
A Multi-Mechanism Seagull Optimization Algorithm Incorporating Generalized Opposition-Based Nonlinear Boundary Processing


Abstract
:1. Introduction
2. Related Work Overview
2.1. Status of Research
2.1.1. Traditional Research Advances
2.1.2. Recent Research Advances
3. Seagull Optimization Algorithm
3.1. Biological Characteristics
3.2. Biomathematical Modeling
3.2.1. Migration Behavior
3.2.2. Attacking Behavior
4. Design of the Proposed Seagull Optimization Algorithm
4.1. Adaptive Nonlinear Weighting Strategy
4.2. Evolutionary Boundary Constraint Handling Strategy
4.3. Opposition-Based Learning and Generalized Opposition-Based Learning
4.3.1. Opposition-Based Learning
- (Definition 1): Opposite number
- (Definition 2): Opposite point.
4.3.2. Generalized Opposition-Based Learning
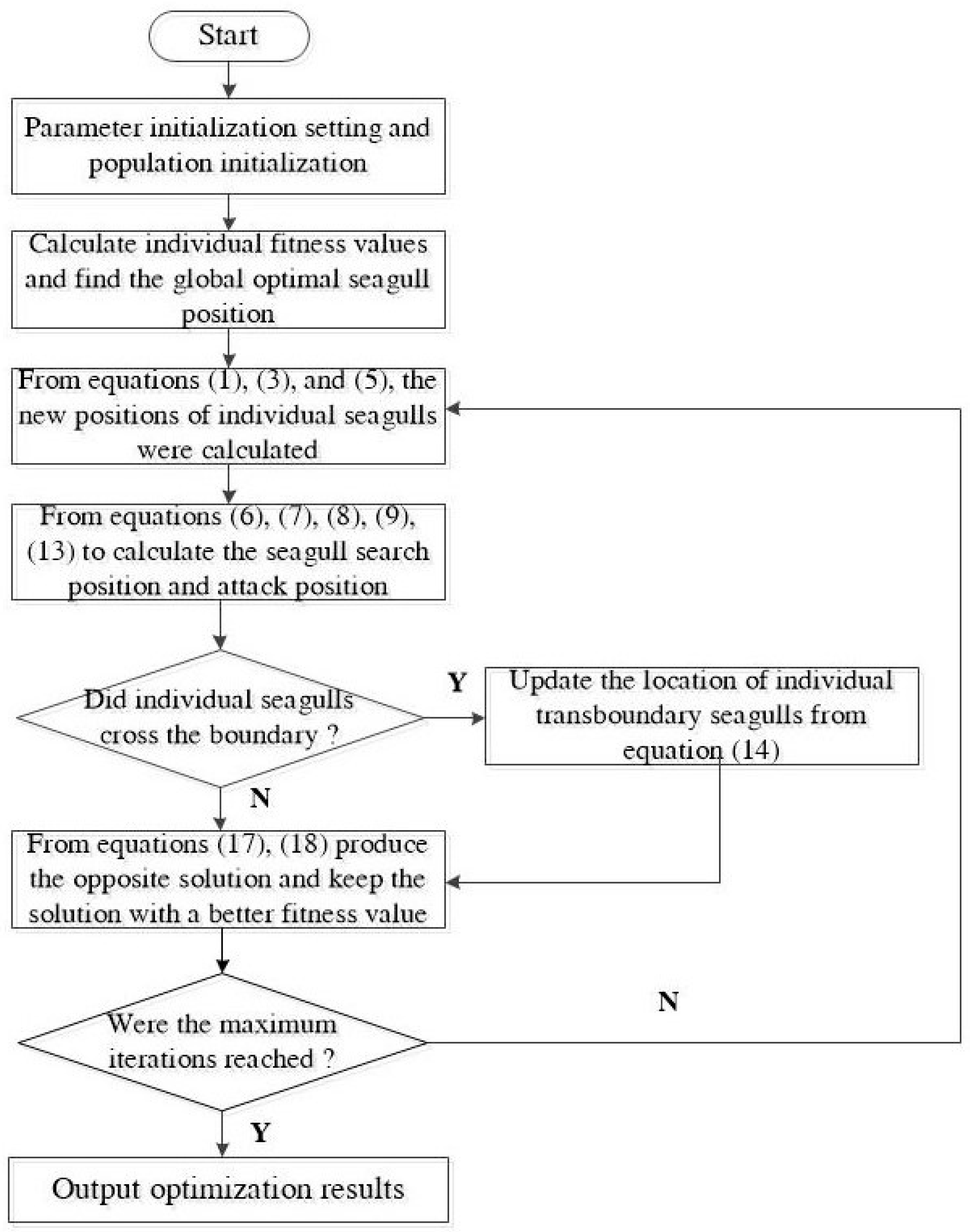
4.4. GEN−SOA Algorithm Description
4.5. Summary of Optimization
5. Experimental Simulation and Result Analysis
5.1. Simulation Experiment Environment and Parameter Setting
5.2. Test Functions
5.3. Simulation Results Analysis
5.3.1. GEN−SOA Compared with SOA
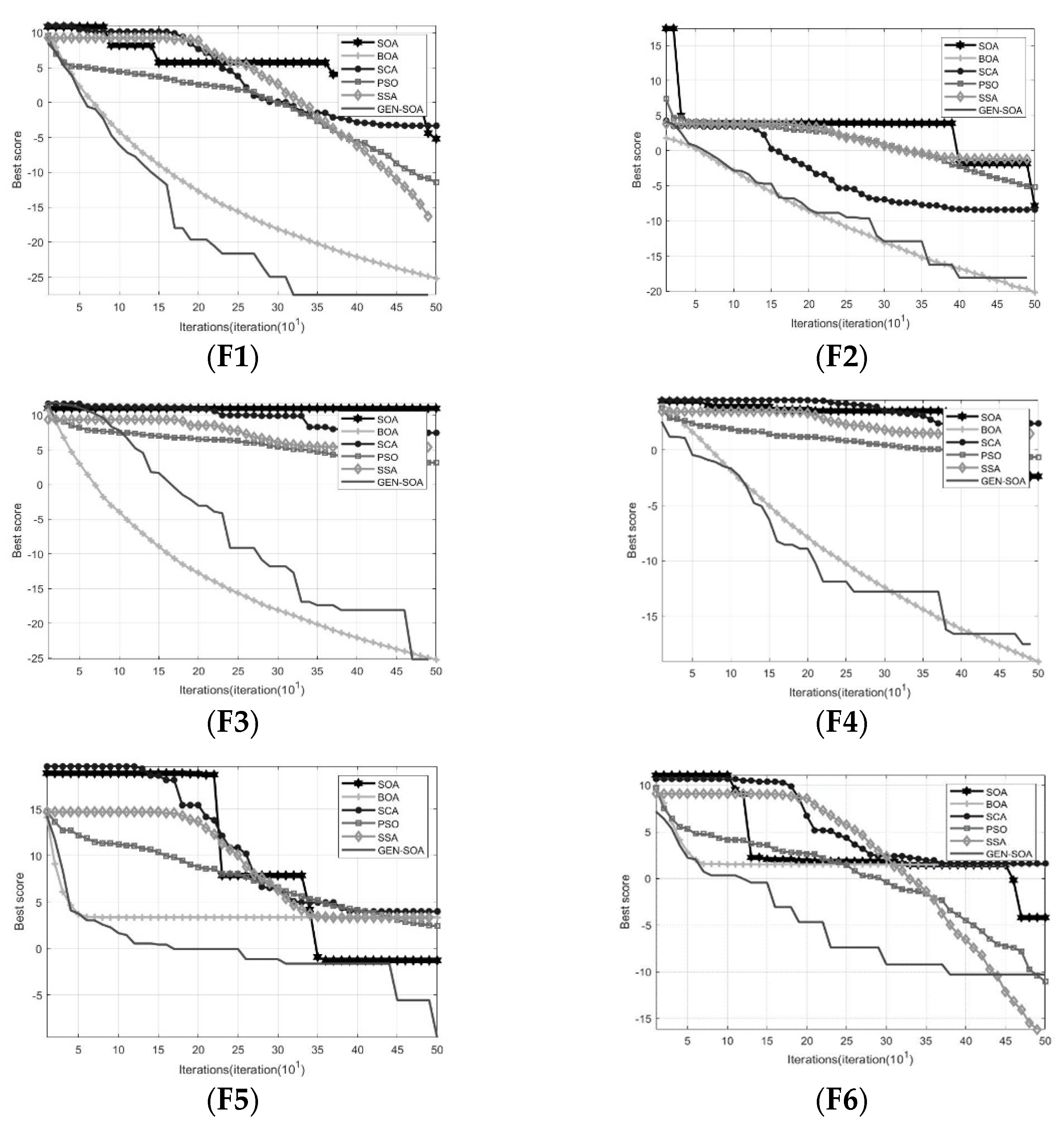
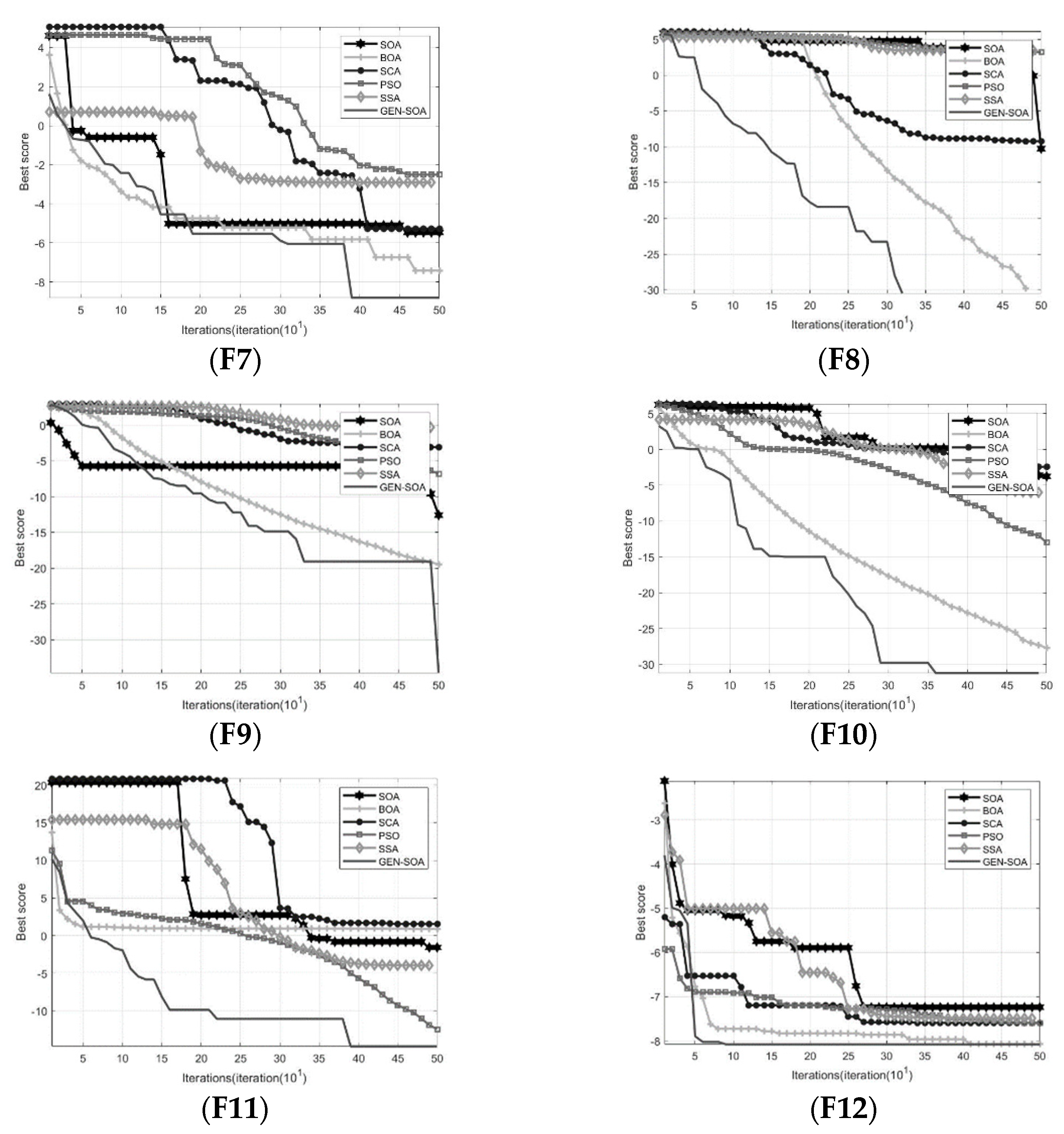
5.3.2. Comparison of GEN−SOA with Other Optimization Algorithms
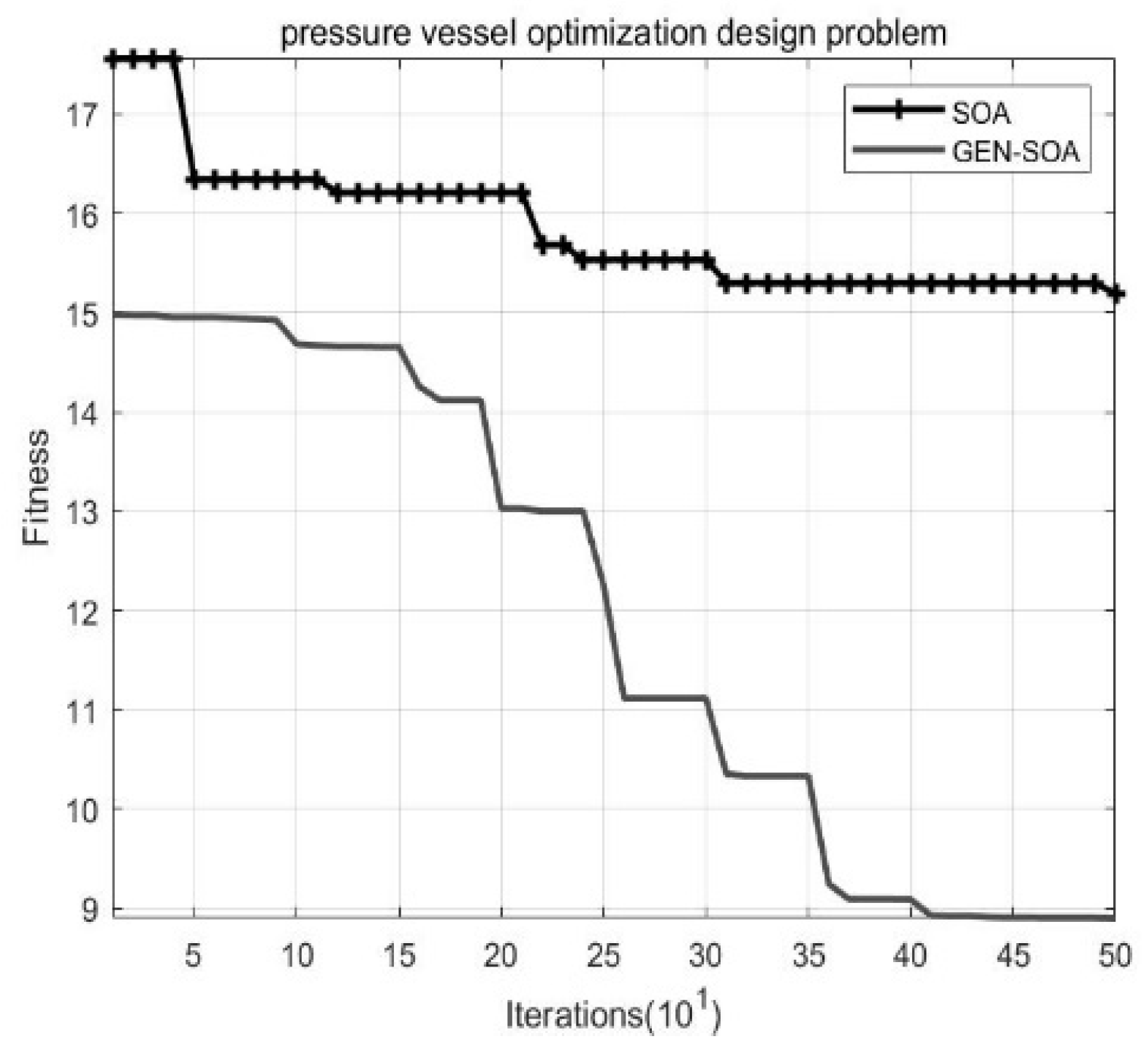
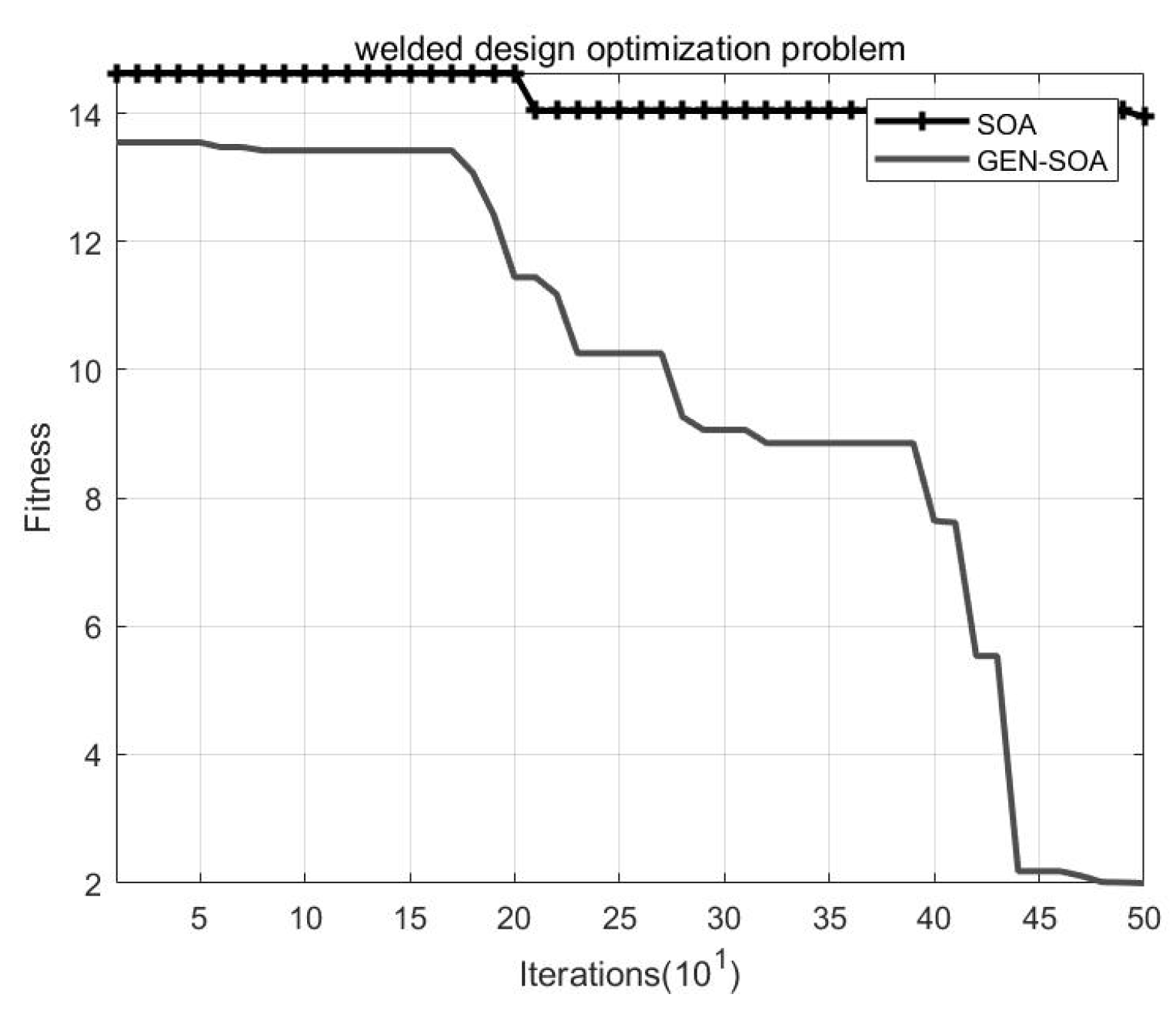
5.4. Performance Testing of GEN-SOA
5.5. Summary of Experiment
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yang, X.S. A new metaheuristic bat-inspired algorithm. In Nature Inspired Cooperative Strategies for Optimization (NICSO 2010); Springer: Berlin/Heidelberg, Germany, 2010; pp. 65–74. [Google Scholar]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95-International Conference on Neural Networks, Perth, WA, Australia, 27 November 1995–1 December 1995; IEEE: Piscataway, NJ, USA, 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Mirjalili, S.; Lewis, A. The whale optimization algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Mirjalili, S. SCA: A sine cosine algorithm for solving optimization problems. Knowl.-Based Syst. 2016, 96, 120–133. [Google Scholar] [CrossRef]
- Emary, E.; Zawbaa, H.M.; Hassanien, A.E. Binary grey wolf optimization approaches for feature selection. Neurocomputing 2016, 172, 371–381. [Google Scholar] [CrossRef]
- Arora, S.; Singh, S. Butterfly optimization algorithm: A novel approach for global optimization. Soft Comput. 2019, 23, 715–734. [Google Scholar] [CrossRef]
- Dhiman, G.; Kumar, V. Seagull optimization algorithm: Theory and its applications for large-scale industrial engineering problems. Knowl.-Based Syst. 2019, 165, 169–196. [Google Scholar] [CrossRef]
- Dhiman, G.; Singh, K.K.; Soni, M.; Nagar, A.; Dehghani, M.; Slowik, A.; Kaur, A.; Sharma, A.; Houssein, E.H.; Cengiz, K. MOSOA: A new multi-objective seagull optimization algorithm. Expert Syst. Appl. 2021, 167, 114150. [Google Scholar] [CrossRef]
- Dhiman, G.; Singh, K.K.; Slowik, A.; Chang, V.; Yildiz, A.R.; Kaur, A.; Garg, M. EMoSOA: A new evolutionary multi-objective seagull optimization algorithm for global optimization. Int. J. Mach. Learn. Cybern. 2021, 12, 571–596. [Google Scholar] [CrossRef]
- Ewees, A.A.; Mostafa, R.R.; Ghoniem, R.M.; Gaheen, M.A. Improved seagull optimization algorithm using Lévy flight and mutation operator for feature selection. Neural Comput. Appl. 2022, 34, 7437–7472. [Google Scholar] [CrossRef]
- Mao, Q.-H.; Wang, Y.-G. Adaptive T-distribution Seagull Optimization Algorithm Combining Improved Logistics Chaos and Sine-Cosine Operator. J. Chin. Comput. Syst. 2022, 1–9. Available online: http://kns.cnki.net/kcms/detail/21.1106.TP.20211019.1549.006.html (accessed on 22 March 2022).
- Wang, J.; Qin, J. Improved seagull optimization algorithm based on chaotic map and t-distributed mutation strategy. Appl. Res. Comput. 2022, 39, 170–176+182. [Google Scholar] [CrossRef]
- Qin, W.-N.; Zhang, D.-M.; Yin, D.-X.; Cai, P.-C. Seagull Optimization Algorithm Based on Nonlinear Inertia Weight. J. Chin. Comput. Syst. 2022, 43, 10–14. [Google Scholar]
- Wang, N.; He, Q. Seagull optimization algorithm combining golden sine and sigmoid continuity. Appl. Res. Comput. 2022, 39, 157–162+169. [Google Scholar] [CrossRef]
- Zhang, B.-J.; He, Q.; Dai, S.-L.; Du, N.-S. Multi-directional Exploring Seagull Optimization Algorithm Based On Chaotic Map. J. Chin. Comput. Syst. 2022, 1–10. [Google Scholar]
- He, Q.; Wei, K.Y.; Xu, Q.S. Anenhanced whale optimization algorithm for the problems of functions optimization. Microelectron. Comput. 2019, 36, 72–77. [Google Scholar]
- Zhao, C.-W.; Huang, B.-Z.; Yan, Y.-G.; Dai, W.-C.; Zhang, J. An Adaptive Whale Optimization Algorithm of Nonlinear Inertia Weight. Comput. Technol. Dev. 2020, 30, 7–13. [Google Scholar]
- Gandomi, A.H.; Yang, X.S. Evolutionary boundary constraint handling scheme. Neural Comput. Appl. 2012, 21, 1449–1462. [Google Scholar] [CrossRef]
- Zhao, P. Firefly Algorithm Based on Perturbed and Boundary Constraint Handling Scheme. Henan Sci. 2018, 36, 652–656. [Google Scholar]
- Tizhoosh, H.R. Opposition-based learning: A new scheme for machine intelligence. In Proceedings of the International Conference on Computational Intelligence for Modelling, Control and Automation and International Conference on Intelligent Agents, Web Technologies and Internet Commerce (CIMCA-IAWTIC’06), Vienna, Austria, 28–30 November 2005; IEEE: Piscataway, NJ, USA, 2005; Volume 1, pp. 695–701. [Google Scholar]
- Wang, H. A framework of population-based stochastic search algorithm with generalized opposition-based learning. J. Nanchang Inst. Technol. 2012, 31, 1–6. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Function F | Algorithm | Minimal Value | Mean | Standard Deviation |
|---|---|---|---|---|
| F1 | SOA | 2.8275e−03 | 2.5640e+02 | 6.8811e+02 |
| GEN−SOA | 0.0000e+00 | 0.0000e+00 | 0.0000e+00 | |
| F2 | SOA | 1.8919e−03 | 1.5468e+00 | 1.9305e+00 |
| GEN−SOA | 0.0000e+00 | 0.0000e+00 | 0.0000e+00 | |
| F3 | SOA | 7.1265e+04 | 1.2698e+05 | 4.5570e+04 |
| GEN−SOA | 0.0000e+00 | 0.0000e+00 | 0.0000e+00 | |
| F4 | SOA | 8.3791e−01 | 6.2427e+01 | 3.2497e+01 |
| GEN−SOA | 0.0000e+00 | 0.0000e+00 | 0.0000e+00 | |
| F5 | SOA | 6.4729e−01 | 2.4308e+05 | 6.4797e+05 |
| GEN−SOA | 2.5481e−04 | 1.9119e−02 | 4.3778e−02 | |
| F6 | SOA | 5.3630e−02 | 1.4260e+02 | 3.4514e+02 |
| GEN−SOA | 5.0505e−04 | 4.1147e−02 | 6.7025e−02 | |
| F7 | SOA | 1.2980e−03 | 2.4578e−01 | 4.3941e−01 |
| GEN−SOA | 2.1778e−05 | 1.0239e−03 | 8.0859e−04 | |
| F8 | SOA | 9.4969e−03 | 3.0987e+01 | 3.9918e+01 |
| GEN−SOA | 0.0000e+00 | 0.0000e+00 | 0.0000e+00 | |
| F9 | SOA | 2.2230e−05 | 2.5503e−01 | 6.8343e−01 |
| GEN−SOA | 8.8818e−16 | 8.8818e−16 | 0.0000e+00 | |
| F10 | SOA | 2.7151e−02 | 3.0575e+00 | 4.1545e+00 |
| GEN−SOA | 0.0000e+00 | 0.0000e+00 | 0.0000e+00 | |
| F11 | SOA | 4.1899e−03 | 1.5062e+06 | 6.8057e+06 |
| GEN−SOA | 9.6637e−09 | 9.4239e−05 | 1.0249e−04 | |
| F12 | SOA | 1.6553e−03 | 3.8346e+03 | 1.9921e+04 |
| GEN−SOA | 3.0926e−04 | 5.4151e−04 | 3.5135e−04 | |
| Attention: 1.0000e−03 represents 1.0000 × 10−3 |
| Function F | Algorithm | Minimal Value | Mean | Standard Deviation |
|---|---|---|---|---|
| F1 | SOA | 5.5705e−03 | 3.1475e+02 | 7.5539e+02 |
| BOA | 1.0990e−11 | 1.3180e−11 | 7.6353e−13 | |
| SCA | 3.5533e−02 | 1.1023e+01 | 1.9456e+01 | |
| PSO | 1.0821e−05 | 1.8561e−04 | 2.2138e−04 | |
| SSA | 3.3465e−08 | 4.6773e−07 | 1.3929e−06 | |
| GEN−SOA | 0.0000e+00 | 0.0000e+00 | 0.0000e+00 | |
| F2 | SOA | 4.0499e−04 | 1.8834e+00 | 1.5593e+00 |
| BOA | 1.7935e−09 | 4.1067e−09 | 1.5239e−09 | |
| SCA | 2.2503e−04 | 1.3779e−02 | 1.6216e−02 | |
| PSO | 5.8455e−03 | 4.3850e−02 | 5.2308e−02 | |
| SSA | 3.1035e−01 | 1.8321e+00 | 9.8341e−01 | |
| GEN−SOA | 0.0000e+00 | 0.0000e+00 | 0.0000e+00 | |
| F3 | SOA | 5.9451e+04 | 1.2946e+05 | 5.6264e+04 |
| BOA | 1.1093e−11 | 1.2546e−11 | 7.8270e−13 | |
| SCA | 1.7390e+03 | 8.9620e+03 | 6.0929e+03 | |
| PSO | 2.3680e+01 | 7.8689e+01 | 2.7372e+01 | |
| SSA | 2.1609e+02 | 1.6380e+03 | 9.0674e+02 | |
| GEN−SOA | 0.0000e+00 | 0.0000e+00 | 0.0000e+00 | |
| F4 | SOA | 9.3174e−02 | 5.3476e+01 | 3.4563e+01 |
| BOA | 5.0831e−09 | 6.1893e−09 | 3.2965e−10 | |
| SCA | 1.0992e+01 | 3.6173e+01 | 1.2981e+01 | |
| PSO | 5.1537e−01 | 1.0823e+00 | 2.6818e−01 | |
| SSA | 4.3892e+00 | 1.1410e+01 | 3.6886e+00 | |
| GEN−SOA | 0.0000e+00 | 0.0000e+00 | 0.0000e+00 | |
| F5 | SOA | 2.7861e−01 | 4.5464e+05 | 1.9051e+06 |
| BOA | 2.8852e+01 | 2.8935e+01 | 3.2223e−02 | |
| SCA | 5.4033e+01 | 1.6382e+04 | 4.3169e+04 | |
| PSO | 1.1251e+01 | 1.2464e+02 | 8.6469e+01 | |
| SSA | 2.7336e+01 | 2.2845e+02 | 3.2376e+02 | |
| GEN−SOA | 6.9571e−05 | 1.6495e−02 | 3.1675e−02 | |
| F6 | SOA | 1.5246e−02 | 1.5274e+02 | 4.0155e+02 |
| BOA | 4.3909e+00 | 5.6262e+00 | 7.4488e−01 | |
| SCA | 4.9059e+00 | 1.9951e+01 | 2.2365e+01 | |
| PSO | 1.6081e−05 | 2.4493e−04 | 5.5651e−04 | |
| SSA | 3.9779e−08 | 1.9503e−07 | 4.1929e−07 | |
| GEN−SOA | 3.4420e−05 | 6.4084e−02 | 1.0824e−01 | |
| F7 | SOA | 4.2231e−03 | 1.3850e−01 | 1.9401e−01 |
| BOA | 6.0478e−04 | 1.4740e−03 | 6.6901e−04 | |
| SCA | 5.1751e−03 | 1.5355e−01 | 1.6426e−01 | |
| PSO | 8.1705e−02 | 1.7972e−01 | 7.2889e−02 | |
| SSA | 5.4324e−02 | 1.6609e−01 | 6.8852e−02 | |
| GEN−SOA | 1.4940e−04 | 8.6969e−04 | 7.3195e−04 | |
| F8 | SOA | 3.4831e−05 | 2.1340e−01 | 5.1107e−01 |
| BOA | 0.0000e+00 | 4.3704e+01 | 7.9380e+01 | |
| SCA | 9.8702e−05 | 4.6418e+01 | 3.0997e+01 | |
| PSO | 2.5024e+01 | 5.6589e+01 | 1.1871e+01 | |
| SSA | 3.0844e+01 | 5.7409e+01 | 1.8411e+01 | |
| GEN−SOA | 0.0000e+00 | 0.0000e+00 | 0.0000e+00 | |
| F9 | SOA | 3.4462e−06 | 1.6553e+01 | 2.6461e+01 |
| BOA | 3.6048e−09 | 5.9321e−09 | 5.7171e−10 | |
| SCA | 4.6654e−02 | 1.4528e+01 | 8.6114e+00 | |
| PSO | 1.1023e−03 | 2.3887e−01 | 5.0739e−01 | |
| SSA | 7.6431e−01 | 2.8211e+00 | 7.6174e−01 | |
| GEN−SOA | 8.8818e−16 | 8.8818e−16 | 0.0000e+00 | |
| F10 | SOA | 2.2980e−02 | 9.4165e−02 | 1.5722e−01 |
| BOA | 9.3481e−13 | 5.0655e−12 | 2.2069e−12 | |
| SCA | 8.6876e−02 | 1.1251e+00 | 5.0442e−01 | |
| PSO | 2.2610e−06 | 6.7482e−03 | 6.8143e−03 | |
| SSA | 2.4708e−03 | 2.8211e+00 | 7.6174e−01 | |
| GEN−SOA | 0.0000e+00 | 0.0000e+00 | 0.0000e+00 | |
| F11 | SOA | 2.1108e−01 | 1.8830e+00 | 2.0135e+00 |
| BOA | 2.4732e+00 | 2.8531e+00 | 2.6660e−01 | |
| SCA | 4.8024e+00 | 1.8943e+05 | 3.9451e+05 | |
| PSO | 4.0481e−06 | 4.0536e−03 | 5.9102e−03 | |
| SSA | 1.9603e−02 | 1.4912e+01 | 1.3975e+01 | |
| GEN−SOA | 4.2256e−07 | 1.1751e−04 | 1.8398e−04 | |
| F12 | SOA | 7.1719e−04 | 2.4626e+05 | 6.7593e+05 |
| BOA | 3.1041e−04 | 3.8635e−04 | 7.2566e−05 | |
| SCA | 5.0323e−04 | 1.1968e−03 | 3.4658e−04 | |
| PSO | 4.9930e−04 | 8.7830e−04 | 1.7683e−04 | |
| SSA | 5.5978e−04 | 3.8762e−03 | 6.7479e−03 | |
| GEN−SOA | 3.1008e−04 | 4.2529e−04 | 9.8394e−05 | |
| Attention: 1.0000e−03 represents 1.0000 × 10−3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Li, G.; Shao, P. A Multi-Mechanism Seagull Optimization Algorithm Incorporating Generalized Opposition-Based Nonlinear Boundary Processing. Mathematics 2022, 10, 3295. https://doi.org/10.3390/math10183295
Liu X, Li G, Shao P. A Multi-Mechanism Seagull Optimization Algorithm Incorporating Generalized Opposition-Based Nonlinear Boundary Processing. Mathematics. 2022; 10(18):3295. https://doi.org/10.3390/math10183295
Chicago/Turabian StyleLiu, Xinyu, Guangquan Li, and Peng Shao. 2022. "A Multi-Mechanism Seagull Optimization Algorithm Incorporating Generalized Opposition-Based Nonlinear Boundary Processing" Mathematics 10, no. 18: 3295. https://doi.org/10.3390/math10183295
APA StyleLiu, X., Li, G., & Shao, P. (2022). A Multi-Mechanism Seagull Optimization Algorithm Incorporating Generalized Opposition-Based Nonlinear Boundary Processing. Mathematics, 10(18), 3295. https://doi.org/10.3390/math10183295