

Continuous-Control-Set Model Predictive Control for Three-Level DC–DC Converter with Unbalanced Loads in Bipolar Electric Vehicle Charging Stations
 , , , ,
, , , ,  ,
,  ,
,  and
and
Abstract
1. Introduction
- Robustness of the output voltage over sudden load changes.
- Robustness against model parameter uncertainties.
- A fixed switching frequency is achievable with a reduced computational burden.
- The implementation of a CCS-MPC control scheme maintains the bipolar DC bus with better damping performance than an optimal PI controller.
- The steady-state oscillations are reduced compared to an optimal PI controller.
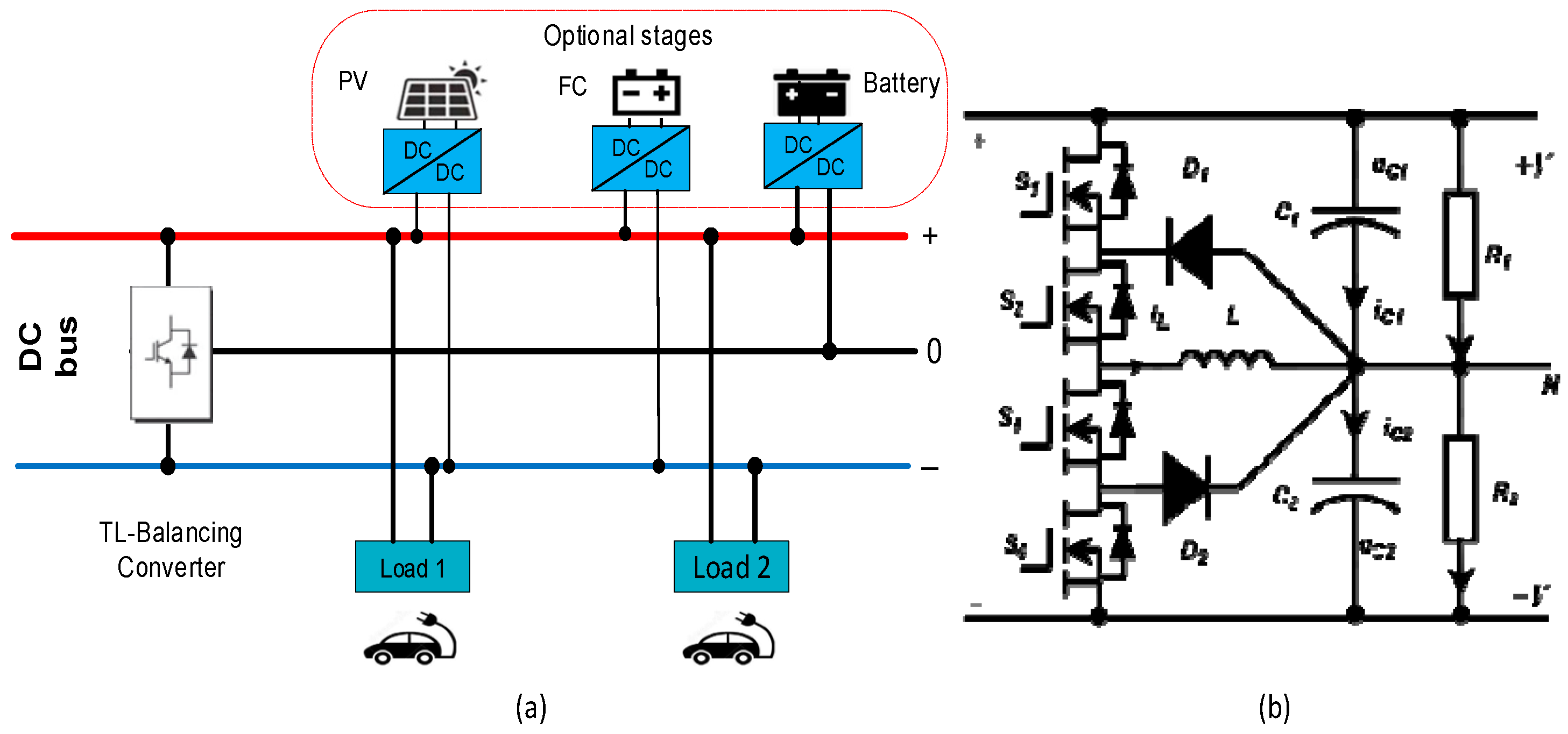
2. Topology of Bipolar DC EV Charging Station
3. Proposed CCS-MPC Strategy for Three-Level Balancing Converter
3.1. System Modeling
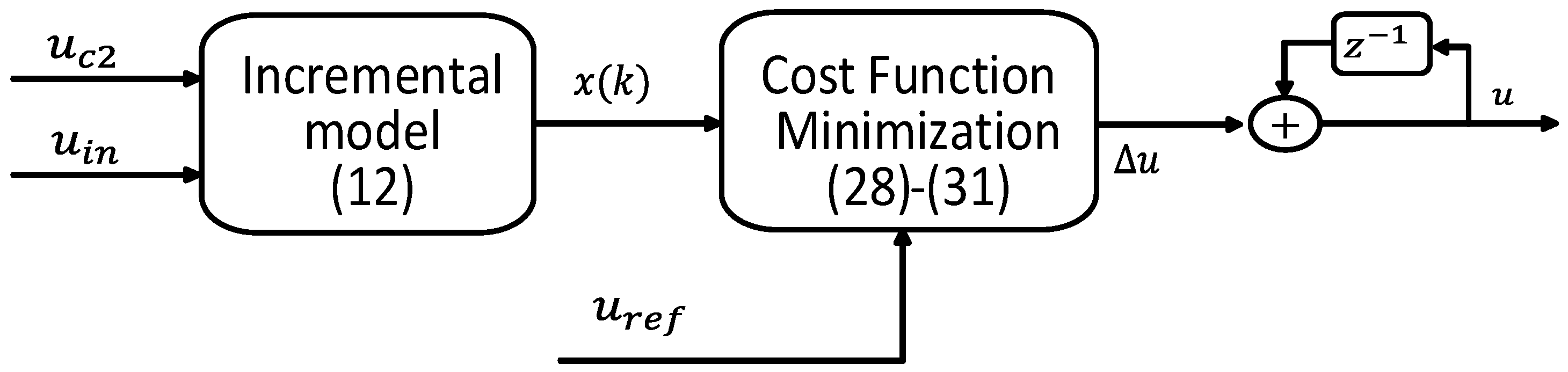
3.2. Discrete Model with an Embedded Integrator
3.3. Model Predictive Control
3.4. Design Guidelines
- (1)
- To achieve the stability of the prediction, horizon and control horizon are designed large enough [22].
- (2)
- To accomplish a better transient response under load fluctuations in the bipolar DC bus, the settling time is assigned a value less than 1 ms.
- (3)
- To achieve a good dynamic response with a low deviation during the transient response, the dominant poles are placed with a damping ratio close to 0.707.
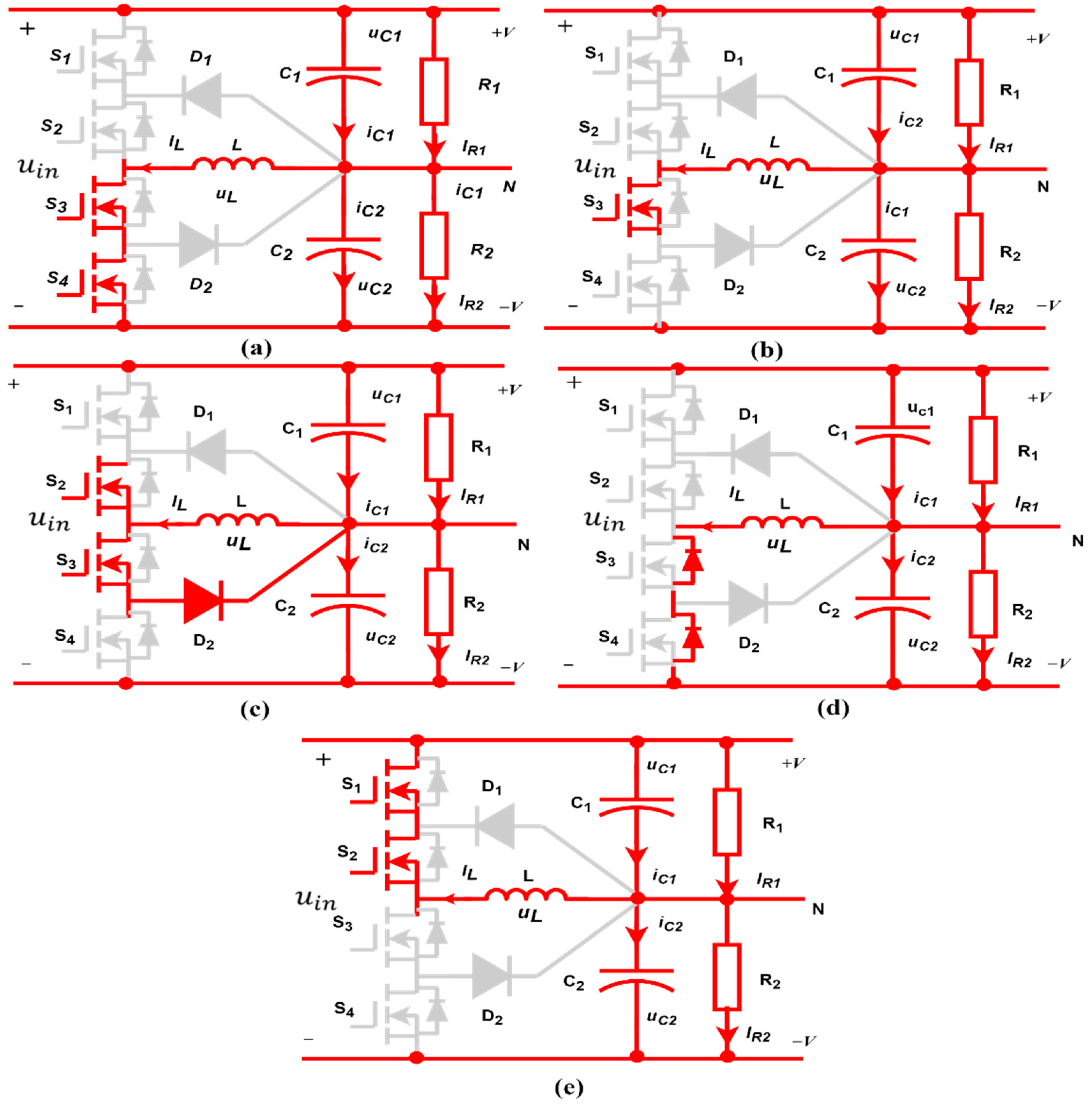
4. Operating Principle of Balancing Converter
4.1. Operation Principle under State I
- (1)
- Mode-I ()
- (2)
- Mode-II ()
- (3)
- Mode-III ()
- (4)
- Mode-IV ()
- (5)
- Mode-V ()
- (6)
- Mode-VI ()
- (7)
- Mode-VII ()
- (8)
- Mode-VIII ()
4.2. Operation Principle under State II
- (1)
- Mode-V ()
- (2)
- Mode-VI ()
- (3)
- Mode-VII ()
- (4)
- Mode-VIII ()
- (5)
- Mode-IX ()
5. Results and Discussion
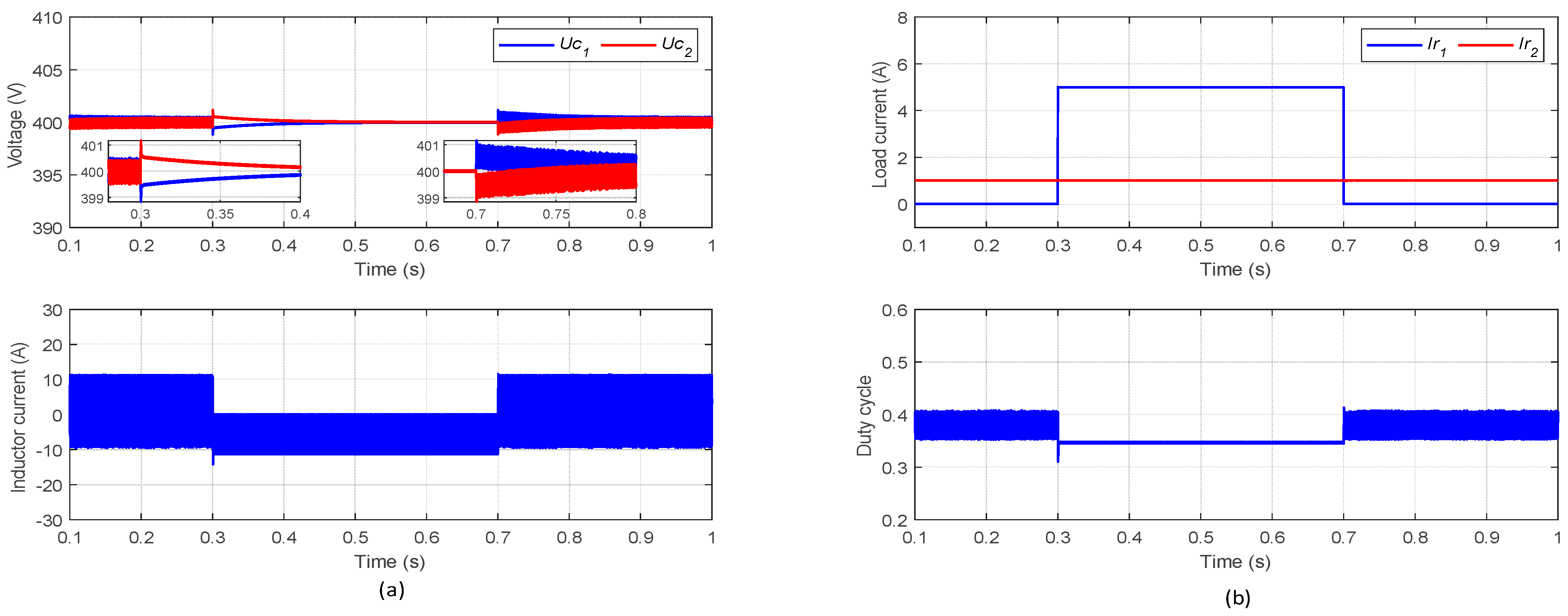
5.1. Steady State Analysis
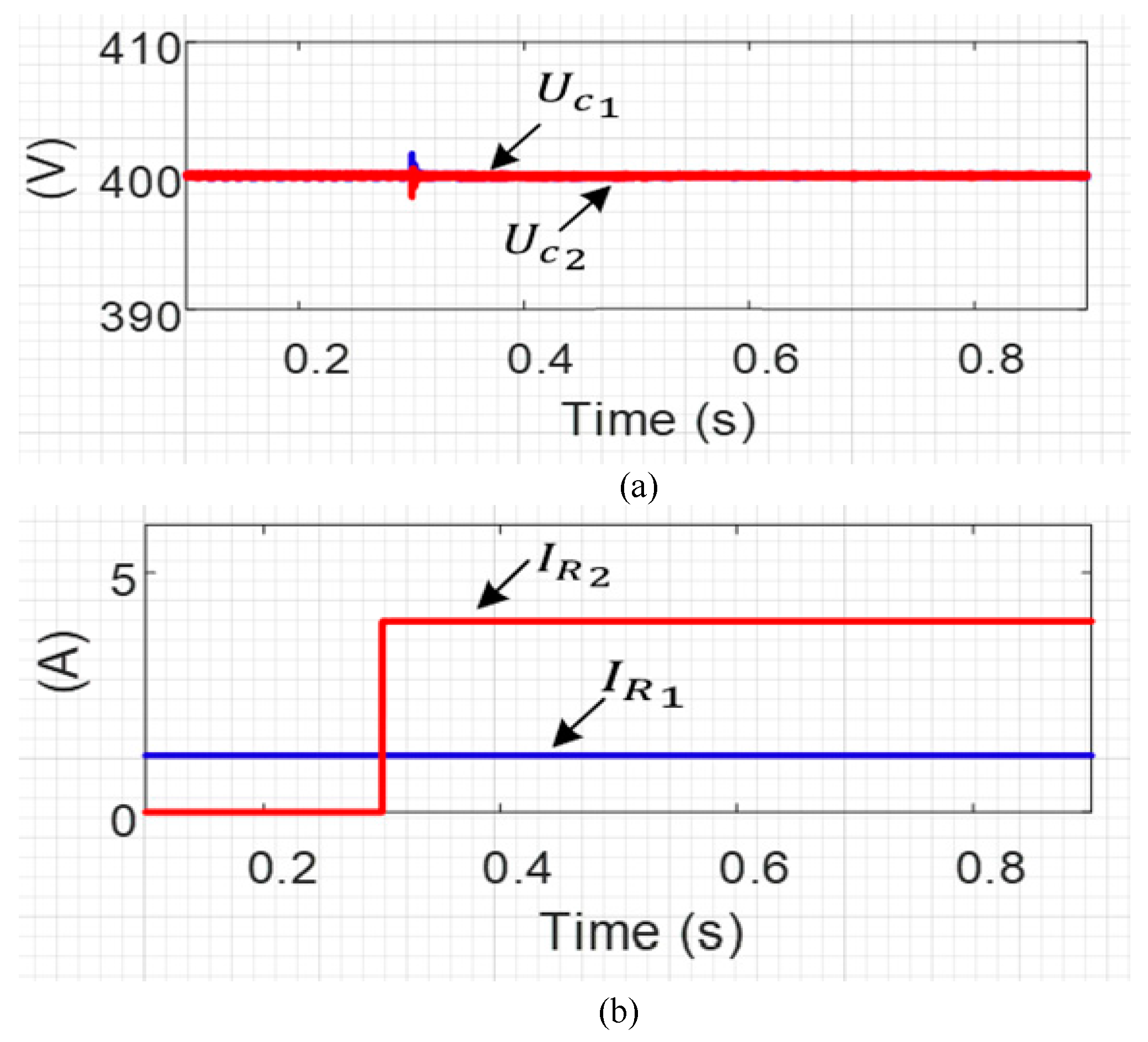
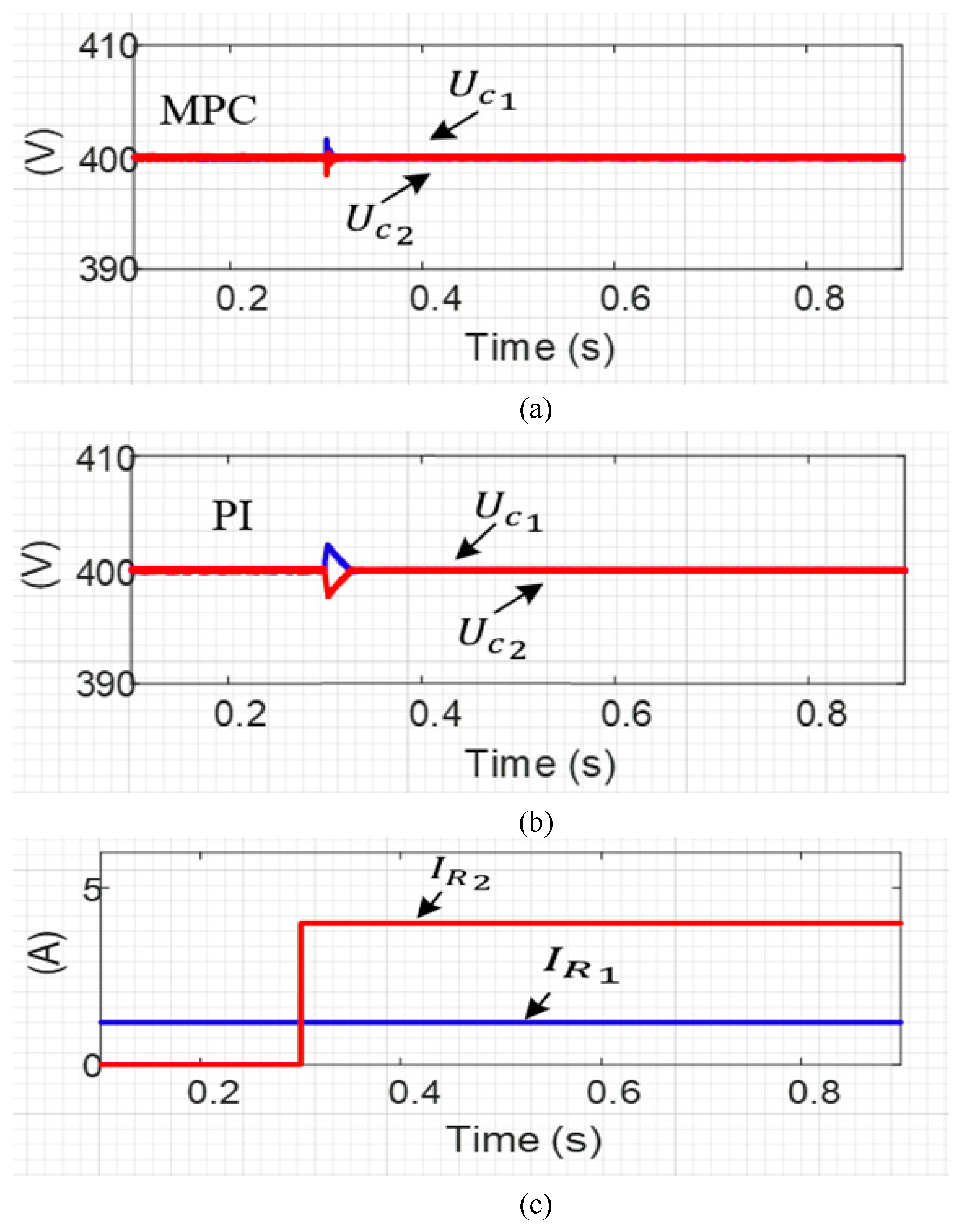
5.2. Performance Comparison of Transient Load Response
5.3. Parameter Robustness Analysis
5.4. Experimental Results
5.5. Comparative Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tan, L.; Zhu, N.; Wu, B. An Integrated Inductor for Eliminating Circulating Current of Parallel Three-Level DC-DC Converter-Based EV Fast Charger. IEEE Trans. Ind. Electron. 2016, 63, 1362–1371. [Google Scholar] [CrossRef]
- Tan, L.; Wu, B.; Rivera, S.; Yaramasu, V. Comprehensive DC Power Balance Management in High-Power Three-Level DC-DC Converter for Electric Vehicle Fast Charging. IEEE Trans. Power Electron. 2016, 31, 89–100. [Google Scholar] [CrossRef]
- Khan, W.; Ahmad, A.; Ahmad, F.; Alam, M.S. A Comprehensive Review of Fast Charging Infrastructure for Electric Vehicles. Smart Sci. 2018, 6, 256–270. [Google Scholar] [CrossRef]
- Rafi, M.A.H.; Bauman, J. A Comprehensive Review of DC Fast-Charging Stations with Energy Storage: Architectures, Power Converters, and Analysis. IEEE Trans. Transp. Electrif. 2021, 7, 345–368. [Google Scholar] [CrossRef]
- Mutarraf, M.U.; Terriche, Y.; Nasir, M.; Guan, Y.; Su, C.L.; Vasquez, J.C.; Guerrero, J.M. A Communication-Less Multimode Control Approach for Adaptive Power Sharing in Ship-Based Seaport Microgrid. IEEE Trans. Transp. Electrif. 2021, 7, 3070–3082. [Google Scholar] [CrossRef]
- Mutarraf, M.U.; Terriche, Y.; Niazi, K.A.K.; Vasquez, J.C.; Guerrero, J.M. Energy storage systems for shipboard microgrids—A review. Energies 2018, 11, 3492. [Google Scholar] [CrossRef]
- Gwon, G.H.; Kim, C.H.; Oh, Y.S.; Noh, C.H.; Jung, T.H.; Han, J. Mitigation of voltage unbalance by using static load transfer switch in bipolar low voltage DC distribution system. Int. J. Electr. Power Energy Syst. 2017, 90, 158–167. [Google Scholar] [CrossRef]
- Liao, J.; You, X.; Liu, H.; Huang, Y. Voltage stability improvement of a bipolar DC system connected with constant power loads. Electr. Power Syst. Res. 2021, 201, 107508. [Google Scholar] [CrossRef]
- Rivera, S.; Wu, B. Electric Vehicle Charging Station With an Energy Storage Stage for Split-DC Bus Voltage Balancing. IEEE Trans. Power Electron. 2017, 32, 2376–2386. [Google Scholar] [CrossRef]
- Verma, A.K.; Subramanian, C.; Jarial, R.K.; Roncero-Sanchez, P. An Enhanced Discrete-Time Oscillator-Based PLL-Less Estimation of Single-Phase Grid Voltage Parameters. IEEE Trans. Ind. Electron. 2022, 69, 3977–3987. [Google Scholar] [CrossRef]
- Tan, L.; Wu, B.; Yaramasu, V.; Rivera, S.; Guo, X. Effective Voltage Balance Control for Bipolar-DC-Bus-Fed EV Charging Station with Three-Level DC-DC Fast Charger. IEEE Trans. Ind. Electron. 2016, 63, 4031–4041. [Google Scholar] [CrossRef]
- Tian, Q.; Zhou, G.; Leng, M.; Xu, G.; Fan, X. A Nonisolated Symmetric Bipolar Output Four-Port Converter Interfacing PV-Battery System. IEEE Trans. Power Electron. 2020, 35, 11731–11744. [Google Scholar] [CrossRef]
- Zhang, X.; Gong, C.; Yao, Z. Three-level DC converter for balancing DC 800-V voltage. IEEE Trans. Power Electron. 2015, 30, 3499–3507. [Google Scholar] [CrossRef]
- Zhang, X.; Gong, C. Dual-buck half-bridge voltage balancer. IEEE Trans. Ind. Electron. 2013, 60, 3157–3164. [Google Scholar] [CrossRef]
- Han, B.M. A half-bridge voltage balancer with new controller for bipolar DC distribution systems. Energies 2016, 9, 182. [Google Scholar] [CrossRef]
- Zhang, X.; Zhu, H.; Song, Y.; Li, R. Three-level dual-buck voltage balancer with active output voltagesbalancing. IET Power Electron. 2019, 12, 2987–2995. [Google Scholar] [CrossRef]
- Dc, B. A Bi-Directional Dual-Input Dual-Output Converter for Voltage Balancer in Bipolar DC Microgrid. Energies 2022, 15, 5043. [Google Scholar]
- Liu, J.; Vazquez, S.; Wu, L.; Marquez, A.; Gao, H.; Franquelo, L.G. Extended State Observer-Based Sliding-Mode Control for Three-Phase Power Converters. IEEE Trans. Ind. Electron. 2017, 64, 22–31. [Google Scholar] [CrossRef]
- Wang, X.; Wu, M.; Ouyang, L.; Tang, Q. The application of GA-PID control algorithm to DC-DC converter. In Proceedings of the 29th Chinese Control Conference, Beijing, China, 29–31 July 2010; pp. 3492–3496. [Google Scholar]
- Al-Tameemi, Z.H.A.; Lie, T.T.; Foo, G.; Blaabjerg, F. Optimal Coordinated Control of DC Microgrid Based on Hybrid PSO–GWO Algorithm. Electricity 2022, 3, 346–364. [Google Scholar] [CrossRef]
- Yang, G.; Yao, J.; Ullah, N. Neuroadaptive control of saturated nonlinear systems with disturbance compensation. ISA Trans. 2022, 122, 49–62. [Google Scholar] [CrossRef]
- Rossiter, J.A. Model-Based Predictive Control: A Practical Approach; CRC Press: Boca Raton, FL, USA, 2017; pp. 1–318. [Google Scholar]
- Guzman, R.; de Vicuna, L.G.; Camacho, A.; Miret, J.; Rey, J.M. Receding-Horizon Model-Predictive Control for a Three-Phase VSI with an LCL Filter. IEEE Trans. Ind. Electron. 2019, 66, 6671–6680. [Google Scholar] [CrossRef]
- Alfaro, C.; Guzman, R.; de Vicuna, L.G.; Miret, J.; Castilla, M. Dual-Loop Continuous Control Set Model-Predictive Control for a Three-Phase Unity Power Factor Rectifier. IEEE Trans. Power Electron. 2022, 37, 1447–1460. [Google Scholar]
- Zhou, D.; Jiang, C.; Quan, Z.; Li, Y. Vector Shifted Model Predictive Power Control of Three-Level Neutral-Point-Clamped Rectifiers. IEEE Trans. Ind. Electron. 2020, 67, 7157–7166. [Google Scholar] [CrossRef]
- Vargas, R.; Member, S.; Cortés, P.; Ammann, U.; Rodríguez, J.; Member, S.; Pontt, J. Predictive Control of a Three-Phase. IEEE Trans. Ind. Electron. 2007, 54, 2697–2705. [Google Scholar] [CrossRef]
- Liu, X.; Qiu, L.; Fang, Y.; Ma, J.; Wu, W.; Peng, Z.; Wang, D. Lyapunov-based finite control-set model predictive control for nested neutral point-clamped converters without weighting factors. Int. J. Electr. Power Energy Syst. 2020, 121, 106071. [Google Scholar] [CrossRef]
- Geyer, T.; Mastellone, S. Model predictive direct torque control of a five-level ANPC converter drive system. IEEE Trans. Ind. Appl. 2012, 48, 1565–1575. [Google Scholar] [CrossRef]
- Cortes, P.; Wilson, A.; Kouro, S.; Rodriguez, J.; Abu-Rub, H. Model predictive control of multilevel cascaded H-bridge inverters. IEEE Trans. Ind. Electron. 2010, 57, 2691–2699. [Google Scholar] [CrossRef]
- Dekka, A.; Wu, B.; Yaramasu, V.; Fuentes, R.L.; Zargari, N.R. Model Predictive Control of High-Power Modular Multilevel Converters—An Overview. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 7, 168–183. [Google Scholar] [CrossRef]
- Yang, Y.; Wen, H.; Fan, M.; He, L.; Xie, M.; Chen, R.; Norambuena, M.; Rodriguez, J. Multiple-Voltage-Vector Model Predictive Control with Reduced Complexity for Multilevel Inverters. IEEE Trans. Transp. Electrif. 2020, 6, 105–117. [Google Scholar] [CrossRef]
- Lezana, P.; Aguilera, R.; Quevedo, D.E. Model predictive control of an asymmetric flying capacitor converter. IEEE Trans. Ind. Electron. 2009, 56, 1839–1846. [Google Scholar] [CrossRef]
- Alfaroaragon, C.A.; Guzman, R.; de Vicuna, L.G.; Miret, J.; Castilla, M. Constrained Predictive Control Based on a Large-Signal Model for a Three-Phase Inverter Connected to a Microgrid. IEEE Trans. Ind. Electron. 2021, 69, 6497–6507. [Google Scholar] [CrossRef]
- Preindl, M.; Bolognani, S. Comparison of direct and PWM model predictive control for power electronic and drive systems. In Proceedings of the 2013 Twenty-Eighth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Long Beach, CA, USA, 17–21 March 2013; pp. 2526–2533. [Google Scholar]
- Cavanini, L.; Cimini, G.; Ippoliti, G.; Bemporad, A. Model predictive control for pre-compensated voltage mode controlled DC-DC converters. IET Control Theory Appl. 2017, 11, 2514–2520. [Google Scholar] [CrossRef]
- Rajesh, J.; Nisha, K.S.; Bonala, A.K.; Sandepudi, S.R. Predictive Control of Three level Boost Converter Interfaced SPV System for Bi-polar DC Micro grid. In Proceedings of the 2019 IEEE International Conference on Electrical, Computer and Communication Technologies (ICECCT), Coimbatore, India, 20–22 February 2019; pp. 9–14. [Google Scholar]
- Nisha, K.S.; Gaonkar, D.N. Model predictive control of three level buck/boost converter for bipolar DC microgrid applications. In Proceedings of the 2019 IEEE 16th India Council International Conference (INDICON), Rajkot, India, 13–15 December 2019; pp. 2019–2022. [Google Scholar]
- Du, Y.; Zhou, X.; Bai, S.; Lukic, S.; Huang, A. Review of non-isolated bi-directional DC-DC converters for plug-in hybrid electric vehicle charge station application at municipal parking decks. In Proceedings of the 2010 Twenty-Fifth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Palm Springs, CA, USA, 21–25 February 2010; pp. 1145–1151. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Symbol | Value |
|---|---|---|
| Capacitors | ||
| Inductor | ||
| Switches | SPW47N60C3 | |
| Diodes | DESI60-06A | |
| Freewheeling time | ||
| DC bias voltage | ||
| Input voltage | ||
| Output voltage | About | |
| Amplitude of carrying wave | ||
| Switching frequency | ||
| Dead time | ||
| Control horizon | ||
| Prediction horizon | ||
| Control effort | ||
| Proportional gain | 0.0557 | |
| Integral gain | 0.7508 |
| MPC | (V) | (A) | (A) | ||
| 400.2 | 399.8 | 1.2 | 8.5 | 0.2 | |
| 400.2 | 400.1 | 2.5 | 5 | 0.1 | |
| 399.82 | 400.23 | 7.5 | 1.3 | −0.41 | |
| 400 | 400.2 | 5 | 3 | −0.2 | |
| PI | 396.17 | 401.3 | 1.2 | 8.5 | −5.13 |
| 397.41 | 400.8 | 2.5 | 5 | −3.39 | |
| 398.1 | 402.7 | 7.5 | 1.3 | −4.6 | |
| 396.5 | 400.13 | 5 | 3 | −3.63 | |
| Computational Complexity | |||||
| Memory states | Addition operators | Division operators | Subtraction operators | Multiplication operators | |
| MPC | 3 | 1 | 0 | 5 | 3 |
| PI | 1 | 2 | 0 | 1 | 3 |
| Performance Indices | |||||
| Settling time | Load disturbance rejection | Overshoots in DC link voltage | Steady-state error | Mismatches in Parameter robustness | |
| MPC | 1 ms | Good | 1.5 V | 0.5 V | Good |
| PI | 100 ms | Good | 2 V | 5 V | Poor |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sadiq, M.; Aragon, C.A.; Terriche, Y.; Ali, S.W.; Su, C.-L.; Buzna, Ľ.; Elsisi, M.; Lee, C.-H. Continuous-Control-Set Model Predictive Control for Three-Level DC–DC Converter with Unbalanced Loads in Bipolar Electric Vehicle Charging Stations. Mathematics 2022, 10, 3444. https://doi.org/10.3390/math10193444
Sadiq M, Aragon CA, Terriche Y, Ali SW, Su C-L, Buzna Ľ, Elsisi M, Lee C-H. Continuous-Control-Set Model Predictive Control for Three-Level DC–DC Converter with Unbalanced Loads in Bipolar Electric Vehicle Charging Stations. Mathematics. 2022; 10(19):3444. https://doi.org/10.3390/math10193444
Chicago/Turabian StyleSadiq, Muhammad, Carlos Alfaro Aragon, Yacine Terriche, Syed Wajahat Ali, Chun-Lien Su, Ľuboš Buzna, Mahmoud Elsisi, and Chung-Hong Lee. 2022. "Continuous-Control-Set Model Predictive Control for Three-Level DC–DC Converter with Unbalanced Loads in Bipolar Electric Vehicle Charging Stations" Mathematics 10, no. 19: 3444. https://doi.org/10.3390/math10193444
APA StyleSadiq, M., Aragon, C. A., Terriche, Y., Ali, S. W., Su, C.-L., Buzna, Ľ., Elsisi, M., & Lee, C.-H. (2022). Continuous-Control-Set Model Predictive Control for Three-Level DC–DC Converter with Unbalanced Loads in Bipolar Electric Vehicle Charging Stations. Mathematics, 10(19), 3444. https://doi.org/10.3390/math10193444