2. Materials and Methods
In this article, we describe the proposed research, which is based on the quantitative testing of pupils’ competences in the form of a pre-test and post-test, implemented in a pedagogical experiment. To test the pupils, a test called Skills for Life was used, which is designed to test the selected competences of pupils in the second grade of primary school. In the pedagogical experiment, we divided the pupils into experimental and control groups, whose test results were statistically compared. In the experimental group, the project-based teaching of programming took place using a robotic kit.
2.1. Research Objectives and Hypotheses
Therefore, the research objective for this investigation was as follows:
RO: Analyze the effect of project-based learning of programming robotic kits on students’ problem-solving competence.
To further the research investigation, we set the following hypotheses to be tested and accepted or rejected as appropriate.
H1: Pupils taught by project-based learning of robotic kit programming are more successful in solving the problem-solving test than pupils taught the traditional way.
H2: Students taught project-based programming with robotics kits achieve a higher development of problem-solving competence.
The research tool used was a pedagogical experiment, which uses the division of pupils in control and experimental groups to compare the monitored variables in these groups. In the research investigation, pupils were divided into groups, according to the current conditions and possibilities in primary school. In the control group of pupils, normal programming lessons were taught using Lego Mindstorms robotic kits. In the experimental group, project-based programming learning using the same Lego Mindstorms robotic kit was used.
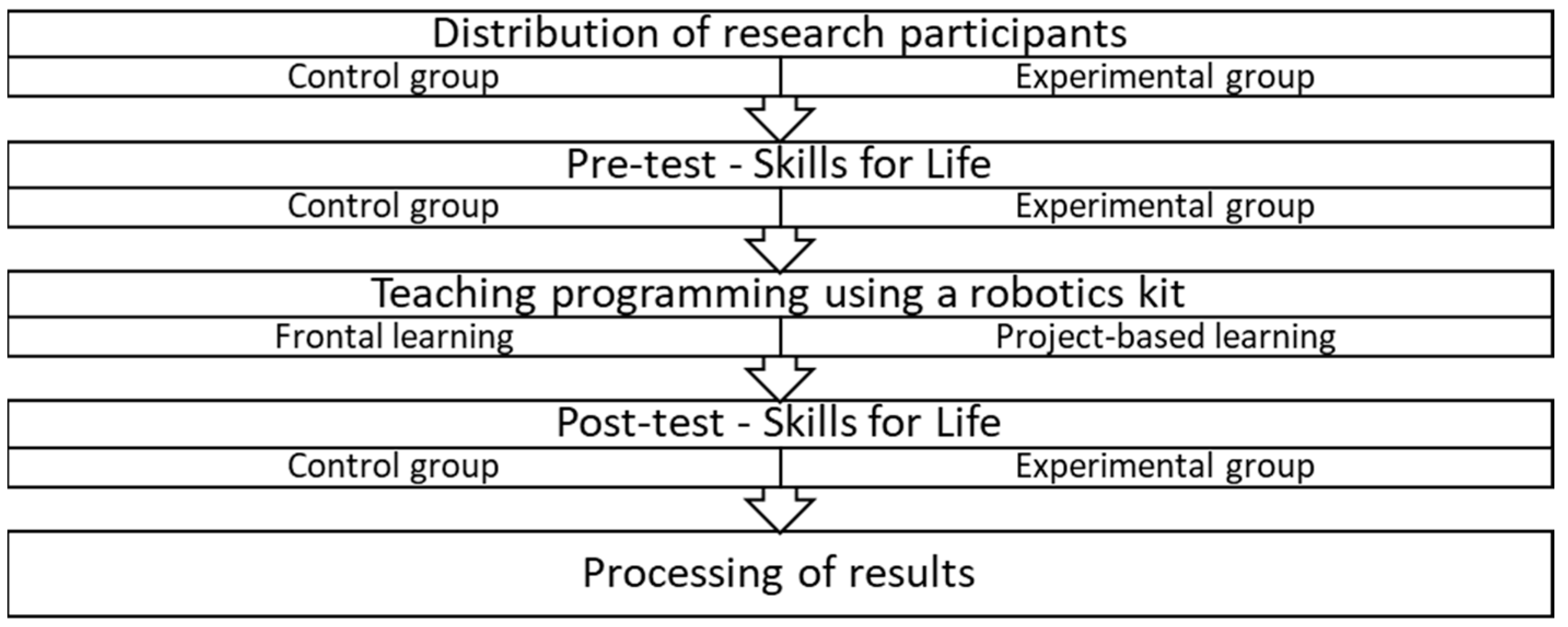
The scheme in
Figure 1 of the research survey includes a pre-test and post-test of student competences focused on problem-solving competence, social-personal competence, communicative competence and working with information. Before the teaching of programming, a pre-test was given for each group separately, followed by the teaching of programming with the use of robotic kits in both the experimental group and the control group. After the teaching block, students in individual groups were given a post-test of student competencies. The block of teaching programming included teaching the theoretical basis and practical teaching in solving complex tasks including programming and construction parts. The results of pre-tests and post-tests of student competencies are statistically processed and visualized using graphs in the next part of the work.
2.2. Testing Student Competences
To test student competences, we used the adaptive online test, Skills for Life. This is a test from the Scio company, which is dedicated to testing pupils and students in schools. The test is divided into three areas, the first area focuses on working with information, the second on relationships and communication, and the third area focuses on problem solving. This test is used by the Scio company for testing pupils in the second grade of elementary school. Individual areas of the test focus on individual student competencies: problem-solving, communicative and social-personal. Pupils had enough time for the test, 60 min was recommended—most pupils managed to complete the test within 45 min.
Basic information about the Skills for Life test is available on the website [
36] of the Scio company, where it is possible to order student testing, and at the same time it is possible to view and try to solve freely available sample tasks from the test. The test contains 3 x 15 different questions, which were selected according to the students’ previous answers. The test is adaptive. There are questions with a choice of answers from multiple options or matching answers, questions with multimedia content that contain, for example, videos, and placement questions with interactive images and tables. A sample of the test and individual tasks can be found here [
36]. Student testing took place in the ScioDat [
37] online testing environment, where each student had their own account, where they were able to take tests and monitor their results. Managing the accounts and assigning individual tests to classes and students were managed by the school administrator in the same environment, who also had an overview of the testing of individual students as well as entire classes.
The Skills for Life test is adaptive—according to the student’s answers, it assigned additional questions in order to offer the student the opportunity to achieve the best possible result. The test is divided into three parts that follow each other, the first part is working with information, the second part is relationships and communication, the third part is problem solving.
Immediately after completing the test, the student received the results of their testing in one pdf file. The file contained results divided into individual areas of the test: working with information, relationships and communication and problem solving. In the results, the student also found his/her acquired level in each area. The levels that a student could get in the test were: Beginner, Explorer, Discoverer, Pro and Specialist. In addition to the obtained level, the student received a textual qualitative evaluation of their result, followed by a description of how they could improve to a higher level in the given area of the test. A sample of the test results is in
Appendix A. The school testing administrator had an overview of all the test results, and at the same time, had them processed in clear tables, where the results of the students of the given class were compared with the results of other students from elementary schools and multi-year high schools in the same grade who took the same test that they participated in.
2.3. Description of the Research Sample and its Selection
The research set of participants in the research investigation was selected according to the availability and current possibilities in the accessibility of elementary schools with regard to government regulations in the fight against the COVID-19 pandemic. In our work, we focused on second-grade pupils of primary schools. We had set several criteria for selecting the research sample:
Territorial delimitation;
Elementary school has a second grade;
The elementary school has suitable spaces and equipment for teaching with robotic kits;
Only for second grade students.
Regarding these established school selection criteria and with regard to government measures, an urban primary school was selected for the research part of this work, which was equipped with classrooms with modern digital technology, such as an interactive hall or a television studio. The basic characteristics of the elementary school, which was taken from the annual report, are: “The elementary school is a complete school from the 1st to the 9th grades. It includes a total of 17 main classes. About 350 pupils and about 40 teachers and assistants attend the school. It is taught in one building. Disabled access is provided here.” [
38]. Inclusive education takes place in the chosen elementary school, where disabled students are part of regular classes. Some pupils use the help of assistants—these students were also included in our research.
The research part, which was implemented according to the proposed scheme in
Figure 1, was implemented in the 8th grade, where there was a pair of classes labeled A and B. The students were not divided into classes according to any key, nor according to grades, so there was a random distribution of students in the classrooms. In the year, one class was selected as the control group and the other as the experimental group—the selection of these class-groups was, again, completely random.
First, the pre-test of the Skills for Life test was implemented, followed by programming lessons, and then the post-test of the Skills for Life test was implemented. The teaching was carried out according to the schedule, personnel, material and time possibilities of individual classes (groups) and teachers, who carried out the teaching of programming using a robotic kit.
2.4. Implementation of Teaching Programming Using Robotic Kits in the Experimental and Control Groups
Teaching programming using a robotic kit took place in the final months of the 2020/2021 school year, i.e., during May and June. The teaching took place simultaneously in the experimental and control groups according to the schedule possibilities. Teaching repeatedly took place in teaching blocks of two hours, the so-called two-hour sessions.
The Lego Mindstroms EV3 robotic kit in the basic educational set, which is suitable for teaching in the second grade of primary schools, was used for teaching. The content of the Lego Mindstorms EV3 educational set is more than sufficient for basic robotics projects. The compatible LEGO MINDSTORMS Education EV3 program was used for programming and controlling the robot; this program uses icons (blocks) of individual structural elements of the robot—motors, sensors, display, etc., and program elements—cycles, conditions, custom blocks, etc., with which we could set individual parameters. By connecting the individual icons, the students created a program, which they then uploaded to the robot.
The content of the curriculum for teaching programming was also created with regard to the new RVP ZV in the subject Informatics in the field of Algorithmization and programming, for example, task decomposition, cycles, branching, program verification, error finding, algorithm and program modification.
Individual topics of lessons:
Work with the control unit;
Programming the movement of the robot;
Use of cycles in robot movement;
Use of branching and sensors in robot movement;
Solving complex tasks using a robot.
During the lesson, students worked in smaller groups of 2–3 members, which was the optimal number for working with a robotic kit, and the students’ preferred group size [
39]. The division into working groups took place according to student preferences.
A sample task for the students was driving the robot along the black line. In this task, the students were looking for the ideal location of the light sensor in the robot’s construction. Subsequently, the students created a control program that used the values from the light sensor so that it could drive along the black line. The students debugged and modified the program for different black lines such as straight line, zigzag line, crossing lines, dashed line, wide and narrow line. After improving the control program, the students showed and compared their solutions for driving the robot along the black line. This sample task was very enjoyable for the students in both the experimental and control groups. In the experimental group, this task was very popular and motivated the students to solve it quickly. The students in the groups wanted to have the best possible solution, so they focused a lot on the construction of the robot and the appropriate placement of the sensor. Each group of students had a different robot construction. The control program for the robot differed according to its design and the location of the motors, but also in the approach to solving this task. There were more different control program solutions between the groups. At the end, the students presented their projects and solutions. In the control group, there were a number of pupils who were initially similarly enthusiastic, but the pupils’ motivation was short-lived, which was demonstrated in the phase of solving the control program of the robot for driving along the black line. The students debugged and improved their control program to a lesser extent, and the solution to this task was not so imaginative. The solutions to the sample task in both the control and experimental groups were primarily functional and the robot always traveled along the black line.
Other example tasks are, for example, the detection of an obstacle with an ultrasonic sensor and its subsequent embrace—a task for using repetition in a program using the example of an autonomous robotic mower—next, the robot rides in the trajectory of geometric shapes.
2.5. Differences in Teaching of Experimental and Control Groups
Pupils in the control and experimental groups used the same Lego Mindstroms EV3 robotic kits, which they programmed in the same LEGO MINDSTORMS Education EV3 desktop application. The distribution of teaching topics and their continuity was the same. The main difference was in the use of project teaching in the experimental group, which was guided by the division of teaching into four phases according to Kratochvílova [
26]. These were the following phases: project planning, project implementation, project output presentation and project evaluation, which were discussed in more detail in the previous article. Project teaching was new for some pupils, and therefore, it was sometimes more demanding, especially from a time point of view. According to the teacher’s suggestions, the students started with planning the project in a group, where mutual communication in the group was important, followed by the implementation part, where the actual implementation with the robot and its programming were already taking place. Pupils presented their projects in the form of robots and program solutions and assigned tasks to each other. This phase of project teaching was positively evaluated by the pupils. This was followed by the last phase of evaluation, whereby we used mutual student evaluations together with self-evaluations.
In the control groups, programming lessons also took place in smaller working groups of pupils, but the lessons were collectively managed by one teacher, who influenced its course and pupils’ activities.
2.6. Statistical Processing of the Obtained Data
We anonymized the obtained data from the Skills for Life test after processing them into tables for individual monitored groups and parts of the test. We further processed them into graphs, which we used to visualize the data from the pre-test. For the basic description of the obtained data, we used descriptive statistics, using basic indicators such as: average, median, mode, maximum and minimum [
40]. Furthermore, we used the calculation of the five-number characteristic of the data [
41] for subsequent visualization of the distribution of levels through a box plot [
41,
42].
To verify the hypotheses, we first suggested using the parametric Student’s t-test at the significance level α = 0.05; however, when verifying the normality of the data using the Shapiro—Wilk normality test [
43,
44] and the Kolmogorov—Smirnov test [
45,
46], we found that these are not normally distributed data and the Student’s
t-test cannot be used for these data. Therefore, we chose the non-parametric two-sample Mann–Whitney test at the significance level α = 0.05. After testing the established hypotheses, we checked and verified new testing using a contingency table. For testing, we used the chi-square test of independence for the pivot table. Taking into account the data in the contingency table (theoretical frequencies of data, total frequency n) and in its combined four-field form, we proceeded to use tests for a four-field table for part of the results. For the calculation, we used Fisher’s combinatorial test [
46,
47,
48,
49].
3. Results
In this article, we describe the results obtained from the research investigation in the context of the pedagogical experiment.
3.1. Pre-Test and Post-Test
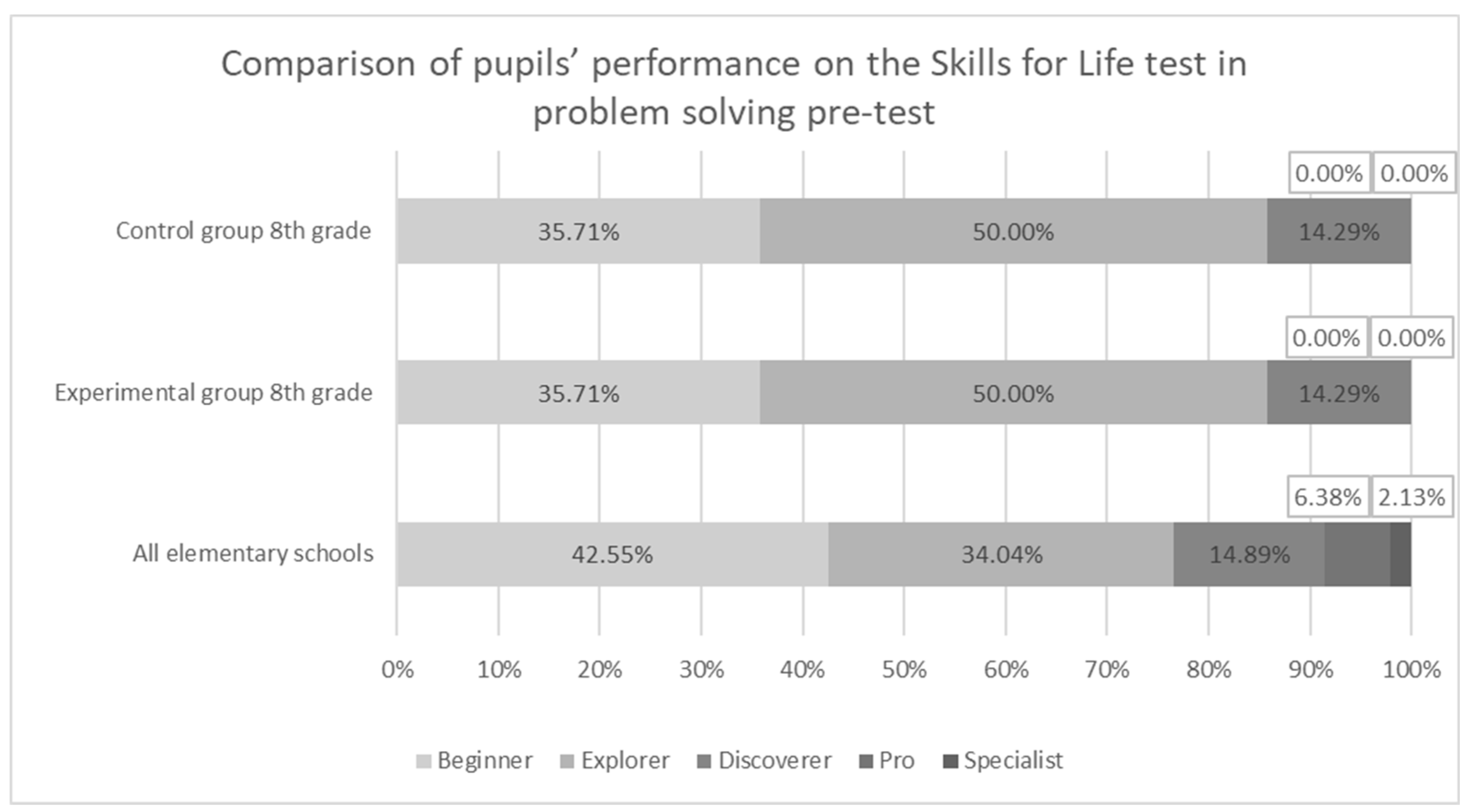
At the beginning of the pedagogical experiment, the students were divided into two groups, experimental and control. To compare and unify the levels in the two groups under study, they were reduced based on the results of the Skills for Life pre-test. The results and the distribution of the pupils according to the levels achieved in the pre-test can be seen in
Figure 2, where the agreement between the two groups is clearly visible. In the figure below, we can see a comparison of the results with the group of other pupils who took this test in the Czech Republic.
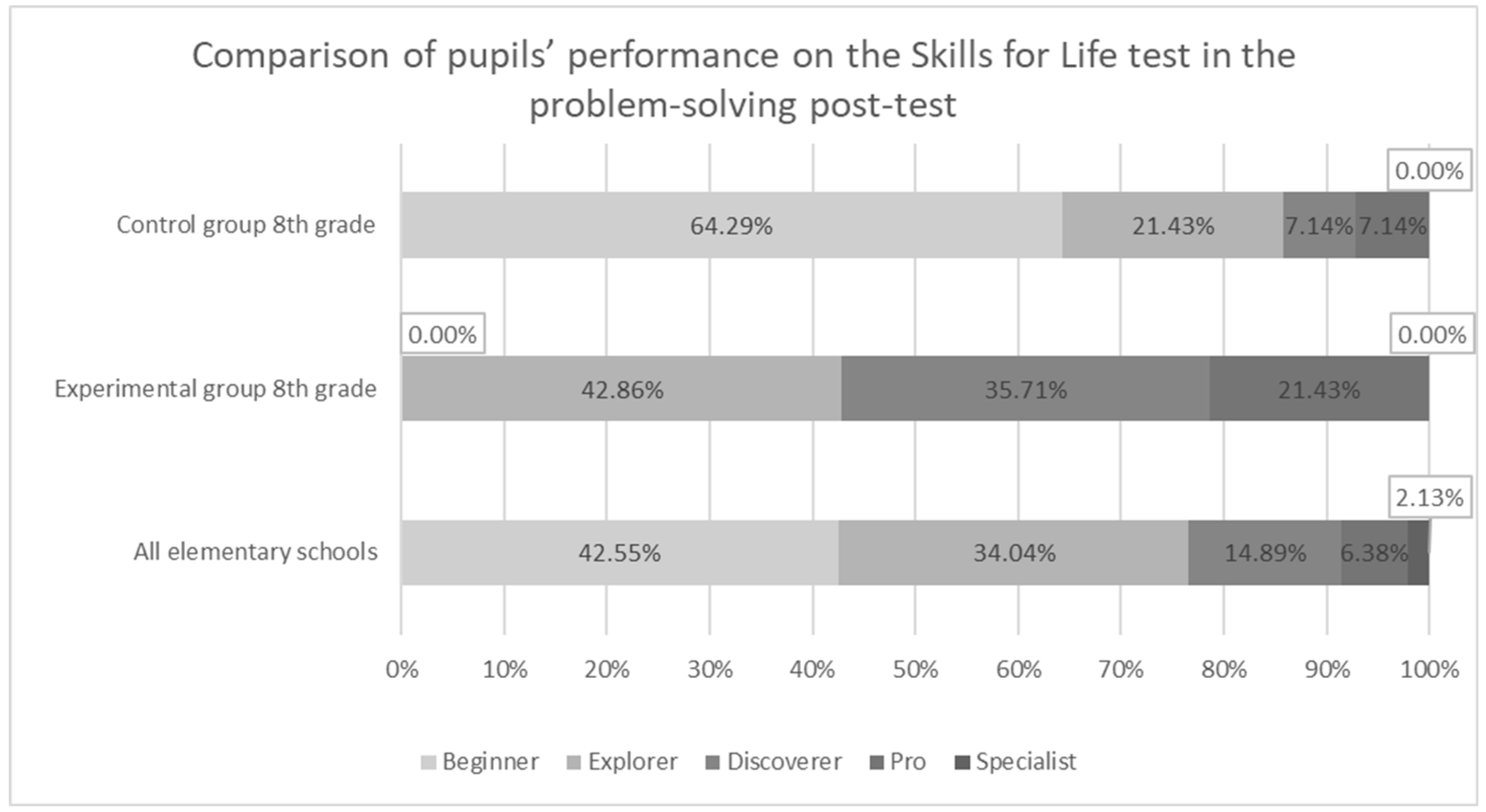
The pre-test in each group was followed by a programming lesson using the Lego Mindstroms EV3 robotic kit. At the end of the programming instruction, the Skills for Life post-test was implemented in each treatment group. The graph in
Figure 3 shows the distribution of levels obtained by the students in the problem-solving area of the test. The graph shows the differences between the control and experimental groups of pupils.
3.2. Testing of Research Hypothesis 1
To test the validity of Hypothesis H1 (students taught by project-based learning of programming with robotic kits are more successful in solving the problem-solving test than students taught in the traditional way.), we formulated the null and alternative hypotheses.
H01: There is no statistically significant difference between the average level obtained from the post-test of skills in the experimental group and the average level obtained in the control group.
HA1: There is a statistically significant difference between the average levels obtained in the two groups.
To test the hypotheses, we chose a two-sample nonparametric Mann–Whitney test at a significance level of α = 0.05.
For further calculations, we constructed a table showing the levels obtained by students in the Skills for Life test for the problem-solving domain, comparing the experimental and control groups in grade 8. The names of the students were anonymized. From this table, we constructed a table of the pooled ranking of individual students according to their obtained levels for the further calculation of the Mann–Whitney test. Subsequently, from this table, using the formula, we calculated T
E and T
C [
46].
We then performed check calculations and verified the validity of the relationship, where n = 14 and m = 14.
The calculation of U
E and U
C followed
We then performed further check calculations and verified the validity.
At the same time, we determined the test criterion according to:
We found the value of w
α;m;n for specific values of α = 0.05; m = 14 and n = 14 in the Mann–Whitney test tables [
50]. The observed value from the tables was w
0.05;14;14 = 55, which we compared and found.
Therefore, we rejected hypothesis H01 and accepted the alternative hypothesis HA1; it is true that there is a statistically significant difference between the means obtained in the two groups.
To verify the results of the Mann–Whitney test, we proposed to use another test, namely, the chi-square test of independence for a four-field table, which we created based on the rules on merging columns and rows in a contingency table. However, considering the values in the created table, i.e., size n = 28 and the number of theoretical frequencies less than 5, we had to proceed using Fisher’s combinatorial test for the four-field table [
46].
To test the validity of Hypothesis H1 (students taught by project-based learning of programming with robotic kits are more successful in solving the problem-solving test than students taught by the traditional method.), we formulated the null and alternative hypotheses using Fisher’s combinatorial test.
H01: There is no statistically significant difference between the average level obtained from the post-test of skills achieved by the experimental group and the average level achieved by the control group.
HA1: There is a statistically significant difference between the average levels obtained in the two groups.
The chosen significance level is α = 0.05.
From the table created, we performed probability calculations for each table configuration, which were then summed to obtain the resulting probability. We compared the value of the resulting probability with the selected significance level α = 0.05 and decided to accept or reject the hypothesis. For our table, the value of the resulting probability is p = 0.046, which is lower than α = 0.05, therefore, we rejected hypothesis H01 and accepted the alternative hypothesis HA1; it is true that there is a statistically significant difference between the means obtained in the two groups.
The previous calculations confirmed the effect of project-based learning on students’ competencies and confirmed the research hypothesis H1: students taught by project-based learning of robotic building block programming are more successful in solving the problem-solving test than students taught the traditional way.
3.3. Testing of Research Hypothesis 2
To test the validity of hypothesis H2 (students taught project-based programming with robotic kits achieve higher development of problem-solving competence.), we again formulated the null and alternative hypotheses.
H02: There is no statistically significant difference between the mean level from the skills pre-test and the mean level from the skills post-test achieved by the experimental group.
HA2: There is a statistically significant difference between the average levels achieved in the two groups.
To test the hypotheses, we chose the nonparametric two-sample Mann–Whitney test at the significance level α = 0.05. For further calculations, we constructed a table of the pooled ranking of individual students according to their obtained levels; for further calculation of the Mann–Whitney test, we calculated T
Pr and T
Po [
51].
We then performed check calculations and verified the validity of the relationship, where n = 14 and m = 14.
The U
Pr and U
Po calculations followed
We then performed further check calculations and verified the validity.
At the same time, we determined the test criterion according to:
We found the value of w
α;m;n for specific values of α = 0.05; m = 14 and n = 14 in the Mann–Whitney test tables [
50]. The observed value from the tables was w
0.05;14;14 = 55, which we compared and found.
Therefore, we rejected hypothesis H01 and accepted the alternative hypothesis HA1; it is true that there is a statistically significant difference between the means obtained in the two groups.
To verify the results of the Mann–Whitney test, we proposed to use another test, namely, the chi-square test of independence for a four-field table. However, considering the values in the created table, we had to proceed using Fisher’s combinatorial test for the four-field table [
46].
To test the validity of hypothesis H2 (students taught project-based programming with robotic kits achieve higher development of problem-solving competence.), we again formulated the null and alternative hypotheses.
H02: There is no statistically significant difference between the mean level from the skills pre-test and the mean level from the skills post-test achieved by the experimental group.
HA2: There is a statistically significant difference between the average levels achieved in the two groups.
For our table, the value of the resulting probability is p = 0.046, which is lower than α = 0.05; therefore, we rejected hypothesis H02 and accepted the alternative hypothesis HA2, and it is true that there is a statistically significant difference between the means obtained in the two groups.
The result of Fisher’s combinatorial test for the four-field table verified the validity of the Mann–Whitney test result for the comparison of pre-test and post-test of the experimental group in grade 8.
4. Discussion
Statistical verification of the research hypothesis H1 through the Mann–Whitney test with validation using Fisher’s combinatorial test led to the rejection of hypothesis H
01 and acceptance of the alternative hypothesis H
A1. The result of this verification is that there is a statistically significant difference between the control and experimental groups of students tested in the experiment. This demonstrated the effect of project-based learning on the development of students’ competencies in learning programming using robotic building blocks. Through the Skills for Life test that was used to test problem-solving competence, the experimental group showed better results. There is debate about the impact of project-based learning on improving learning. Our research supports the positive impact of project-based learning on the development of student competencies. It also demonstrated the effect of teaching through educational robots on the development of students’ skills in the areas of computational thinking and problem solving. These findings may lead to a greater expansion of STEM instruction and the integration of multiple disciplines into collaborative learning with educational robots. Comparing our findings with the results of study [
52], our findings are clearly more demonstrable. This is due to the demonstration of the positive influence of project-based learning on the development of pupils’ competences. In the study [
52], a similar main research scheme of a pedagogical experiment with an experimental and control group and testing of skills and knowledge using pre-tests and post-tests was used. However, the positive effect of project-based learning could not be demonstrated for several described reasons.
Statistical verification of research hypothesis H2 through Mann–Whitney test with validation by Fisher’s combinatorial test led to the rejection of hypothesis H
02 and acceptance of alternative hypothesis H
A2. The result of this verification is that there is a statistically significant difference between the pre-test and post-test for the students in the experimental group. This confirmed the findings of the first hypothesis tested. The result shows the benefits of project-based learning on the development of problem-solving competence in primary school students. When comparing our findings and results, we can partially identify with study [
53], which was implemented in the project-based learning of science subjects, and with this study [
54], which focused more on teaching with educational robots. Specifically, this is a group of pupils in grade 8 of primary school. Pupils in this grade often make decisions about their life path and further studies. Therefore, teaching programming with educational robots in STEM areas can motivate them to become more interested in particular science subjects. From the feedback from the students, this teaching was very positively evaluated. Pupils are keen to build on this teaching with further learning in STEM areas, and are particularly interested in educational robotics, computer science and mathematics. Some opinions and views may coincide with the findings here [
55] and in a study focused on robotics [
53]. We intend to continue this exploration and present and clarify further findings.
Our study demonstrated the impact of project-based learning on the development of students’ problem-solving competencies, thus, clarifying the research aim of our study.
A major contribution of this study is the verification of the positive impact of project-based learning on the development of students’ competences. In our study, we were able to test problem-solving competence using a suitable Skills for Life test. We observe this selected key competence as multidisciplinary, so the results of our work are of great help to other researchers in this field. Additionally, especially for the multidisciplinary field of STEM education and for the field of teaching with educational robotics. Linking these disciplines in project-based learning with a focus on developing students’ competencies is beneficial.


{kind=link}
{kind=link}
{kind=link}



