
Video Distance Measurement Technique Using Least Squares Based Sharpness Cost Function


Abstract
:1. Introduction
2. Materials and Methods
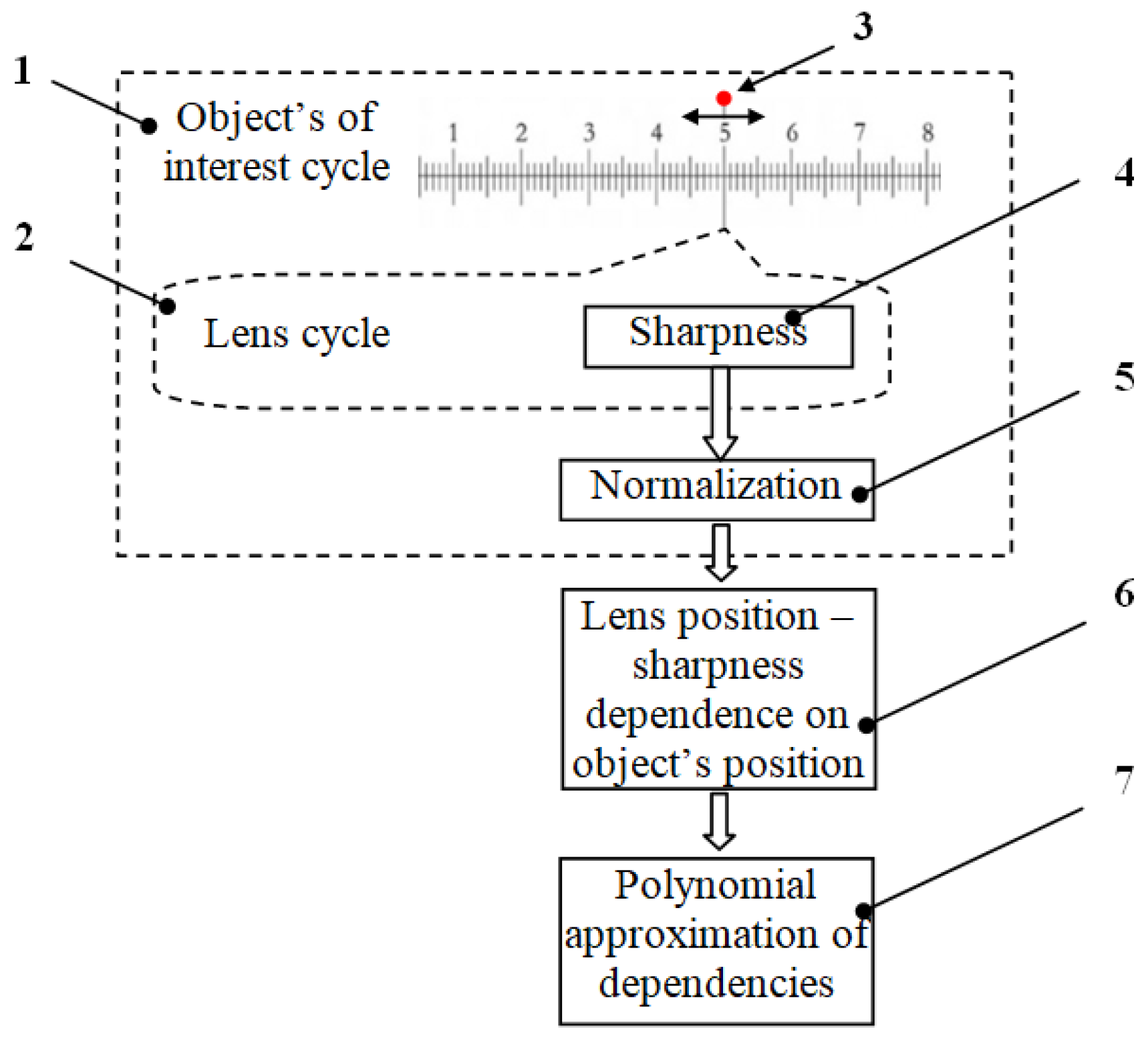
2.1. Method Description
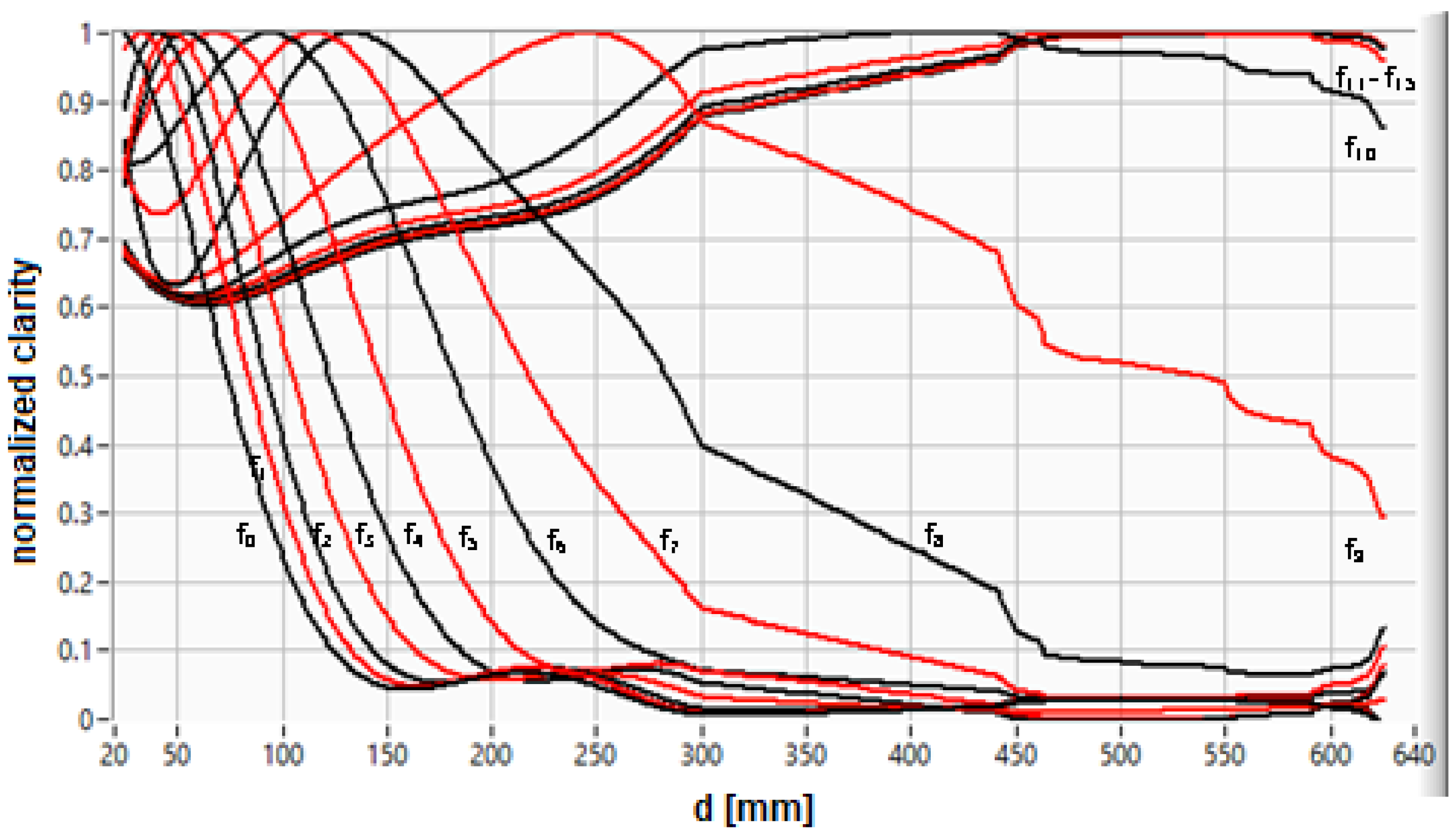
- establishing the dependence of the sharpness, for each position of the lens, on the position of the object of interest. A (n,m) mapping matrix is obtained with n and m being the number of the positions of the focus lens and the number of positions of the object of interest, respectively;
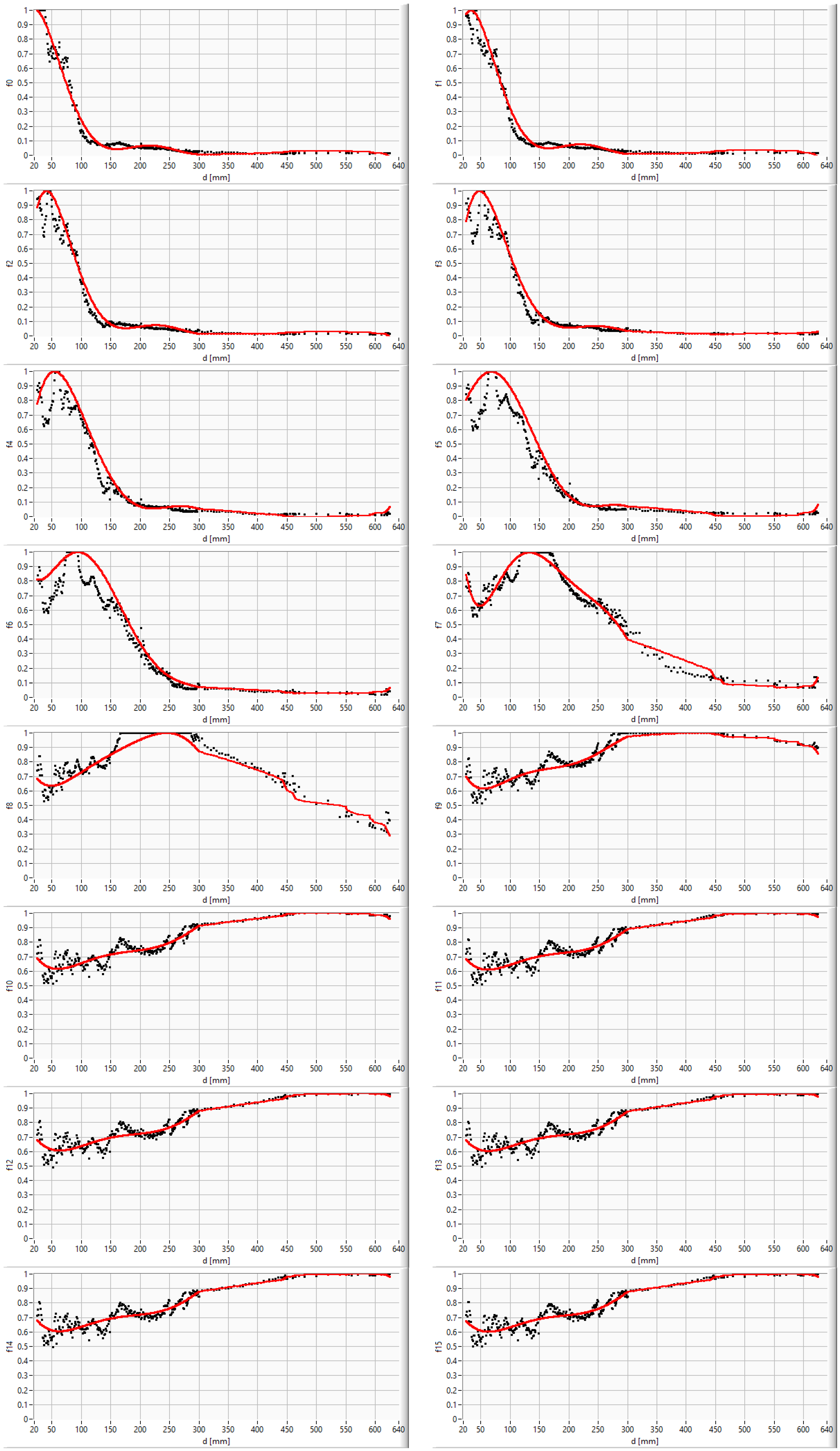
- approximating each dependency by a polynomial function Si and identification of the function coefficients.
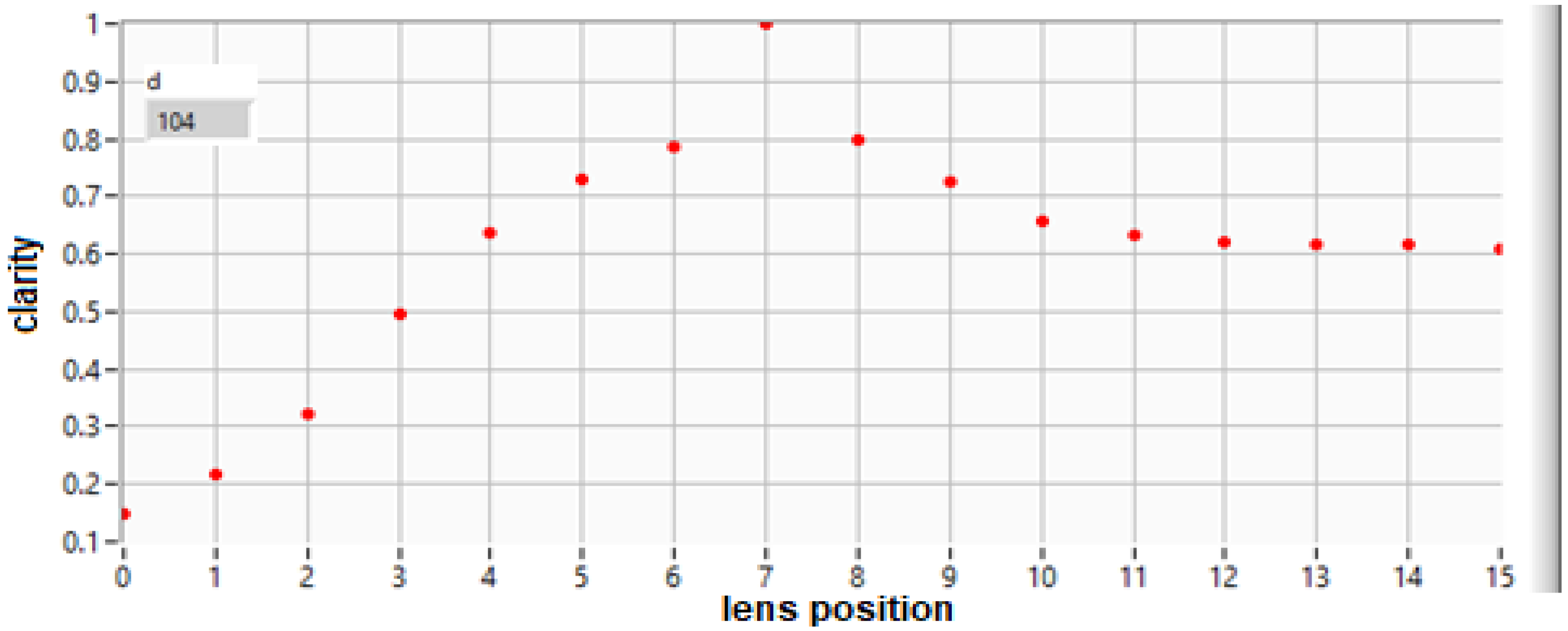
- taking a set of images of the object (stack) and calculating the sharpness for each position of the lens, Si_measured;
- calculating the Cost Function as being the square deviations between the measured sharpness and the sharpness obtained by calibration for each of the m possible positions of the object;
- ;
- establishing the index of the minimum of the square deviations, which yield the calculated distance;
- .
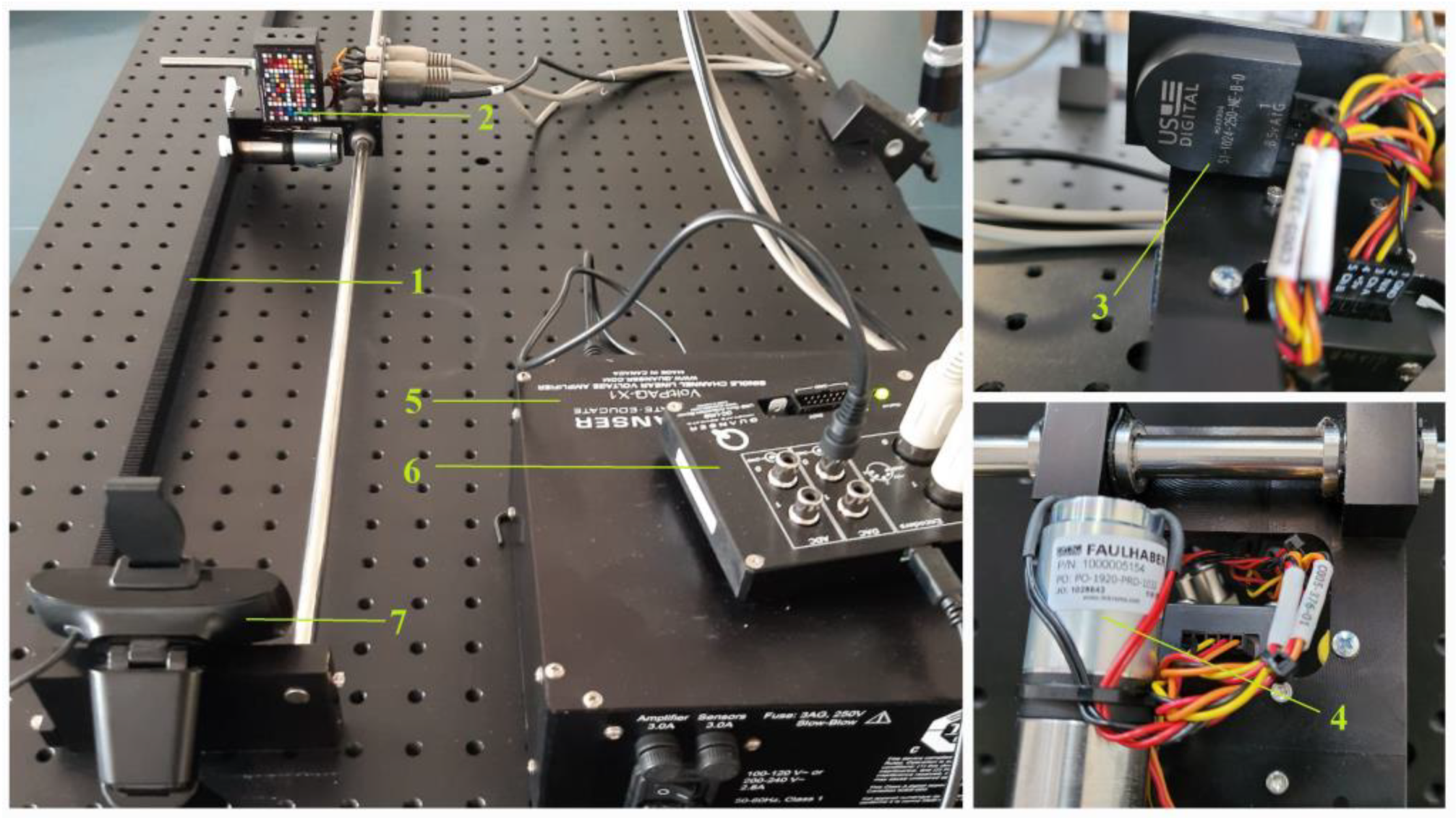
2.2. Experimental Setup
3. Results
3.1. Calibration Stage
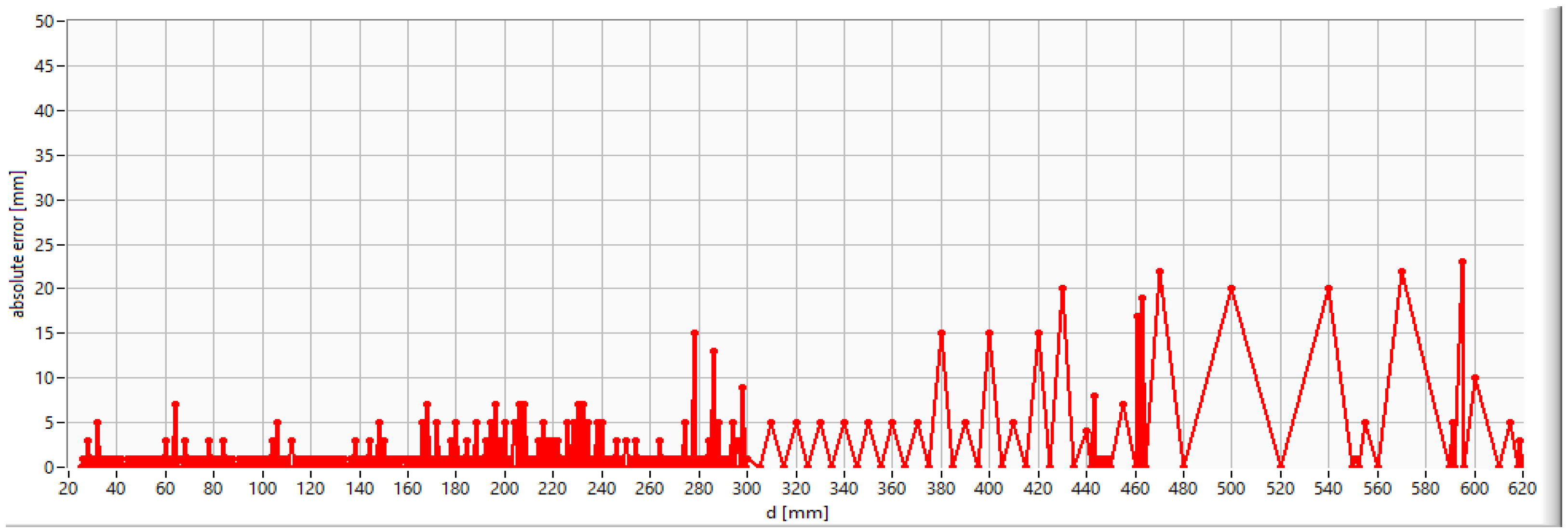
3.2. Measurement Stage
4. Discussion
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hamzah, R.A.; Ibrahim, H. Literature survey on stereo vision disparity map algorithms. J. Sens. 2016, 2016, 8742920. [Google Scholar] [CrossRef]
- Zaarane, A.; Slimani, I.; Al Okaishi, W.; Atouf, I.; Hamdoun, A. Distance measurement system for autonomous vehicles using stereo camera. Array 2020, 5, 100016. [Google Scholar] [CrossRef]
- Li, Q.; Chen, G. Fault distance location method of transmission line based on binocular vision technology. In Proceedings of the 7th International Conference on Intelligent Computing and Signal Processing, Xi’an, China, 15–17 April 2022; pp. 1807–1811. [Google Scholar]
- Wu, Y.; Shao, S.; Li, Y.; Chen, X.; Che, D.; Chen, J.; Du, K.; Jiang, R.; Huang, X.; Kan, D. Multi-beam optical phase array for long-range LiDAR and free-space data communication. Opt. Laser Technol. 2022, 151, 108027. [Google Scholar] [CrossRef]
- Overview of ARCore and Supported Development Environments. Available online: https://developers.google.com/ar/develop/ (accessed on 9 August 2022).
- How Does Structure Sensor Work? Available online: https://support.canvas.io/article/7-how-does-structure-sensor-work (accessed on 9 August 2022).
- Kinovea Features. Available online: https://www.kinovea.org/features.html (accessed on 9 August 2022).
- Kinect for Windows. Available online: https://docs.microsoft.com/en-us/windows/apps/design/devices/kinect-for-windows (accessed on 9 August 2022).
- de Arruda Mello, D.A.; Barbosa, F.A. The Optical Transmitter. In Digital Coherent Optical Systems, Optical Networks, 1st ed.; Mukherjee, B., Tomkos, I., Eds.; Springer: Cham, Switzerland, 2021; pp. 19–46. [Google Scholar]
- Jahid, A.; Alsharif, M.H.; Hall, T.J. A contemporary survey on free space optical communication: Potentials, technical challenges, recent advances and research direction. J. Netw. Comput. Appl. 2022, 200, 103311. [Google Scholar] [CrossRef]
- Tran, T.; Zhang, X. Process monitoring and inspection. In Digital Manufacturing; Trombaco, R.G., Ed.; Elsevier: Amsterdam, The Netherlands, 2022; pp. 387–442. [Google Scholar]
- Jo, K.; Gupta, M.; Nayar, S.K. SpeDo: 6 DOF ego-motion sensor using speckle defocus imaging. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 13–16 December 2015; pp. 4319–4327. [Google Scholar]
- Lee, J.; Gupta, M. Blocks-World Cameras. In Proceedings of the IEEE International Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021; pp. 11412–11422. [Google Scholar]
- Zhang, X.G.; Sun, Y.L.; Zhu, B.; Jiang, W.X.; Yu, Q.; Tian, H.W.; Qiu, C.-W.; Zhang, Z.; Cui, T.J. A metasurface-based light-to-microwave transmitter for hybrid wireless communications. Light Sci. Appl. 2022, 11, 126. [Google Scholar] [CrossRef]
- Kirrbach, R.; Faulwaßer, M.; Schneider, T.; Meißner, P.; Noack, A.; Deicke, F. Monolitic Hybrid Transmitter-Receiver Lens for Rotary On-Axis Communications. Appl. Sci. 2020, 10, 1540. [Google Scholar] [CrossRef]
- Nagashima, K.; Ishikawa, Y.; Izawa, A.; Nishita, M.; Matsubara, N.; Ishii, H.; Saeyang, T.; Ogiso, Y.; Ueda, Y.; Kohtoku, M. Transmitter-receiver optical sub assembly using ultra-compact tunable DBR/ring laser. In Proceedings of the IEEE Optical Fiber Communications Conference and Exhibition, Washington, DC, USA, 6–11 June 2021; pp. 1–3. [Google Scholar]
- Yang, C.; Huang, X.; Zheng, Y.; Xie, Y.; Duan, X. Non-contact Breathing Rate Detection Based on Time of Flight Sensor. In Proceedings of the 43rd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Guadalajara, Mexico, 1–5 November 2021; pp. 7284–7287. [Google Scholar]
- Zhang, X.; Shao, W.; Zhou, M.; Tan, Q.; Li, J. A scene comprehensive safety evaluation method based on binocular camera. Rob. Auton. Syst. 2020, 128, 103503. [Google Scholar] [CrossRef]
- Wu, C.; Yang, L.; Luo, Z.; Jiang, W. Linear Laser Scanning Measurement Method Tracking by a Binocular Vision. Sensors 2022, 22, 3572. [Google Scholar] [CrossRef]
- Xie, Q.; Hu, X.; Ren, L.; Qi, L.; Sun, Z. A Binocular Vision Application in IoT: Realtime Trustworthy Road Condition Detection System in Passable Area. IEEE Trans. Ind. Inform. 2022. [Google Scholar] [CrossRef]
- Xiang, H.; Cheng, L.; Wu, H.; Chen, Y.; Gao, Y. Mobile Robot Automatic Aiming Method Based on Binocular Vision. In Proceedings of the 40th Chinese Control Conference, Shanghai, China, 26–28 July 2021; pp. 4150–4156. [Google Scholar]
- Wang, Y.; Lai, Z.; Huang, G.; Wang, B.H.; van der Maaten, L.; Campbell, M.; Weinberger, K.Q. Anytime stereo image depth estimation on mobile devices. In Proceedings of the International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 5893–5900. [Google Scholar]
- Dai, H.; Zhang, X.; Zhao, Y.; Sun, H.; Zheng, N. Adaptive disparity candidates prediction network for efficient real-time stereo matching. IEEE Trans. Circuits Syst. Video Technol. 2021, 32, 3099–3110. [Google Scholar] [CrossRef]
- Huang, H.; Chen, F.; Cheng, H.; Li, L.; Wang, M. Semantic segmentation guided feature point classification and seam fusion for image stitching. J. Algorithm Comput. Technol. 2021, 15, 17483026211065399. [Google Scholar] [CrossRef]
- Zhou, C.; Yu, H.; Yuan, B.; Wang, L.; Yang, Q. Three-Dimensional Stitching of Binocular Endoscopic Images Based on Feature Points. Photonics 2021, 8, 330. [Google Scholar] [CrossRef]
- Yu, F.; Gallup, D. 3D reconstruction from accidental motion. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 24–27 June 2014; pp. 3986–3993. [Google Scholar]
- Im, S.; Ha, H.; Choe, G.; Jeon, H.-G.; Joo, K.; Kweon, I.S. Accurate 3D reconstruction from small motion clip for rolling shutter cameras. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 41, 775–787. [Google Scholar] [CrossRef] [PubMed]
- Im, S.; Ha, H.; Jeon, H.-G.; Lin, S.; Kweon, I.S. Deep Depth from Uncalibrated Small Motion Clip. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 43, 1225–1238. [Google Scholar] [CrossRef] [PubMed]
- Aswini, N.; Uma, S.V. Obstacle avoidance and distance measurement for unmanned aerial vehicles using monocular vision. Int. J. Electr. Comput. 2019, 9, 3504. [Google Scholar]
- Ali, U.; Mahmood, M.T. Robust focus volume regularization in shape from focus. IEEE Trans. Image Process. 2021, 30, 7215–7227. [Google Scholar] [CrossRef]
- Li, Y.; Fu, Y.; Zhong, K.; Ma, B.; Yan, Z. A virtual binocular line-structured light measurement method based on a plane mirror. Opt. Commun. 2022, 510, 127974. [Google Scholar] [CrossRef]
- Gladines, J.; Sels, S.; Blom, J.; Vanlanduit, S. A Fast Shape-from-Focus-Based Surface Topography Measurement Method. Sensors 2021, 21, 2574. [Google Scholar] [CrossRef]
- Vignesh, S.M.; Senthilnathan, R. A Focus-Measurement Based 3D Surface Reconstruction System for Dimensional Metrology. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1012, 012038. [Google Scholar] [CrossRef]
- Nayar, S.K.; Nakagawa, Y. Shape from focus. IEEE Trans. Pattern Anal. Mach. Intell. 1994, 16, 24–831. [Google Scholar]
- Subbarao, M.; Choi, T. Accurate recovery of three-dimensional shape from image focus. IEEE Trans. Pattern Anal. Mach. Intell. 1995, 17, 266–274. [Google Scholar] [CrossRef]
- Asokan, A.; Anitha, J.; Ciobanu, M.; Gabor, A.; Naaji, A.; Hemanth, D.J. Image Processing Techniques for Analysis of Satellite Images for Historical Maps Classification—An Overview. Appl. Sci. 2020, 10, 4207. [Google Scholar] [CrossRef]
- Prajapati, P.; Narmawala, Z.; Darji, N.P.; Moorthi, S.M.; Ramakrishnan, R. Evaluation of perceptual contrast and sharpness measures for meteorological satellite images. Procedia Comput. Sci. 2015, 57, 17–24. [Google Scholar] [CrossRef]
- Skibicki, J.; Golijanek-Jędrzejczyk, A.; Dzwonkowski, A. The Influence of Camera and Optical System Parameters on the Uncertainty of Object Location Measurement in Vision Systems. Sensors 2020, 20, 5433. [Google Scholar] [CrossRef]
- Zuckerman, M.; Kolberg, E. Distance Estimation to Image Objects Using Adapted Scale. Int. J. Eng. Sci. 2017, 6, 39–50. [Google Scholar] [CrossRef]
- Chen, Y.; Jin, X.; Dai, Q. Distance measurement based on light field geometry and ray tracing. Opt. Express 2017, 25, 59–76. [Google Scholar] [CrossRef]
- Hahne, C.; Aggoun, A.; Haxha, S.; Velisavljevic, V.; Fernández, J.C.J. Light field geometry of a standard plenoptic camera. Opt. Express 2014, 22, 26659–26673. [Google Scholar] [CrossRef]
- Setyawan, R.A.; Soenoko, R.; Mudjirahardjo, P.; Choiron, M.A. Measurement accuracy analysis of distance between cameras in stereo vision. In Proceedings of the IEEE Electrical Power, Electronics, Communications, Controls and Informatics Seminar (EECCIS), Batu, Indonesia, 9–11 October 2018; pp. 169–172. [Google Scholar]
- Megalingam, R.K.; Shriram, V.; Likhith, B.; Rajesh, G.; Ghanta, S. Monocular distance estimation using pinhole camera approximation to avoid vehicle crash and back-over accidents. In Proceedings of the IEEE 10th International Conference on Intelligent Systems and Control (ISCO), Coimbatore, India, 7–8 January 2016; pp. 1–5. [Google Scholar]
- Dragne, C.; Todiriţe, I.; Iliescu, M.; Pandelea, M. Distance Assessment by Object Detection—For Visually Impaired Assistive Mechatronic System. Appl. Sci. 2022, 12, 6342. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Lens’ Position (i) | Polynomial Coefficients | ||||||
|---|---|---|---|---|---|---|---|
| a0 | a1 | a2 | a3 | a4 | a5 | a6 | |
| 0 | 1.00242 | −3.41879 × 10−3 | −292321 × 10−4 | 4.05166 × 10−6 | −2.16663 × 10−8 | 5.22761 × 10−11 | −4.74343 × 10−14 |
| 1 | 0.898721 | 6.36388 × 10−3 | −4.76928 × 10−4 | 5.53824 × 10−6 | −2.7626 × 10−8 | 6.40214 × 10−11 | −5.65194 × 10−14 |
| 2 | 0.802894 | 1.44673 × 10−2 | −5.99068 × 10−4 | 6.25795 × 10−6 | −2.94182 × 10−8 | 6.53407 × 10−11 | −5.57859 × 10−14 |
| 3 | 0.704034 | 1.85123 × 10−2 | −5.59871 × 10−4 | 5.0166 × 10−6 | −2.07422 × 10−8 | 4.09188 × 10−11 | −3.11744 × 10−14 |
| 4 | 0.672847 | 1.47299 × 10−2 | −3.34911 × 10−4 | 2.04935 × 10−6 | −4.44685 × 10−8 | 3.8416 × 10−11 | 6.60522 × 10−15 |
| 5 | 0.684477 | 6.57673 × 10−3 | −2.49564 × 10−5 | −1.41218 × 10−6 | 1.24868 × 10−8 | −3.79673 × 10−11 | 3.95845 × 10−14 |
| 6 | 0.707126 | −1.54146 × 10−3 | 2.0778 × 10−4 | −3.24671 × 10−6 | 1.81618 × 10−8 | −4.42197 × 10−11 | 3.99154 × 10−14 |
| 7 | 0.745179 | −9.34635 × 10−3 | 3.99719 × 10−4 | −4.82945 × 10−6 | 2.47073 × 10−8 | −5.8496 × 10−11 | 5.28991 × 10−14 |
| 8 | 0.831732 | −2.12925 × 10−2 | 6.80613 × 10−4 | −7.49486 × 10−6 | 3.79759 × 10−8 | −9.16576 × 10−11 | 8.50388 × 10−14 |
| 9 | 0.706765 | −4.9561 × 10−3 | 1.48598 × 10−4 | −1.44829 × 10−6 | 7.39629 × 10−9 | −1.89172 × 10−11 | 1.82406 × 10−14 |
| 10 | 0.704984 | −6.61971 × 10−3 | 1.71546 × 10−4 | −1.6138 × 10−6 | 7.1569 × 10−9 | −1.44787 × 10−11 | 1.04764 × 10−14 |
| 11 | 0.690874 | −4.97126 × 10−3 | 1.07935 × 10−4 | −8.17178 × 10−7 | 2.66015 × 10−9 | −2.95716 × 10−12 | −3.20389 × 10−16 |
| 12 | 0.687389 | −4.74209 × 10−3 | 9.63782 × 10−5 | −6.6829 × 10−7 | 1.82623 × 10−9 | −8.70554 × 10−13 | −2.20633 × 10−15 |
| 13 | 0.682394 | −4.54304 × 10−3 | 8.85567 × 10−5 | −5.72535 × 10−7 | 1.29942 × 10−9 | 4.56257 × 10−13 | −3.44156 × 10−15 |
| 14 | 0.677695 | −4.47291 × 10−3 | 8.77463 × 10−5 | −5.72904 × 10−7 | 1.33118 × 10−9 | 3.31304 × 10−13 | −3.29169 × 10−15 |
| 15 | 0.674817 | −4.50933 × 10−3 | 8.79664 × 10−5 | −5.6798 × 10−7 | 1.27092 × 10−9 | 5.60098 × 10−13 | −3.57643 × 10−15 |
| Distance [mm] | Zuckerman M., et al. 2017 [39] | Yankin C., et al. 2017 [40] | Hahne C., et al. 2014 [41] | Setyawan R.A., et al. 2018 [42] | Megalingam R.K., et al. 2016 [43] | Dragne C., et al. 2022 [44] | Proposed Method |
|---|---|---|---|---|---|---|---|
| 50 | 6% | 2% | |||||
| 100 | 23 % | 6.3% | 1% | ||||
| 150 | 0.2% | 2.7% | 10.6% | 0.7% | |||
| 200 | 7% | 1.5% | 4.7% | 3.5% | 2.72% | 2.5% | |
| 250 | 7.2% | 5.3% | 1.2% | ||||
| 300 | 11% | 1.7% | 5.9% | 6.22% | 0.4% | ||
| 350 | 7% | 1.5% | |||||
| 400 | 2% | 3.7% | |||||
| 450 | 1.3% | 2% | 6.7% | 0.3% | |||
| 500 | 2% | 2.5% | 4% | ||||
| 550 | 6.1% | 0.3% | |||||
| 600 | 9% | 2.4% | 7% | 2.1% | 1.7% | ||
| 650 | 5.3% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Serea, E.; Penciuc, M.; Temneanu, M.C.; Donciu, C. Video Distance Measurement Technique Using Least Squares Based Sharpness Cost Function. Mathematics 2022, 10, 3273. https://doi.org/10.3390/math10183273
Serea E, Penciuc M, Temneanu MC, Donciu C. Video Distance Measurement Technique Using Least Squares Based Sharpness Cost Function. Mathematics. 2022; 10(18):3273. https://doi.org/10.3390/math10183273
Chicago/Turabian StyleSerea, Elena, Mihai Penciuc, Marinel Costel Temneanu, and Codrin Donciu. 2022. "Video Distance Measurement Technique Using Least Squares Based Sharpness Cost Function" Mathematics 10, no. 18: 3273. https://doi.org/10.3390/math10183273
APA StyleSerea, E., Penciuc, M., Temneanu, M. C., & Donciu, C. (2022). Video Distance Measurement Technique Using Least Squares Based Sharpness Cost Function. Mathematics, 10(18), 3273. https://doi.org/10.3390/math10183273