.E.; Dmitriev, M.G.; Makarov, D.A. Stabilization of nonlinear discrete-time dynamic control systems with a parameter and state dependent coefficients. Dokl. Mathem. 2016, 93, 121–123. [Google Scholar] [CrossRef]
- Danik, Y.E.; Dmitriev, M.G. The comparison of numerical algorithms for discrete-time state dependent coefficients control systems. In Proceedings of the 21st International Conference on System Theory, Control and Computing, Sinaia, Romania, 19–21 October 2017; pp. 401–406. [Google Scholar]
- Danik, Y.E.; Dmitriev, M.G. Construction of Parametric Regulators for Nonlinear Control Systems Based on the Padé Approximations of the Matrix Riccati Equation Solution. In Proceedings of the 17th the International Federation of Automatic Control Workshop on Control Applications of Optimization, Yekaterinburg, Russia, 15–19 October 2018; Volume 51, pp. 815–820. [Google Scholar]
- Danik, Y.E.; Dmitriev, M.G. The construction of stabilizing regulators sets for nonlinear control systems with the help of Padé approximations. In Nonlinear Dynamics of Discrete and Continuous Systems; Abramian, A., Andrianov, I., Gaiko, V., Eds.; Springer: Cham, Switzerland, 2021; pp. 45–62. [Google Scholar]
- Heydari, A.; Balakrishnan, S.N. Approximate closed-form solutions to finite-horizon optimal control of nonlinear systems. In Proceedings of the American Control Conference, Montreal, QC, Canada, 27–29 June 2012; pp. 2657–2662. [Google Scholar]
- Kvakernaak, H.; Sivan, R. Linear Optimum Control Systems; Wiley-Interscience: New York, NY, USA, 1972. [Google Scholar]
- Vasil’eva, A.B.; Butuzov, V.F. Asymptotic Expansions of a Solutions of Singularly Perturbed Equations; Nauka: Moscow, Russia, 1973. (In Russian) [Google Scholar]
- Vasil’eva, A.B.; Butuzov, V.F.; Kalachev, L.V. The Boundary Function Method for Singular Perturbation Problems; Society for Industrial and Applied Mathematics: University City, MO, USA; Philadelphia, PA, USA, 1995. [Google Scholar]
- Vasil’eva, A.B.; Dmitriev, M.G. Singular perturbations in optimal control problems. J. Sov. Mathem. 1986, 34, 1579–1629. [Google Scholar] [CrossRef]
- Kurina, G.A.; Dmitriev, M.G.; Naidu, D.S. Discrete singularly perturbed control problems (A survey). Dyn. Contin. Discr. Impuls. Syst. Ser. B Appl. Algor. 2017, 24, 335–370. [Google Scholar]
- Glizer, V.Y.; Dmitriev, M.G. Asymptotics of a solution of some discrete optimal control problems with small step. Different. Equat. 1979, 15, 1681–1691. (In Russian) [Google Scholar]
- Gaipov, M.A. Asymptotics of the solution of a nonlinear discrete optimal control problem with small step without constraints on the control (formalism). I. Izvest. Akad. Nauk TurkmenSSR 1990, 1, 9–16. (In Russian) [Google Scholar]
- Belokopytov, S.V.; Dmitriev, M.G. Direct scheme in optimal control problems with fast and slow motions. Syst. Contr. Lett. 1986, 8, 129–135. [Google Scholar] [CrossRef]
- Afanas’ev, V.N. Control of nonlinear plants with state-dependent coefficients. Autom. Remote Control 2011, 72, 713–726. [Google Scholar] [CrossRef]
- Afanas’ev, V.N.; Presnova, A.P. Parametric Optimization of Nonlinear Systems Represented by Models Using the Extended Linearization Method. Autom. Remote Control 2021, 82, 245–263. [Google Scholar] [CrossRef]
- Baker, G.A.; Baker, G.A., Jr.; Baker, G.; Graves-Morris, P.; Baker, S.S. Padé Approximants: Encyclopedia of Mathematics and It’s Applications, 2nd ed.; Cambridge University Press: Cambridge, UK, 1996. [Google Scholar]
- Balandin, D.; Kogan, M. Synthesis of Control Laws Based on Linear Matrix Inequalities; Fizmatlit: Moscow, Russia, 2007. (In Russian) [Google Scholar]
- ElBsat, M.N. Finite-Time Control and Estimation of Nonlinear Systems with Disturbance Attenuation. Ph.D. Thesis, Marquette University, Milwaukee, WI, USA, August 2012. [Google Scholar]

{kind=link}
| D-SDRE | Uniform First-Order Asymptotic Approximation | Modified Padé [1/2] Approximation |
|---|---|---|
| 19.2226 | 16.3533 | 16.0882089921279 |
| Modified Padé [1/2] Approximation | Uniform First-Order Asymptotic Approximation | D-SDRE | |
|---|---|---|---|
| 0.05 | 16.0882 | 16.3533 | 19.2226 |
| 0.1 | 31.7171 | 29.2683 | 38.2234 |
| 0.125 | 36.1462 | 38.6610 | 47.7203 |
| 0.2 | 64.6920 | 1630.8255 | 76.2066 |
| 0.25 | 76.3028 | 2576.7654 | 95.1958 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Danik, Y.; Dmitriev, M. Symbolic Regulator Sets for a Weakly Nonlinear Discrete Control System with a Small Step. Mathematics 2022, 10, 487. https://doi.org/10.3390/math10030487
Danik Y, Dmitriev M. Symbolic Regulator Sets for a Weakly Nonlinear Discrete Control System with a Small Step. Mathematics. 2022; 10(3):487. https://doi.org/10.3390/math10030487
Chicago/Turabian StyleDanik, Yulia, and Mikhail Dmitriev. 2022. "Symbolic Regulator Sets for a Weakly Nonlinear Discrete Control System with a Small Step" Mathematics 10, no. 3: 487. https://doi.org/10.3390/math10030487
APA StyleDanik, Y., & Dmitriev, M. (2022). Symbolic Regulator Sets for a Weakly Nonlinear Discrete Control System with a Small Step. Mathematics, 10(3), 487. https://doi.org/10.3390/math10030487