
Automatic Control for Time Delay Markov Jump Systems under Polytopic Uncertainties

 ,
,  ,
,  ,
,  and
and 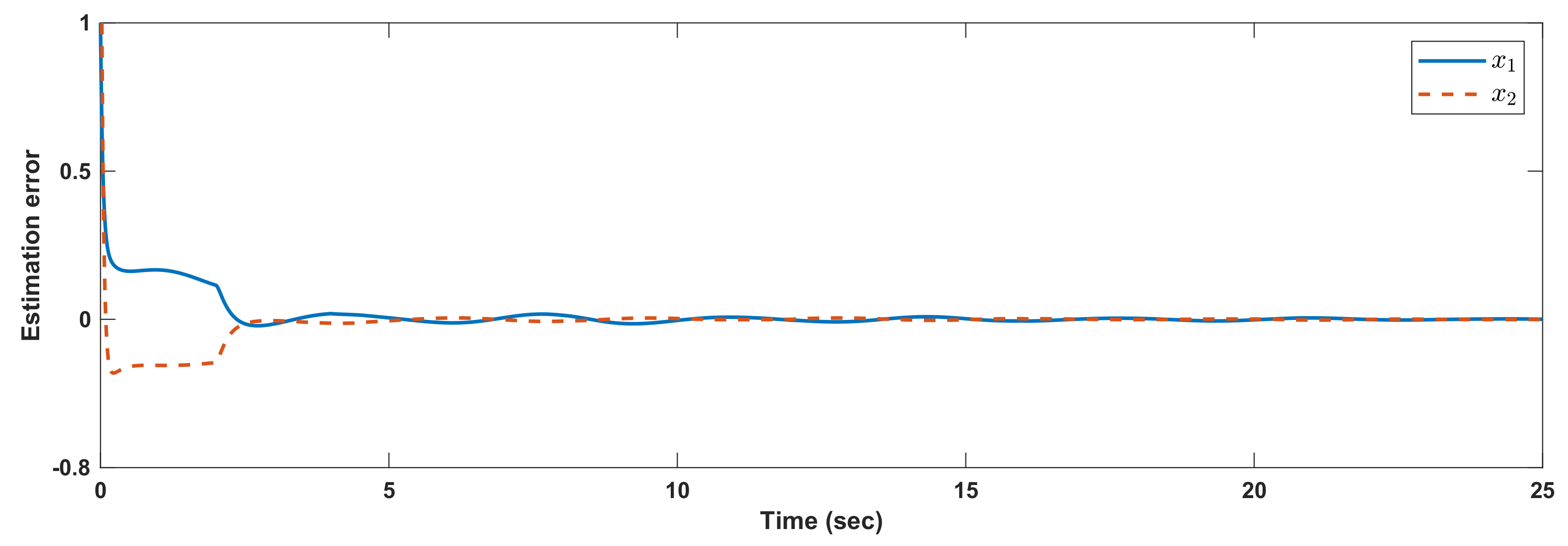{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Literature Review
3. Novelties
- Introducing a suitable Lyapunov-Krasovsky function to analyze the stability of the time delayed MJSs, and extract a sufficient condition in the LMI form to find a higher delay bound;
- Analyzing the stability of the MJSs in the presence of polytopic uncertainty and generalizing the obtained results; and
- Designing the controller using a mode-dependent state feedback approach and finding appropriate control gains in LMI form.
4. Problem Description
5. Preliminaries
- For , we can write and ;
- For a scalar we can write ;
- The following condition holds:
6. Main Results
State Feedback Controller
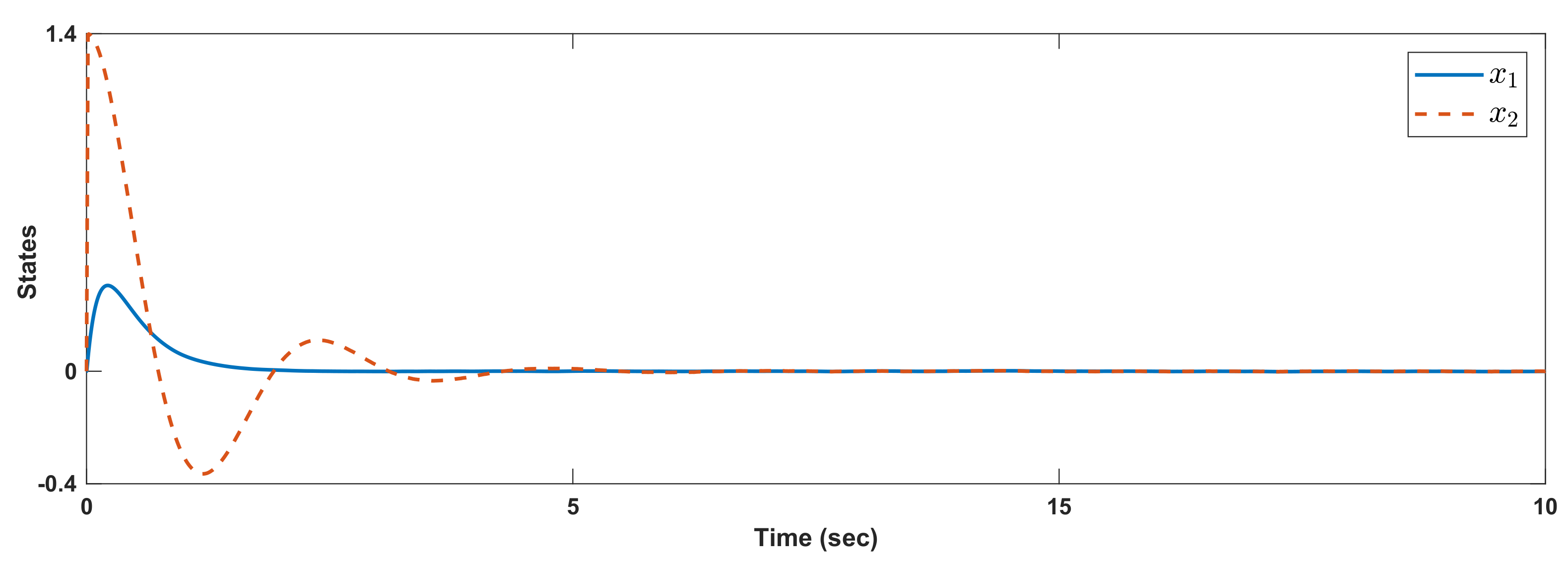
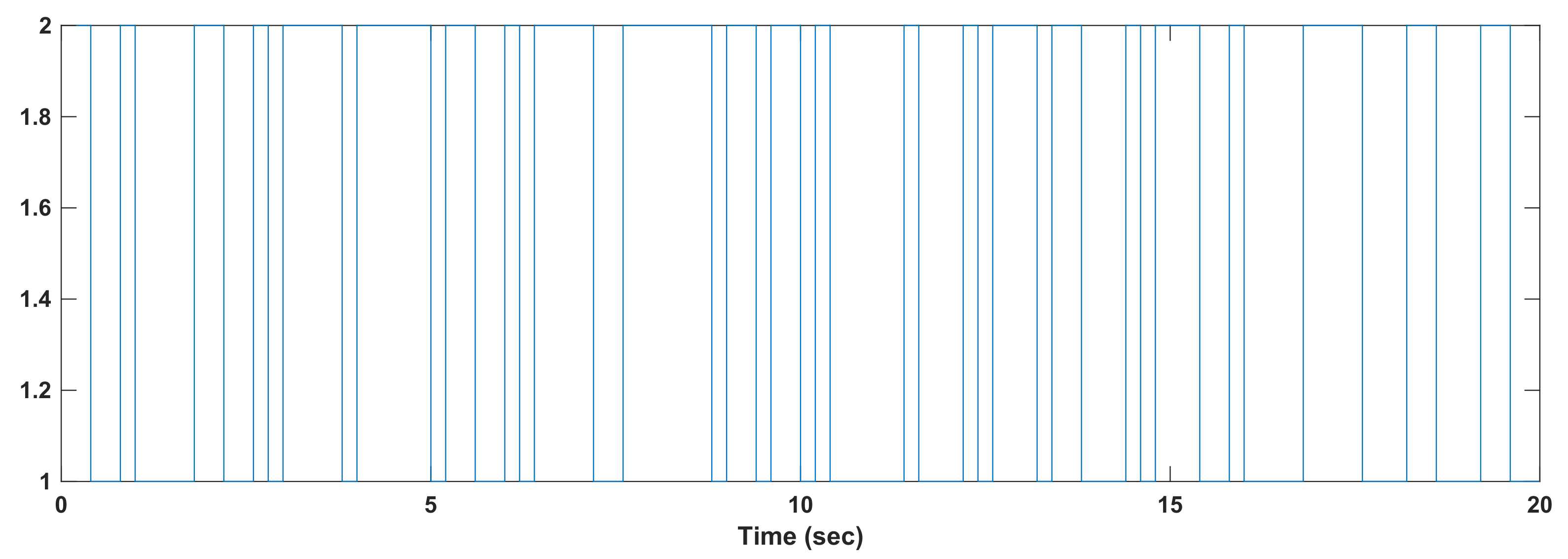
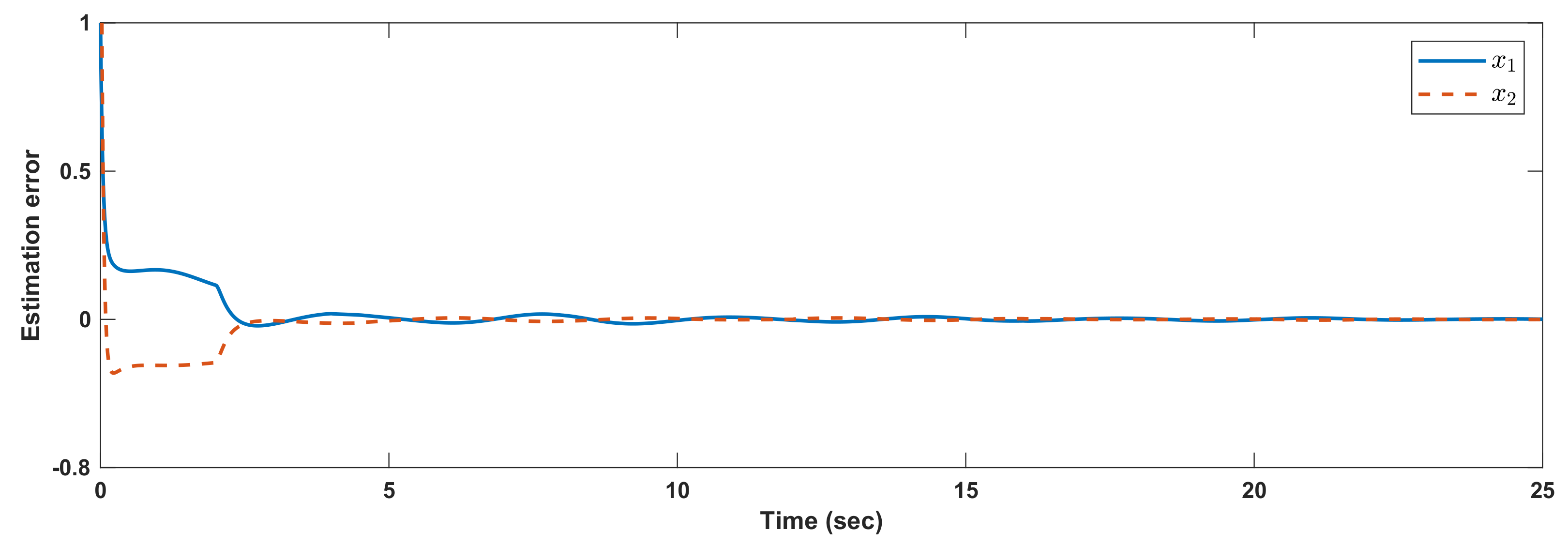
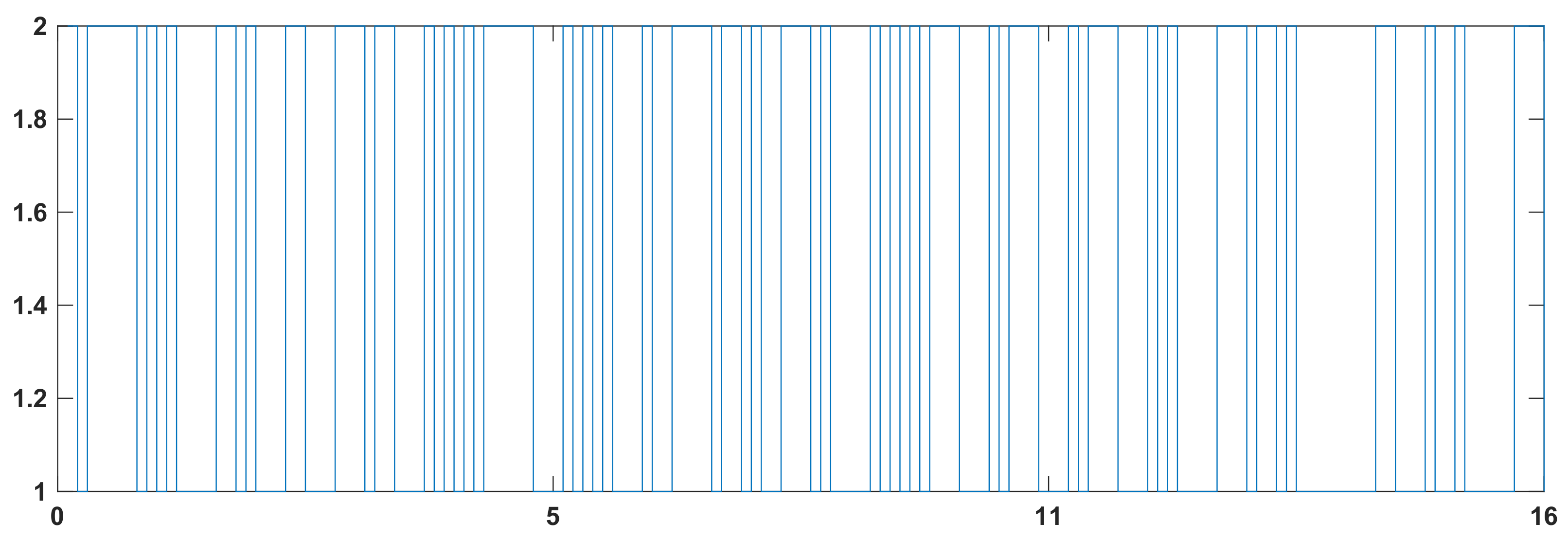
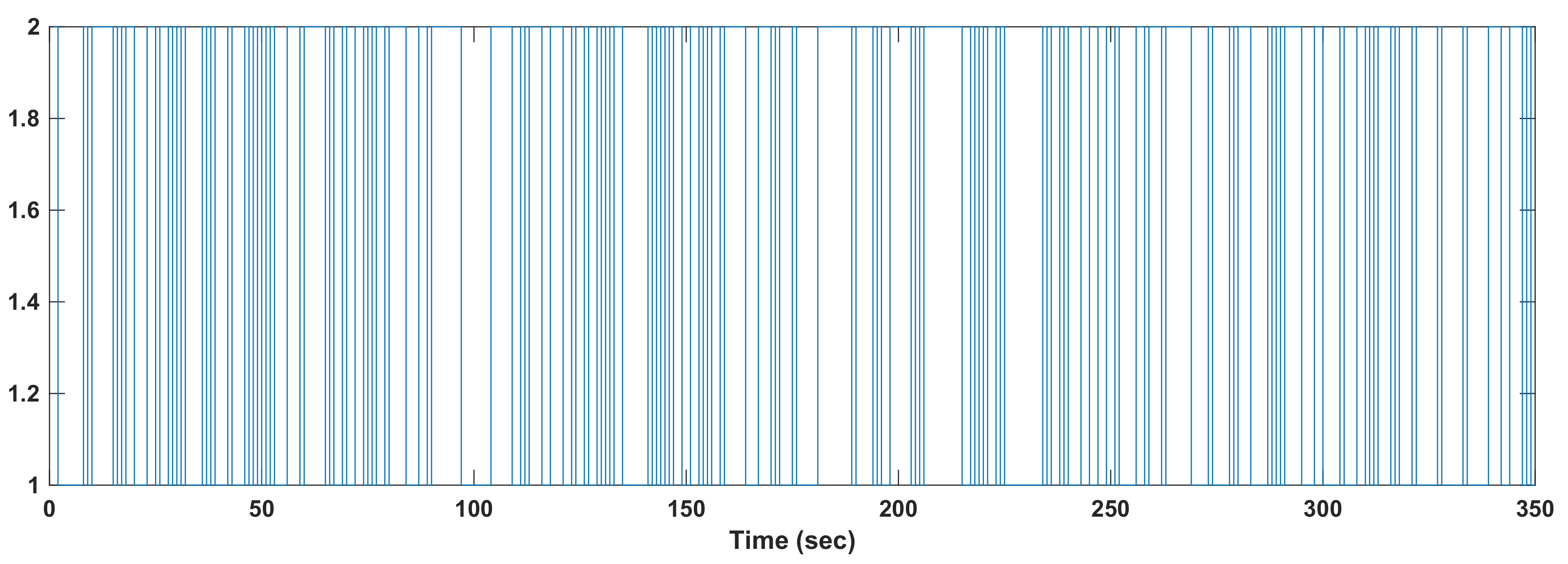
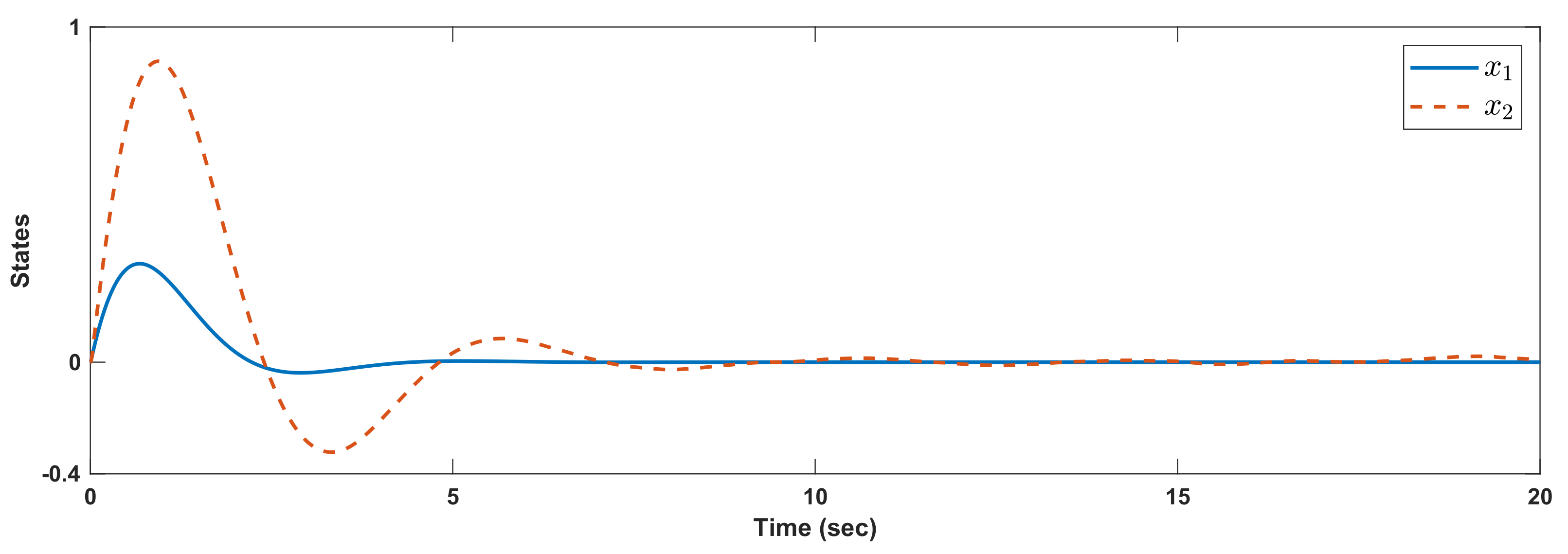
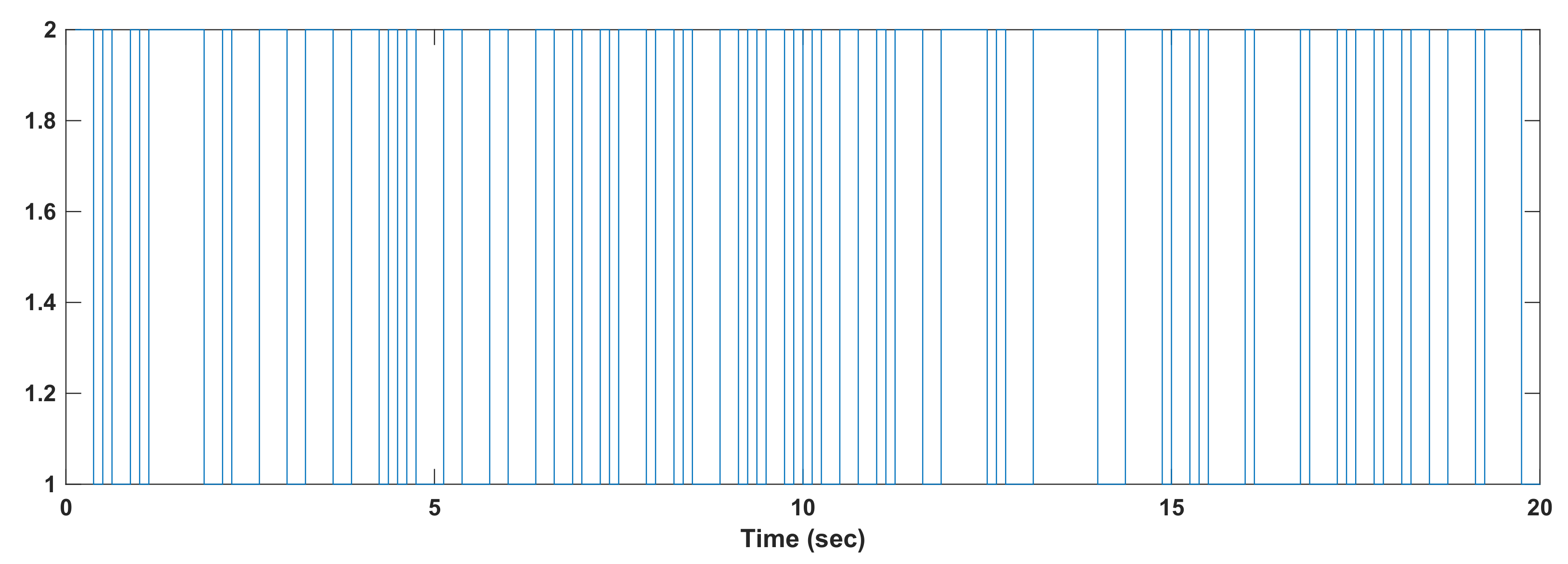
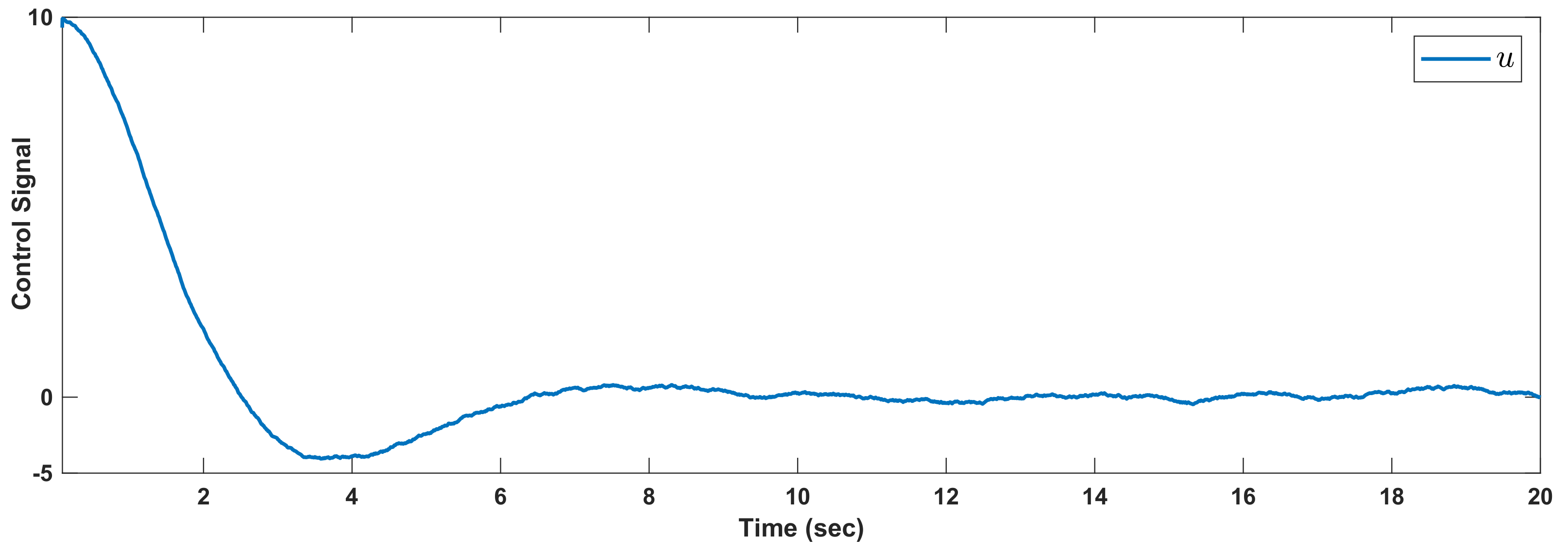
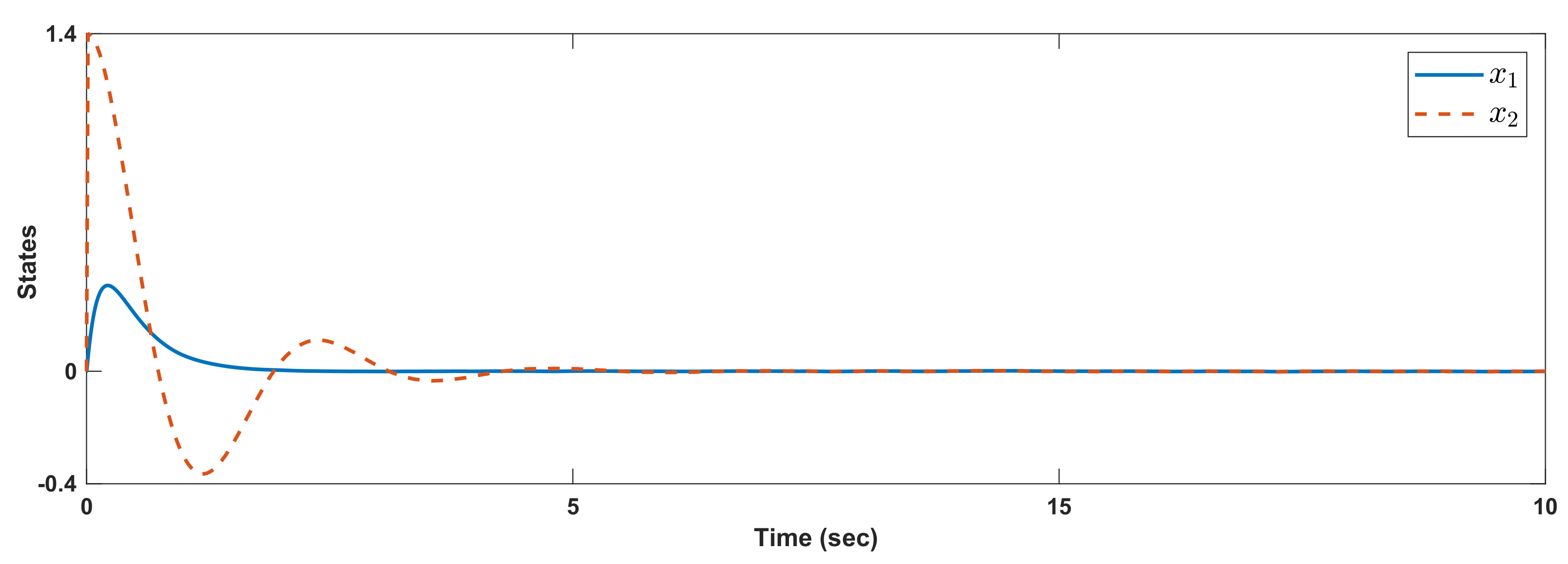
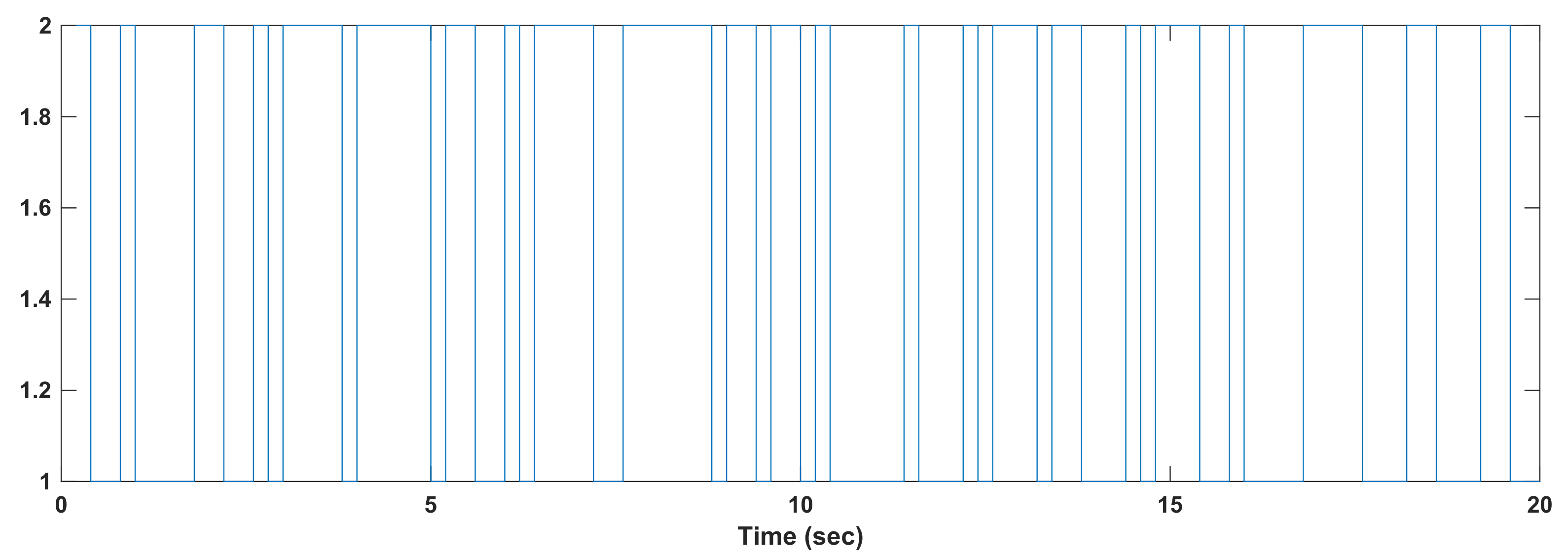
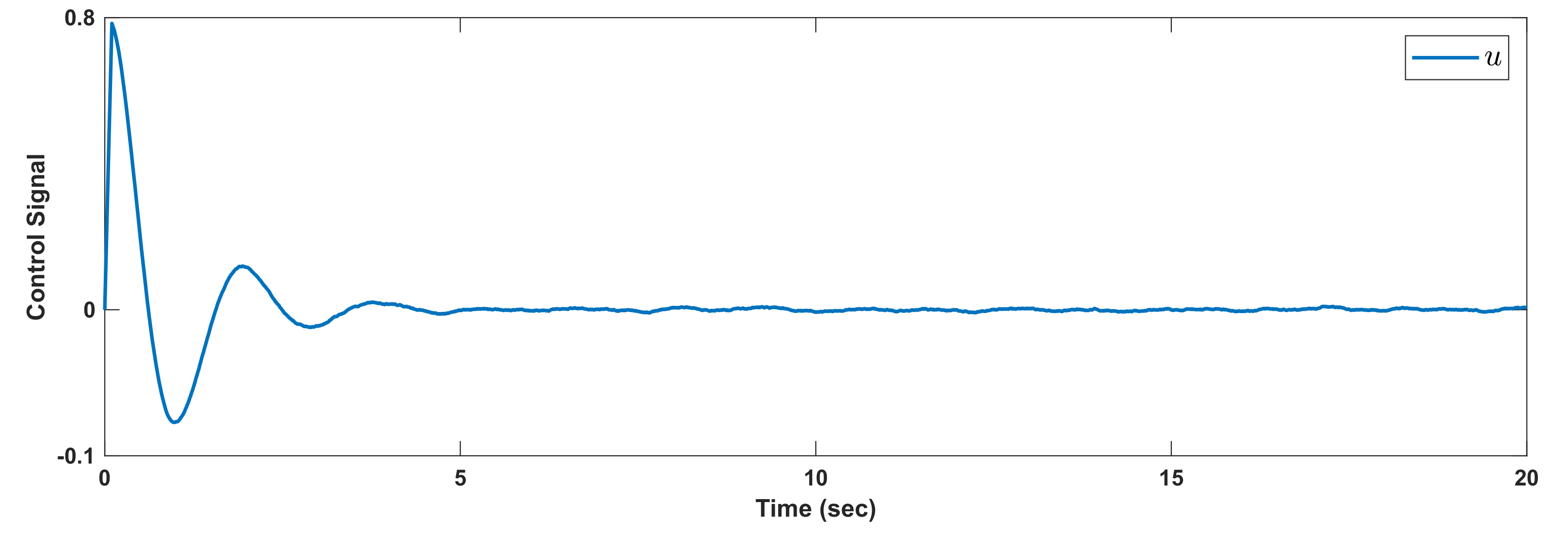
7. Simulations
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rao, R.; Huang, J.; Yang, X. Global Stabilization of a Single-Species Ecosystem with Markovian Jumping under Neumann Boundary Value Via Laplacian Semigroup. Mathematics 2021, 9, 2446. [Google Scholar] [CrossRef]
- Drăgan, V.; Ivanov, I.G.; Popa, I.L.; Bagdasar, O. Closed-Loop Nash Equilibrium in the Class of Piecewise Constant Strategies in a Linear State Feedback Form for Stochastic LQ Games. Mathematics 2021, 9, 2713. [Google Scholar] [CrossRef]
- Liu, X.K.; Zhuang, J.J.; Li, Y. H∞ Filtering for Markovian Jump Linear Systems with Uncertain Transition Probabilities. Int. J. Control Autom. Syst. 2021, 19, 2500–2510. [Google Scholar] [CrossRef]
- Liu, X.; Teng, Y.; Yan, L. Finite-Time H∞ Static Output Feedback Control for Itô Stochastic Markovian Jump Systems. Mathematics 2020, 8, 1709. [Google Scholar]
- Wang, Y.; Pu, H.; Shi, P.; Ahn, C.K.; Luo, J. Sliding mode control for singularly perturbed Markov jump descriptor systems with nonlinear perturbation. Automatica 2021, 127, 109515. [Google Scholar] [CrossRef]
- Krasovskii, N.; Lidskii, E. Analytical design of controllers in stochastic systems with velocity-limited controlling action. J. Appl. Math. Mech. 1961, 25, 627–643. [Google Scholar] [CrossRef]
- Wonham, W.M. Random differential equations in control theory. Matematika 1973, 17, 129–167. [Google Scholar]
- Blair, W., Jr.; Sworder, D. Feedback control of a class of linear discrete systems with jump parameters and quadratic cost criteria. Int. J. Control 1975, 21, 833–841. [Google Scholar] [CrossRef]
- Rao, R.; Zhong, S. Input-to-state stability and no-inputs stabilization of delayed feedback chaotic financial system involved in open and closed economy. Discret. Contin. Dyn. Syst. S 2021, 14, 1375. [Google Scholar] [CrossRef] [Green Version]
- Sworder, D.; Rogers, R. An LQ-solution to a control problem associated with a solar thermal central receiver. IEEE Trans. Autom. Control 1983, 28, 971–978. [Google Scholar] [CrossRef]
- Dragan, V.; Ivanov, I.G. Sufficient conditions for Nash equilibrium point in the linear quadratic game for Markov jump positive systems. IET Control Theory Appl. 2017, 11, 2658–2667. [Google Scholar] [CrossRef]
- Bucolo, M.; Buscarino, A.; Famoso, C.; Fortuna, L.; Frasca, M. Control of imperfect dynamical systems. Nonlinear Dyn. 2019, 98, 2989–2999. [Google Scholar] [CrossRef]
- Loparo, K.; Abdel-Malek, F. A probabilistic approach to dynamic power system security. IEEE Trans. Circuits Syst. 1990, 37, 787–798. [Google Scholar] [CrossRef]
- Dragan, V.; Aberkane, S. Robust stability of time-varying Markov jump linear systems with respect to a class of structured, stochastic, nonlinear parametric uncertainties. Axioms 2021, 10, 148. [Google Scholar] [CrossRef]
- Cheng, P.; He, S.; Luan, X.; Liu, F. Finite-region asynchronous H∞ control for 2D Markov jump systems. Automatica 2021, 129, 109590. [Google Scholar] [CrossRef]
- Tian, Y.; Yan, H.; Zhang, H.; Cheng, J.; Shen, H. Asynchronous output feedback control of hidden semi-markov jump systems with random mode-dependent delays. IEEE Trans. Autom. Control in press. 2021. [CrossRef]
- Xu, Y.; Wu, Z.G.; Sun, J. Security-Based Passivity Analysis of Markov Jump Systems via Asynchronous Triggering Control. IEEE Trans. Cybern. 2021, in press. [CrossRef]
- Yao, X.; Zhang, L.; Zheng, W.X. Uncertain disturbance rejection and attenuation for semi-Markov jump systems with application to 2-degree-freedom robot arm. IEEE Trans. Circuits Syst. I Regul. Pap. 2021, 68, 3836–3845. [Google Scholar] [CrossRef]
- Wang, Y.; Xia, J.; Shen, H.; Cao, J. HMM-based quantized dissipative control for 2-D Markov jump systems. Nonlinear Anal. Hybrid Syst. 2021, 40, 101018. [Google Scholar] [CrossRef]
- Fang, H.; Zhu, G.; Stojanovic, V.; Nie, R.; He, S.; Luan, X.; Liu, F. Adaptive optimization algorithm for nonlinear Markov jump systems with partial unknown dynamics. Int. J. Robust Nonlinear Control 2021, 31, 2126–2140. [Google Scholar] [CrossRef]
- Wan, H.; Karimi, H.R.; Luan, X.; Liu, F. Self-triggered finite-time H∞ control for Markov jump systems with multiple frequency ranges performance. Inf. Sci. 2021, 581, 694–710. [Google Scholar] [CrossRef]
- Wu, T.; Xiong, L.; Cao, J.; Park, J.H. Hidden Markov model-based asynchronous quantized sampled-data control for fuzzy nonlinear Markov jump systems. Fuzzy Sets Syst. 2021, in press. [CrossRef]
- Hou, T.; Liu, Y.; Deng, F. Stability for discrete-time uncertain systems with infinite Markov jump and time delay. Sci. China Inf. Sci. 2021, 64, 1–11. [Google Scholar] [CrossRef]
- Xie, W.; Nguang, S.K.; Zhu, H.; Zhang, Y.; Shi, K. A novel event-triggered asynchronous H∞ control for TS fuzzy Markov jump systems under hidden Markov switching topologies. Fuzzy Sets Syst. 2021, in press. [CrossRef]
- Lin, W.J.; Han, Q.L.; Zhang, X.M.; Yu, J. Reachable Set Synthesis of Markov Jump Systems with Time-Varying Delays and Mismatched Modes. IEEE Trans. Circuits Syst. II Express Briefs 2021, in press. [CrossRef]
- Ma, C.; Fu, H.; Wu, W. Finite-time filtering of TS fuzzy semi-Markov jump systems with asynchronous mode-dependent delays. J. Frankl. Inst. 2021, in press.
- Liu, L.J.; Zhang, X.; Zhao, X.; Yang, B. Stochastic finite-time stabilization for discrete-time positive Markov jump time delay systems. J. Frankl. Inst. 2021, in press. [CrossRef]
- Liu, L.J.; Xu, N.; Zhao, X. Stability and L1-gain analysis of nonlinear positive Markov jump systems based on a switching transition probability. ISA Trans. 2021, in press. [CrossRef]
- Liu, J.; Ran, G.; Huang, Y.; Han, C.; Yu, Y.; Sun, C. Adaptive Event-Triggered Finite-Time Dissipative Filtering for Interval Type-2 Fuzzy Markov Jump Systems With Asynchronous Modes. IEEE Trans. Cybern. 2021, in press. [CrossRef] [PubMed]
- Ullah, S.; Khan, Q.; Mehmood, A.; Bhatti, A.I. Robust backstepping sliding mode control design for a class of underactuated electro–Mechanical nonlinear systems. J. Electr. Eng. Technol. 2020, 15, 1821–1828. [Google Scholar] [CrossRef]
- Khan, Q. Integral backstepping based robust integral sliding mode control of underactuated nonlinear electromechanical systems. J. Control Eng. Appl. Inform. 2019, 21, 42–50. [Google Scholar]
- Ullah, S.; Mehmood, A.; Ali, K.; Javaid, U.; Hafeez, G.; Ahmad, E. Dynamic Modeling and Stabilization of Surveillance Quadcopter in Space based on Integral Super Twisting Sliding Mode Control Strategy. In Proceedings of the 2021 International Conference on Artificial Intelligence (ICAI), IEEE, Islamabad, Pakistan, 5–7 April 2021; pp. 271–278. [Google Scholar]
- Ullah, S.; Mehmood, A.; Khan, Q.; Rehman, S.; Iqbal, J. Robust integral sliding mode control design for stability enhancement of under-actuated quadcopter. Int. J. Control. Autom. Syst. 2020, 18, 1671–1678. [Google Scholar] [CrossRef]
- Ullah, S.; Khan, Q.; Mehmood, A.; Kirmani, S.A.M.; Mechali, O. Neuro-adaptive fast integral terminal sliding mode control design with variable gain robust exact differentiator for under-actuated quadcopter UAV. ISA Trans. 2021, in press. [Google Scholar] [CrossRef] [PubMed]
- Huang, H.; Feng, G.; Chen, X. Stability and stabilization of Markovian jump systems with time delay via new Lyapunov functionals. IEEE Trans. Circuits Syst. I Regul. Pap. 2012, 59, 2413–2421. [Google Scholar] [CrossRef]
- Xia, Y.; Boukas, E.K.; Shi, P.; Zhang, J. Stability and stabilization of continuous-time singular hybrid systems. Automatica 2009, 45, 1504–1509. [Google Scholar] [CrossRef]
- Gao, H.; Fei, Z.; Lam, J.; Du, B. Further results on exponential estimates of Markovian jump systems with mode-dependent time-varying delays. IEEE Trans. Autom. Control 2010, 56, 223–229. [Google Scholar] [CrossRef] [Green Version]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alattas, K.A.; Mohammadzadeh, A.; Mobayen, S.; Abo-Dief, H.M.; Alanazi, A.K.; Vu, M.T.; Chang, A. Automatic Control for Time Delay Markov Jump Systems under Polytopic Uncertainties. Mathematics 2022, 10, 187. https://doi.org/10.3390/math10020187
Alattas KA, Mohammadzadeh A, Mobayen S, Abo-Dief HM, Alanazi AK, Vu MT, Chang A. Automatic Control for Time Delay Markov Jump Systems under Polytopic Uncertainties. Mathematics. 2022; 10(2):187. https://doi.org/10.3390/math10020187
Chicago/Turabian StyleAlattas, Khalid A., Ardashir Mohammadzadeh, Saleh Mobayen, Hala M. Abo-Dief, Abdullah K. Alanazi, Mai The Vu, and Arthur Chang. 2022. "Automatic Control for Time Delay Markov Jump Systems under Polytopic Uncertainties" Mathematics 10, no. 2: 187. https://doi.org/10.3390/math10020187
APA StyleAlattas, K. A., Mohammadzadeh, A., Mobayen, S., Abo-Dief, H. M., Alanazi, A. K., Vu, M. T., & Chang, A. (2022). Automatic Control for Time Delay Markov Jump Systems under Polytopic Uncertainties. Mathematics, 10(2), 187. https://doi.org/10.3390/math10020187