
Digital Twin Formation Method for Distributed Generation Plants of Cyber–Physical Power Supply Systems †

 ,
,  ,
, 
Abstract
:1. Introduction
- There is no accurate information about the differential equations describing the behavior of the object and therefore simplification methods are used;
- The finite element method requires knowledge of the initial and boundary conditions, information which may not be available;
- It is difficult to adapt the model built on the basis of the finite element method when the operating parameters and conditions of a physical object change.
- ▪ Generalized error clustering algorithm;
- ▪ Generalized Schwartz method;
- ▪ Method of training a set of expert models, etc.
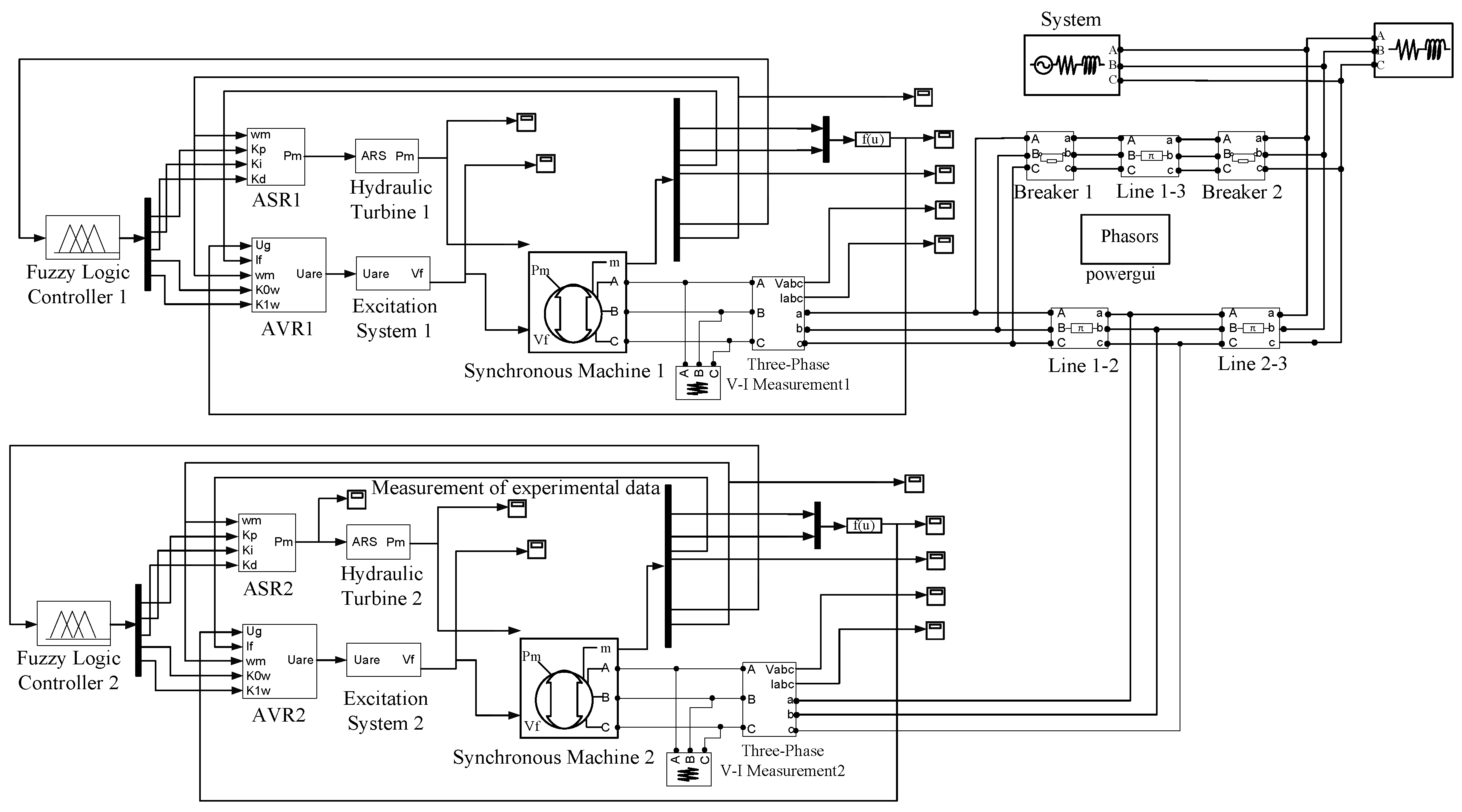
2. Description of the DG Plant Working in Cyber–Physical PSS
3. Method for DG Plant Digital Twin Building
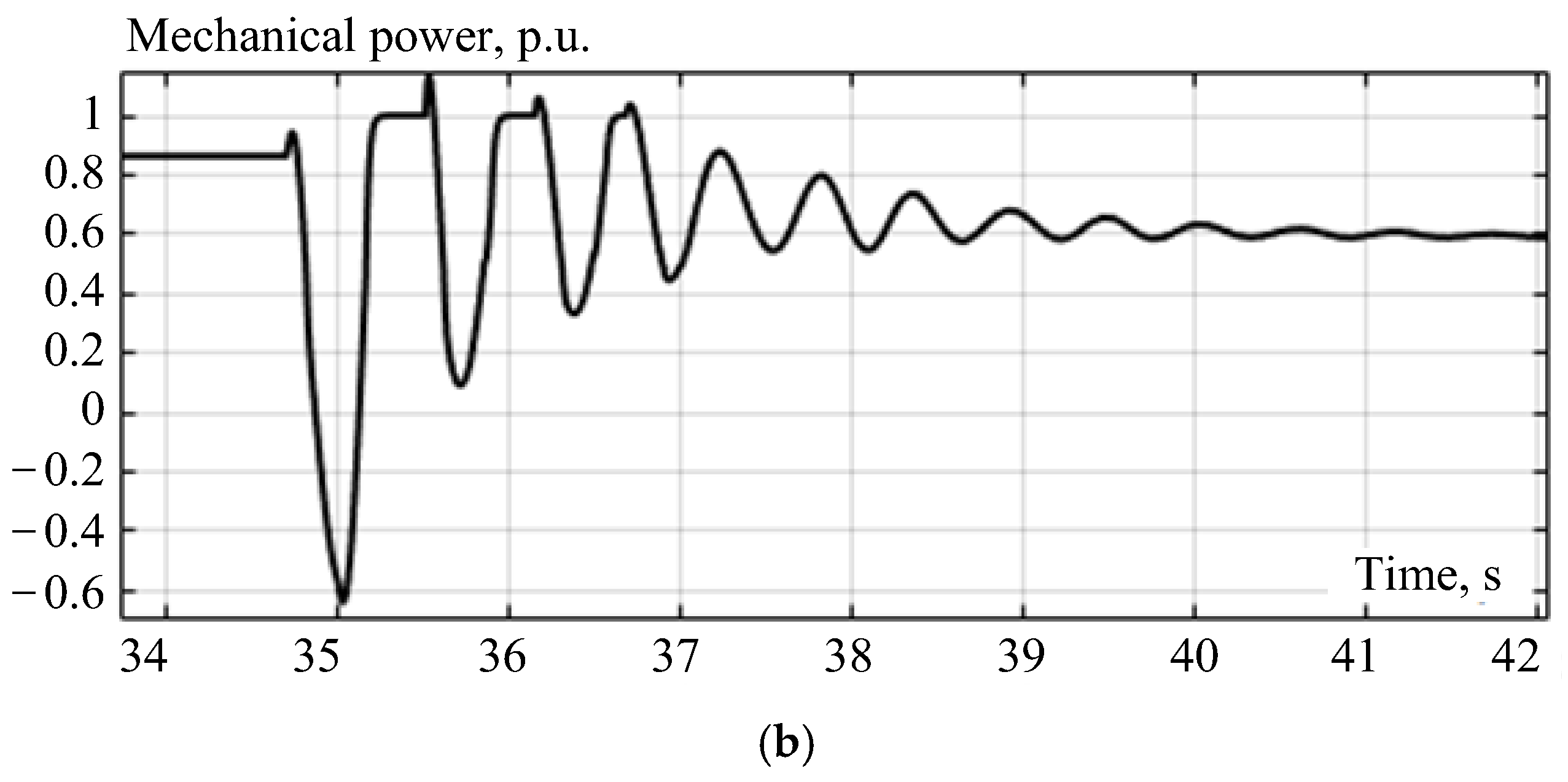
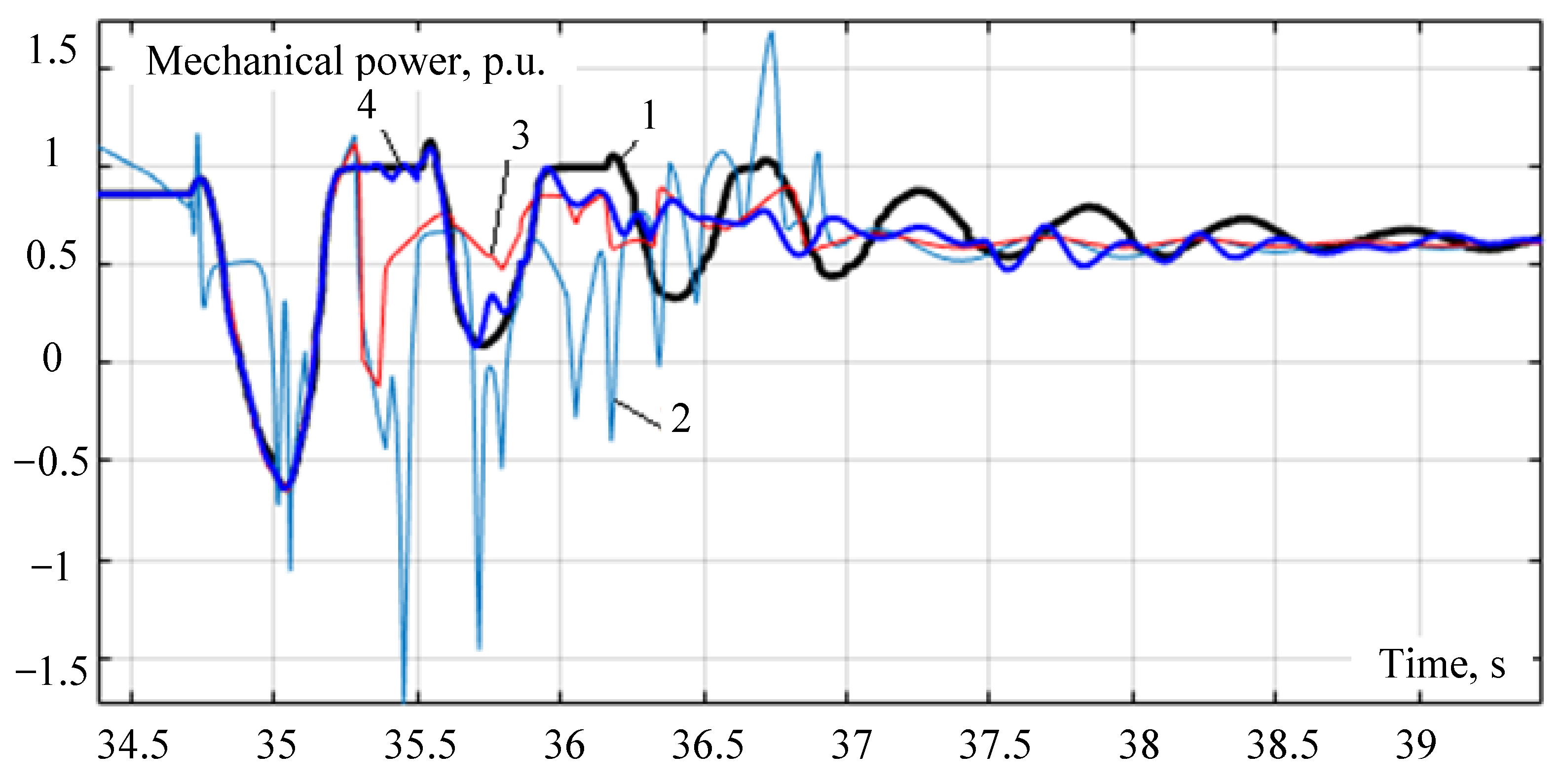
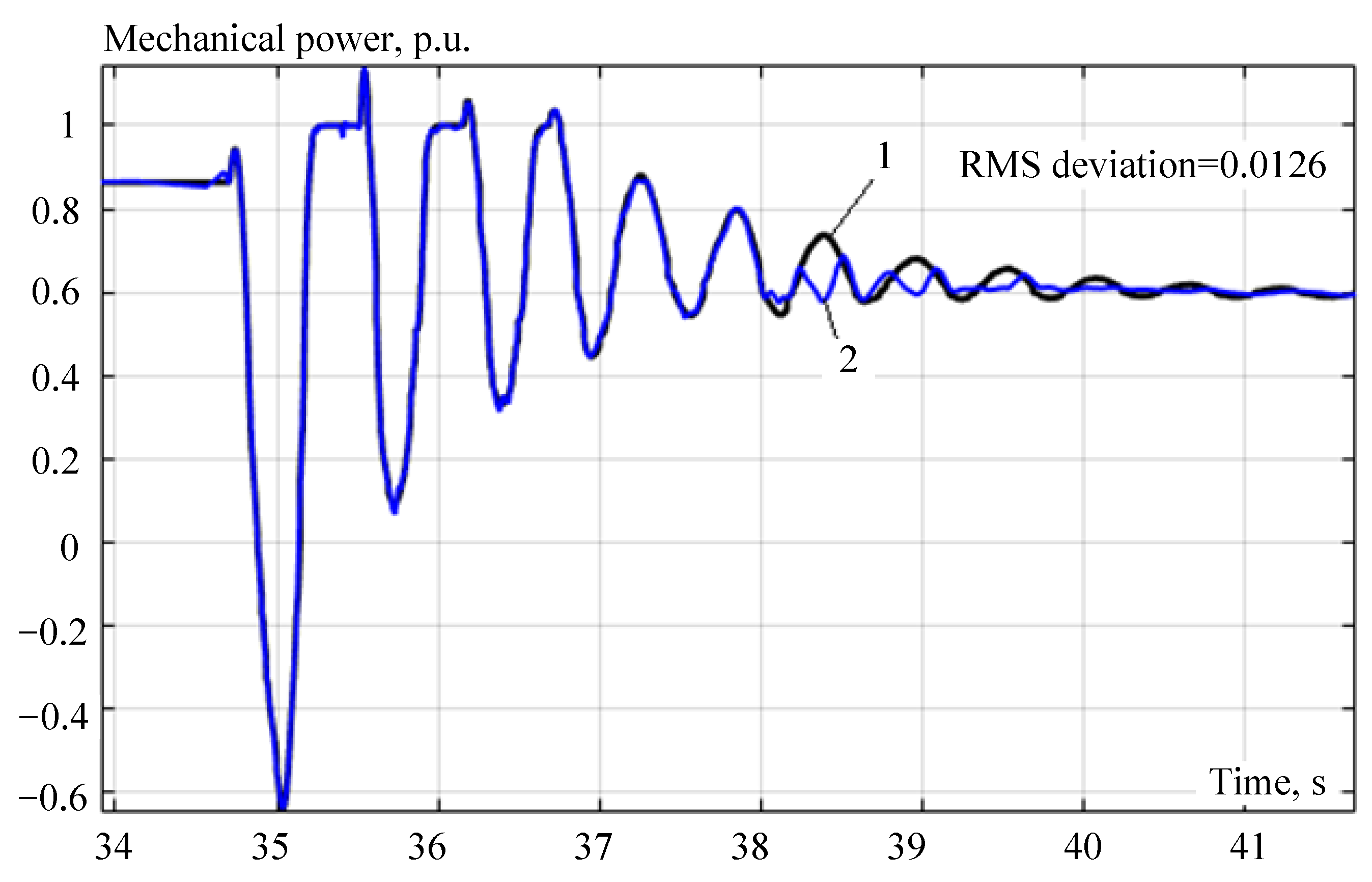
4. Simulation Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, J.; Huang, A.Q.; Sung, W.; Liu, Y.; Baliga, B.J. Smart Grid Technologies. IEEE Ind. Electron. Mag. 2009, 3, 16–23. [Google Scholar] [CrossRef]
- Buchholz, B.M.; Styczynski, Z.A. Smart Grids—Fundamentals and Technologies in Electricity Networks; Springer: Berlin/Heidelberg, Germany, 2014; 396p. [Google Scholar]
- Mohsen, F.N.; Amin, M.S.; Hashim, H. Application of smart power grid in developing countries. In Proceedings of the IEEE 7th International Power Engineering and Optimization Conference (PEOCO), Langkawi, Malaysia, 3–4 June 2013. [Google Scholar] [CrossRef]
- Ellabban, O.; Abu-Rub, H.; Blaabjerg, F. Renewable energy resources: Current status, future prospects and their enabling technology. Renew. Sustain. Energy Rev. 2014, 39, 748–764. [Google Scholar] [CrossRef]
- Liere-Netheler, I.; Schuldt, F.; Maydell, K.; Agert, C. Simulation of incidental distributed generation curtailment to maximize the integration of renewable energy generation in power systems. Energies 2020, 13, 4173. [Google Scholar] [CrossRef]
- Lombardi, P.; Styczynski, Z.A.; Sokolnikova, T.; Suslov, K. Use of energy storage in Isolated Micro Grids. In Proceedings of the 2014 Power Systems Computation Conference (PSCC), Wrocław, Poland, 18–22 August 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Bulatov, Y.N.; Kryukov, A.V.; van Huan, N. Reduction in microgrids voltage dips based on power accumulators and controlled distributed generation plants. In Proceedings of the International Ural Conference on Electrical Power Engineering (UralCon), Chelyabinsk, Russia, 1–3 October 2019. pp. 24–28. [CrossRef]
- Park, K.J.; Zheng, R.; Liu, X. Cyber-physical Systems: Milestones and Research Challenges. Comput. Commun. 2012, 36, 1–7. [Google Scholar] [CrossRef]
- Khaitan, S.K.; McCalley, J.D. Design techniques and applications of cyberphysical systems: A survey. IEEE Syst. J. 2014, 9, 350–365. [Google Scholar] [CrossRef]
- Khaitan, S.K.; McCalley, J.D. Cyber physical system approach for design of power grids. In Proceedings of the IEEE Power & Energy Society General Meeting, Vancouver, BC, Canada, 21–25 July 2013. [Google Scholar]
- Tomin, N.; Kurbatsky, V.; Borisov, V.; Musalev, S. Development of Digital Twin for Load Center on the Example of Distribution Network of an Urban District. E3S Web Conf. 2020, 209, 02029. [Google Scholar] [CrossRef]
- Bulatov, Y.N.; Kryukov, A.V.; Korotkova, K.E. Digital Twin of the Distributed Generation Plant. IOP Conf. Ser. Mater. Sci. Eng. 2020, 976, 012024. [Google Scholar] [CrossRef]
- Moussa, C.; Ai-Haddad, K.; Kedjar, B.; Merkhouf, A. Insights into Digital Twin Based on Finite Element Simulation of a Large Hydro Generator. In Proceedings of the IECON 2018—44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 553–558. [Google Scholar]
- Jain, P.; Poon, J.; Singh, J.P.; Spanos, C.; Sanders, S.; Panda, S.K. A Digital Twin Approach for Fault Diagnosis in Distributed Photovoltaic System. IEEE Trans. Power Electron. 2020, 35, 940–956. [Google Scholar] [CrossRef]
- Grieves, M.; Vickers, J. Digital Twin: Mitigating Unpredictable, Undesirable Emergent Behavior in Complex Systems. In Transdisciplinary Perspectives on Complex Systems; Kahlen, F.J., Flumerfelt, S., Alves, A., Eds.; Springer: Cham, Switzerland, 2017. [Google Scholar] [CrossRef]
- Uhlemann, T.H.-J.; Schock, C.; Lehmann, C.; Freiberger, S.; Steinhilper, R. The Digital Twin: Demonstrating the Potential of Real Time Data Acquisition in Production Systems. Procedia Manuf. 2017, 9, 113–120. [Google Scholar] [CrossRef]
- Boschert, S.; Rosen, R. Digital Twin—The Simulation Aspect. In Mechatronic Futures; Hehenberger, P., Bradley, D., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 59–74. [Google Scholar] [CrossRef]
- Vasilyev, A.N.; Tarkhov, D.A.; Malykhina, G.F. Methods of creating digital twins based on neural network modeling. Mod. Inf. Technol. IT Educ. 2018, 14, 521–532. [Google Scholar] [CrossRef]
- Ooi, E.; Song, C.; Natarajan, S. A scaled boundary finite element formulation with bubble functions for elasto-static analyses of functionally graded materials. Comput. Mech. 2017, 60, 943–967. [Google Scholar] [CrossRef]
- Zienkiewicz, O.C.; Taylor, R.L.; Zhu, J.Z. The Finite Element Method: Its Basis and Fundamentals; Elsevier: Amsterdam, The Netherlands; Butterworth-Heinemann: Oxford, UK, 2005. [Google Scholar]
- Antonov, V.; Tarkhov, D.; Vasilyev, A. Unified approach to constructing the neural network models of real objects. Part 1. Math. Methods Appl. Sci. 2018, 41, 9244–9251. [Google Scholar] [CrossRef]
- Vasilyev, A.; Tarkhov, D. Mathematical Models of Complex Systems on the Basis of Artificial Neural Networks. Nonlinear Phenom. Complex Syst. 2014, 17, 327–335. [Google Scholar]
- Jain, A.K.; Mao, J.; Mohiuddin, K. Artificial neural networks: A tutorial. Computer 1996, 29, 31–44. [Google Scholar] [CrossRef]
- Din, G.M.U.; Marnerides, A.K. Short term power load forecasting using Deep Neural Networks. In Proceedings of the 2017 International Conference on Computing, Networking and Communications (ICNC), Santa Clara, CA, USA, 26–29 January 2017; pp. 594–598. [Google Scholar] [CrossRef]
- Han, L.; Peng, Y.; Li, Y.; Yong, B.; Zhou, Q.; Shu, L. Enhanced Deep Networks for Short-Term and Medium-Term Load Forecasting. IEEE Access 2019, 7, 4045–4055. [Google Scholar] [CrossRef]
- Almeida, C.M.; Gleriani, J.; Castejon, E.F.; Soares-Filho, B.S. Using neural networks and cellular automata for modelling intra-urban land-use dynamics. Int. J. Geogr. Inf. Sci. 2008, 22, 943–963. [Google Scholar] [CrossRef]
- Kim, B.S.; Kim, T.G. Modeling and Simulation Using Artificial Neural Network-Embedded Cellular Automata. IEEE Access 2020, 8, 24056–24061. [Google Scholar] [CrossRef]
- Janakiraman, V.M.; Nguyen, X.; Assanis, D. Nonlinear identification of a gasoline HCCI engine using neural networks coupled with principal component analysis. Appl. Soft Comput. 2013, 13, 2375–2389. [Google Scholar] [CrossRef]
- Narendra, K.; Parthasarathy, K. Identification and control of dynamical systems using neural networks. IEEE Trans. Neural Networks 1990, 1, 4–27. [Google Scholar] [CrossRef]
- He, P.; Jagannathan, S. Reinforcement learning-based output feedback control of nonlinear systems with input constraints. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2005, 35, 150–154. [Google Scholar] [CrossRef]
- Reyes-García, C.A.; Torres-García, A.A. Chapter 8—Fuzzy logic and fuzzy systems. In Biosignal Processing and Classification Using Computational Learning and Intelligence; Torres-García, A.A., Reyes-García, C.A., Villaseñor-Pineda, L., Mendoza-Montoya, O., Eds.; Academic Press: Cambridge, MA, USA, 2022; pp. 153–176. [Google Scholar] [CrossRef]
- Klement, E.P.; Koczy, L.T.; Moser, B. Are fuzzy systems universal approximators? Int. J. Gen. Syst. 1999, 28, 259–282. [Google Scholar] [CrossRef]
- Tam, P.; Wu, A. A fuzzy neural network based on fuzzy hierarchy error approach. IEEE Trans. Fuzzy Syst. 2000, 8, 808–816. [Google Scholar] [CrossRef]
- Nabavi-Pelesaraei, A.; Rafiee, S.; Hosseini-Fashami, F.; Chau, K.-W. Chapter 11—Artificial neural networks and adaptive neuro-fuzzy inference system in energy modeling of agricultural products. In Predictive Modelling for Energy Management and Power Systems Engineering; Deo, R., Samui, P., Roy, S.S., Eds.; Elsevier: Amsterdam, The Netherlands, 2021; pp. 299–334. [Google Scholar] [CrossRef]
- Hooshmand, R.A.; Parastegari, M.; Forghani, Z. Adaptive neuro-fuzzy inference system approach for simultaneous diagnosis of the type and location of faults in power transformers. IEEE Electr. Insul. Mag. 2012, 28, 32–42. [Google Scholar] [CrossRef]
- Chen, C.L.P.; Wang, J.; Wang, C.-H.; Chen, L. A New Learning Algorithm for a Fully Connected Neuro-Fuzzy Inference System. IEEE Trans. Neural Netw. Learn. Syst. 2014, 25, 1741–1757. [Google Scholar] [CrossRef] [PubMed]
- Lazovskaya, T.; Tarkhov, D. Multilayer neural network models, based on grid methods. IOP Conf. Ser. Mater. Sci. Eng. 2016, 158, 012061. [Google Scholar] [CrossRef]
- Zulkarnay, I.U.; Kaverzneva, T.T.; Tarkhov, D.A.; Tereshin, V.A.; Vinokhodov, T.V.; Kapitsin, D.R. A Two-layer Semi-Empirical Model of Nonlinear Bending of the Cantilevered Beam. J. Phys. Conf. Ser. 2018, 1044, 012005. [Google Scholar] [CrossRef]
- Krishnamraju, P.; Buckley, J.; Reilly, K.; Hayashi, Y. Genetic learning algorithms for fuzzy neural nets. In Proceedings of the 1994 IEEE 3rd International Fuzzy Systems Conference, Orlando, FL, USA, 26–29 June 1994; Volume 3, pp. 1969–1974. [Google Scholar] [CrossRef]
- Wang, S.; Zhang, X.; Zheng, X.; Yuan, B. A Genetic-Algorithm-Based Two-Stage Learning Scheme for Neural Networks. In Proceedings of the 2010 International Conference on e-Education, e-Business, e-Management and e-Learning, Sanya, China, 22–24 January 2010; pp. 391–394. [Google Scholar] [CrossRef]
- Jaensch, F.; Csiszar, A.; Scheifele, C.; Verl, A. Digital Twins of Manufacturing Systems as a Base for Machine Learning. In Proceedings of the 25th International Conference on Mechatronics and Machine Vision in Practice (M2VIP), Stuttgart, Germany, 20–22 November 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Kapteyn, M.G.; Karen, E.W. From Physics-Based Models to Predictive Digital Twins via Interpretable Machine Learning. arXiv 2020, arXiv:2004.11356. [Google Scholar]
- Zhang, L.; Zhou, L.; Horn, B.K.P. Building a right digital twin with model engineering. J. Manuf. Syst. 2021, 59, 151–164. [Google Scholar] [CrossRef]
- Chang, D. Applications of the extent analysis method on fuzzy ahp. Eur. J. Oper. Res. 1996, 95, 649–655. [Google Scholar] [CrossRef]
- Pearl, J.; Russell, S. Bayesian Networks. In Handbook of Brain Theory and Neural Networks; Arbib, M.A., Ed.; MIT Press: Cambridge, MA, USA, 2003; pp. 157–160. [Google Scholar]
- Zhang, G.; Wang, X. Digital Twin Modeling for Photovoltaic Panels Based on Hybrid Neural Network. In Proceedings of the 2021 IEEE 1st International Conference on Digital Twins and Parallel Intelligence (DTPI), Beijing, China, 15 July–15 August 2021; pp. 90–93. [Google Scholar] [CrossRef]
- Jia, W.K.; Zhao, D.; Ding, L. An optimized RBF neural network algorithm based on partial least squares and genetic algorithm for classification of small sample. Appl. Soft Comput. 2016, 48, 373–384. [Google Scholar] [CrossRef]
- Wen, C.B.; Ma, W.B.; Liu, P.L. Research on Structure Optimization of RBF neural network based on improved genetic algorithm. Comput. Eng. Sci. 2019, 43, 917–923. [Google Scholar]
- Zedak, C.; Lekbich, A.; Belfqih, A.; Boukherouaa, J.; Haidi, T.; Mariami, F. A proposed secure remote data acquisition architecture of photovoltaic systems based on the Internet of Things. In Proceedings of the 2018 6th International Conference on Multimedia Computing and Systems (ICMCS), Rabat, Morocco, 10–12 May 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Massel, L.; Massel, A. Ontologies as a Basis for Constructing Digital Twins in Energy. In Proceedings of the 2021 International Symposium on Knowledge, Ontology, and Theory (KNOTH), Novosibirsk, Russia, 8–12 November 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Massel, L.; Massel, A. Development of Digital Twins and Digital Shadows of Energy Objects and Systems Using Scientific Tools for Energy Research. E3S Web Conf. 2020, 209, 02019. [Google Scholar] [CrossRef]
- Andryushkevich, S.K.; Kovalyov, S.P.; Nefedov, E. Composition and Application of Power System Digital Twins Based on Ontological Modeling. In Proceedings of the 2019 IEEE 17th International Conference on Industrial Informatics (INDIN), Helsinki, Finland, 22–25 July 2019; pp. 1536–1542. [Google Scholar] [CrossRef]
- Junior, C.A.; Villanueva, J.; Medeiros, I.; Almeida, R. Digital Twin Design for Thermal Power Plant Cooling System using Fuzzy System. In Proceedings of the 2021 14th IEEE International Conference on Industry Applications (INDUSCON), São Paulo, Brazil, 16–18 August 2021; pp. 661–666. [Google Scholar] [CrossRef]
- Lermer, M.; Reich, C. Creation of Digital Twins by Combining Fuzzy Rules with Artificial Neural Networks. In Proceedings of the IECON 2019—45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; pp. 5849–5854. [Google Scholar] [CrossRef]
- Kryukov, A.V.; Kargapol’cev, S.K.; Bulatov, Y.N.; Skrypnik, O.N.; Kuznetsov, B.F. Intelligent control of the regulators adjustment of the distributed generation installation. Far East J. Electron. Commun. 2017, 17, 1127–1140. [Google Scholar] [CrossRef]
- Jang, J.-S.R. ANFIS: Adaptive-network-based fuzzy inference system. IEEE Trans. Syst. Man Cybern. 1993, 23, 665–685. [Google Scholar] [CrossRef]
- Yager, R.; Filev, D. Essentials of Fuzzy Modeling and Control; John Wiley & Sons: Hoboken, NJ, USA, 1984; p. 387. [Google Scholar]
- Bulatov, Y.N.; Kryukov, A.V. Optimization of automatic regulator settings of the distributed generation plants on the basis of genetic algorithm. In Proceedings of the 2nd International Conference on Industrial Engineering, Applications and Manufacturing (ICIEAM), Chelyabinsk, Russia, 19–20 May 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Liu, F.; Li, R.; Dreglea, A. Wind Speed and Power Ultra Short-Term Robust Forecasting Based on Takagi–Sugeno Fuzzy Model. Energies 2019, 12, 3551. [Google Scholar] [CrossRef]
- Cordon, O.; Herrera, F.; Zwir, I. Linguistic modeling by hierarchical systems of linguistic rules. IEEE Trans. Fuzzy Syst. 2002, 10, 2–20. [Google Scholar] [CrossRef]
- Michalewicz, Z. Genetic Algorithms + Data Structures = Evolution Programs; Springer: Berlin/Heidelberg, Germany, 1996; 387p. [Google Scholar]
- Panasetsky, D.; Sidorov, D.; Li, Y.; Ouyang, L.; Xiong, J.; He, L. Centralized emergency control for multi-terminal VSC-based shipboard power systems. Int. J. Electr. Power Energy Syst. 2019, 104, 205–214. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Rated generator power, S | 24 MVA |
| Rated voltage, U | 6000 V |
| Frequency, f | 50 Hz |
| Stator active resistance, Rs | 0.008979 p.u. |
| Stator leakage inductance, LI | 0.05 p.u. |
| Stator inductance in the longitudinal axis, Lmd | 2.35 p.u. |
| Stator inductance in the transverse axis, Lmq | 1.72 p.u. |
| Excitation-winding resistance, Rf | 0.00206 p.u. |
| Rotor excitation-winding inductance, LIfd | 0.511 p.u. |
| Damper-winding resistance in the longitudinal axis, Rkd | 0.0652 p.u. |
| Damper-winding inductance in the longitudinal axis, LIkd | 0.5134 p.u. |
| Damper-winding resistance in the transverse axis, Rkq1 | 0.0287 p.u. |
| Damper-winding inductance in the transverse axis, LIkq1′ | 0.2553 p.u. |
| Inertia coefficient (inertial constant), H | 2.8485 s |
| Friction coefficient, F | 0.009238 p.u. |
| Number of pairs of poles, p | 3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bulatov, Y.; Kryukov, A.; Batuhtin, A.; Suslov, K.; Korotkova, K.; Sidorov, D. Digital Twin Formation Method for Distributed Generation Plants of Cyber–Physical Power Supply Systems. Mathematics 2022, 10, 2886. https://doi.org/10.3390/math10162886
Bulatov Y, Kryukov A, Batuhtin A, Suslov K, Korotkova K, Sidorov D. Digital Twin Formation Method for Distributed Generation Plants of Cyber–Physical Power Supply Systems. Mathematics. 2022; 10(16):2886. https://doi.org/10.3390/math10162886
Chicago/Turabian StyleBulatov, Yuri, Andrey Kryukov, Andrey Batuhtin, Konstantin Suslov, Ksenia Korotkova, and Denis Sidorov. 2022. "Digital Twin Formation Method for Distributed Generation Plants of Cyber–Physical Power Supply Systems" Mathematics 10, no. 16: 2886. https://doi.org/10.3390/math10162886
APA StyleBulatov, Y., Kryukov, A., Batuhtin, A., Suslov, K., Korotkova, K., & Sidorov, D. (2022). Digital Twin Formation Method for Distributed Generation Plants of Cyber–Physical Power Supply Systems. Mathematics, 10(16), 2886. https://doi.org/10.3390/math10162886