

Electric Vehicle Fire Risk Assessment Based on WBS-RBS and Fuzzy BN Coupling


Abstract
:1. Introduction
2. Materials and Methods
2.1. WBS-RBS Breakdown Structure
2.2. Bayesian Network Model
2.3. Construction of Fuzzy Bayesian Network
2.3.1. The Concept of Fuzzy Numbers
2.3.2. Fuzzy Number Processing Based on Expert Weight
2.3.3. Fuzzy Number Solution
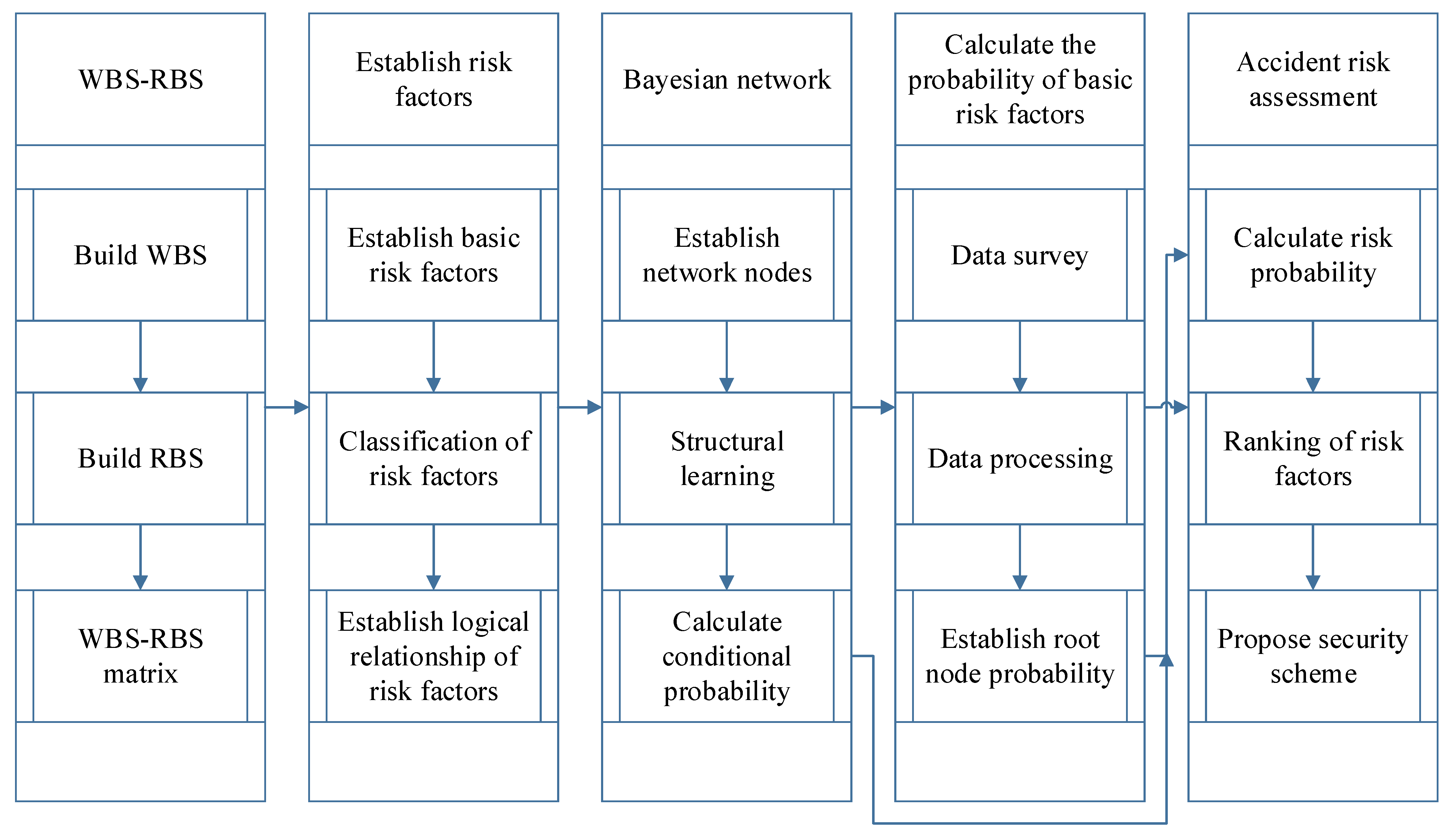
2.4. WBS-RBS-BN Analysis Process
- (1)
- Collect information and be familiar with the composition and operation mode of each major system of the electric vehicle;
- (2)
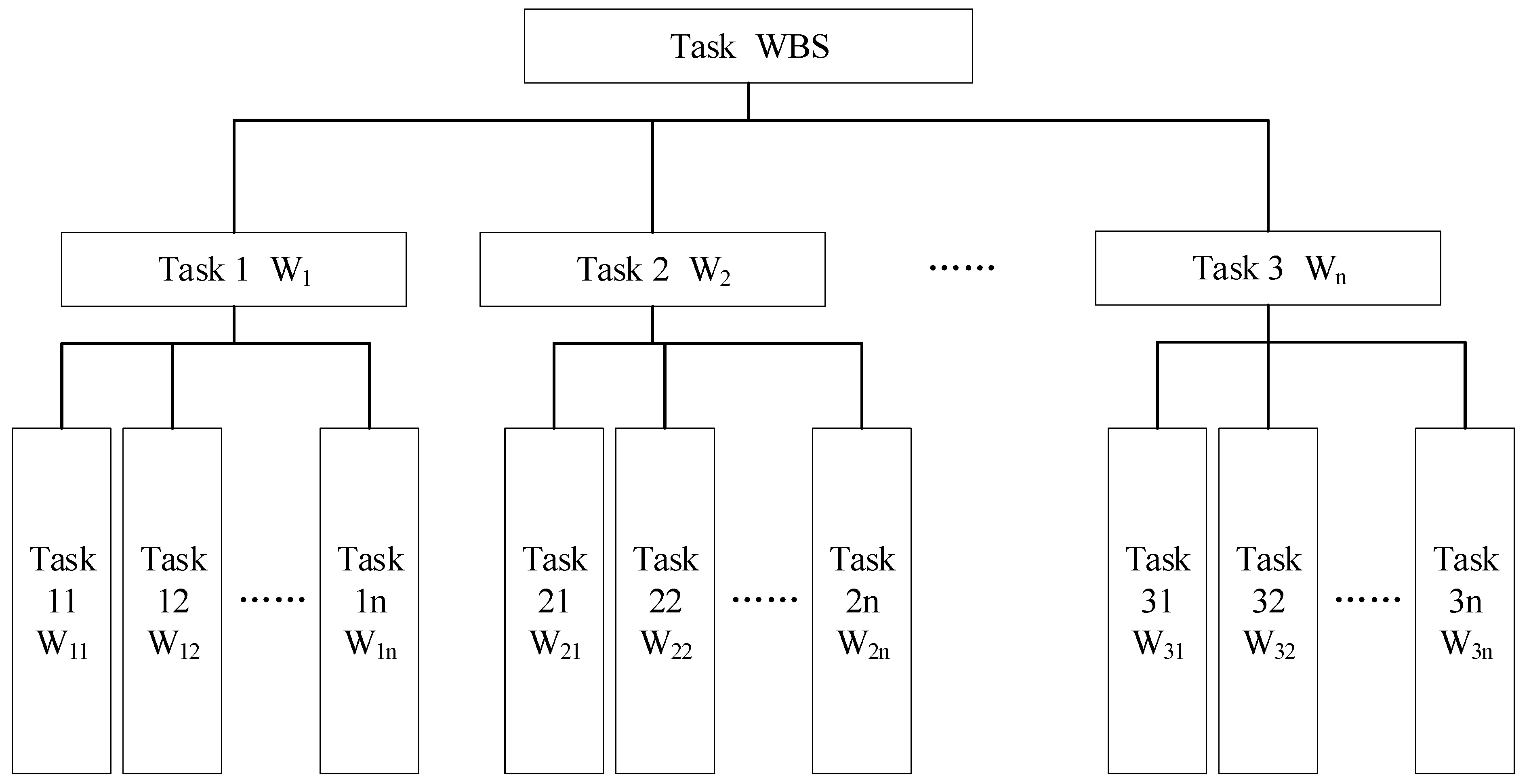
- The electric vehicle is decomposed at the system level according to the composition of each major system to obtain the WBS structure;
- (3)
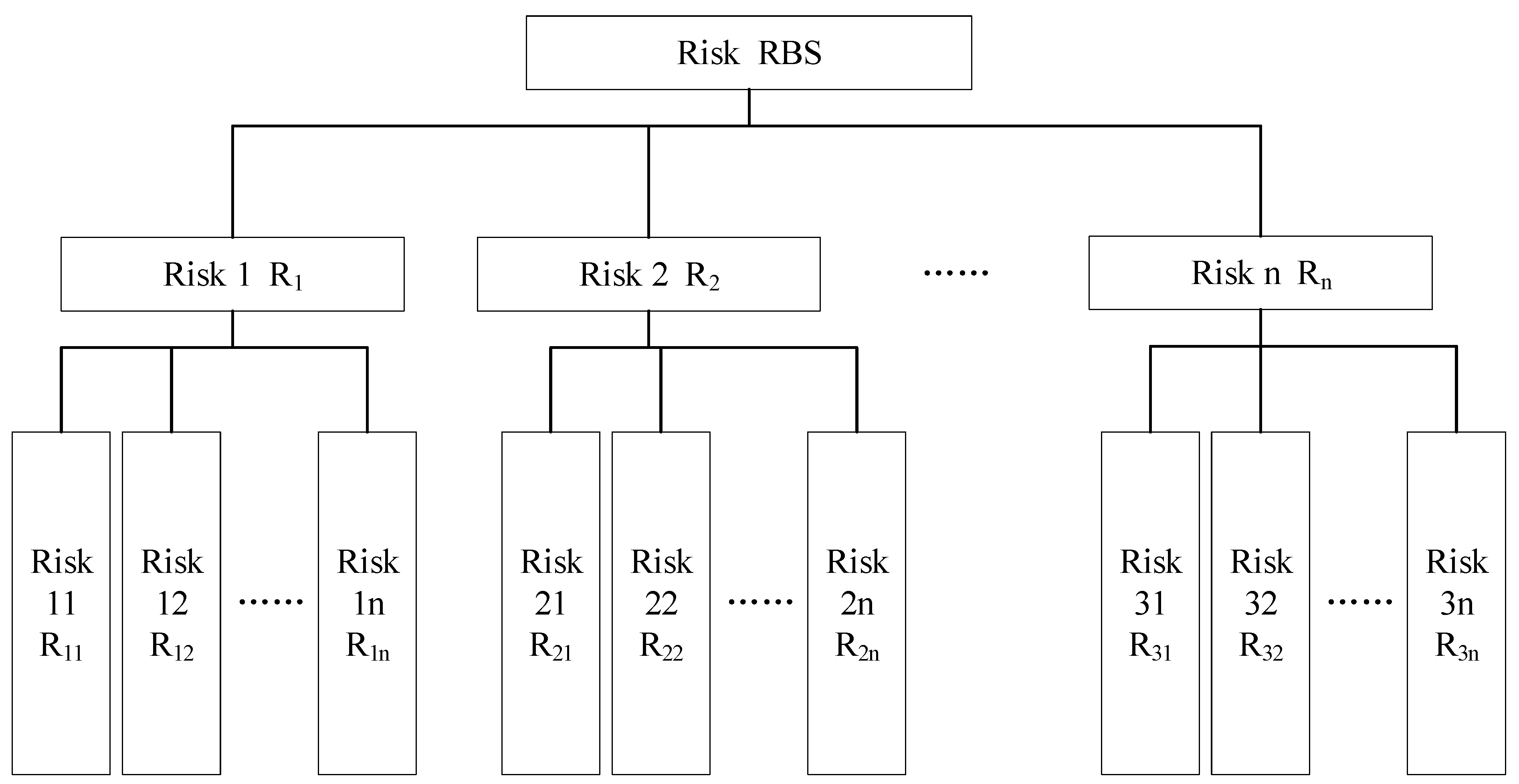
- The risk factors in the electric vehicle fire accident are decomposed into a risk hierarchy, and the RBS structure is obtained;
- (4)
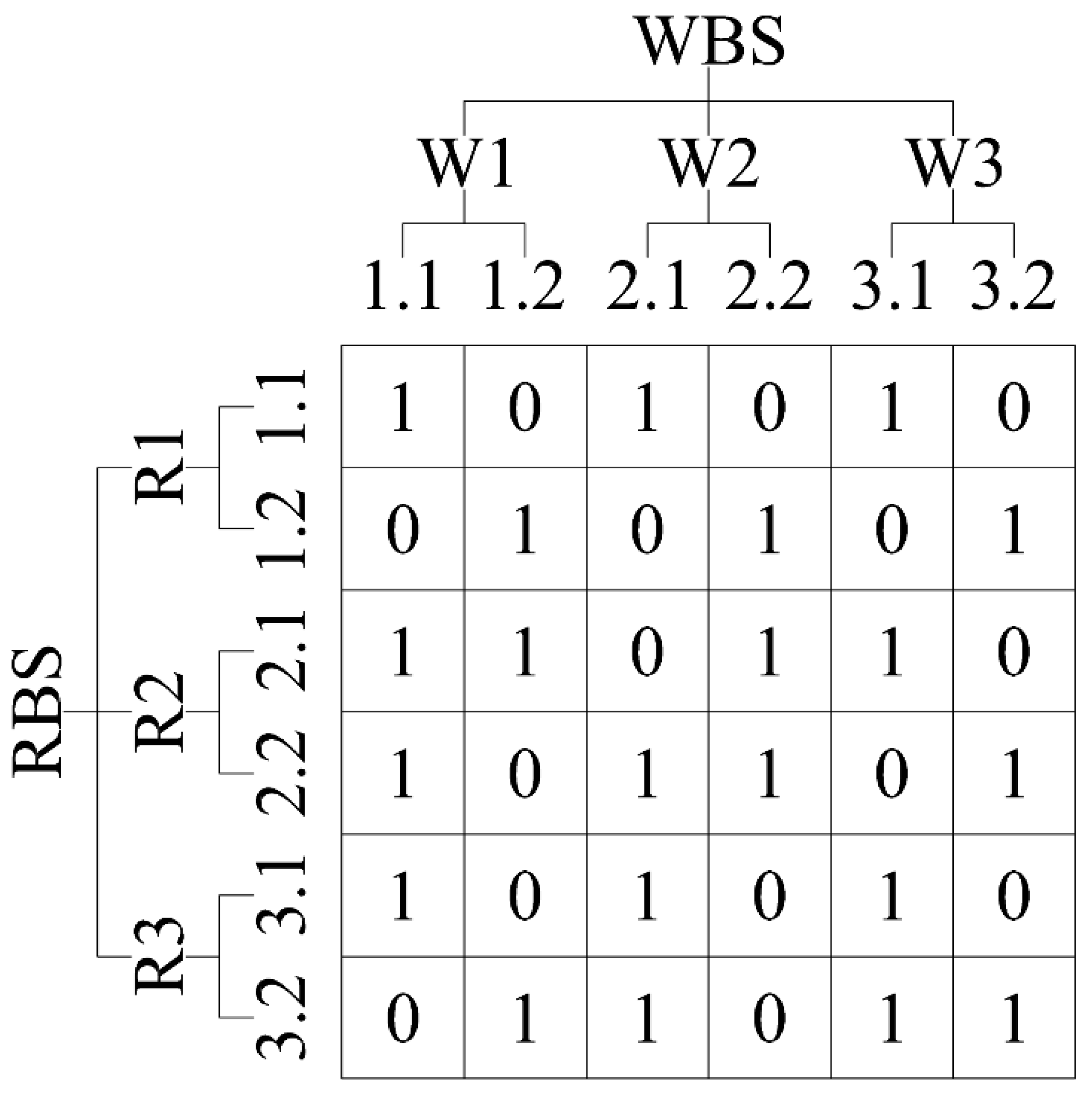
- The WBS-RBS matrix is obtained by taking the system structure obtained by WBS decomposition as the column and the risk factor set obtained by RBS decomposition as the row to analyze the risk events in the matrix;
- (5)
- The analyzed risk event is regarded as the parent node in the Bayesian network;
- (6)
- The risk event, target event, and the logical relationship of each event are transformed into the Bayesian network nodes and node connection relationship. Regarding historical data, combined with expert evaluation, the probability of various risk events is taken as the prior probability of the parent node in the Bayesian network;
- (7)
- Calculate the posterior probability, calculate the importance of risk factors, and infer the ranking of risk events according to the magnitude of posterior probability and the ranking of importance;
- (8)
- Take corresponding safety protection measures according to the sequence of inferred risk events;
3. Electric Vehicle Fire Risk Identification
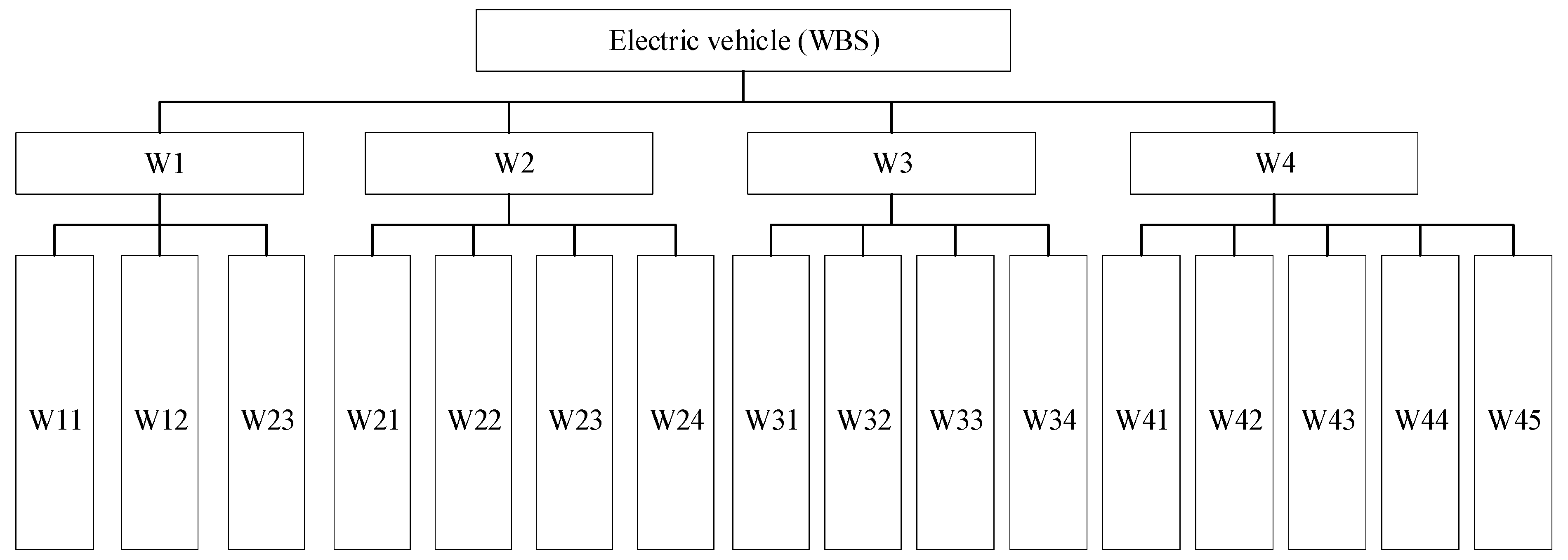
3.1. Construction of Electric Vehicle WBS Structure
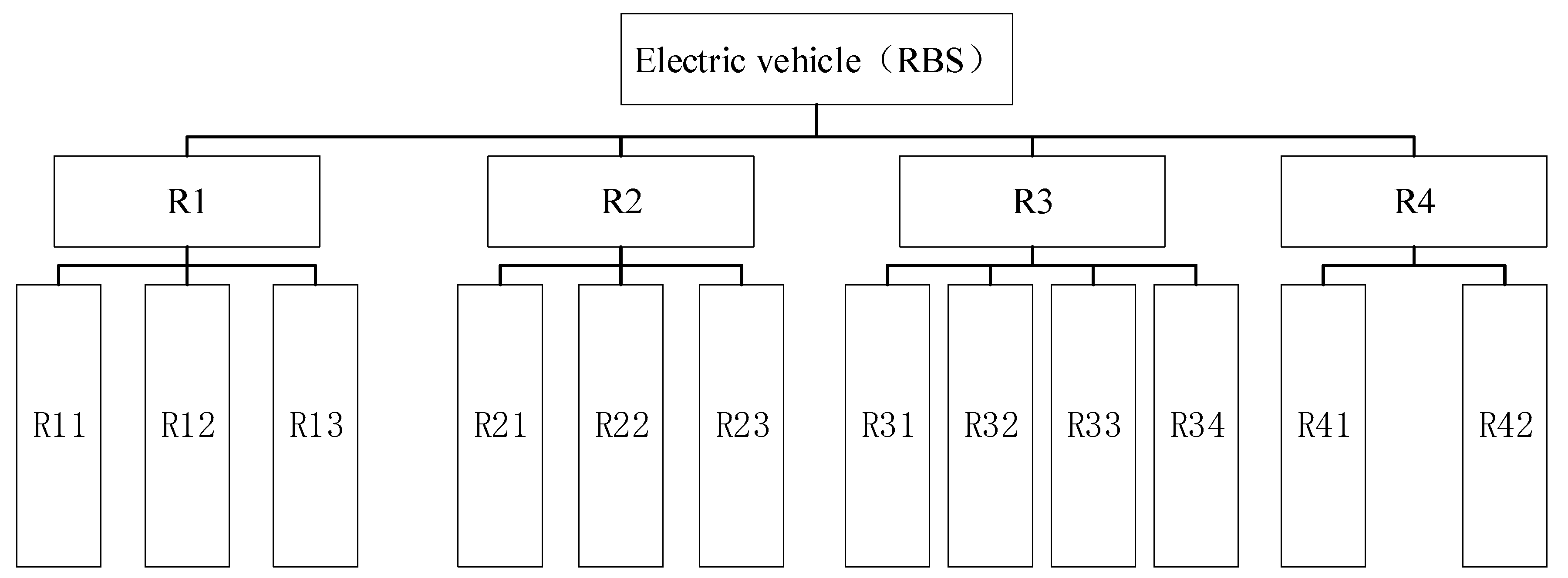
3.2. Building RBS Structure of the Electric Vehicle
3.3. WBS-RBS Matrix and Risk Identification of Electric Vehicle Fire
- (1)
- From the perspective of human factors, the risk factors that can cause electric vehicle fires are mainly divided into refitting and arson of the vehicle body, ignoring the early fire of the vehicle body, and not being equipped with fire-fighting equipment. Body modification and arson include body and instrument modification (W12R11, W13R11), power system modification (W21R11, W24R11), motor and transmission device modification (W33R11, W34R11), auxiliary equipment modification (W41R11, W42R11, W43R11, W44R11), ignition on the body (w12r12), battery damage arson (W21R12), and arson on the external structure of the body (W34R12, W43R12). The neglect of early fire includes the fire on the vehicle body (W12R13), the fire on the power supply system (W21R13, W24R13), fire occurring in the transmission system (W33R13, W34R13), and fire occurring in various electrical systems and equipment, and fire-fighting equipment (W12R13) was not equipped on the vehicle body;
- (2)
- Material factors include the ignition of the vehicle body and vehicle tire set (W12R21, W31R21) by an external fire source; the vehicle fire caused by external impact, including the impact of material on the vehicle body (W12R22); the damage of impact on power system (W21R22, W22R22, W23R22, W24R22); the damage of impact on transmission system; the vehicle out of control and fire (W33R22, W34R22, W41R22); the damage of impact on the electrical system; and the internal short circuit of vehicle electrical (W45R22). The failure of charging equipment includes the ignition of the vehicle body and vehicle tire (W12R23, W34R23) due to the fire of charging equipment and the fire caused by battery failure due to unqualified charging equipment (W21R23);
- (3)
- The machine factors include the fire caused by the congenital fault of the power supply due to the unqualified design (W21R31, W22R31, W23R31, W24R31), the fire caused by the operation error of the vehicle controller (W11R32) or the quality problem of the electrical equipment itself or the fault of long-term use (W31R32, W32R32, W33R32, W42R32, W43R32, W44R32, W45R32), the fire caused by short circuit of power transmission lines in the power system (W21R33, W24R33) and short circuit of internal power transmission lines in the vehicle body (W33R33, W42R33, W43R33, W44R33, W45R33), a high-temperature fire caused by blockage of vehicle body exhaust pipe (W12R34), and fire caused by long-term aging of power supply and electrical (W21R34, W42R34, W43R34, W44R34);
- (4)
- Environmental factors include a high temperature of the vehicle body (W12R41) caused by high-temperature weather, which leads to high temperature of the battery (W21R42) and excessive water accumulation on the road, which penetrates into the vehicle body (W12R42), thus soaking the battery and causing a fire (W21R42).
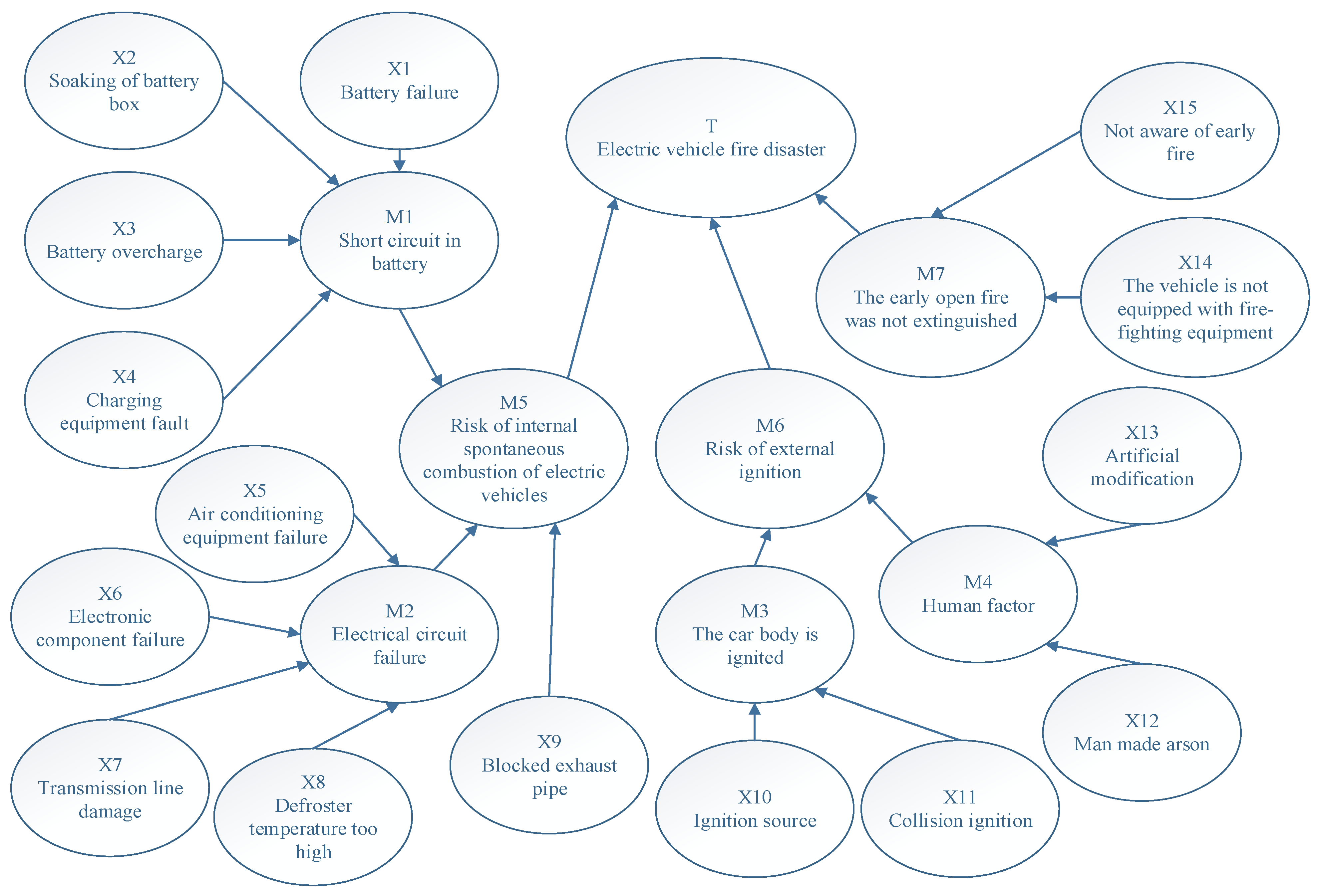
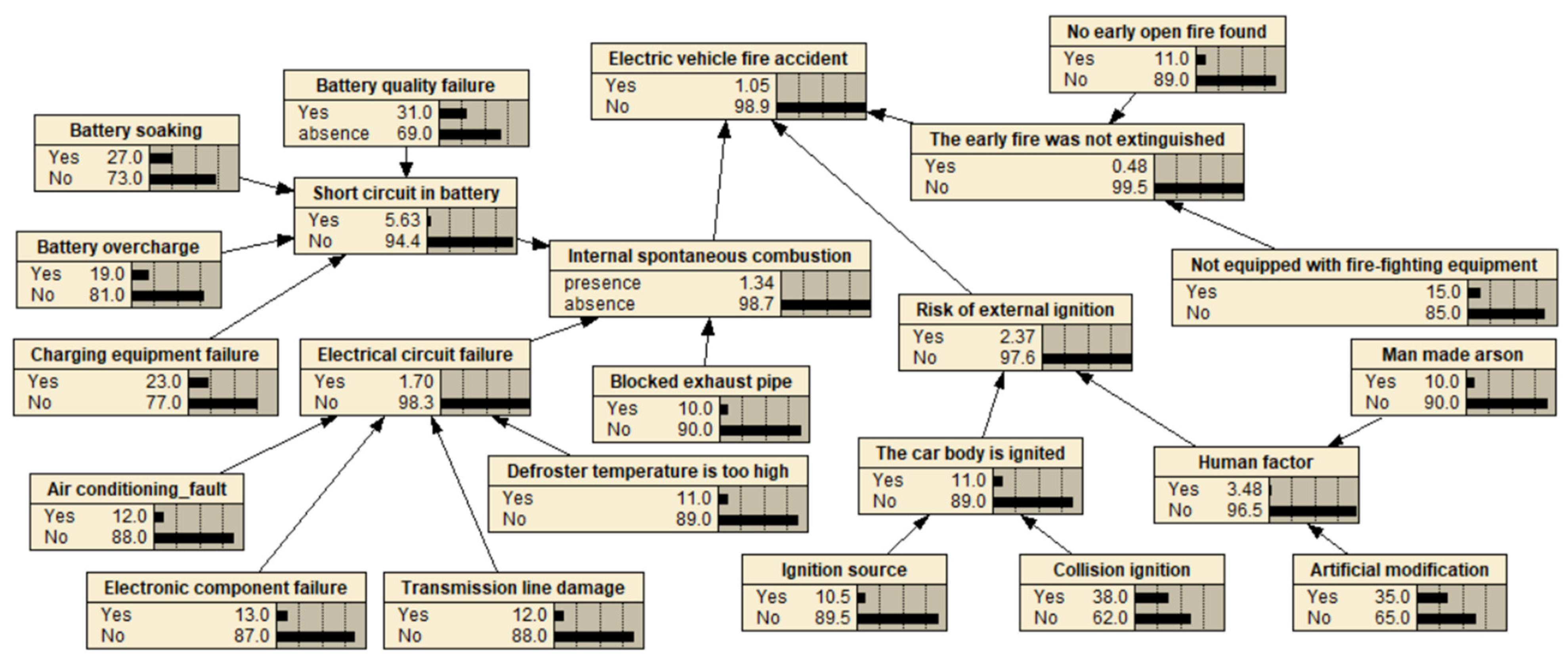
3.4. Bayesian Network Structure and Data Processing
4. Results and Discussion
4.1. Probability Analysis of Electric Vehicle Fire
4.2. Calculation of Bayesian Network
4.3. Importance Analysis
4.4. Safety Protection Measures
5. Conclusions
- (1)
- The WBS structure was constructed, and the electric vehicle was divided into four main systems: vehicle control system, power supply system, electric drive system, and auxiliary system;
- (2)
- The RBS structure was constructed, and four main risks in electric vehicle fire accidents were obtained: human factors, physical factors, mechanical factors, and environmental factors. On this basis, 12 lower-level risks were divided;
- (3)
- The WBS-RBS coupling matrix was constructed to identify 15 risk factors that can lead to an electric vehicle fire in different systems of electric vehicles;
- (4)
- The concept of a fuzzy set was combined with BN, and the prior probability and posterior probability of each risk factor were clarified by using the fuzzy BN. The importance of each risk factor was analyzed, and the conclusion was that external collision is the first risk factor leading to an electric vehicle fire, followed by battery failure, artificial modification, battery pack flooding, and charging equipment failure;
- (5)
- According to the four risk factors, the corresponding safety protection measures were proposed.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Risk Factor | Expert 1 | Expert 2 | Expert 3 | Expert 4 | Expert 5 |
|---|---|---|---|---|---|
| X1 | FL | L | FL | FL | FL |
| X2 | FL | L | FL | L | FL |
| X3 | L | L | FL | L | L |
| X9 | FL | L | FL | L | L |
| X5 | VL | VL | L | VL | L |
| X6 | L | L | VL | VL | L |
| X7 | L | VL | VL | L | VL |
| X8 | VL | L | VL | VL | VL |
| X9 | VL | VL | VL | VL | VL |
| X10 | L | L | L | L | L |
| X11 | FL | FL | M | FL | FL |
| X12 | VL | VL | VL | VL | VL |
| X13 | FL | FL | FL | FL | FL |
| X14 | L | L | L | L | L |
| X15 | VL | VL | L | VL | VL |
| Number | Risk Factors | Risk Frequency | Probability | Homogenization Probability |
|---|---|---|---|---|
| 1 | Battery failure | 11 | 9.02% | 15.08% |
| 2 | Battery soaking | 6 | 4.92% | 8.23% |
| 3 | Battery overcharge | 2 | 1.64% | 2.74% |
| 4 | Charging equipment ignition | 5 | 4.09% | 6.84% |
| 5 | Air conditioning fault | 3 | 2.46% | 4.11% |
| 6 | Electrical equipment failure | 4 | 3.28% | 5.48% |
| 7 | Transmission line damage | 5 | 4.10% | 6.86% |
| 8 | Defroster temperature too high | 1 | 0.82% | 1.37% |
| 9 | Blocked exhaust pipe | 1 | 0.82% | 1.37% |
| 10 | Ignition source | 3 | 1.62% | 2.71% |
| 11 | Collision ignition | 21 | 17.20% | 28.76% |
| 12 | Artificial modification | 7 | 5.74% | 9.60% |
| 13 | Man-made arson | 2 | 1.64% | 2.74% |
| 14 | The vehicle is not equipped with fire-fighting equipment | 1 | 0.82% | 1.37% |
| 15 | No one is aware of the fire | 2 | 1.64% | 2.74% |
| Node Number | Prior Probability |
|---|---|
| X1 | 0.31 |
| X2 | 0.27 |
| X3 | 0.19 |
| X4 | 0.23 |
| X5 | 0.12 |
| X6 | 0.13 |
| X7 | 0.12 |
| X8 | 0.11 |
| X9 | 0.10 |
| X10 | 0.105 |
| X11 | 0.38 |
| X12 | 0.10 |
| X13 | 0.35 |
| X14 | 0.15 |
| X15 | 0.11 |
| X1 | X2 | X3 | X4 | Yes | No |
|---|---|---|---|---|---|
| Yes | Yes | Yes | Yes | 10.62 | 89.38 |
| Yes | Yes | Yes | No | 9.20 | 90.80 |
| Yes | Yes | No | Yes | 10.39 | 89.61 |
| Yes | No | Yes | Yes | 8.57 | 91.43 |
| No | Yes | Yes | Yes | 3.71 | 96.29 |
| No | No | Yes | Yes | 1.65 | 98.35 |
| No | Yes | No | Yes | 3.48 | 96.52 |
| No | Yes | Yes | No | 2.29 | 97.71 |
| Yes | No | No | Yes | 8.34 | 91.66 |
| Yes | No | Yes | No | 7.14 | 92.86 |
| Yes | Yes | No | No | 8.97 | 91.03 |
| Yes | No | No | No | 15.08 | 84.92 |
| No | Yes | No | No | 8.23 | 91.77 |
| No | No | Yes | No | 2.74 | 97.26 |
| No | No | No | Yes | 6.84 | 93.16 |
| No | No | No | No | 0 | 100 |
| X5 | X6 | X7 | X8 | Yes | No |
|---|---|---|---|---|---|
| Yes | Yes | Yes | Yes | 5.38 | 94.62 |
| Yes | Yes | Yes | No | 5.27 | 94.73 |
| Yes | Yes | No | Yes | 2.74 | 97.26 |
| Yes | No | Yes | Yes | 3.69 | 96.31 |
| No | Yes | Yes | Yes | 4.43 | 95.57 |
| No | No | Yes | Yes | 2.74 | 97.26 |
| No | Yes | No | Yes | 1.79 | 98.21 |
| No | Yes | Yes | No | 4.32 | 95.68 |
| Yes | No | No | Yes | 1.05 | 98.95 |
| Yes | No | Yes | No | 3.89 | 96.11 |
| Yes | Yes | No | No | 2.63 | 97.37 |
| Yes | No | No | No | 4.11 | 95.89 |
| No | Yes | No | No | 5.48 | 94.52 |
| No | No | Yes | No | 6.86 | 93.14 |
| No | No | No | Yes | 1.37 | 98.63 |
| No | No | No | No | 0 | 100 |
| M1 | M2 | X9 | Yes | No |
|---|---|---|---|---|
| Yes | Yes | Yes | 15 | 85 |
| Yes | Yes | No | 14.95 | 85.05 |
| Yes | No | Yes | 10.22 | 89.78 |
| No | Yes | Yes | 4.82 | 95.18 |
| Yes | No | No | 19.67 | 80.33 |
| No | Yes | No | 10.66 | 89.34 |
| No | No | Yes | 1.37 | 98.63 |
| No | No | No | 0 | 100 |
| X10 | X11 | Yes | No |
|---|---|---|---|
| Yes | Yes | 25.50 | 74.50 |
| Yes | No | 2.71 | 97.29 |
| No | Yes | 28.76 | 71.24 |
| No | No | 0 | 100 |
| X12 | X13 | Yes | No |
|---|---|---|---|
| Yes | Yes | 8.08 | 91.92 |
| Yes | No | 9.60 | 90.40 |
| No | Yes | 2.74 | 97.26 |
| No | No | 0 | 100 |
| M3 | M4 | Yes | No |
|---|---|---|---|
| Yes | Yes | 16.32 | 83.68 |
| Yes | No | 19.67 | 80.33 |
| No | Yes | 7.38 | 92.62 |
| No | No | 0 | 100 |
| X14 | X15 | Yes | No |
|---|---|---|---|
| Yes | Yes | 2.28 | 97.72 |
| Yes | No | 1.37 | 98.63 |
| No | Yes | 2.74 | 97.26 |
| No | No | 100 | 0 |
| M5 | M6 | M7 | Yes | No |
|---|---|---|---|---|
| Yes | Yes | Yes | 17.08 | 85 |
| Yes | Yes | No | 17.01 | 85.05 |
| Yes | No | Yes | 9.76 | 89.78 |
| No | Yes | Yes | 7.38 | 95.18 |
| Yes | No | No | 31.15 | 80.33 |
| No | Yes | No | 27.05 | 89.34 |
| No | No | Yes | 2.46 | 98.63 |
| No | No | No | 0 | 100 |
References
- Lao, Z.; Zhang, Y.; Qiu, J.; Liang, Z.; Lian, B. Fire detection system for lithium battery of electric vehicle based on multi-sensor data fusion. Autom. Inf. Eng. 2021, 42, 16–19. [Google Scholar]
- Lv, Z.; Jiang, T.; Xiao, C. Experimental study on thermal diffusion of pure electric vehicle lithium ion power battery. China Auto 2021, 8, 24–30. [Google Scholar]
- Gao, Q.; Wang, H.; Liu, Y.; Jin, S.; Chen, Y. Experimental analysis on spray mode of power battery emergency cooling. J. Jilin Univ. (Eng. Technol. Ed.) 2021, 52, 1–9. [Google Scholar] [CrossRef]
- Chang, R.; Zheng, B.; Feng, X.; Xu, C.; Wang, H.; Chen, L.; Wang, Y. Experimental Study on the Effects of Thermal Insulation Layers on the PropagationCharacteristics of Thermal Runaway in Lithiumion Battery Module. Automot. Eng. 2021, 43, 1448–1456. [Google Scholar] [CrossRef]
- Xie, J.; Shao, J.; Huang, Z.; Wang, F.; Meng, X. Seal Structure Design of Power Battery Box. Auto Time 2021, 126–127. [Google Scholar]
- Sun, Z.; Chen, L.; Bu, X.; Liu, P.; Liu, S. Study on performance evolution of power battery after mechanical damage caused by extrusion. Chin. J. Power Sources 2020, 44, 964–966+1039. [Google Scholar]
- Yu, J.; Yang, X.; Zhang, X. Discussion on crash accident characteristics and battery restraint safety design of electric vehicles. Mach. Build. Autom. 2016, 45, 63–65. [Google Scholar] [CrossRef]
- Huang, M.; Lei, Z.; Sun, H.; Chen, X. Topology optimization method for Crashworthiness of frontal anti-collision structure of pure electric vehicle. J. Hefei Univ. Technol. (Nat. Sci.) 2019, 42, 7–12. [Google Scholar]
- Zhang, Y.; Li, B.; Yan, X.; Wang, L.; Jiang, L.; Diao, X.; Li, T. Monitoring and early warning method of EV charging failure based on a battery model. Power Syst. Prot. Control 2021, 49, 143–154. [Google Scholar] [CrossRef]
- Spotnitz, R.; Franklin, J. Abuse behavior of high-power, lithium-ion cells. J. Power Sources 2003, 113, 81–100. [Google Scholar] [CrossRef]
- Fleischhammer, M.; Waldmann, T.; Bisle, G.; Hogg, B.-I.; Wohlfahrt-Mehrens, M. Interaction of cyclic ageing at high-rate and low temperatures and safety in lithium-ion batteries. J. Power Sources 2015, 274, 432–439. [Google Scholar] [CrossRef]
- Pannala, S.; Turner, J.A.; Allu, S.; Elwasif, W.R.; Kalnaus, S.; Simunovic, S.; Kumar, A.; Billings, J.J.; Wang, H.; Nanda, J. Multiscale modeling and characterization for performance and safety of lithium-ion batteries. J. Appl. Phys. 2015, 118, 072017. [Google Scholar] [CrossRef]
- Van den Broek, F.; Poll, E.; Vieira, B. Securing the Information Infrastructure for EV Charging. In Proceedings of the 7th International Conference on Wireless and Satellite Systems (WiSATS), Bradford, UK, 6–7 July 2015; pp. 61–74. [Google Scholar]
- Wang, X.; Niu, L.; Huang, W.; Jiang, J. Electrical and safety performance evaluation of electric vehicle chargers. Chin. J. Power Sources 2014, 38, 734–736+744. [Google Scholar]
- Zhao, M.; Zhang, N.; Zhang, H.; Chen, L. Analysis of Safety Evaluation on EV Battery Replacement Station Based on Grey Theory. Power Syst. Clean Energy 2017, 33, 103–106+114. [Google Scholar]
- Yin, A.; Zuo, F.; Yang, L.; Li, Z. Research on Fault Diagnosis of Pure Electric Vehicle Power Battery Based on Fuzzy Algorithm. Modern Vehicle Power 2019, 1–6. [Google Scholar] [CrossRef]
- Abdurahim, M.; Wang, Y.; Xiao, L.; Dong, H.; Huang, G. Electric Vehicle Safety Evaluation Based on Fuzzy Analytic Hierarchy Process. Stand. Sci. 2018, 45–52. [Google Scholar] [CrossRef]
- He, Z.; Guo, J.; Xu, J. On the safety risk assessment of the multimodal transportation network based on the WBS-RBS and PFWA operator. J. Saf. Environ. 2020, 20, 441–446. [Google Scholar] [CrossRef]
- Xie, J.; Xiao, L.; Wang, Q.; Yang, K.; Wang, Y. Risk assessment of subsea umbilical installation based on WBS-RBS and FAHP. J. Saf. Environ. 2021, 1–9. [Google Scholar] [CrossRef]
- Lu, Y.; Li, Q.; Zhou, Z. Safety risk prediction of subway operation based on Fuzzy Bayesian network. J. Southeast Univ. (Nat. Sci. Ed.) 2010, 40, 1110–1114. [Google Scholar]
- Song, Y.; Ma, L.; Yang, L.; Jiang, X. Business interruption risk analysis based on fuzzy BN: A case study of flood disaster. China Saf. Sci. J. 2019, 29, 1–6. [Google Scholar] [CrossRef]
- Das, M.; Ghosh, S.K. FB-STEP: A Fuzzy Bayesian Network based Data-Driven Framework for Spatio-temporal Prediction of Climatological Time Series Data. Expert Syst. Appl. 2018, 117, 211–227. [Google Scholar] [CrossRef]
- Rafele, C.; Hillson, D.; Grimaldi, S. Understanding Project Risk Exposure Using the Two-Dimensional Risk Breakdown Matrix; Project Management Institute: Newtown Square, PA, USA, 2005. [Google Scholar]
- Ye, M. Application of work breakdown structure in Faurecia project management. Proj. Manag. Technol. 2008, 205–207. [Google Scholar]
- Zhang, Z.; Wang, W. Improvement and application of project risk identification method based on WBS-RBS matrix. Proj. Manag. Technol. 2010, 8, 74–78. [Google Scholar]
- Fang, B. Risk identification and evaluation of intelligent die casting Island integration project. Master’s Thesis, College of engineering management and information technology, University of Chinese Academy of Sciences, Beijing, China, 2016. [Google Scholar]
- Cui, P.; Chen, X.; Shan, C.; Cao, Y.; Hu, Y.; Wang, X.; Zhang, T. Risk Identification and Analysis of Grain StorageOperation Based on WBS -R BS and BN. J. Chin. Cereals Oils Assoc. 2019, 34, 82–89. [Google Scholar]
- Guo, W.; Wang, H. Risk assessment of tunnel construction by using fuzzy comprehensive evaluation method based on bayesian networks. J. Railw. Sci. Eng. 2016, 13, 401–406. [Google Scholar] [CrossRef]
- Li, Z.; Sun, J.; Chen, L. Risk assessment for tunnel collapse based on fault tree analysis and Bayesian network. Coal Eng. 2020, 52, 130–136. [Google Scholar]
- Wang, J. Commercial bank comprehensive risk early warning system based on Bayesian network. Master’s Thesis, Chongqing University, Chongqing, China, 2011. [Google Scholar]
- Zhong, F.; Zhang, H.; Jia, H. Evaluation of Parking Pricing Policy Based on Bayesian Network. J. South China Univ. Technol. (Nat. Sci. Ed.) 2010, 38, 78–83. [Google Scholar]
- Liu, G.; Li, B.; Xu, J.; Xia, X.; Zhang, Y. Application of Bayesian network to identifying principal risk factors in deepwater well control. China Saf. Sci. J. 2015, 25, 157–163. [Google Scholar] [CrossRef]
- Gupta, M.M.; Ragade, R.K.; Fuzhong, Z.; Julian, S. A review of fuzzy set theory and Its Applications. Syst. Eng. Electron. 1981, 13–22. [Google Scholar]
- Wickens, C.D.; Hollands, J.; Nbury, S.; Rasuraman, R. Engineering Psychology and Human Performance; HarperCollins Publishers: New York, NY, USA, 1992; pp. 211–257. [Google Scholar] [CrossRef]
- Wang, Y.; Xu, K.; Li, L.; Zhang, J. Study on Hydrogen Fire and Explosion Accident in Battery-Charging Area Based on WBS-RBS-BN. J. Northeast. Univ. (Nat. Sci.) 2018, 39, 886–891. [Google Scholar]
- Shujie, L.; Xiangfang, L.; Yue, Z.; Jianchun, F. Reliability analysis of deepwater drilling safety barrier based on Bayesian-LOPA method. J. Saf. Sci. Technol. 2014, 10, 187–191. [Google Scholar]
- Wang, G.; Yu, H.; He, E.; Li, J. Design of Front Bottom Collision Condition and Optimization battery Pack Protection for Electric Vehicles. Chin. J. Automot. Eng. 2022, 12, 294–300. [Google Scholar]
- Li, N.; Wei, D.; Cao, Y.; Tian, B.; Li, J. Obstacle avoidance control algorithm for self-driving electric vehicles. Chin. J. Sci. Instrum. 2021, 42, 199–207. [Google Scholar] [CrossRef]
- Su, X.; Zhuang, Y.; Dai, H. Study on risk of new energy vehicle burning-explosion and control measure. China Saf. Sci. J. 2018, 28, 92–98. [Google Scholar] [CrossRef]

| Fuzzy Numbers | Cut Set |
|---|---|
| fVL = (0, 0, 0.1, 0.2) | fλVL = [0.1λ + 0, −0.1λ + 0.2] |
| fL = (0.1, 0.2, 0.3) | fλL = [0.1λ + 0.1, −0.1λ + 0.2] |
| fFL = (0.2, 0.3, 0.4, 0.5) | fλFL = [0.1λ + 0.2, −0.1λ + 0.5] |
| fM = (0.4, 0.5, 0.6) | fλM = [0.1λ + 0.4, −0.1λ + 0.6] |
| fFH = (0.5, 0.6, 0.7, 0.8) | fλFH = [0.1λ + 0.5, −0.1λ + 0.8] |
| fH = (0.7, 0.8, 0.9) | fλH = [0.1λ + 0.7, −0.1λ + 0.9] |
| fVH = (0.8, 0.9, 1.0) | fλVH = [0.1λ + 0.8, −0.1λ + 1.0] |
| Number | System Code | System Name |
|---|---|---|
| 1 | W1 | Vehicle control system |
| 2 | W1 | The power supply system |
| 3 | W3 | Electric drive system |
| 4 | W4 | Auxiliary system |
| 5 | W11 | Vehicle controller |
| 6 | W12 | Car body |
| 7 | W13 | Instrument |
| 8 | W21 | Battery |
| 9 | W22 | Power management system |
| 10 | W23 | Battery charger |
| 11 | W24 | Auxiliary power supply |
| 12 | W31 | Motor controller |
| 13 | W32 | Power converter |
| 14 | W33 | Motor |
| 15 | W34 | Mechanical transmission device and wheelset |
| 16 | W41 | Power steering system |
| 17 | W42 | Air conditioning unit |
| 18 | W43 | lighting unit |
| 19 | W44 | Defrosting unit |
| 20 | W45 | The auxiliary electrical and electronic system |
| Number | Risk Number | Risk Name |
|---|---|---|
| 1 | R1 | Human factors |
| 2 | R2 | Object factor |
| 3 | R3 | Machine factor |
| 4 | R4 | Environmental factor |
| 5 | R11 | Weak awareness of human security |
| 6 | R12 | Human illegal and criminal acts |
| 7 | R13 | Fire not found in time |
| 8 | R21 | External hot object |
| 9 | R22 | Objects with collision risk |
| 10 | R23 | Unqualified charging equipment |
| 11 | R31 | Substandard power supply system |
| 12 | R32 | Unqualified electrical equipment |
| 13 | R33 | Unqualified transmission equipment |
| 14 | R34 | Vehicle parts aging |
| 15 | R41 | Severe weather conditions |
| 16 | R42 | Poor driving conditions |
| RBS | WBS | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| W1 | W2 | W3 | W4 | ||||||||||||||
| W 11 | W 12 | W 13 | W 21 | W 22 | W 23 | W 24 | W 31 | W 32 | W 33 | W 34 | W 41 | W 42 | W 43 | W 44 | W 45 | ||
| R1 | R11 | 0 | 1 | 1 | 1 | 0 | 0 | 1 | 0 | 0 | 1 | 1 | 0 | 1 | 1 | 1 | 1 |
| R12 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | |
| R13 | 0 | 1 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 1 | 1 | 0 | 1 | 1 | 0 | 1 | |
| R2 | R21 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 |
| R22 | 0 | 1 | 0 | 1 | 1 | 1 | 1 | 0 | 0 | 1 | 1 | 1 | 0 | 0 | 0 | 1 | |
| R23 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | |
| R3 | R31 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 |
| R32 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 0 | 0 | 1 | 1 | 1 | 1 | |
| R33 | 0 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 1 | 1 | 1 | 1 | |
| R34 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 0 | |
| R4 | R41 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| R42 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| Node Number | Risk Factors | Prior Probability | Posterior Probability |
|---|---|---|---|
| X1 | Battery quality failure | 0.310 | 0.406 |
| X2 | Battery soaking | 0.270 | 0.293 |
| X3 | Battery overcharge | 0.190 | 0.176 |
| X4 | Charging equipment failure | 0.230 | 0.239 |
| X5 | Air conditioning fault | 0.120 | 0.126 |
| X6 | Electrical equipment failure | 0.130 | 0.140 |
| X7 | Transmission line damage | 0.120 | 0.133 |
| X8 | Defroster temperature is too high | 0.110 | 0.111 |
| X9 | Blocked exhaust pipe | 0.100 | 0.117 |
| X10 | Ignition source | 0.105 | 0.107 |
| X11 | Collision ignition | 0.380 | 0.700 |
| X12 | Man-made arson | 0.100 | 0.102 |
| X13 | Artificial modification | 0.350 | 0.382 |
| X14 | No early open fire found | 0.150 | 0.152 |
| X15 | The vehicle is not equipped with fire-fighting equipment | 0.110 | 0.114 |
| Node Number | Critical Importance (ICrxi) | Node Number | Critical Importance (ICrxi) |
|---|---|---|---|
| X1 | 13.88 | X9 | 1.90 |
| X2 | 3.09 | X10 | 0.20 |
| X3 | 1.45 | X11 | 51.75 |
| X4 | 1.97 | X12 | 0.19 |
| X5 | 0.69 | X13 | 5.00 |
| X6 | 1.24 | X14 | 0.29 |
| X7 | 1.49 | X15 | 0.42 |
| X8 | 0.10 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.; Li, K.; Yang, S. Electric Vehicle Fire Risk Assessment Based on WBS-RBS and Fuzzy BN Coupling. Mathematics 2022, 10, 3799. https://doi.org/10.3390/math10203799
Chen J, Li K, Yang S. Electric Vehicle Fire Risk Assessment Based on WBS-RBS and Fuzzy BN Coupling. Mathematics. 2022; 10(20):3799. https://doi.org/10.3390/math10203799
Chicago/Turabian StyleChen, Jianhong, Kai Li, and Shan Yang. 2022. "Electric Vehicle Fire Risk Assessment Based on WBS-RBS and Fuzzy BN Coupling" Mathematics 10, no. 20: 3799. https://doi.org/10.3390/math10203799
APA StyleChen, J., Li, K., & Yang, S. (2022). Electric Vehicle Fire Risk Assessment Based on WBS-RBS and Fuzzy BN Coupling. Mathematics, 10(20), 3799. https://doi.org/10.3390/math10203799