
Learning Adaptive Spatial Regularization and Temporal-Aware Correlation Filters for Visual Object Tracking

 , ,
, ,
Abstract
1. Introduction
- We have proposed the ASTCF model by introducing adaptive spatial regularization and temporal-aware terms into the DCF framework. The adaptive spatial regularization can provide a more robust appearance model to handle large appearance changes at different times, while the temporal-aware constraint can enhance the time continuity and consistency of this model.
- In order to solve ASTCF efficiently, we have optimized it with the ADMM algorithm, where the related objective function can be transformed into three subproblems with analytical closed-form solutions. Moreover, our method can converge within a few iterations.
- Our ASTCF tracker has performed comparative experiments on both short-term tracking and long-term tracking datasets, including OTB2015, VOT2018 and LaSOT test dataset. These experiments indicate that our tracker achieves a very impressive performance and a real-time tracking speed in comparison with the state-of-the-art trackers.
2. Related Works
3. The Proposed Method
3.1. Overall Framework
3.2. Adaptive Spatial Regularization and Temporal-Aware Model
3.2.1. Revisit the Objective Function of BACF Method
3.2.2. Adaptive Spatial Regularization and Temporal-Aware Objective Function
3.2.3. Optimization of Objective Function
- Subproblem
- Subproblem
- Subproblem
- Lagrange multiplier
3.2.4. Locate Object Position and Model Update
| Algorithm 1. The proposed ASTCF model | |
| Input: The initial position and scale size of the object in the first frame, initialize parameter . | |
| Output: Estimate object position and scale size in the th frame, tracking model, and CF template. | |
| repeat: | |
| |
| Until last frame of sequence | |
4. Experimental Results
4.1. OTB2015 Dataset
4.2. VOT2018 Dataset
4.3. LaSOT Dataset
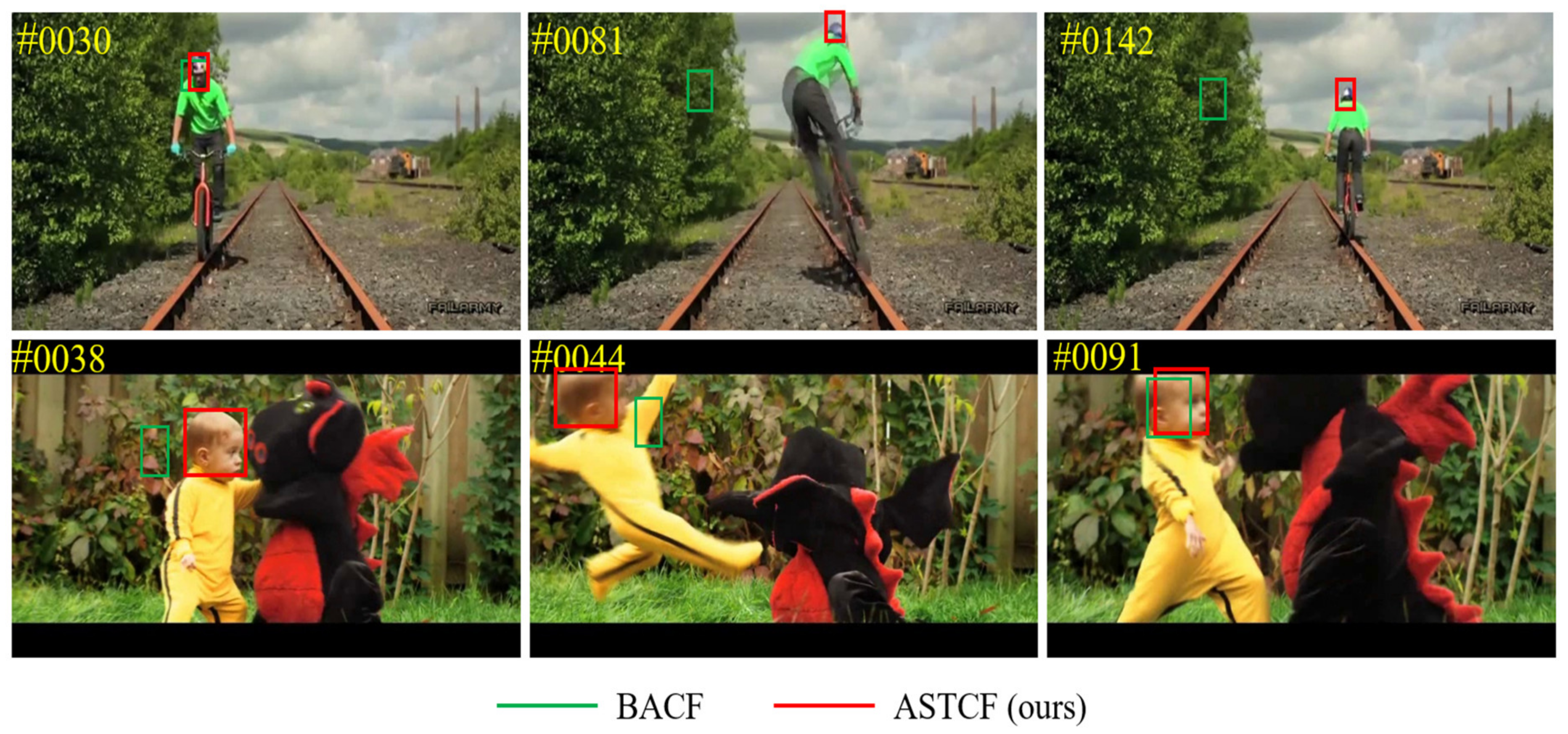
4.4. Qualitative Evaluation
4.5. Temporal-Aware Constraint Parameter
4.6. Ablation Studies
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, P.X.; Wang, D.; Wang, L.J.; Lu, H.C. Deep visual tracking: Review and experimental comparison. Pattern Recognit. 2018, 76, 323–338. [Google Scholar] [CrossRef]
- Smeulders, A.W.; Chu, D.M.; Cucchiara, R.; Calderara, S.; Dehghan, A. Visual tracking: An experimental survey. IEEE Trans. Pattern Anal. Mach. Intell. 2014, 36, 1442–1468. [Google Scholar] [PubMed]
- Wang, N.Y.; Shi, J.; Yeung, D.Y.; Jia, J. understanding and diagnosing visual tracking systems. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 3101–3109. [Google Scholar]
- Yilmaz, A.; Javed, O.; Shah, M. Object tracking: A survey. ACM Comput. Surv. 2006, 38, 1–45. [Google Scholar] [CrossRef]
- Sundararaman, R.; De Almeida Braga, C.; Marchand, E.; Pettré, J. Tracking Pedestrian Heads in Dense Crowd. In Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Virtual, 19–25 June 2021; pp. 3864–3874. [Google Scholar] [CrossRef]
- Jang, J.; Jiang, H. MeanShift++: Extremely Fast Mode-Seeking with Applications to Segmentation and Object Tracking. In Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Virtual, 19–25 June 2021; pp. 4100–4111. [Google Scholar] [CrossRef]
- Yu: Yu, Y.; Chen, L.; He, H.; Liu, J.; Zhang, W.; Xu, G. Second-Order Spatial-Temporal Correlation Filters for Visual Tracking. Mathematics 2022, 10, 684. [Google Scholar] [CrossRef]
- Liu, L.; Cao, J. End-to-end learning interpolation for object tracking in low frame-rate video. IET Image Process. 2020, 14, 997–1216. [Google Scholar] [CrossRef]
- Bolme, D.S.; Beveridge, J.R.; Draper, B.A.; Lui, Y.M. Visual object tracking using adaptive correlation filters. In Proceedings of the Twenty-Third IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2010, San Francisco, CA, USA, 13–18 June 2010; pp. 2544–2550. [Google Scholar] [CrossRef]
- Henriques, J.F.; Caseiro, R.; Martins, P.; Batista, J. Exploiting the Circulant Structure of Tracking-by-Detection with Kernels. In Computer Vision—ECCV; Springer: Berlin/Heidelberg, Germany, 2012; pp. 702–715. [Google Scholar]
- Henriques, J.F.; Caseiro, R.; Martins, P.; Batista, J. High-Speed Tracking with Kernelized Correlation Filters. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 583–596. [Google Scholar] [CrossRef] [PubMed]
- Liu, L.; Feng, T.; Fu, Y. Learning Multifeature Correlation Filter and Saliency Redetection for Long-Term Object Tracking. Symmetry 2022, 14, 911. [Google Scholar] [CrossRef]
- Galoogahi, H.K.; Sim, T.; Lucey, S. Correlation Filters with Limited Boundaries. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 4630–4638. [Google Scholar]
- Danelljan, M.; Hager, G.; Khan, F.S.; Felsberg, M. Learning Spatially Regularized Correlation Filters for Visual Tracking. In Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 4310–4318. [Google Scholar] [CrossRef]
- Danelljan, M.; Hager, G.; Khan, F.S.; Felsberg, M. Discriminative Scale Space Tracking. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1561–1575. [Google Scholar] [CrossRef] [PubMed]
- Galoogahi, H.K.; Fagg, A.; Lucey, S. Learning Background-Aware Correlation Filters for Visual Tracking. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 1144–1152. [Google Scholar] [CrossRef]
- Dai, K.; Wang, D.; Lu, H.; Sun, C.; Li, J. Visual Tracking via Adaptive Spatially-Regularized Correlation Filters. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) 2019, Long Beach, CA, USA, 16–20 June 2019; pp. 4665–4674. [Google Scholar] [CrossRef]
- Han, R.; Feng, W.; Wang, S. Fast Learning of Spatially Regularized and Content Aware Correlation Filter for Visual Tracking. IEEE Trans. Image Process. 2020, 29, 7128–7140. [Google Scholar] [CrossRef]
- Danelljan, M.; Hager, G.; Khan, F.S.; Felsberg, M. Adaptive Decontamination of the Training Set: A Unified Formulation for Discriminative Visual Tracking. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 1430–1438. [Google Scholar] [CrossRef]
- Li, F.; Tian, C.; Zuo, W.; Zhang, L.; Yang, M. Learning Spatial-Temporal Regularized Correlation Filters for Visual Tracking. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 4904–4913. [Google Scholar] [CrossRef]
- Li, Y.; Fu, C.H.; Ding, F.Q.; Huang, Z.Y.; Lu, G. AutoTrack: Towards High-Performance Visual Tracking for UAV with Automatic Spatio-Temporal Regularization. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Virtual, 13–19 June 2020; pp. 11920–11929. [Google Scholar] [CrossRef]
- Wu, Y.; Lim, J.; Yang, M. Object Tracking Benchmark. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 1834–1848. [Google Scholar] [CrossRef] [PubMed]
- Matej, K.; Ales, L.; Jiri, M.; Michael, F.; Roman, P.; Luka, C.; Tomas, V.; Goutam, B.; Alan, L.; Abdelrahman, E.; et al. The Sixth Visual Object Tracking VOT2018 Challenge Results. In Computer Vision–ECCV 2018 Workshops. ECCV 2018. Lecture Notes in Computer Science; Leal-Taixé, L., Roth, S., Eds.; Springer: Cham, Switzerland, 2018; Volume 11129. [Google Scholar] [CrossRef]
- Fan, H.; Lin, L.; Yang, F.; Chu, P.; Deng, G.; Yu, S.; Bai, H.; Xu, Y.; Liao, C.; Ling, H. LaSOT: A High-Quality Benchmark for Large-Scale Single Object Tracking. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern RECOgnition (CVPR), Long Beach, CA, USA, 16–20 June 2019; pp. 5369–5378. [Google Scholar] [CrossRef]
- Bertinetto, L.; Valmadre, J.; Golodetz, S.; Miksik, O.; Torr, P.H.S. Staple: Complementary Learners for Real-Time Tracking. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 1401–1409. [Google Scholar] [CrossRef]
- Mueller, M.; Smith, N.; Ghanem, B. Context-aware correlation filter tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 1396–1404. [Google Scholar]
- Ma, C.; Yang, X.; Zhang, C.Y.; Yang, M. Long-term correlation tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 5388–5396. [Google Scholar]
- Tang, F.; Ling, Q. Contour-Aware Long-Term Tracking with Reliable Re-Detection. IEEE Trans. Circuits Syst. Video Technol. 2020, 30, 4739–4754. [Google Scholar] [CrossRef]
- Wang, N.; Zhou, W.; Li, H. Reliable Re-Detection for Long-Term Tracking. IEEE Trans. Circuits Syst. Video Technol. 2019, 29, 730–743. [Google Scholar] [CrossRef]
- Boyd, S. Distributed Optimization and Statistical Learning via the Alternating Direction Method of Multipliers. Found. Trends Mach. Learn. 2010, 3, 1–122. [Google Scholar] [CrossRef]
- Wu, X.; Sahoo, D.; Hoi, S.C. Recent advances in deep learning for object detection. Neurocomputing 2020, 396, 39–64. [Google Scholar] [CrossRef]
- Chen, J.; Zhou, M.; Huang, H.; Zhang, D.; Peng, Z. Automated extraction and evaluation of fracture trace maps from rock tunnel face images via deep learning. Int. J. Rock Mech. Min. Sci. 2021, 142, 104745. [Google Scholar] [CrossRef]
- Danelljan, M.; Hager, G.; Khan, F.S.; Felsberg, M. Convolutional Features for Correlation Filter Based Visual Tracking. In Proceedings of the 2015 IEEE International Conference on Computer Vision Workshop (ICCVW), Santiago, Chile, 7–13 December 2015; pp. 621–629. [Google Scholar] [CrossRef]
- Valmadre, J.; Bertinetto, L.; Henriques, J.; Vedaldi, A.; Torr, P.H.S. End-to-End Representation Learning for Correlation Filter Based Tracking. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 5000–5008. [Google Scholar] [CrossRef]
- Sun, Y.; Sun, C.; Wang, D.; He, Y.; Lu, H. ROI Pooled Correlation Filters for Visual Tracking. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 16–20 June 2019; pp. 5776–5784. [Google Scholar] [CrossRef]
- Eckstein, J.; Bertsekas, D.P. On the Douglas—Rachford splitting method and the proximal point algorithm for maximal monotone operators. Math. Program. 1992, 55, 293–318. [Google Scholar] [CrossRef]
- Karen, S.; Andrew, Z. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- Russakovsky, O.; Deng, J.; Su, H.; Krause, J.; Satheesh, S.; Ma, S.; Huang, Z.; Karpathy, A.; Khosla, A.; Bernstein, M.; et al. Imagenet large scale visual recognition challenge. Int. J. Comput. Vis. 2015, 115, 211–252. [Google Scholar] [CrossRef]
- Wu, Y.; Lim, J.; Yang, M. Online Object Tracking: A Benchmark. In Proceedings of the 2013 IEEE Conference on Computer Vision and Pattern Recognition 2013, Portland, OR, USA, 23–28 June 2013; pp. 2411–2418. [Google Scholar] [CrossRef]
- Li, B.; Wu, W.; Wang, Q.; Zhang, F.; Xing, J.; Yan, J. SiamRPN++: Evolution of Siamese Visual Tracking with Very Deep Networks. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 16–20 June 2019; pp. 4277–4286. [Google Scholar] [CrossRef]
- Danelljan, M.; Robinson, A.; Shahbaz, K.F.; Felsberg, M. ECO: Efficient Convolution Operators for Tracking. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 6931–6939. [Google Scholar] [CrossRef]
- Zhang, T.; Xu, C.; Yang, M. Learning Multi-Task Correlation Particle Filters for Visual Tracking. IEEE Trans. Pattern Anal. Mach. Intell. 2019, 41, 365–378. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Ma, C.; Wu, B.; He, Z.; Yang, M. Target-Aware Deep Tracking. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 16–20 June 2019; pp. 1369–1378. [Google Scholar] [CrossRef]
- Nam, H.; Han, B. Learning Multi-domain Convolutional Neural Networks for Visual Tracking. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 4293–4302. [Google Scholar] [CrossRef]
- Bertinetto, L.; Valmadre, J.; Henriques, J.F.; Vedaldi, A.; Torr, P.H.S. Fully-Convolutional Siamese Networks for Object Tracking. In Computer Vision–ECCV 2016 Workshops. ECCV 2016. Lecture Notes in Computer Science; Hua, G., Jégou, H., Eds.; Springer: Cham, Switzerland, 2016; Volume 9914. [Google Scholar] [CrossRef]
- Song, Y.; Chao, M.; Wu, X.; Gong, L.; Yang, M. VITAL: Visual Tracking via Adversarial Learning. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 8990–8999. [Google Scholar] [CrossRef]
- Zhang, Z.; Peng, H. Deeper and Wider Siamese Networks for Real-Time Visual Tracking. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Long Beach, CA, USA, 16–20 June 2019; pp. 4586–4595. [Google Scholar] [CrossRef]
- Zhang, L.; Gonzalez-Garcia, A.; Weijer, J.V.D.; Danelljan, M.; Khan, F.S. Learning the Model Update for Siamese Trackers. In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Korea; 2019; pp. 4009–4018. [Google Scholar] [CrossRef]
- Matej, K.; Jiri, M.; Alexs, L.; Tomas, V.; Roman, P.; Gustavo, F.; Georg, N.; Fatih, P.; Luka, C. A Novel Performance Evaluation Methodology for Single-Target Trackers. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 38, 2137–2155. [Google Scholar] [CrossRef]
- Choi, J.; Chang, H.J.; Fischer, T.; Yun, S.; Lee, K.; Jeong, J.; Demiris, Y.; Choi, J.Y. Context-Aware Deep Feature Compression for High-Speed Visual Tracking . In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 479–488. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SRDCF | BACF | STRCF | ECO | MDNet | Ours | |
|---|---|---|---|---|---|---|
| DP | 0.791 | 0.824 | 0.854 | 0.915 | 0.910 | 0.927 |
| AUC | 0.596 | 0.621 | 0.647 | 0.692 | 0.677 | 0.699 |
| FPS | 5.8 | 26.5 | 24.8 | 9.9 | 1.4 | 23.5 |
| Methods | Camera Motion | Empty | Illum Change | Motion Change | Occlusion | Size Change | Mean | Weighted Mean | Pooled |
|---|---|---|---|---|---|---|---|---|---|
| Ours | 0.5974 | 0.6322 | 0.6012 | 0.6131 | 0.4899 | 0.6201 | 0.6163 | 0.6094 | 0.6098 |
| DSTRCF | 0.5706 | 0.5898 | 0.5294 | 0.5286 | 0.4661 | 0.4660 | 0.5251 | 0.5399 | 0.5564 |
| SiamDW | 0.5707 | 0.6225 | 0.4819 | 0.5111 | 0.4981 | 0.4267 | 0.5185 | 0.5393 | 0.5594 |
| ECO | 0.5221 | 0.5598 | 0.5253 | 0.4775 | 0.3714 | 0.4436 | 0.4833 | 0.4978 | 0.5130 |
| UpdateNet | 0.5226 | 0.5713 | 0.5179 | 0.4936 | 0.4805 | 0.4842 | 0.5117 | 0.5194 | 0.5324 |
| DSRDCF | 0.4982 | 0.5716 | 0.5252 | 0.4842 | 0.4239 | 0.4569 | 0.4933 | 0.5016 | 0.5156 |
| SRDCF | 0.4855 | 0.5499 | 0.5912 | 0.4493 | 0.4322 | 0.4398 | 0.4913 | 0.4866 | 0.5009 |
| Staple | 0.5580 | 0.5958 | 0.5634 | 0.5187 | 0.4764 | 0.4799 | 0.5320 | 0.5405 | 0.5518 |
| DSST | 0.4219 | 0.4517 | 0.5110 | 0.3751 | 0.3482 | 0.3195 | 0.4046 | 0.4005 | 0.4090 |
| Methods | Camera Motion | Empty | Illum Change | Motion Change | Occlusion | Size Change | Mean | Weighted Mean | Pooled |
|---|---|---|---|---|---|---|---|---|---|
| Ours | 19.000 | 6.000 | 1.000 | 15.000 | 10.000 | 6.000 | 9.000 | 9.083 | 38.000 |
| DSTRCF | 11.000 | 11.000 | 2.000 | 13.000 | 10.000 | 7.000 | 9.000 | 10.255 | 36.000 |
| SiamDW | 26.000 | 9.000 | 3.000 | 20.000 | 26.000 | 15.000 | 16.500 | 18.041 | 62.000 |
| ECO | 19.000 | 7.000 | 4.000 | 18.000 | 18.000 | 9.000 | 12.500 | 13.511 | 44.000 |
| UpdateNet | 29.000 | 11.000 | 3.000 | 33.000 | 21.000 | 13.000 | 18.333 | 20.876 | 75.000 |
| DSRDCF | 33.000 | 13.000 | 5.000 | 31.000 | 27.000 | 20.000 | 21.500 | 23.964 | 80.000 |
| SRDCF | 52.000 | 20.000 | 8.000 | 47.000 | 27.000 | 28.000 | 30.333 | 35.426 | 116.000 |
| Staple | 8.000 | 11.000 | 5.000 | 26.000 | 22.000 | 15.000 | 17.833 | 19.883 | 68.0000 |
| DSST | 103.000 | 45.000 | 6.000 | 76.000 | 32.000 | 36.000 | 49.667 | 63.072 | 206.000 |
| Method | All |
|---|---|
| Ours | 0.3943 |
| DeepSTRCF | 0.3723 |
| ECO | 0.3077 |
| SiamDW | 0.2925 |
| Staple | 0.2733 |
| UpdateNet | 0.2499 |
| DeepSRDCF | 0.2282 |
| SRDCF | 0.1621 |
| DSST | 0.0976 |
| Precision | Success | |
|---|---|---|
| 10 | 0.871 | 0.662 |
| 11 | 0.879 | 0.669 |
| 12 | 0.887 | 0.672 |
| 13 | 0.895 | 0.681 |
| 14 | 0.919 | 0.689 |
| 15 | 0.918 | 0.692 |
| 16 | 0.927 | 0.699 |
| 17 | 0.920 | 0.689 |
| 18 | 0.912 | 0.680 |
| 19 | 0.901 | 0.682 |
| 20 | 0.896 | 0.677 |
| Tracker | ASTCF | ASTCF-s | ASTCF-t | ASTCF-st |
|---|---|---|---|---|
| Precision (DP) | 0.927 | 0.867 | 0.915 | 0.802 |
| Success (AUC) | 0.699 | 0.652 | 0.689 | 0.601 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, L.; Feng, T.; Fu, Y.; Shen, C.; Hu, Z.; Qin, M.; Bai, X.; Zhao, S. Learning Adaptive Spatial Regularization and Temporal-Aware Correlation Filters for Visual Object Tracking. Mathematics 2022, 10, 4320. https://doi.org/10.3390/math10224320
Liu L, Feng T, Fu Y, Shen C, Hu Z, Qin M, Bai X, Zhao S. Learning Adaptive Spatial Regularization and Temporal-Aware Correlation Filters for Visual Object Tracking. Mathematics. 2022; 10(22):4320. https://doi.org/10.3390/math10224320
Chicago/Turabian StyleLiu, Liqiang, Tiantian Feng, Yanfang Fu, Chao Shen, Zhijuan Hu, Maoyuan Qin, Xiaojun Bai, and Shifeng Zhao. 2022. "Learning Adaptive Spatial Regularization and Temporal-Aware Correlation Filters for Visual Object Tracking" Mathematics 10, no. 22: 4320. https://doi.org/10.3390/math10224320
APA StyleLiu, L., Feng, T., Fu, Y., Shen, C., Hu, Z., Qin, M., Bai, X., & Zhao, S. (2022). Learning Adaptive Spatial Regularization and Temporal-Aware Correlation Filters for Visual Object Tracking. Mathematics, 10(22), 4320. https://doi.org/10.3390/math10224320