

Analytical and Numerical Study on Forced and Damped Complex Duffing Oscillators


Abstract
1. Introduction
2. FDCDO (I)
Reducing the I.V.P. (6) to Two Decoupled FDDOs
3. FDCDO (II)
Reducing the I.V.P. (13) to Two Decoupled FDDOs
4. Mathematical Methods for Analyzing the FDDO
4.1. First Approach to Analyzing the FDDO
4.2. Second Approach to Analyzing the FDDO
5. Finite Difference Method for Analyzing the FDCDOs
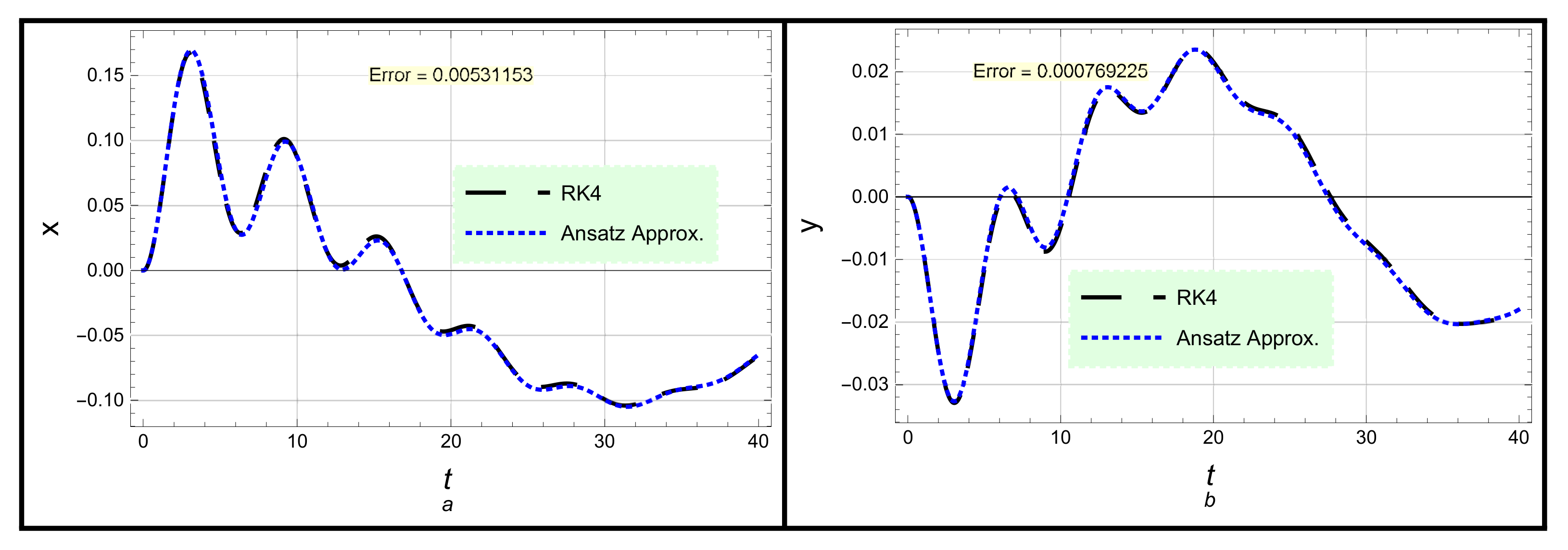
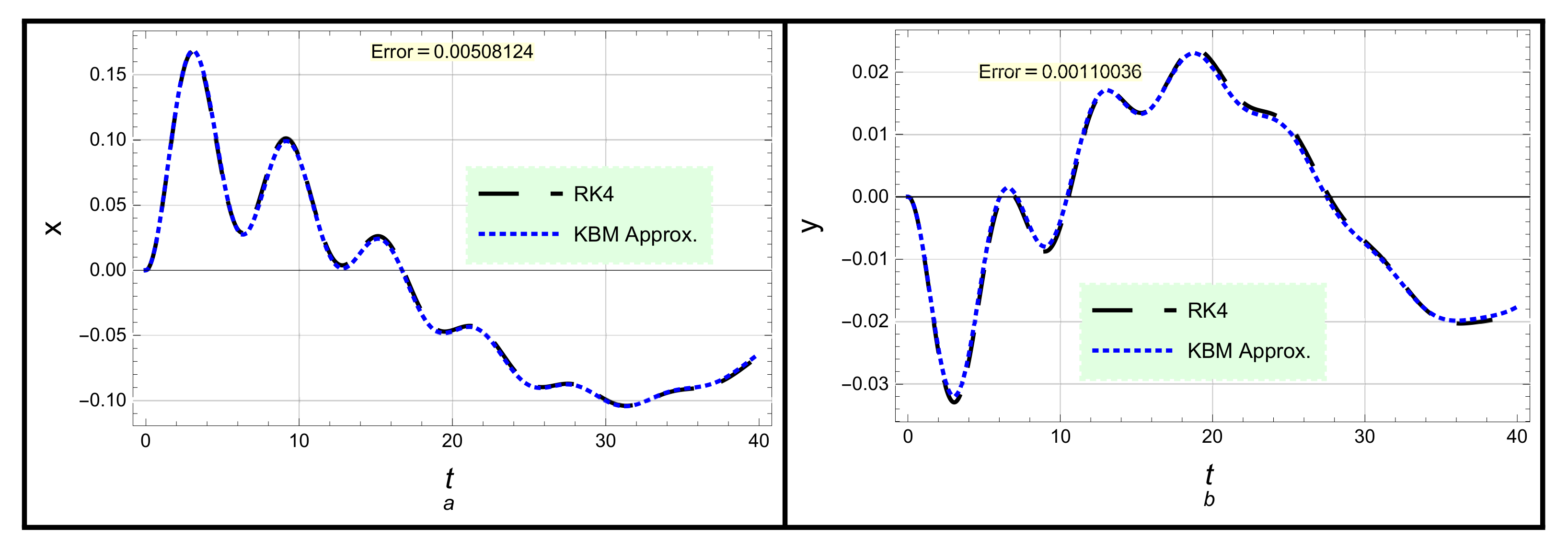
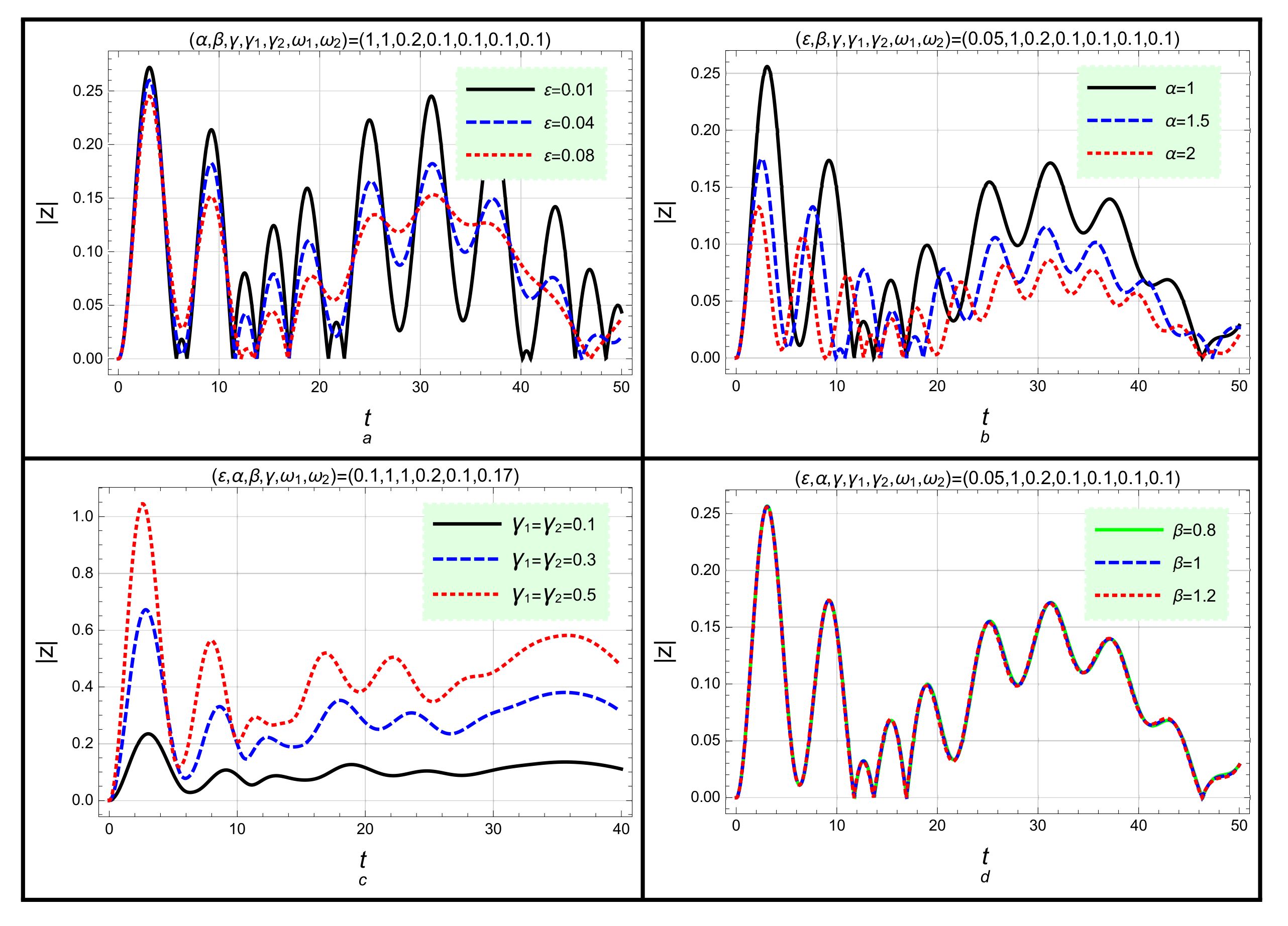
6. Results and Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Cveticanin, L. Analytic solution of the system of two coupled differential equations with the fifth-order non-linearity. Physica A 2003, 317, 83–94. [Google Scholar] [CrossRef]
- Cveticanin, L. Analytic approach for the solution of the complex-valued strong non-linear differential equation of Duffing type. Physica A 2001, 297, 348–360. [Google Scholar] [CrossRef]
- Nayfeh, A.H.; Zavodney, L.D. Experimental observation of amplitude and phase modulated responses of two internally coupled oscillators to a harmonic excitation. J. Appl. Mech. 1988, 55, 706–710. [Google Scholar] [CrossRef]
- Grattarola, M.; Torre, V. Necessary and suffcient conditions for synchronization of non-linear oscillator with a given class of coupling. IEEE Trans. Circuits Syst. 1977, 24, 209–215. [Google Scholar] [CrossRef]
- Cveticanin, L. Approximate analytical solutions to a class of nonlinear equations with complex functions. J. Sound Vib. 1992, 157, 289–302. [Google Scholar] [CrossRef]
- Mahmoud, G.M. Approximate solutions of a class of complex nonlinear dynamical systems. Physica A 1998, 253, 211–222. [Google Scholar] [CrossRef]
- Manasevich, R.; Mawhin, J.; Zanolin, F. Periodic solutions of some complex-valued Lienard and Rayleigh equations. Nonlinear Anal. 1999, 36, 997–1014. [Google Scholar] [CrossRef]
- Cveticanin, L. An approximate solution for a system of two coupled differential equations. J. Sound Vib. 1992, 152, 375–380. [Google Scholar] [CrossRef]
- Alhejaili, W.; Salas, A.H.; El-Tantawy, S.A. Approximate solution to a generalized Van der Pol equation arising in plasma oscillations. AIP Adv. 2022, 12, 105104. [Google Scholar] [CrossRef]
- El-Tantawy, S.A.; Alharthi, M.R. Novel solutions to the (un)damped Helmholtz-Duffing oscillator and its application to plasma physics: Moving boundary method. Phys. Scr. 2021, 96, 104003. [Google Scholar]
- Anh, N.D.; Hai, N.Q.; Hieu, D.V. The equivalent linearization method with a weighted averaging for analyzing of nonlinear vibrating systems. Lat. Am. J. Solids Struct. 2017, 14, 1723. [Google Scholar] [CrossRef]
- Hieu, D.V.; Hai, N.Q.; Hung, D.T. The Equivalent Linearization Method with a Weighted Averaging for Solving Undamped Nonlinear Oscillators. J. Appl. Math. 2018, 2018, 7487851. [Google Scholar] [CrossRef]
- Hieu, D.V. A New Approximate Solution for a Generalized Nonlinear Oscillator. Int. J. Appl. Comput. Math. 2019, 5, 126. [Google Scholar] [CrossRef]
- Kadji, H.E.; Orou, J.C.; Woafo, P. Regular and chaotic behaviors of plasma oscillations modeled by a modified Duffing equation. Phys. Scr. 2008, 77, 025503. [Google Scholar] [CrossRef]
- Salas, A.H.; Hammad, M.A.; Alotaibi, B.M.; El-Sherif, L.S.; El-Tantawy, S.A. Analytical and Numerical Approximations to Some Coupled Forced Damped Duffing Oscillators. Symmetry 2022, 14, 2286. [Google Scholar] [CrossRef]
- He, J.H. Some asymptotic methods for strongly nonlinear equations. Int. J. Mod. Phys. B 2006, 20, 1141–1199. [Google Scholar] [CrossRef]
- He, J.H. An improved amplitude-frequency formulation for nonlinear oscillators. Int. J. Nonlinear Sci. Numer. Simul. 2008, 9, 211–212. [Google Scholar] [CrossRef]
- El-Tantawy, S.A.; Salas Alvaro, H.; Alharthi, M.R. A new approach for modelling the damped Helmholtz oscillator: Applications to plasma physics and electronic circuits. Commun. Theor. Phys. 2021, 73, 035501. [Google Scholar] [CrossRef]
- Alhejaili, W.; Salas, A.H.; El-Tantawy, S.A. Novel Approximations to the (Un)forced Pendulum–Cart System: Ansatz and KBM Methods. Mathematics 2022, 10, 2908. [Google Scholar] [CrossRef]
- El-Tantawy, S.A.; Salas, A.H.; Alharthi, M.R. On the Analytical and Numerical Solutions of the Linear Damped NLSE for Modeling Dissipative Freak Waves and Breathers in Nonlinear and Dispersive Mediums: An Application to a Pair-Ion Plasma. Front. Phys. 2021, 9, 580224. [Google Scholar] [CrossRef]
- Cao, Q.H.; Dai, C.Q. Symmetric and Anti-Symmetric Solitons of the Fractional Second- and Third-Order Nonlinear Schrödinger Equation. Chin. Phys. Lett. 2021, 38, 090501. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Approximation | |||
|---|---|---|---|
| Ansatz Approx. | |||
| KBM Approx. | |||
| FDM Approx. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alhejaili, W.; Salas, A.H.; El-Tantawy, S.A. Analytical and Numerical Study on Forced and Damped Complex Duffing Oscillators. Mathematics 2022, 10, 4475. https://doi.org/10.3390/math10234475
Alhejaili W, Salas AH, El-Tantawy SA. Analytical and Numerical Study on Forced and Damped Complex Duffing Oscillators. Mathematics. 2022; 10(23):4475. https://doi.org/10.3390/math10234475
Chicago/Turabian StyleAlhejaili, Weaam, Alvaro H. Salas, and Samir A. El-Tantawy. 2022. "Analytical and Numerical Study on Forced and Damped Complex Duffing Oscillators" Mathematics 10, no. 23: 4475. https://doi.org/10.3390/math10234475
APA StyleAlhejaili, W., Salas, A. H., & El-Tantawy, S. A. (2022). Analytical and Numerical Study on Forced and Damped Complex Duffing Oscillators. Mathematics, 10(23), 4475. https://doi.org/10.3390/math10234475