
Local H∞ Control for Continuous-Time T-S Fuzzy Systems via Generalized Non-Quadratic Lyapunov Functions


Abstract
:1. Introduction
- (1)
- (2)
- (3)
- The extended stabilization conditions for performance are obtained by polynomial technology. As q increases, conservatism of obtained conditions will reduce, and the proposed method can be generalized to handle other cases, such as output feedback controller design [5], finite-time annular domain stability [29], mean-square strong stability [30].
2. Problem Statement and Preliminaries
2.1. The T-S Fuzzy System
2.2. Notations and Properties
- (1)
- , where satisfies , and ;
- (2)
- : ;
- (3)
- : .
- (1)
- Find symmetric matrix , such that .
- (2)
- Find symmetric matrix , , , such that
3. Main Results
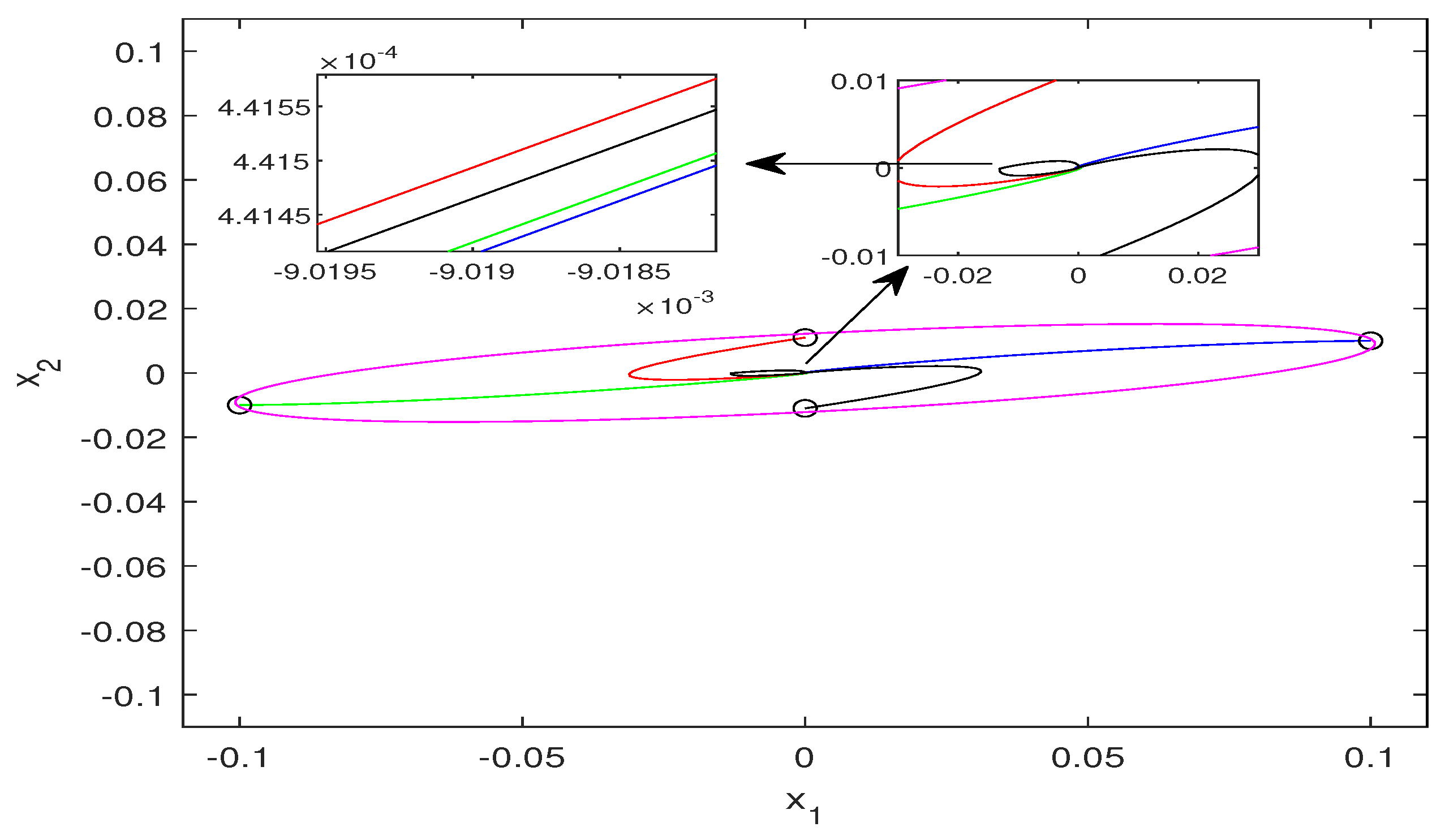
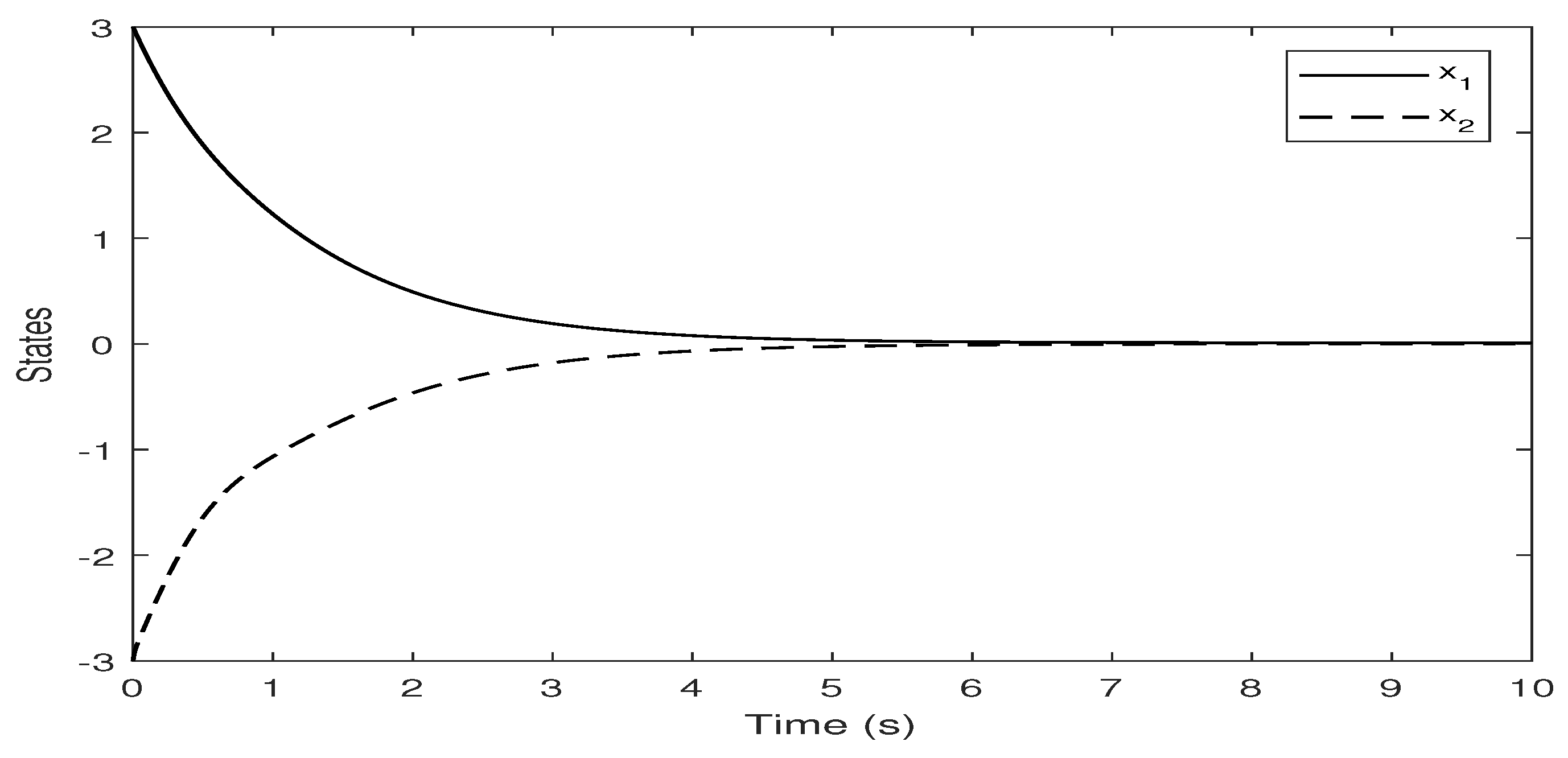
4. Simulation Example
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Takagi, T.; Sugeno, M. Fuzzy identification of systems and its applications to modeling and control. IEEE Trans. Syst. Man Cybern. 1985, 15, 387–403. [Google Scholar] [CrossRef]
- Su, X.J.; Wu, L.G.; Shi, P.; Song, Y.D. A novel approach to output feedback control of fuzzy stochastic systems. Automatica 2014, 50, 3268–3275. [Google Scholar] [CrossRef]
- Vafamand, N.; Asemani, M.H.; Khayatiyan, A.; Khooban, M.H.; Dragicevic, T. TS Fuzzy Model-Based Controller Design for a Class of Nonlinear Systems Including Nonsmooth Functions. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 233–244. [Google Scholar] [CrossRef]
- Achour, H.; Boukhetala, D.; Labdelaoui, H. An observer-based robust H∞ controller design for uncertain Takagi-Sugeno fuzzy systems with unknown premise variables using particle swarm optimisation. Int. J. Syst. Sci. 2020, 51, 2563–2581. [Google Scholar] [CrossRef]
- Yan, Z.; Zhang, J.; Hu, G. A new approach to fuzzy output feedback controller design of continuous-time Takagi-Sugeno fuzzy systems. Int. J. Fuzzy Syst. 2020, 22, 2223–2235. [Google Scholar] [CrossRef]
- Chang, X.H.; Yang, G.H.; Wang, H. Observer-based H∞ control for discrete-time T-S fuzzy systems. Int. J. Syst. Sci. 2011, 42, 1801–1809. [Google Scholar] [CrossRef]
- Wang, L.K.; Zhang, H.G.; Liu, X.D. H∞ Observer Design for Continuous-Time Takagi-Sugeno Fuzzy Model with Unknown Premise Variables via Nonquadratic Lyapunov Function. IEEE Trans. Cybern. 2016, 46, 1986–1996. [Google Scholar] [CrossRef]
- Zhang, Z.; Lin, C.; Chen, B. New decentralized H∞ filter design for nonlinear interconnected systems based on Takagi-Sugeno fuzzy models. IEEE Trans. Cybern. 2015, 45, 2914–2924. [Google Scholar] [CrossRef] [PubMed]
- Shi, P.; Su, X.; Li, F. Dissipativity-based filtering for fuzzy switched systems with stochastic perturbation. IEEE Trans. Autom. Control 2016, 61, 1694–1699. [Google Scholar] [CrossRef]
- Dong, J.; Yang, G. H∞ Filtering for Continuous-Time T-S Fuzzy Systems with Partly Immeasurable Premise Variables. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 1931–1940. [Google Scholar] [CrossRef]
- Tanaka, K.; Hori, T.; Wang, H.O. A multiple Lyapunov function approach to stabilization of fuzzy control systems. IEEE Trans. Fuzzy Syst. 2003, 11, 582–589. [Google Scholar] [CrossRef]
- Guerra, T.M.; Vermeiren, L. LMI-based relaxed nonquadratic stabilization conditions for nonlinear systems in the Takagi-Sugeno’s form. Automatica 2004, 40, 823–829. [Google Scholar] [CrossRef]
- Rhee, B.J.; Won, S. A new fuzzy Lyapunov function approach for a Takagi-Sugeno fuzzy control system design. Fuzzy Sets Syst. 2006, 157, 1211–1228. [Google Scholar] [CrossRef]
- Bernal, M.; Guerra, T.M. Generalized nonquadratic stability of continuous-time Takagi-Sugeno models. IEEE Trans. Fuzzy Syst. 2010, 18, 815–822. [Google Scholar] [CrossRef]
- Ding, B. Homogeneous polynomially nonquadratic stabilization of discrete-time Takagi-Sugeno systems via nonparallel distributed compensation law. IEEE Trans. Fuzzy Syst. 2010, 18, 994–1000. [Google Scholar] [CrossRef]
- Zhang, H.; Xie, X. Relaxed stability conditions for continuous-time T-S fuzzy-control systems via augmented multi-indexed matrix approach. IEEE Trans. Fuzzy Syst. 2011, 19, 478–492. [Google Scholar] [CrossRef]
- Hu, G.; Liu, X.; Wang, L.; Li, H. Relaxed stability and stabilisation conditions for continuous-time Takagi-Sugeno fuzzy systems using multiple-parameterised approach. IET Control Theory Appl. 2017, 11, 774–780. [Google Scholar] [CrossRef]
- Delmotte, F.; Guerra, T.M.; Ksantini, M. Continuous Takagi-Sugeno’s models: Reduction of the number of LMI conditions in various fuzzy control design technics. IEEE Trans. Fuzzy Syst. 2007, 15, 426–438. [Google Scholar] [CrossRef]
- Sala, A.; Arino, C. Asymptotically necessary and sufficient conditions for stability and performance in fuzzy control: Applications of Polya’s theorem. Fuzzy Sets Syst. 2007, 158, 2671–2686. [Google Scholar] [CrossRef]
- Vafamand, N.; Khooban, M.H.; Khayatian, A.; Blaabjerg, F. Design of Robust Double-Fuzzy-Summation Non-PDC Controller for Chaotic Power Systems. J. Dyn. Syst. Meas. Control 2018, 140, 031004. [Google Scholar] [CrossRef]
- Wang, L.; Lam, H. H∞ control for continuous-time Takagi-Sugeno fuzzy model by applying generalized Lyapunov function and introducing outer variables. Automatica 2021, 125, 109409. [Google Scholar] [CrossRef]
- Faria, F.A.; Silva, G.N.; Oliveira, V.A. Reducing the conservatism of LMI-based stabilisation conditions for T-S fuzzy systems using fuzzy Lyapunov functions. Int. J. Syst. Sci. 2013, 44, 1956–1969. [Google Scholar] [CrossRef]
- Pan, J.; Guerra, T.M.; Fei, S.; Jaadari, A. Nonquadratic stabilization of continuous T-S fuzzy models: LMI solution for a local approach. IEEE Trans. Fuzzy Syst. 2012, 20, 594–602. [Google Scholar] [CrossRef]
- Marquez, R.; Guerra, T.M.; Bernal, M.; Kruszewski, A. Asymptotically necessary and sufficient conditions for Takagi-Sugeno models using generalized non-quadratic parameter-dependent controller design. Fuzzy Sets Syst. 2017, 306, 48–62. [Google Scholar] [CrossRef]
- Vafamand, N.; Asemani, M.H.; Khayatian, A. Robust L1 Observer-based Non-PDC Controller Design for Persistent Bounded Disturbed TS Fuzzy Systems. IEEE Trans. Fuzzy Syst. 2017, 26, 1401–1413. [Google Scholar] [CrossRef]
- Wang, L.; Liu, J.; Lam, H.K. Further study on stabilization for continuous-time Takagi-Sugeno fuzzy systems with time delay. IEEE Trans. Cybern. 2021, 51, 5637–5643. [Google Scholar] [CrossRef]
- Hu, G.; Wang, L.; Liu, X. A new approach to local H∞ control for continuous-time T-S fuzzy models. J. Intell. Fuzzy Syst. 2020, 39, 213–220. [Google Scholar] [CrossRef]
- Wang, L.; Peng, J.; Liu, X. An approach to observer design of continuous-time Takagi-Sugeno fuzzy model with bounded disturbances. Inf. Sci. 2015, 324, 108–125. [Google Scholar] [CrossRef]
- Yan, Z.; Zhang, M.; Chang, G.; Lv, H.; Park, J. Finite-time annular domain stability and stabilization of Ito stochastic systems with Wiener noise and Poisson jumps-differential Gronwall inequality approach. Appl. Math. Comput. 2022, 412, 1–12. [Google Scholar] [CrossRef]
- Yan, Z.; Su, F.; Gao, Z. Mean-square strong stability and stabilization of discrete-time stochastic systems with multiplicative noises. Int. J. Robust Nonlinear Control 2022, 32, 6767–6784. [Google Scholar] [CrossRef]
- Hu, G.; Liu, X.; Wang, L.; Li, H. An extended approach to controller design of continuous-time Takagi-Sugeno fuzzy model. J. Intell. Fuzzy Syst. 2018, 34, 2235–2246. [Google Scholar] [CrossRef]
- Xie, X.P.; Liu, Z.W.; Zhu, X.L. An efficient approach for reducing the conservatism of LMI-based stability conditions for continuous-time TiCS fuzzy systems. Fuzzy Sets Syst. 2015, 263, 71–81. [Google Scholar] [CrossRef]
- Wang, L.; Liu, X.; Zhang, H. Further studies on H∞ observer design for continuous-time T-S fuzzy model. Inf. Sci. 2018, 422, 396–407. [Google Scholar] [CrossRef]
- Kim, S.H. Relaxation technique for a T-S fuzzy control design based on a continuous-time fuzzy weighting-dependent Lyapunov function. IEEE Trans. Fuzzy Syst. 2013, 21, 761–766. [Google Scholar] [CrossRef]
- Chen, S.H.; Ho, W.H.; Tsai, J.T.; Chou, J.H. Regularity and controllability robustness of TS fuzzy descriptor systems with structured parametric uncertainties. Inf. Sci. 2014, 277, 36–55. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Computational Time | |
|---|---|---|
| [23] | – | |
| [34] (Theorem 1) | 0.1896 | 0.2015 s |
| [33] (Theorem 1) | 0.0483 | 1.4590 s |
| [27] (Theorem 1) | 0.0434 | 0.3305 s |
| Corollary 1 (q = 1) | 0.0511 | 0.4590 s |
| Corollary 1 (q = 2) | 0.0409 | 0.9586 s |
| Corollary 1 (q = 3) | 0.0345 | 1.6205 s |
| Theorem 1 (q = 1) | 0.0506 | 0.5160 s |
| Theorem 1 (q = 2) | 0.0407 | 1.0272 s |
| Theorem 1 (q = 3) | 0.0338 | 2.2055 s |
| Methods | = 0.1 | = 0.2 | = 0.3 | = 0.4 | = 0.7 | = 1 |
|---|---|---|---|---|---|---|
| Corollary 1 (q = 1) | 0.0538 | 0.0567 | 0.0598 | 0.0630 | 0.0742 | 0.0878 |
| Corollary 1 (q = 2) | 0.0391 | 0.0374 | 0.0359 | 0.344 | 0.0307 | 0.0281 |
| Corollary 1 (q = 3) | 0.0334 | 0.0323 | 0.0313 | 0.0304 | 0.0280 | 0.0260 |
| Theorem 1 (q = 1) | 0.0506 | 0.0480 | 0.0457 | 0.0414 | 0.0361 | 0.0332 |
| Theorem 1 (q = 2) | 0.0387 | 0.0368 | 0.0350 | 0.0334 | 0.0294 | 0.0271 |
| Theorem 1 (q = 3) | 0.0327 | 0.0317 | 0.0307 | 0.0298 | 0.0275 | 0.0259 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, G.; Zhang, J.; Yan, Z. Local H∞ Control for Continuous-Time T-S Fuzzy Systems via Generalized Non-Quadratic Lyapunov Functions. Mathematics 2022, 10, 3438. https://doi.org/10.3390/math10193438
Hu G, Zhang J, Yan Z. Local H∞ Control for Continuous-Time T-S Fuzzy Systems via Generalized Non-Quadratic Lyapunov Functions. Mathematics. 2022; 10(19):3438. https://doi.org/10.3390/math10193438
Chicago/Turabian StyleHu, Guolin, Jian Zhang, and Zhiguo Yan. 2022. "Local H∞ Control for Continuous-Time T-S Fuzzy Systems via Generalized Non-Quadratic Lyapunov Functions" Mathematics 10, no. 19: 3438. https://doi.org/10.3390/math10193438
APA StyleHu, G., Zhang, J., & Yan, Z. (2022). Local H∞ Control for Continuous-Time T-S Fuzzy Systems via Generalized Non-Quadratic Lyapunov Functions. Mathematics, 10(19), 3438. https://doi.org/10.3390/math10193438